Результат интеллектуальной деятельности: УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ БОРТОВЫХ СИСТЕМ ЛЕТАТЕЛЬНЫХ АППАРАТОВ ПО РЕЗУЛЬТАТАМ ОЦЕНКИ ПАРАМЕТРОВ
Вид РИД
Изобретение
Изобретение относится к области цифровой вычислительной техники и может быть использовано в автоматических и автоматизированных системах различного назначения для определения технического состояния по результатам идентификации параметров бортовых систем летательного аппарата.
Известно устройство оценки диагностических признаков в основе которого лежит метод Калмановской фильтрации [1]. Его эффективное функционирование возможно в случае полной априорной информации и законов распределения внешних воздействий, что является существенным недостатком.
Наиболее близким по технической сущности к заявленному изобретению является устройство идентификации параметров динамических систем на основе вариационных принципов [2]. Однако его использование не позволяет получить требуемую точность при определении технического состояния бортовых систем летательных аппаратов.
Цель изобретения - повысить эффективность определения технического состояния по результатам идентификации параметров бортовых систем летательного аппарата. Указанный технический результат достигается за счет устройства определения технического состояния типовых бортовых систем летательных аппаратов по результатам оценки параметров, которое содержит следующие блоки: блок хранения констант; первый, второй, третий, четвертый, пятый, шестой, седьмой, восьмой, девятый, десятый блоки формирования произведения; блок формирования суммы; блок транспонирования; первый, второй блоки формирования разности; первый, второй, третий, четвертый блоки формирования функций  ,
,  ,
,  ,
,  соответственно; первый, второй, третий, четвертый блоки интегрирования; при этом на информационный вход блока хранения констант, который является входом устройства, поступает значение наблюдаемой величины; первый информационный выход блока хранения констант соединен с первым информационным входом блока формирования суммы; второй информационный выход блока хранения констант соединен с первым информационным входом первого блока формирования произведения и информационным входом блока транспонирования; третий информационный выход блока хранения констант соединен со вторыми информационными входами первого блока формирования произведения и первым информационным входом четвертого блока формирования произведения; четвертый информационный выход блока хранения констант соединен с первым информационным входом третьего блока формирования произведения и вторыми информационными входами шестого и девятого блоков формирования произведения; пятый информационный выход блока хранения констант соединен с первым информационным входом восьмого блока формирования произведения; шестой информационный выход блока хранения констант соединен с первым информационным входом второго блока формирования разности; седьмой информационный выход блока хранения констант соединен с первыми информационными входами первого, второго, третьего, четвертого блоков формирования функций
,
,
соответственно; первый, второй, третий, четвертый блоки интегрирования; при этом на информационный вход блока хранения констант, который является входом устройства, поступает значение наблюдаемой величины; первый информационный выход блока хранения констант соединен с первым информационным входом блока формирования суммы; второй информационный выход блока хранения констант соединен с первым информационным входом первого блока формирования произведения и информационным входом блока транспонирования; третий информационный выход блока хранения констант соединен со вторыми информационными входами первого блока формирования произведения и первым информационным входом четвертого блока формирования произведения; четвертый информационный выход блока хранения констант соединен с первым информационным входом третьего блока формирования произведения и вторыми информационными входами шестого и девятого блоков формирования произведения; пятый информационный выход блока хранения констант соединен с первым информационным входом восьмого блока формирования произведения; шестой информационный выход блока хранения констант соединен с первым информационным входом второго блока формирования разности; седьмой информационный выход блока хранения констант соединен с первыми информационными входами первого, второго, третьего, четвертого блоков формирования функций
,
,  ,
,  соответственно; восьмой информационный выход блока хранения констант соединен со вторыми информационными входами первого, второго, третьего, четвертого блоков формирования функций
,
,
,
соответственно; девятый информационный выход блока хранения констант соединен с третьими информационными входами первого, второго, третьего, четвертого блоков формирования функций
,
,
,
соответственно; информационный выход первого блока формирования произведения соединен с первым информационным входом второго блока формирования произведения; информационный выход блока транспонирования соединен со вторым информационным входом четвертого блока формирования произведения; информационный выход четвертого блока формирования произведения соединен со вторым информационным входом третьего блока формирования произведения и первым информационным входом пятого блока формирования произведения; информационный выход третьего блока формирования произведения соединен со вторым информационным входом второго блока формирования произведения; информационный выход второго блока формирования произведения соединен со вторым информационным входом блока формирования суммы, информационный выход которого соединен с информационным входом первого блока интегрирования; информационный выход первого блока формирования функции
соединен со вторыми информационными входами пятого и восьмого блоков формирования произведения; информационный выход восьмого блока формирования произведения соединен с первым информационным входом девятого блока формирования произведения, информационный выход которого соединен с первым информационным входом десятого блока формирования произведения; информационный выход второго блока формирования функции
соединен с первым информационным входом первого блока формирования разности; информационный выход третьего блока формирования функции
соединен со вторым информационным входом второго блока формирования разности, информационный выход которого соединен со вторыми информационными входами седьмого и десятого блоков формирования произведения; информационный выход седьмого блока формирования произведения соединен с информационным входом второго блока интегрирования; информационный выход десятого блока формирования произведения соединен со вторым информационным входом первого блока формирования разности, информационный выход которого соединен с информационным входом третьего блока интегрирования; информационный выход четвертого блока формирования функции
соединен с информационным входом четвертого блока интегрирования; информационный выход первого блока интегрирования соединен со вторым информационным входом первого блока формирования произведения и первым информационным входом четвертого блока формирования произведения; информационный выход второго блока интегрирования является выходом устройства, с него же снимается искомое значение неизвестного приведенного управляющего момента и соединен со вторыми информационными входами первого, второго, третьего, четвертого блоков формирования функций
,
,
,
соответственно; информационный выход третьего блока интегрирования является выходом устройства, с него же снимается значение вектора состояния и соединен с третьими информационными входами первого, второго, третьего, четвертого блоков формирования функций
,
,
,
соответственно; информационный выход четвертого блока интегрирования соединен с первым информационным входом первого блока формирования произведения и информационным входом блока транспонирования.
соответственно; восьмой информационный выход блока хранения констант соединен со вторыми информационными входами первого, второго, третьего, четвертого блоков формирования функций
,
,
,
соответственно; девятый информационный выход блока хранения констант соединен с третьими информационными входами первого, второго, третьего, четвертого блоков формирования функций
,
,
,
соответственно; информационный выход первого блока формирования произведения соединен с первым информационным входом второго блока формирования произведения; информационный выход блока транспонирования соединен со вторым информационным входом четвертого блока формирования произведения; информационный выход четвертого блока формирования произведения соединен со вторым информационным входом третьего блока формирования произведения и первым информационным входом пятого блока формирования произведения; информационный выход третьего блока формирования произведения соединен со вторым информационным входом второго блока формирования произведения; информационный выход второго блока формирования произведения соединен со вторым информационным входом блока формирования суммы, информационный выход которого соединен с информационным входом первого блока интегрирования; информационный выход первого блока формирования функции
соединен со вторыми информационными входами пятого и восьмого блоков формирования произведения; информационный выход восьмого блока формирования произведения соединен с первым информационным входом девятого блока формирования произведения, информационный выход которого соединен с первым информационным входом десятого блока формирования произведения; информационный выход второго блока формирования функции
соединен с первым информационным входом первого блока формирования разности; информационный выход третьего блока формирования функции
соединен со вторым информационным входом второго блока формирования разности, информационный выход которого соединен со вторыми информационными входами седьмого и десятого блоков формирования произведения; информационный выход седьмого блока формирования произведения соединен с информационным входом второго блока интегрирования; информационный выход десятого блока формирования произведения соединен со вторым информационным входом первого блока формирования разности, информационный выход которого соединен с информационным входом третьего блока интегрирования; информационный выход четвертого блока формирования функции
соединен с информационным входом четвертого блока интегрирования; информационный выход первого блока интегрирования соединен со вторым информационным входом первого блока формирования произведения и первым информационным входом четвертого блока формирования произведения; информационный выход второго блока интегрирования является выходом устройства, с него же снимается искомое значение неизвестного приведенного управляющего момента и соединен со вторыми информационными входами первого, второго, третьего, четвертого блоков формирования функций
,
,
,
соответственно; информационный выход третьего блока интегрирования является выходом устройства, с него же снимается значение вектора состояния и соединен с третьими информационными входами первого, второго, третьего, четвертого блоков формирования функций
,
,
,
соответственно; информационный выход четвертого блока интегрирования соединен с первым информационным входом первого блока формирования произведения и информационным входом блока транспонирования.
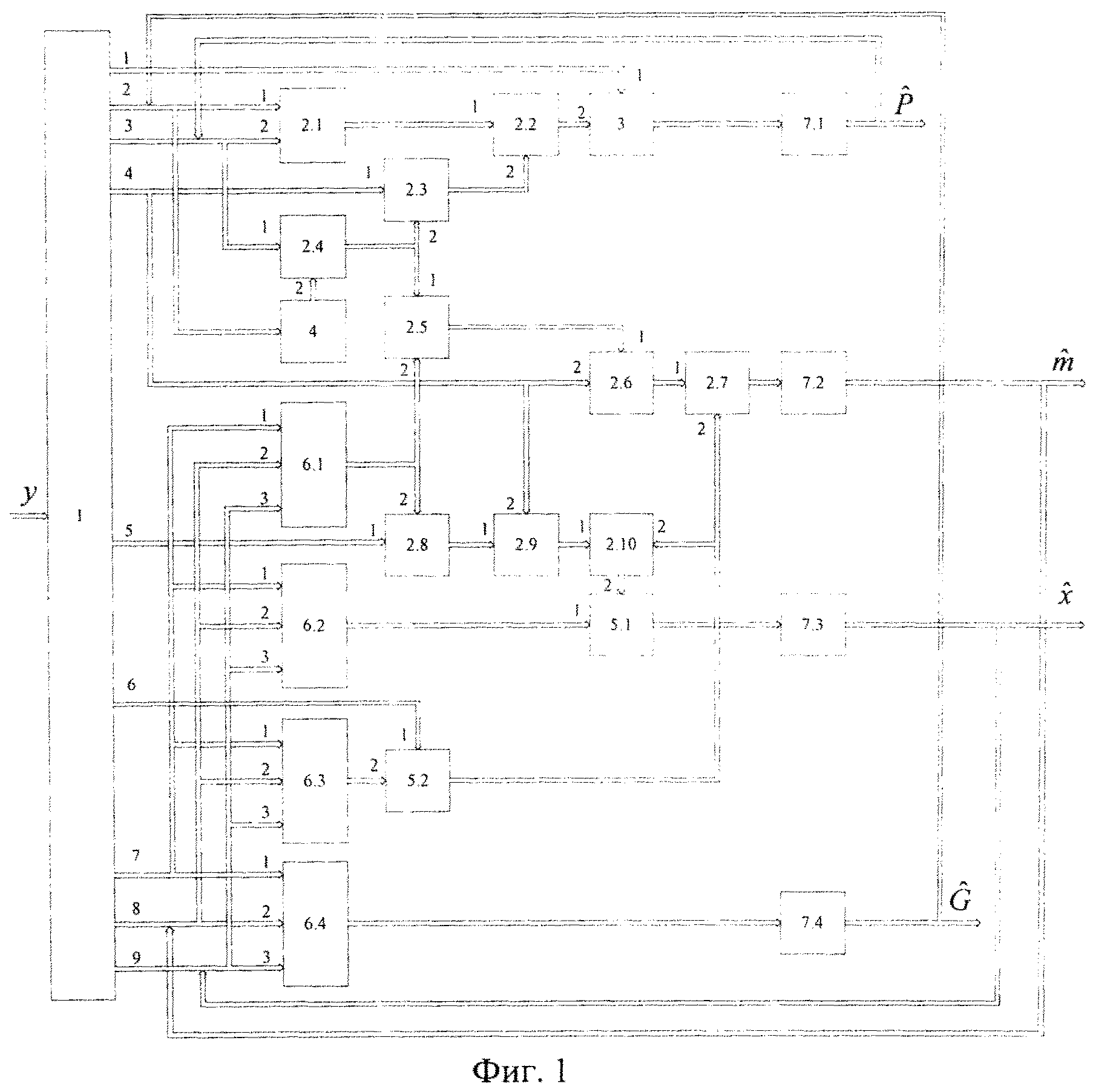
Сущность изобретения поясняется фиг.1, где представлено устройство определения технического состояния типовых бортовых систем летательного аппарата, которое содержит:
1 - блок хранения констант;
2.1 - первый блок формирования произведения;
2.2 - второй блок формирования произведения;
2.3 - третий блок формирования произведения;
2.4 - четвертый блок формирования произведения;
2.5 - пятый блок формирования произведения;
2.6 - шестой блок формирования произведения;
2.7 - седьмой блок формирования произведения;
2.8 - восьмой блок формирования произведения;
2.9 - девятый блок формирования произведения;
2.10 - десятый блок формирования произведения;
3 - блок формирования суммы;
4 - блок транспонирования;
5.1 - первый блок формирования разности;
5.2 - второй блок формирования разности;
6.1 - первый блок формирования функции
;
6.2 - второй блок формирования функции
;
6.3 - третий блок формирования функции
;
6.4 - первый блок формирования функции
;
7.1 - первый блок интегрирования;
7.2 - второй блок интегрирования;
7.3 - третий блок интегрирования;
7.4 - четвертый блок интегрирования.
Устройство определения технического состояния типовых бортовых систем летательного аппарата работает следующим образом: на информационный вход блока 1 хранения констант поступает значение наблюдаемой величины; первый информационный выход блока 1 хранения констант соединен с первым информационным входом блока 3 формирования суммы; второй и третий информационные выходы блока 1 хранения констант соединены соответственно с первым и вторым информационными входами первого блока 2.1 формирования произведения; второй информационный выход блока 1 хранения констант соединен с информационным входом блока 4 транспонирования; третий информационный выход блока 1 хранения констант соединен с первым информационным входом четвертого блока 2.4 формирования произведения; четвертый информационный выход блока 1 хранения констант соединен с первым информационным входом третьего блока 2.3 формирования произведения; четвертый информационный выход блока 1 хранения констант соединен со вторыми информационными входами шестого блока 2.6 и девятого блока 2.9 формирования произведения; пятый информационный выход блока 1 хранения констант соединен с первым информационным входом восьмого блока 2.8 формирования произведения; шестой информационный выход блока 1 хранения констант соединен с первым информационным входом второго блока 5.2 формирования разности; седьмой информационный выход блока 1 хранения констант соединен с первыми информационными входами первого блока 6.1, второго блока 6.2, третьего блока 6.3 и четвертого блока 6.4 формирования функций
,
,
,
соответственно; восьмой информационный выход блока 1 хранения констант соединен со вторыми информационными входами первого блока 6.1, второго блока 6.2, третьего блока 6.3 и четвертого блока 6.4 формирования функций
,
,
,
соответственно; девятый информационный выход блока 1 хранения констант соединен с третьими информационными входами первого блока 6.1, второго блока 6.2, третьего блока 6.3 и четвертого блока 6.4 формирования функций
,
,
,
соответственно; информационный выход первого блока 2.1 формирования произведения соединен с первым информационным входом второго блока 2.2 формирования произведения; информационный выход четвертого блока 2.4 формирования произведения соединен со вторым информационным входом третьего блока 2.3 формирования произведения и первым информационным входом пятого блока 2.5 формирования произведения; информационный выход третьего блока 2.3 формирования произведения соединен со вторым информационным входом второго блока 2.2 формирования произведения; информационный выход второго блока 2.2 формирования произведения соединен со вторым информационным входом блока 3 формирования суммы; информационный выход первого блока 6.1 формирования функции
соединен со вторыми информационными входами пятого блока 2.5 и восьмого блока 2.8 формирования произведения; информационный выход пятого блока 2.5 формирования произведения соединен с первым информационным входом шестого блока 2.6 формирования произведения; информационный выход шестого блока 2.6 формирования произведения соединен с первым информационным входом седьмого блока 2.7 формирования произведения; информационный выход восьмого блока 2.8 формирования произведения соединен с первым информационным входом девятого блока 2.9 формирования произведения; информационный выход девятого блока 2.9 формирования произведения соединен с первым информационным входом десятого блока 2.10 формирования произведения; информационный выход второго блока 6.2 формирования функции
соединен с первым информационным входом первого блока 5.1 формирования разности; информационный выход третьего блока 6.3 формирования функции
соединен со вторым информационным входом второго блока 5.2 формирования разности; информационный выход второго блока 5.2 формирования разности соединен со вторыми информационными входами седьмого блока 2.7 и десятого блока 2.10 формирования произведения; информационный выход десятого блока 2.10 формирования произведения соединен со вторым информационным входом первого блока 5.1 формирования разности; информационный выход блока 3 формирования суммы соединен с информационным входом первого блока 7.1 интегрирования; информационный выход седьмого блока 2.7 формирования произведения соединен с информационным входом второго блока 7.2 интегрирования; информационный выход первого блока 5.1 формирования разности соединен с информационным входом третьего блока 7.3 интегрирования; информационный выход четвертого блока 6.4 формирования функции
соединен с информационным входом четвертого блока 7.4 интегрирования; информационный выход первого блока 7.1 интегрирования соединен со вторым информационным входом первого блока 2.1 формирования произведения и первым информационным входом четвертого блока 2.4 формирования произведения; информационный выход второго блока 7.2 интегрирования соединен со вторыми информационными входами первого блока 6.1, второго блока 6.2, третьего блока 6.3 и четвертого блока 6.4 формирования функций
,
,
,
соответственно; информационный выход третьего блока 7.3 интегрирования соединен с третьими информационными входами первого блока 6.1, второго блока 6.2, третьего блока 6.3 и четвертого блока 6.4 формирования функций
,
,
,
соответственно; информационный выход четвертого блока 7.4 интегрирования соединен с первым информационным входом первого блока 2.1 формирования произведения и информационным входом блока 4 транспонирования.
Заявленное изобретение направлено на повышение эффективности определения технического состояния бортовых систем летательных аппаратов, что также весьма важно на всех этапах создания, экспериментальной обработки и эксплуатации объектов ракетно-космической, авиационной, корабельной и других видов техники.
Приведенные результаты позволяют утверждать, что определение технического состояния по результатам идентификации параметров бортовых систем летательных аппаратов с использованием вариационных принципов и итерационной регуляризации обеспечивает увеличение эффективности диагностики бортовых систем в сравнении с известным фильтром Калмана.
Структура предлагаемого устройства определяется решением задачи определения технического состояния системы ориентации и стабилизации летательных аппаратов.
Модель системы ориентации и стабилизации представим в виде дифференциального уравнения

ω(0)=30,  ,
,
применив следующие обозначения x0=ω,  , получим
, получим

где U - функция управления,
m=(Mупр+Mвозм)/I - приведенный управляющий момент, [град/с2],
Mупр - управляющий момент,
Mвозм - возмущающий момент,
I - момент инерции.
В идеальном случае, когда внешние возмущения отсутствуют, (Mвозм=0), m=Mупр/I.
Приведенный управляющий момент позволяет осуществить обратную связь в системе ориентации и стабилизации, т.к. его значение зависит от отклонения текущего состояния системы g(t) от некоторого заданного состояния g(t)=(φ(t), ω(t)). Значение m выбирается на основании информации о текущем состоянии летательного аппарата. При этом источниками информации являются чувствительные элементы: датчики углов и датчики угловых скоростей с соответствующими уравнениями измерений

где kφ, kω - передаточные коэффициенты,
ψ, υ - соответствующие погрешности измерений.
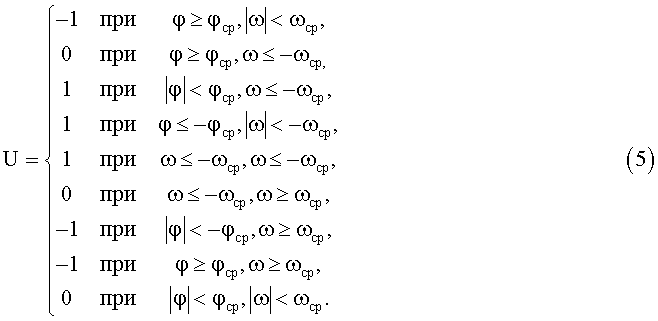
Функция управления U имеет вид

где yср - векторный порог срабатывания управляющих элементов;
некоторое фиксированное значение наблюдаемого векторного параметра,
y - текущее значение наблюдаемого векторного параметра.
При kφ, kω=1 обобщенная функция управления имеет следующий вид
Модель неизвестного неслучайного параметра

Критерий качества идентификации имеет вид

Таким образом, модель системы ориентации и стабилизации летательного аппарата при вращении вокруг одной из осей может быть задана следующим образом: вращение летательного аппарата вокруг центра масс описывается уравнением (2) с функцией управления вида (5) и уравнениями измерений датчиков углов и датчиков угловой скорости вида (3).
Требуется провести идентификацию приведенного управляющего момента m=1.29, при условии что φср=-0.5 [град], а ωср=2,9 [град/с2].
Алгоритм идентификации на основе использования вариационных принципов и итерационной регуляризации [3, 4] имеет вид
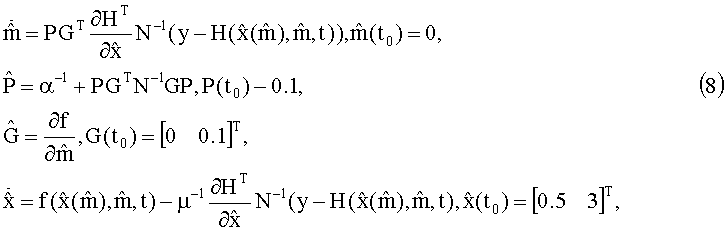
где µ-1=6.7, α-1=1.
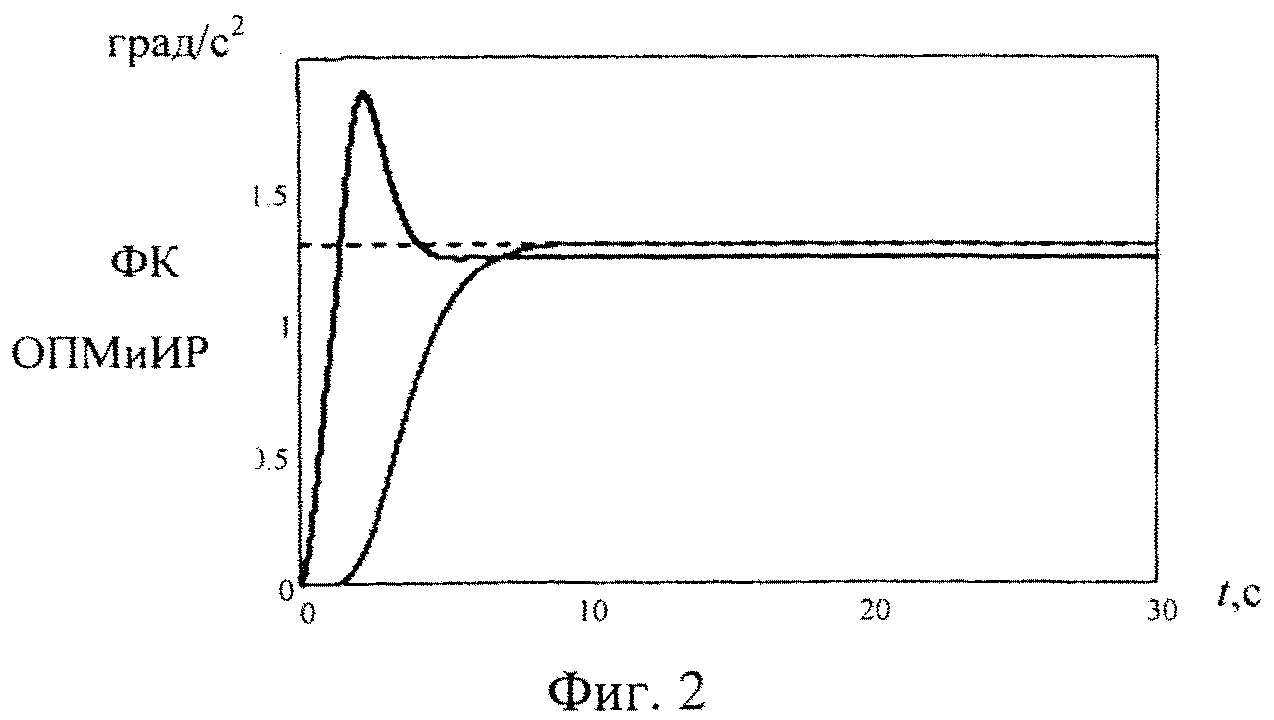
Результаты идентификации приведенного управляющего момента разработанным алгоритмом (8) и фильтром Калмана [5-7] представлены на фиг.2.
Относительная погрешность оценок составляет соответственно δОПМиИР=0,067%, δФК=0,603% в установившемся режиме. Анализ полученных данных позволяет сделать вывод, что фильтр Калмана уступает разработанному алгоритму по точности оцениваемого параметра.
Следовательно, в качестве алгоритма идентификации для определения технического состояния системы ориентации и стабилизации используем разработанный алгоритм (8).
Однако, помимо процедуры идентификации, процесс определения технического состояния предполагает проведение целого ряда этапов: таких как получение телеметрической информации с борта летательного аппарата, предварительную и первичную обработку телеизмерений, принятие решения о техническом состоянии. Поэтому рассмотрим пример решения задачи определения технического состояния бортовой системы летательного аппарата на примере типовой активной системы ориентации и стабилизации летательного аппарата [1, 8]. В соответствии со структурой процесса технического состояния примем, что априорно задано:
1. Множество классов технических состояний
Пусть на основании анализа функционирования системы ориентации и стабилизации летательного аппарата заданы следующие виды технического состояния {Aj}, j=0, 1, 2;
A0 - система ориентации и стабилизации работоспособна;
A1 - система ориентации и стабилизации неработоспособна вследствие изменения тяги двигателя ориентации и стабилизации;
A2 - система ориентации и стабилизации неработоспособна вследствие выхода из строя датчика угловых скоростей.
2. Вектор диагностических признаков Q
На основании выбранной модели система ориентации и стабилизации определен вектор диагностических признаков, обеспечивающий наблюдаемость технических состояний Q=[m, kω]. При этом неизвестный параметр m рассчитывается в соответствии с алгоритмом (8), а передаточный коэффициент kω определяется по результатам расчетных и телеметрических измерений.
3. Модель системы диагностирования R
Модель системы диагностирования задается в виде матрицы соответствия R между техническими состояниями Aj и вектором диагностических признаков Q, т.е. отображения R:A→Q
|
4. Модель информационно-телеметрической системы
Модель информационно-телеметрической системы представляет собой оператор преобразования L:{g}→{λ}, где g - вектор состояния, λ - вектор телеметрируемых параметров. Для система ориентации и стабилизации оператор L по аналогии с уравнениями (2) можно представить системой уравнений:

или в векторно-матричной форме

или в общем виде

где  - матрица наблюдений,
- матрица наблюдений,
 - вектор погрешностей измерений.
- вектор погрешностей измерений.
5. Модель системы предварительной и первичной обработки результатов телеизмерений
Модель системы предварительной и первичной обработки представляет собой оператор преобразования G:{λ}→{x∗}, где x∗ - оценка вектора состояния, реализованного набором алгоритмов предварительной и первичной обработки {Gr}, r=1…N. Для системы ориентации и стабилизации летательного аппарата

6. Модель системы вторичной обработки результатов телеизмерений
Модель системы вторичной обработки результатов телеизмерений представляет собой оператор преобразования Id:{x∗}→{Q∗}, где Q∗ - оценка вектора диагностических признаков, реализованного алгоритмом вторичной обработки (в условиях постановки данной задачи алгоритмом многопараметрической идентификации на основе объединенного принципа максимума и итерационной регуляризации): Idp, p=1…M.
7. Показатель эффективности решения задачи идентификации
В качестве показателя эффективности решения задачи принята норма разности реализации вектора диагностических признаков Q∗, оцененного в результате вторичной обработки, с априорно заданными значениями Qj соответствующими различным видам технических состояний Aj:
 .
.
8. Критерий эффективности решения задачи идентификации
В качестве критерия эффективности выберем требование обеспечения минимума выбранного показателя
J1→min.
Таким образом, задача оценивания технического состояния системы ориентации и стабилизации формулируется следующим образом:
Дано:
1. Класс моделей системы в виде векторных дифференциальных уравнений (2).
2. Модель наблюдения (3).
3. Модель управления (5).
4. Модель динамики идентифицируемого параметра (6).
5. Критерий оценивания (7).
Требуется: На основании заданной априорной информации по результатам проведенных телеизмерений оценить приведенный управляющий момент m с требуемой точностью и определить вид технического состояния системы ориентации и стабилизации летательного аппарата в соответствии с выбранным критерием.
9. Практические рекомендации по принятию решения о техническом состоянии системы ориентации и стабилизации
Целью функционирования подсистемы принятия решений является обеспечение высокой достоверности принятия решения о техническом состоянии системы ориентации и стабилизации летательного аппарата. На практике принятие решения осуществляется в условиях, когда действуют факторы различной природы (случайные, неопределенные), когда возможны различные варианты, и требуется выбрать предпочтительный. Существует несколько вариантов решений: метрический, вероятностный и возможный. В условиях наглядной демонстрации преимуществ разработанного метода рассматривается только метрический вариант решения, заключающийся в последовательном уточнении оцениваемых параметров системы ориентации и стабилизации на каждой итерации до момента, когда точность и вероятность принятия решения о техническом состоянии системы ориентации и стабилизации будет однозначной.
Устройство работает следующим образом. В исходном состоянии на вход устройства подается y, а в блоке 1 хранения констант записываются начальные значения α-1, G, P, N-1, µ-1, y, t,  ,
,  . Значение α-1 с первого информационного выхода блока 1 хранения констант поступает на первый информационный вход блока 3 формирования суммы. Значение G со второго информационного выхода блока 1 хранения констант поступает на первый информационный вход первого блока 2.1 формирования произведения и на информационный вход блока 4 транспонирования. Значение P с третьего информационного выхода блока 1 хранения констант поступает на второй информационный вход первого блока 2.1 формирования произведения и первый информационный вход четвертого блока 2.4 формирования произведения. Значение N-1 с четвертого информационного выхода блока 1 хранения констант поступает на первый информационный вход третьего блока 2.3 формирования произведения и на вторые информационные входы шестого блока 2.6 и девятого блока 2.9 формирования произведения. Значение µ-1 с пятого информационного выхода блока 1 хранения констант поступает на первый информационный вход восьмого блока 2.8 формирования произведения. Значение y с шестого информационного выхода блока 1 хранения констант поступает на первый информационный вход второго блока 5.2 формирования разности. Значение t с седьмого информационного выхода блока 1 хранения констант поступает на первые информационные входы первого блока 6.1, второго блока 6.2, третьего блока 6.3, четвертого блока 6.4 формирования функций
,
,
,
соответственно. Значение
. Значение α-1 с первого информационного выхода блока 1 хранения констант поступает на первый информационный вход блока 3 формирования суммы. Значение G со второго информационного выхода блока 1 хранения констант поступает на первый информационный вход первого блока 2.1 формирования произведения и на информационный вход блока 4 транспонирования. Значение P с третьего информационного выхода блока 1 хранения констант поступает на второй информационный вход первого блока 2.1 формирования произведения и первый информационный вход четвертого блока 2.4 формирования произведения. Значение N-1 с четвертого информационного выхода блока 1 хранения констант поступает на первый информационный вход третьего блока 2.3 формирования произведения и на вторые информационные входы шестого блока 2.6 и девятого блока 2.9 формирования произведения. Значение µ-1 с пятого информационного выхода блока 1 хранения констант поступает на первый информационный вход восьмого блока 2.8 формирования произведения. Значение y с шестого информационного выхода блока 1 хранения констант поступает на первый информационный вход второго блока 5.2 формирования разности. Значение t с седьмого информационного выхода блока 1 хранения констант поступает на первые информационные входы первого блока 6.1, второго блока 6.2, третьего блока 6.3, четвертого блока 6.4 формирования функций
,
,
,
соответственно. Значение  с восьмого информационного выхода блока 1 хранения констант поступает на вторые информационные входы первого блока 6.1, второго блока 6.2, третьего блока 6.3, четвертого блока 6.4 формирования функций
,
,
,
соответственно. Значение
с восьмого информационного выхода блока 1 хранения констант поступает на вторые информационные входы первого блока 6.1, второго блока 6.2, третьего блока 6.3, четвертого блока 6.4 формирования функций
,
,
,
соответственно. Значение  с девятого информационного выхода блока 1 хранения констант поступает на третьи информационные входы первого блока 6.1, второго блока 6.2, третьего блока 6.3, четвертого блока 6.4 формирования функций
,
,
,
соответственно. Значение GP с информационного выхода первого блока 2.1 формирования произведения поступает на первый информационный вход второго блока 2.2 формирования произведения. Значение GT с информационного выхода блока 4 транспонирования поступает на второй информационный вход четвертого блока 2.4 формирования произведения, с информационного выхода которого значение PGT поступает на второй информационный вход третьего блока 2.3 формирования произведения и первый информационный вход пятого блока 2.5 формирования произведения. Значение PGTN-1 с информационного выхода третьего блока 2.3 формирования произведения поступает на второй информационный вход второго блока 2.2 формирования произведения, с информационного выхода которого значение PGTN-1GP поступает на второй информационный вход блока 3 формирования суммы. Значение α-1+PGTN-1GP с информационного выхода блока 3 формирования суммы поступает на информационный вход первого блока 7.1 интегрирования. Значение
с информационного выхода первого блока 6.1 формирования функции
поступает на вторые информационные входы пятого блока 2.5 и восьмого блока 2.8 формирования произведения. Значение
с девятого информационного выхода блока 1 хранения констант поступает на третьи информационные входы первого блока 6.1, второго блока 6.2, третьего блока 6.3, четвертого блока 6.4 формирования функций
,
,
,
соответственно. Значение GP с информационного выхода первого блока 2.1 формирования произведения поступает на первый информационный вход второго блока 2.2 формирования произведения. Значение GT с информационного выхода блока 4 транспонирования поступает на второй информационный вход четвертого блока 2.4 формирования произведения, с информационного выхода которого значение PGT поступает на второй информационный вход третьего блока 2.3 формирования произведения и первый информационный вход пятого блока 2.5 формирования произведения. Значение PGTN-1 с информационного выхода третьего блока 2.3 формирования произведения поступает на второй информационный вход второго блока 2.2 формирования произведения, с информационного выхода которого значение PGTN-1GP поступает на второй информационный вход блока 3 формирования суммы. Значение α-1+PGTN-1GP с информационного выхода блока 3 формирования суммы поступает на информационный вход первого блока 7.1 интегрирования. Значение
с информационного выхода первого блока 6.1 формирования функции
поступает на вторые информационные входы пятого блока 2.5 и восьмого блока 2.8 формирования произведения. Значение  с информационного выхода пятого блока 2.5 формирования произведения поступает на первый информационный вход шестого блока 2.6 формирования произведения, с информационного выхода которого значение
с информационного выхода пятого блока 2.5 формирования произведения поступает на первый информационный вход шестого блока 2.6 формирования произведения, с информационного выхода которого значение  поступает на первый информационный вход седьмого блока 2.7 формирования произведения. Значение
поступает на первый информационный вход седьмого блока 2.7 формирования произведения. Значение  с информационного выхода восьмого блока 2.8 формирования произведения поступает на первый информационный вход девятого блока 2.9 формирования произведения, с информационного выхода которого значение
с информационного выхода восьмого блока 2.8 формирования произведения поступает на первый информационный вход девятого блока 2.9 формирования произведения, с информационного выхода которого значение  поступает на первый информационный вход десятого блока 2.10 формирования произведения. Значение
с информационного выхода второго блока 6.2 формирования функции
поступает на первый информационный вход первого блока 5.1 формирования разности. Значение
с информационного выхода третьего блока 6.3 формирования функции
поступает на второй информационный вход второго блока 5.2 формирования разности, с информационного выхода которого значение y -
поступает на вторые информационные входы седьмого блока 2.7 и десятого блока 2.10 формирования произведения. Значение
поступает на первый информационный вход десятого блока 2.10 формирования произведения. Значение
с информационного выхода второго блока 6.2 формирования функции
поступает на первый информационный вход первого блока 5.1 формирования разности. Значение
с информационного выхода третьего блока 6.3 формирования функции
поступает на второй информационный вход второго блока 5.2 формирования разности, с информационного выхода которого значение y -
поступает на вторые информационные входы седьмого блока 2.7 и десятого блока 2.10 формирования произведения. Значение  с информационного выхода седьмого блока 2.7 формирования произведения поступает на информационный вход второго блока 7.2 интегрирования. Значение
с информационного выхода седьмого блока 2.7 формирования произведения поступает на информационный вход второго блока 7.2 интегрирования. Значение  с информационного выхода десятого блока 2.10 формирования произведения поступает на второй информационный вход первого блока 5.1 формирования разности, с информационного выхода которого значение
с информационного выхода десятого блока 2.10 формирования произведения поступает на второй информационный вход первого блока 5.1 формирования разности, с информационного выхода которого значение  поступает на информационный вход третьего блока 7.3 интегрирования. Значение
с информационного выхода четвертого блока 6.4 формирования функции
поступает на информационный вход четвертого блока 7.4 интегрирования. Значение
поступает на информационный вход третьего блока 7.3 интегрирования. Значение
с информационного выхода четвертого блока 6.4 формирования функции
поступает на информационный вход четвертого блока 7.4 интегрирования. Значение  с информационного выхода первого блока 7.1 интегрирования подается на второй информационный вход первого блока 2.1 формирования произведения и первый информационный вход четвертого блока 2.4 формирования произведения. Искомое значение неизвестного приведенного управляющего момента
с информационного выхода первого блока 7.1 интегрирования подается на второй информационный вход первого блока 2.1 формирования произведения и первый информационный вход четвертого блока 2.4 формирования произведения. Искомое значение неизвестного приведенного управляющего момента  с информационного выхода второго блока 7.2 интегрирования снимается и подается на вторые информационные входы первого блока 6.1, второго блока 6.2, третьего блока 6.3, четвертого блока 6.4 формирования функции
,
,
,
соответственно. Значение вектора состояния
с информационного выхода второго блока 7.2 интегрирования снимается и подается на вторые информационные входы первого блока 6.1, второго блока 6.2, третьего блока 6.3, четвертого блока 6.4 формирования функции
,
,
,
соответственно. Значение вектора состояния  с информационного выхода третьего блока 7.3 интегрирования снимается и подается на третьи информационные входы первого блока 6.1, второго блока 6.2, третьего блока 6.3, четвертого блока 6.4 формирования функции
,
,
,
соответственно. Значение
с информационного выхода третьего блока 7.3 интегрирования снимается и подается на третьи информационные входы первого блока 6.1, второго блока 6.2, третьего блока 6.3, четвертого блока 6.4 формирования функции
,
,
,
соответственно. Значение  с информационного выхода четвертого блока 7.4 интегрирования подается на первый информационный вход первого блока 2.1 формирования произведения и информационный выход блока 4 транспонирования.
с информационного выхода четвертого блока 7.4 интегрирования подается на первый информационный вход первого блока 2.1 формирования произведения и информационный выход блока 4 транспонирования.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. Мороз В.И., Ромашенко Е.К., Потюпкин А.Ю. Решение задач математической обработки результатов телеизмерений. МО РФ, М., 2001 г., 163 с.
2. Патент РФ рег. №2464615 от 20.10.2012 г. Устройство идентификации параметров динамических систем на основе вариационных принципов. Андрашитов Д.С., Костоглотов А.А., Кузнецов А.А., Лазаренко С.В., Сметанникова Н.А.
3. Андрашитов Д.С., Костоглотов А.А., Лазаренко С.В., Дерябкин И.В. Вариационный метод многопараметрической идентификации динамических систем на основе итерационной регуляризации // Успехи современной радиоэлектроники. №6, 2012, с.67-72.
4. Лурье А.И. Аналитическая механика. М.: Гос. изд. физ.-мат. лит., 1961, с.642-648.
5. Сейдж Э.П., Меле Д.Л. Идентификация систем управления. М.: Наука, 1974. с.204-212.
6. Справочник по теории автоматического управления / Под ред. А.А. Красовского. М.: Наука, 1987, с.347-360.
7. Тихонов А.Н., Арсенин В.Я. Методы решения некорректных задач. М.: Наука, 1986, с.15-18.
8. Фарина А., Студер Ф. Цифровая обработка радиолокационной информации. Сопровождение целей. - М.: Радио и связь, 1993, с.38-47.
Устройство определения технического состояния бортовых систем летательных аппаратов по результатам оценки параметров, содержащее блок хранения констант; первый, второй, третий, четвертый, пятый, шестой, седьмой, восьмой, девятый, десятый блоки формирования произведения; блок формирования суммы; блок транспонирования; первый, второй блоки формирования разности; первый, второй, третий, четвертый блоки формирования функций , , , соответственно; первый, второй, третий, четвертый блоки интегрирования; при этом информационный вход блока хранения констант является входом устройства, а информационный выход второго блока интегрирования является выходом устройства, отличающееся тем, что из устройства исключены второй блок хранения констант, третий блок формирования функции (1-γ), первый, второй, третий, четвертый и пятый блок формирования производной, одиннадцатый блок формирования произведения, третий блок формирования разности, второй и третий блок формирования суммы, второй блок транспонирования, пятый и шестой блоки интегрирования, в устройство включены первый блок формирования функции , второй блок формирования функции , третий блок формирования функции , четвертый блок формирования функции , при этом седьмой информационный выход блока хранения констант соединен с первыми информационными входами первого, второго, третьего, четвертого блоков формирования функций , , , соответственно, восьмой информационный выход блока хранения констант соединен со вторыми информационными входами первого, второго, третьего, четвертого блоков формирования функций , , , соответственно; девятый информационный выход блока хранения констант соединен с третьими информационными входами первого, второго, третьего, четвертого блоков формирования функций , , , соответственно, информационный выход первого блока формирования функции соединен со вторыми информационными входами пятого и восьмого блоков формирования произведения, информационный выход второго блока формирования функции соединен с первым информационным входом первого блока формирования разности, информационный выход третьего блока формирования функции соединен со вторым информационным входом второго блока формирования разности, информационный выход четвертого блока формирования функции соединен с информационным входом четвертого блока интегрирования.


Устройство для моделирования многоканальных преобразователей
Устройство для поиска и определения местоположения людей
Способ определения азимута платформы трехосного гиростабилизатора по углу поворота корпуса гироблока
Устройство для симметрирования напряжений кабеля
Устройство идентификации лагранжевых динамических систем на основе итерационной регуляризации
Устройство для моделирования двухканальных преобразователей
Передача с объемно-пространственным зацеплением-попз
Способ утилизации боеприпасов
Противокумулятивное и противопульное средство защиты
Топливо для гиперзвукового прямоточного воздушно-реактивного двигателя
Устройство для поиска и определения местоположения людей
Способ определения азимута платформы трехосного гиростабилизатора по углу поворота корпуса гироблока
Устройство для симметрирования напряжений кабеля
Устройство идентификации лагранжевых динамических систем на основе итерационной регуляризации
Устройство для моделирования двухканальных преобразователей
Передача с объемно-пространственным зацеплением-попз
Способ утилизации боеприпасов
Противокумулятивное и противопульное средство защиты
Топливо для гиперзвукового прямоточного воздушно-реактивного двигателя
Способ автономной азимутальной ориентации платформы трехосного гиростабилизатора на подвижном основании

