Результат интеллектуальной деятельности: Устройство идентификации параметров акселерометра
Вид РИД
Изобретение
Изобретение относится к измерительной технике. Оно предназначено для коррекции динамической погрешности датчиков ускорения в условиях параметрической неопределенности.
Необходимость разработки устройства идентификации параметров акселерометра связана с тем, что датчики ускорений MEMS находят широкое применение в радиоэлектронной аппаратуре летательных аппаратов, навигационных системах. К примеру, они обеспечивают высокую точность решения навигационной задачи, когда системы GPS или ГЛОНАС не работоспособны. Поэтому к динамической погрешности MEMS-акселерометров предъявляются жесткие требования. Ее снижение обеспечивается эффективным решением задач диагностики, калибровки, текущей идентификации параметров измерительного преобразователя. С позиций системного подхода они объединяются общей постановкой и решением обратной измерительной задачи [1].
Известно устройство идентификации параметров динамических систем, в основе которого лежит фильтр Калмана [2]. Его эффективное функционирование возможно в случае априорной определенности законов распределения внешних воздействий, что является существенным недостатком.
Наиболее близким по технической сущности к заявленному изобретению является устройство идентификации параметров динамических систем на основе вариационных принципов [3], которое отличается от фильтра Калмана минимумом вычислительных затрат и точностью. Однако оно не учитывает особенностей цифровых систем обработки измерительной информации, связанных с дискретной обработкой данных. Поэтому практическая реализация положенного в его основу метода [1], требует разработки нового дискретно алгоритма идентификации [4] и соответствующего устройства.
Цель изобретения - снижение объема вычислительных затрат и увеличение быстродействия.
Указанный технический результат достигается за счет применения дискретного алгоритма идентификации [4], который практически реализуем с использованием электронных вычислительных машин. Устройство идентификации параметров акселерометра содержит следующие блоки:
0 - блок хранения констант,
1.1 - первый блок формирования суммы,
1.2 - второй блок формирования суммы,
1.3 - третий блок формирования суммы,
1.4 - четвертый блок формирования суммы,
1.5 - пятый блок формирования суммы,
2.1 - первый блок формирования разности,
2.2 - второй блок формирования разности,
2.3 - третий блок формирования разности,
2.4 - четвертый блок формирования разности,
2.5 - пятый блок формирования разности,
2.6 - шестой блок формирования разности,
2.7 - седьмой блок формирования разности,
2.8 - восьмой блок формирования разности,
2.9 - девятый блок формирования разности,
3.1 - первый блок произведения,
3.2 - второй блок произведения,
3.3 - третий блок произведения,
3.4 - четвертый блок произведения,
3.5 - пятый блок произведения,
3.6 - шестой блок произведения,
3.7 - седьмой блок произведения,
3.8 - восьмой блок произведения,
3.9 - девятый блок произведения,
3.10 - десятый блок произведения,
3.11 - одиннадцатый блок произведения,
3.12 - двенадцатый блок произведения,
3.13 - тринадцатый блок произведения,
3.14 - четырнадцатый блок произведения,
3.15 - пятнадцатый блок произведения,
3.16 - шестнадцатый блок произведения,
3.17 - семнадцатый блок произведения,
3.18 - восемнадцатый блок произведения,
3.19 - девятнадцатый блок произведения,
3.20 - двадцатый блок произведения,
3.21 - двадцать первый блок произведения,
4.1 - первый блок деления,
4.2 - второй блок деления,
4.3 - третий блок деления,
5.1 - первый блок возведения в минус первую степень,
5.2 - второй блок возведения в минус первую степень,
5.3 - третий блок возведения в минус первую степень,
6.1 - первый блок возведения в квадрат,
6.2 - второй блок возведения в квадрат,
6.3 - третий блок возведения в квадрат,
7 - блок формирования sin.
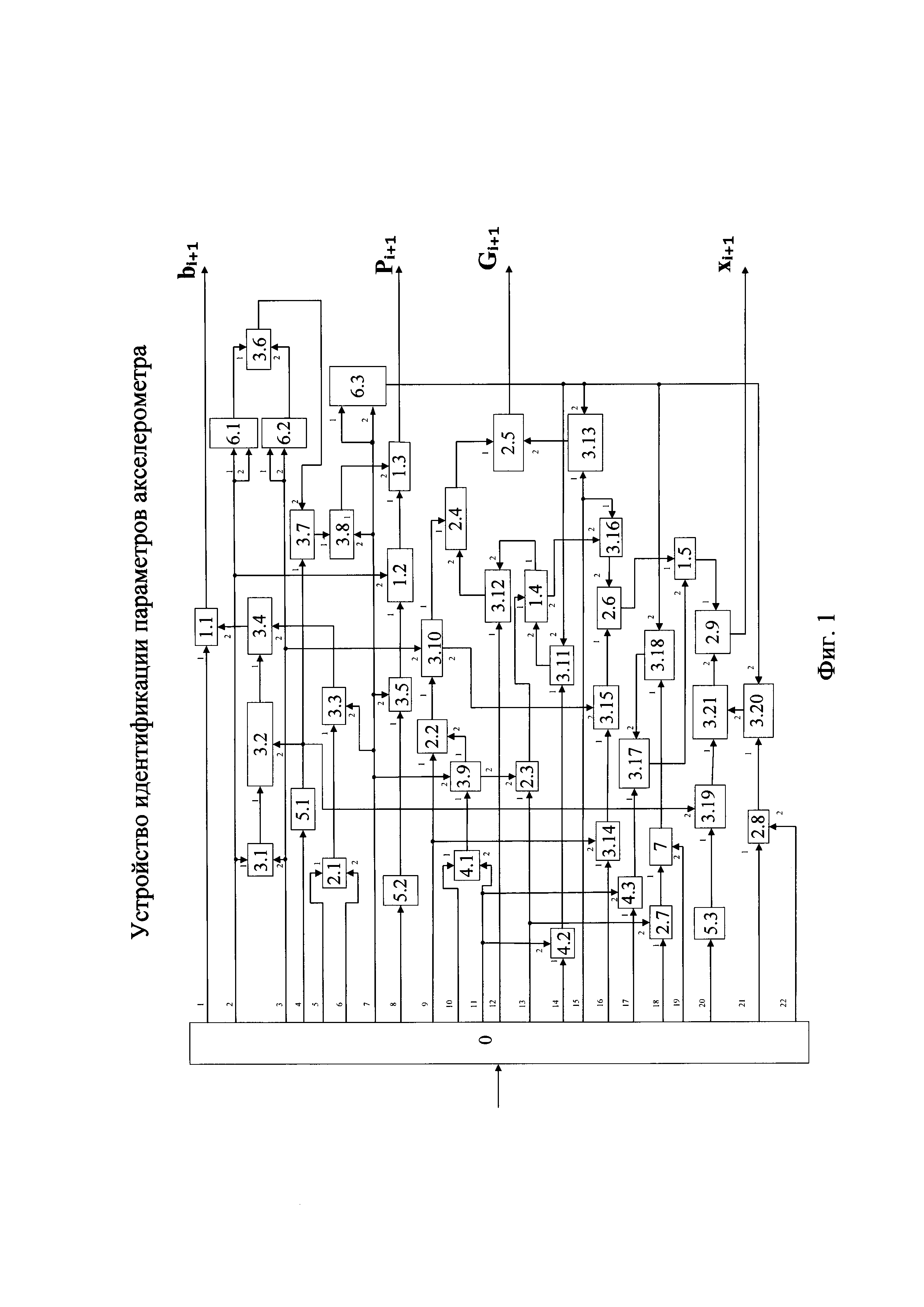
Сущность изобретения поясняется фиг. 1, где представлено устройство идентификации параметров акселерометра. Вход блока 0 является входом устройства, первый выход которого соединен с первым входом блока 1.1; второй выход блока 0 соединен с первыми входами блоков 3.1, 6.1 и со вторым входами блоков 1.2, 6.1; третий выход блока 0 соединен с первым входом блока 6.1 и вторыми входами блоков 3.1, 3.10, 6.2; выход блока 3.1 соединен с первым входом блока 3.2; выходы блоков 6.1 и 6.2 соединены с первым и вторым входами блока 3.6 соответственно; выход блока 3.6 соединен со вторым входом блока 3.7; четвертый выход блока 0 соединен с входом блока 5.1, выход которого соединен с первым входом блока 3.7 и вторыми входами блоков 3.2 и 3.19; выход блока 3.2 соединен с первым входом блока 3.4; выход блока 3.7 соединен с первым входом блока 3.8; пятый и шестой выходы блока 0 соединены с первым и вторым входами блока 2.1 соответственно, выход которого соединен с первым входом блока 3.3; седьмой выход блока 0 соединен с первым входом блока 6.3 и вторыми входами блоков 3.3, 3.5, 3.8, 3.9, 6.3; выход блока 3.3 соединен со вторым входом блока 3.4, выход которого соединен со вторым входом блока 1.1, выход которого является первым выходом устройства; выход блока 3.8 соединен со вторым входом блока 1.3; выход блока 6.3 соединен со вторыми входами блоков 3.11, 3.13, 3.18, 3.20; восьмой выход блока 0 соединен с входом блока 5.2, выход которого соединен с первым входом блока 3.5, выход которого соединен с первым входом блока 1.2, выход которого соединен с первым входом блока 1.3, выход которого является вторым выходом устройства; девятый выход блока 0 соединен с первым входом блока 2.2 и вторым входом блока 3.14; десятый выход блока 0 соединен с первым входом блока 4.1; одиннадцатый выход блока 0 соединен со вторыми входами блоков 4.1, 4.2, 4.3; выход блока 4.1 соединен с первым входом блока 3.9, первый выход которого соединен со вторым входом блока 2.2, выход которого соединен с первым входом блока 3.10, первый выход которого соединен с первым входом блока 2.4, второй выход блока 3.10 соединен со вторым входом блока 3.15; второй выход блока 3.9 соединен со вторым входом блока 2.3; двенадцатый выход блока 0 соединен с первым входом блока 3.12; тринадцатый выход блока 0 соединен с первым входом блока 2.3 и вторым входом блока 2.7; выход блока 2.3 соединен с первым входом блока 1.4; четырнадцатый выход блока 0 соединен с первым входом блока 4.2, выход которого соединен с первым входом блока 3.11, выход которого соединен со вторым входом блока 1.4, первый выход которого соединен со вторым входом блока 3.12, выход которого соединен со вторым входом блока 2.4, выход которого соединен с первым входом блока 2.5; второй выход блока 1.4 соединен со вторым входом блока 3.16; пятнадцатый выход блока 0 соединен с первыми входами блоков 3.13 и 3.16; выход блока 3.13 соединен со вторым входом блока 2.5, выход которого является третьим выходом устройства; выход блока 3.16 соединен со вторым входом блока 2.6; шестнадцатый выход блока 0 соединен с первым входом блока 3.14, выход которого соединен с первым входом блока 3.15, выход которого соединен с первым входом блока 2.6, выход которого соединен с первым входом блока 1.5; семнадцатый выход блока 0 соединен с первым входом блока 4.3, выход которого соединен с первым входом блока 3.17; восемнадцатый выход блока 0 соединен с первым входом блока 2.7, выход которого соединен с первым входом блока 7; девятнадцатый выход блока 0 соединен со вторым входом блока 7, выход которого соединен с первым входом блока 3.18, выход которого соединен со вторым входом блока 3.17, выход которого соединен со вторым входом блока 1.5, выход которого соединен с первым входом блока 2.9; двадцатый выход блока 0 соединен с входом блока 5.3, выход которого соединен с первым входом блока 3.19, выход которого соединен с первым входом блока 3.21; двадцать первый выход блока 0 соединен с первым входом блока 2.8; двадцать второй выход блока 0 соединен со вторым входом блока 2.8, выход которого соединен с первым входом блока 3.20, выход которого соединен со вторым входом блока 3.21, выход которого соединен со вторым входом блока 2.9, выход которого является четвертым выходом устройства.
Пояснить работу устройства позволяет следующий пример. Рассмотрим задачу идентификации параметра динамической системы, работа которой описывается дифференциальным уравнением второго порядка вида

где х - координата системы; b - неизвестный параметр системы, t∈[0, 500].
Уравнение наблюдение такой системы имеет вид

где n - белый гауссовский шум с σ=0.01.
Динамика идентифицируемого параметра b описывается уравнением

Требуется идентифицировать параметр b=3 при условии минимума целевого функционала

Для решения поставленной задачи (1)-(4) целесообразно использовать разработанный в [3] алгоритм, который с применением к нему аппроксимации по методу Эйлера примет следующий дискретный вид
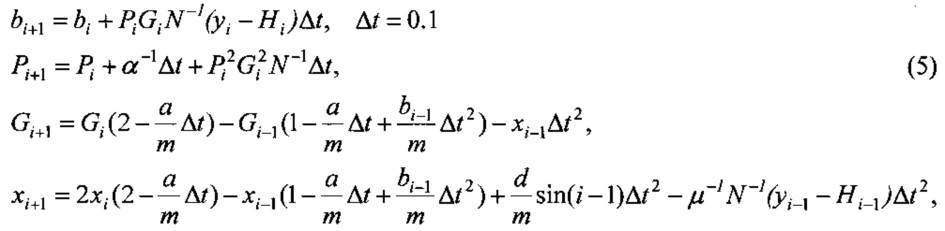
где Р - некоторая матрица размера m×m, G - матрица чувствительности системы (1) по вектору параметров b, N - матрица односторонней спектральной плотности шума наблюдения, α - параметр регуляризации, μ - неопределенный множитель Лагранжа, I - единичная матрица [4].
Устройство работает следующим образом. В исходном состоянии на вход блока 0 подаются начальные данные измеренных и заданных величин. В момент времени i с первого выхода блока 0 формируется значение bi и поступает на первый вход блока 1.1, со второго выхода блока 0 формируется значение Pi и поступает на первые входы блоков 3.1, 6.1 и вторые входы блоков 1.2, 6.1, на выходе блока 6.1 формируется значение  и поступает на первый вход блока 3.6, с третьего выхода блока 0 формируется значение Gi и поступает на первый вход блока 6.2 и вторые входы блоков 3.1, 3.10, 6.2, на выходе блока 6.2 формируется значение
и поступает на первый вход блока 3.6, с третьего выхода блока 0 формируется значение Gi и поступает на первый вход блока 6.2 и вторые входы блоков 3.1, 3.10, 6.2, на выходе блока 6.2 формируется значение  и поступает на второй вход блока 3.6, на выходе которого формируется значение
и поступает на второй вход блока 3.6, на выходе которого формируется значение  и поступает на второй вход блока 3.7, на выходе блока 3.1 формируется значение PiGi и поступает на первый вход блока 3.2, с четвертого выхода блока 0 формируется значение N и поступает на вход блока 5.1, на выходе которого формируется значение N-1 и поступает первый вход блока 3.7 и вторые входа блоков 3.2 и 3.19, на выходе блока 3.2 формируется значение PiGiN-1 и поступает на первый вход блока 3.4, на выходе блока 3.7 формируется значение
и поступает на второй вход блока 3.7, на выходе блока 3.1 формируется значение PiGi и поступает на первый вход блока 3.2, с четвертого выхода блока 0 формируется значение N и поступает на вход блока 5.1, на выходе которого формируется значение N-1 и поступает первый вход блока 3.7 и вторые входа блоков 3.2 и 3.19, на выходе блока 3.2 формируется значение PiGiN-1 и поступает на первый вход блока 3.4, на выходе блока 3.7 формируется значение  и поступает на первый вход блока 3.8, на пятом выходе блока 0 формируется значение yi и поступает на первый вход блока 2.1, на шестом выходе блока 0 формируется значение Hi и поступает на второй вход блока 2.1, на выходе которого формируется значение (yi-Hi) и поступает на первый вход блока 3.3, на седьмом выходе блока 0 формируется значение Δt и поступает на первый вход блока 6.3 и вторые входа блоков 3.3, 3.5, 3.8, 3.9, 6.3, на выходе последнего формируется значение Δt2 и подается на вторые входа блоков 3.11, 3.13, 3.18, 3.20, на выходе блока 3.3 формируется значение (yi-Hi)Δt и поступает на второй вход блока 3.4, на выходе которого формируется значение PiGiN-1(yi-Hi)Δt и поступает на второй вход блока 1.1, на выходе которого формируется значение bi+PiGiN-1(yi-Hi)Δt, равное bi+1, которое снимается с первого выхода устройства, на выходе блока 3.8 формируется значение
и поступает на первый вход блока 3.8, на пятом выходе блока 0 формируется значение yi и поступает на первый вход блока 2.1, на шестом выходе блока 0 формируется значение Hi и поступает на второй вход блока 2.1, на выходе которого формируется значение (yi-Hi) и поступает на первый вход блока 3.3, на седьмом выходе блока 0 формируется значение Δt и поступает на первый вход блока 6.3 и вторые входа блоков 3.3, 3.5, 3.8, 3.9, 6.3, на выходе последнего формируется значение Δt2 и подается на вторые входа блоков 3.11, 3.13, 3.18, 3.20, на выходе блока 3.3 формируется значение (yi-Hi)Δt и поступает на второй вход блока 3.4, на выходе которого формируется значение PiGiN-1(yi-Hi)Δt и поступает на второй вход блока 1.1, на выходе которого формируется значение bi+PiGiN-1(yi-Hi)Δt, равное bi+1, которое снимается с первого выхода устройства, на выходе блока 3.8 формируется значение  и поступает на второй вход блока 1.3, на восьмом выходе блока 0 формируется значение α и поступает на вход блока 5.2, на выходе которого формируется значение α-1 и поступает на первый вход блока 3.5, на выходе которого формируется значение α-1Δt и поступает на первый вход блока 1.2, на выходе которого формируется значение Pi+α-1Δt и поступает на первый вход блока 1.3, на выходе которого формируется значение
и поступает на второй вход блока 1.3, на восьмом выходе блока 0 формируется значение α и поступает на вход блока 5.2, на выходе которого формируется значение α-1 и поступает на первый вход блока 3.5, на выходе которого формируется значение α-1Δt и поступает на первый вход блока 1.2, на выходе которого формируется значение Pi+α-1Δt и поступает на первый вход блока 1.3, на выходе которого формируется значение  , равное Pi+1, которое снимается со второго выхода устройства, на девятом выходе блока 0 формируется значение 2 и поступает на первый вход блока 2.2 и второй вход блока 3.14, на десятом выходе блока 0 формируется значение a и поступает на первый вход блока 4.1, на одиннадцатом выходе блока 0 формируется значение m и поступает на вторые входы блоков 4.1, 4.2, 4.3, на выходе блока 4.1 формируется значение
, равное Pi+1, которое снимается со второго выхода устройства, на девятом выходе блока 0 формируется значение 2 и поступает на первый вход блока 2.2 и второй вход блока 3.14, на десятом выходе блока 0 формируется значение a и поступает на первый вход блока 4.1, на одиннадцатом выходе блока 0 формируется значение m и поступает на вторые входы блоков 4.1, 4.2, 4.3, на выходе блока 4.1 формируется значение  и поступает на первый вход блока 3.9, на первом и втором выходе которого формируется значение
и поступает на первый вход блока 3.9, на первом и втором выходе которого формируется значение  и поступает на вторые входа блоков 2.2 и 2.3 соответственно, на выходе блока 2.2 формируется значение
и поступает на вторые входа блоков 2.2 и 2.3 соответственно, на выходе блока 2.2 формируется значение  и поступает на первый вход блока 3.10, на первом и втором выходе которого формируется значение
и поступает на первый вход блока 3.10, на первом и втором выходе которого формируется значение  и поступает на первый вход блока 2.4 и второй вход блока 3.15 соответственно, на двенадцатом выходе блока 0 формируется значение Gi-1 и поступает на первый вход блока 3.12, на тринадцатом выходе блока 0 формируется значение 1 и поступает на первый вход блока 2.3 и второй вход блока 2.7, на выходе блока 2.3 формируется значение
и поступает на первый вход блока 2.4 и второй вход блока 3.15 соответственно, на двенадцатом выходе блока 0 формируется значение Gi-1 и поступает на первый вход блока 3.12, на тринадцатом выходе блока 0 формируется значение 1 и поступает на первый вход блока 2.3 и второй вход блока 2.7, на выходе блока 2.3 формируется значение  и поступает на первый вход блока 1.4, на четырнадцатом выходе блока 0 формируется значение bi-1 и поступает на первый вход блока 4.2, на выходе которого формируется значение
и поступает на первый вход блока 1.4, на четырнадцатом выходе блока 0 формируется значение bi-1 и поступает на первый вход блока 4.2, на выходе которого формируется значение  и поступает на первый вход блока 3.11, на выходе которого формируется значение
и поступает на первый вход блока 3.11, на выходе которого формируется значение  и поступает на второй вход блока 1.4. на первом и втором выходах которого формируется значение
и поступает на второй вход блока 1.4. на первом и втором выходах которого формируется значение  и поступает на вторые входа блоков 3.12 и 3.16 соответственно, на выходе блока 3.12 формируется значение
и поступает на вторые входа блоков 3.12 и 3.16 соответственно, на выходе блока 3.12 формируется значение  и поступает на второй вход блока 2.4 на выходе которого формируется значение
и поступает на второй вход блока 2.4 на выходе которого формируется значение  и поступает на первый вход блока 2.5, на пятнадцатом выходе блока 0 формируется значение xi-1 и подается на первые входы блоков 3.13 и 3.16, на выходе последнего формируется значение
и поступает на первый вход блока 2.5, на пятнадцатом выходе блока 0 формируется значение xi-1 и подается на первые входы блоков 3.13 и 3.16, на выходе последнего формируется значение  и поступает на второй вход блока 2.6, на выходе блока 3.13 формируется значение xi-1Δt2 и поступает на второй вход блока 2.5, на выходе которого формируется значение
и поступает на второй вход блока 2.6, на выходе блока 3.13 формируется значение xi-1Δt2 и поступает на второй вход блока 2.5, на выходе которого формируется значение  , равное Gi+1, которое снимается с третьего выхода устройства, на шестнадцатом выходе блока 0 формируется значение xi и поступает на первый вход блока 3.14, на выходе которого формируется значение 2xi и поступает на первый вход блока 3.15, на выходе которого формируется значение
, равное Gi+1, которое снимается с третьего выхода устройства, на шестнадцатом выходе блока 0 формируется значение xi и поступает на первый вход блока 3.14, на выходе которого формируется значение 2xi и поступает на первый вход блока 3.15, на выходе которого формируется значение  и поступает на первый вход блока 2.6, на выходе которого формируется значение
и поступает на первый вход блока 2.6, на выходе которого формируется значение  и поступает на первый вход блока 1.5, на семнадцатом выходе блока 0 формируется значение d и поступает на первый вход блока 4.3, на выходе которого формируется значение
и поступает на первый вход блока 1.5, на семнадцатом выходе блока 0 формируется значение d и поступает на первый вход блока 4.3, на выходе которого формируется значение  и поступает на первый вход блока 3.17, на восемнадцатом выходе блока 0 формируется значение i-го момента и поступает на первый вход блока 2.7, на выходе которого формируется значение (i-1) и поступает на первый вход блока 7, на девятнадцатом выходе блока 0 формируется значение sin аргумента и поступает на второй вход блока 7, на выходе которого формируется значение sin(i-1) и поступает на первый вход блока 3.18, на выходе которого формируется значение sin(i-1)Δt2 и поступает на второй вход блока 3.17, на выходе которого формируется значение
и поступает на первый вход блока 3.17, на восемнадцатом выходе блока 0 формируется значение i-го момента и поступает на первый вход блока 2.7, на выходе которого формируется значение (i-1) и поступает на первый вход блока 7, на девятнадцатом выходе блока 0 формируется значение sin аргумента и поступает на второй вход блока 7, на выходе которого формируется значение sin(i-1) и поступает на первый вход блока 3.18, на выходе которого формируется значение sin(i-1)Δt2 и поступает на второй вход блока 3.17, на выходе которого формируется значение  и поступает на второй вход блока 1.5, на выходе которого формируется значение
и поступает на второй вход блока 1.5, на выходе которого формируется значение  и поступает на первый вход блока 2.9, на двадцатом выходе блока 0 формируется значение μ и поступает на вход блока 5.3, на выходе которого формируется значение μ-1 и поступает на первый вход блока 3.19, на выходе которого формируется значение μ-1N-1 и поступает на первый вход блока 3.21, на двадцать первом выходе блока 0 формируется значение yi-1 и поступает на первый вход блока 2.8, на двадцать втором выходе блока 0 формируется значение Hi-1 и поступает на второй вход блока 2.8, на выходе которого формируется значение (yi-1-Hi-1) и поступает на первый вход блока 3.20, на выходе которого формируется значение (yi-1-Hi-1)Δt2 и поступает на второй вход блока 3.21, на выходе которого формируется значение μ-1N-1(yi-1-Hi-1)Δt2 и поступает на второй вход блока 2.9, на выходе которого формируется значение
и поступает на первый вход блока 2.9, на двадцатом выходе блока 0 формируется значение μ и поступает на вход блока 5.3, на выходе которого формируется значение μ-1 и поступает на первый вход блока 3.19, на выходе которого формируется значение μ-1N-1 и поступает на первый вход блока 3.21, на двадцать первом выходе блока 0 формируется значение yi-1 и поступает на первый вход блока 2.8, на двадцать втором выходе блока 0 формируется значение Hi-1 и поступает на второй вход блока 2.8, на выходе которого формируется значение (yi-1-Hi-1) и поступает на первый вход блока 3.20, на выходе которого формируется значение (yi-1-Hi-1)Δt2 и поступает на второй вход блока 3.21, на выходе которого формируется значение μ-1N-1(yi-1-Hi-1)Δt2 и поступает на второй вход блока 2.9, на выходе которого формируется значение 
равное xi+1, которое снимается с четвертого выхода устройства.
В последующий момент времени i принимает значение i+1, а последовательность действий повторяется.
Литература
1. Андрашитов Д.С., Костоглотов А.А., Лазаренко С.В. Регуляризированный алгоритм многопараметрической вариационной идентификации динамических систем // Сервис в России и за рубежом, №8 (27) http://www.rguts.ru/electronic_journal/number27/contents.
2. Браммер К., Зиффлинг Г. Фильтр Калмана - Бьюси. М.: Наука, 1982, 210 с.
3. Патент РФ №2464615 от 20.10.2012 г. Устройство идентификации параметров динамических систем на основе вариационных принципов. // Андрашитов Д.С., Костоглотов А.А., Кузнецов А.А., Лазаренко С.В., Сметанникова Н.А.
4. Андрашитов Д.С., Дерябкин И.В., Костоглотов А.А., Лазаренко С.В. Дискретный алгоритм идентификации параметров технических систем // Сборник научных трудов по материалам МНПК «Мировая наука и образование в условиях современного общества», Часть 2, 30 октября 2014 г. - С. 102-106.
Устройство идентификации параметров акселерометра содержит следующие блоки: блок хранения констант; первый, второй, третий, четвертый и пятый блоки формирования суммы; первый, второй, третий, четвертый, пятый, шестой, седьмой, восьмой и девятый блоки формирования разности; первый, второй, третий, четвертый, пятый, шестой, седьмой, восьмой, девятый, десятый, одиннадцатый, двенадцатый, тринадцатый, четырнадцатый, пятнадцатый, шестнадцатый, семнадцатый, восемнадцатый, девятнадцатый, двадцатый и двадцать первый блоки произведения; первый, второй и третий блоки деления; первый, второй и третий блоки возведения в минус первую степень; первый, второй и третий блок возведения в квадрат; блок формирования sin, при этом на вход блока хранения констант, который является входом устройства, поступает значение наблюдаемой величины; первый выход блока хранения констант соединен с первым входом первого блока формирования суммы, выход четвертого блока произведения соединен со вторым входом первого блока формирования суммы, выход которого является первым выходом устройства, выход второго блока формирования суммы соединен с первым входом третьего блока формирования суммы, выход восьмого блока произведения соединен со вторым входом третьего блока формирования суммы, выход которого является вторым выходом устройства, выход четвертого блока формирования разности соединен с первым входом пятого блока формирования разности, выход тринадцатого блока произведения соединен со вторым входом пятого блока формирования разности, выход которого является третьим выходом устройства, выход пятого блока формирования суммы соединен с первым входом девятого блока формирования разности, выход двадцать первого блока произведения соединен со вторым входом девятого блока формирования разности, выход которого является четвертым выходом устройства, которое отличается тем, что в него введены третий, четвертый, пятый блоки формирования суммы, четвертый, пятый, шестой, седьмой, восьмой, девятый блоки формирования разности, двенадцатый, тринадцатый, четырнадцатый, пятнадцатый, шестнадцатый, семнадцатый, восемнадцатый, девятнадцатый, двадцатый, двадцать первый блоки произведения; первый, второй и третий блоки деления; третий блоки возведения в минус первую степень; первый, второй и третий блок возведения в квадрат; блок формирования sin.
Устройство идентификации лагранжевых динамических систем на основе итерационной регуляризации
Устройство определения технического состояния бортовых систем летательных аппаратов по результатам оценки параметров
Способ передачи информации сверхширокополосным импульсным сигналом
Устройство контура фазовой автоподстройки частоты с обратной связью на основе объединенного принципа максимума
Устройство управления объектом со свободным выбором поведения
Устройство управления частотой вращения асинхронного двигателя электроустановок
Способ формирования и ведения групповой меры частоты
Адаптивный экстраполятор
Цифровое устройство оценки параметров лчм-сигналов радиолокационной станции
Устройство терминального управления на основе вариационных принципов
Устройство идентификации лагранжевых динамических систем на основе итерационной регуляризации
Устройство определения технического состояния бортовых систем летательных аппаратов по результатам оценки параметров
Способ передачи информации сверхширокополосным импульсным сигналом
Устройство контура фазовой автоподстройки частоты с обратной связью на основе объединенного принципа максимума
Устройство управления объектом со свободным выбором поведения
Устройство управления частотой вращения асинхронного двигателя электроустановок
Способ формирования и ведения групповой меры частоты
Адаптивный экстраполятор
Цифровое устройство оценки параметров лчм-сигналов радиолокационной станции
Устройство терминального управления на основе вариационных принципов

