Результат интеллектуальной деятельности: Способ преобразования угла поворота вала в код
Вид РИД
Изобретение
Изобретение относится к области автоматики и вычислительной техники и может быть использовано для связи источников информации об угловом положении вала с ЭВМ в управляющих и информационных системах.
Известны способы преобразования угла поворота вала в код (авторские свидетельства №1181135, №1381711, №1786662, патент РФ №2235422), основанные на том, что вал датчиков угла (далее - датчиков) поворачивают в диапазоне преобразования, преобразуют угол поворота вала в сигналы, определяют амплитуды и фазы пространственных гармоник погрешности преобразования, формируют поправки и затем формируют выходной код угла. Недостатком этих способов является необходимость разворота вала на полный оборот, при ограничении угла поворота вала меньшим углом перечисленные способы не могут быть использованы.
Наиболее близким техническим решением, выбранным за прототип, является способ преобразования угла поворота вала в код по патенту РФ №2266614. Известный способ основан на том, что вал первого и второго датчиков поворачивают в пределах диапазона, не меньшего 360°(1/p1+1/p2), где p1 и p2 - числа периодов погрешности соответственно первого и второго датчика на обороте вала; преобразуют угол поворота вала в сигналы первого и второго датчиков с различными спектрами пространственной погрешности; выходные сигналы первого и второго датчиков преобразуют в первый и второй коды угла; определяют амплитуды и фазы пространственных гармоник погрешности первого и второго датчиков; формируют первую поправку как сумму пространственных гармоник погрешности первого датчика для угла, соответствующего первому коду угла; формируют выходной код, прибавляя первую поправку к первому коду угла, формируют вторую поправку как сумму пространственных гармоник погрешности второго датчика для угла, соответствующего второму коду угла; формируют второй выходной код, прибавляя вторую поправку к второму коду угла; формируют разность выходного и второго выходного кодов, по которой контролируют точность преобразования.
В известном способе определение амплитуд и фаз пространственных гармоник погрешности осуществляется при повороте вала датчиков в пределах диапазона, не меньшего 360°(1/p1+1/p2). Условием для реализации способа является преобразование сигналов датчиков в код в угловых положениях, равномерно распределенных в диапазоне угла поворота с заданным шагом, равным 360°/(p1⋅p2). Условие выполняется при использовании внешнего эталона угла, например, на углоизмерительном стенде. В технических системах возможность использования внешнего эталона часто ограничивается конструкцией системы, что не позволяет использовать известный способ для аттестации и компенсации погрешности преобразования.
Предлагаемое изобретение решает задачу совершенствования способов преобразования угла в код при ограниченном угле поворота.
Техническим результатом является повышение точности преобразования угла в код без использования внешнего эталона.
Для решения поставленной задачи в способе преобразования угла поворота вала в код, основанном на том, что вал первого и второго датчиков поворачивают в пределах диапазона, не меньшего 360°(1/p1+1/p2), где p1 и p2 - числа периодов погрешности соответственно первого и второго датчика на обороте вала, преобразуют угол поворота вала в сигналы первого и второго датчиков с различными спектрами пространственной погрешности, выходные сигналы первого и второго датчиков преобразуют в первый и второй коды угла, определяют амплитуды и фазы пространственных гармоник погрешности первого и второго датчиков, формируют первую поправку как сумму пространственных гармоник погрешности первого датчика для угла, соответствующего первому коду угла, формируют выходной код, прибавляя первую поправку к первому коду угла, формируют вторую поправку как сумму пространственных гармоник погрешности второго датчика для угла, соответствующего второму коду угла, формируют второй выходной код, прибавляя вторую поправку к второму коду угла, формируют разность выходного и второго выходного кодов, по которой контролируют точность преобразования. При этом согласно предлагаемому изобретению:
- вал датчиков устанавливают с шагом 360°/(p1⋅p2) в расчетные положения по значениям второго кода угла, далее в этих положениях фиксируют значения первого кода угла, находят приращения первого кода угла при повороте на p2 шагов;
- определяют амплитуды  и фазы
и фазы  i-x пространственных гармоник погрешности первого датчика, умножая амплитуды спектральных составляющих приращений первого кода угла при повороте на p2 шагов на
i-x пространственных гармоник погрешности первого датчика, умножая амплитуды спектральных составляющих приращений первого кода угла при повороте на p2 шагов на  и сдвигая их фазу на угол
и сдвигая их фазу на угол  ;
;
- находят приращения первого кода угла при повороте вала на p1 шагов, а амплитуды  и фазы
и фазы  j-x пространственных гармоник погрешности второго датчика определяют, умножая амплитуды спектральных составляющих приращений первого кода угла при повороте на p1 шагов на
j-x пространственных гармоник погрешности второго датчика определяют, умножая амплитуды спектральных составляющих приращений первого кода угла при повороте на p1 шагов на  и сдвигая их фазы на угол
и сдвигая их фазы на угол  , где i и j - номера пространственных гармоник погрешности первого и второго датчиков угла.
, где i и j - номера пространственных гармоник погрешности первого и второго датчиков угла.
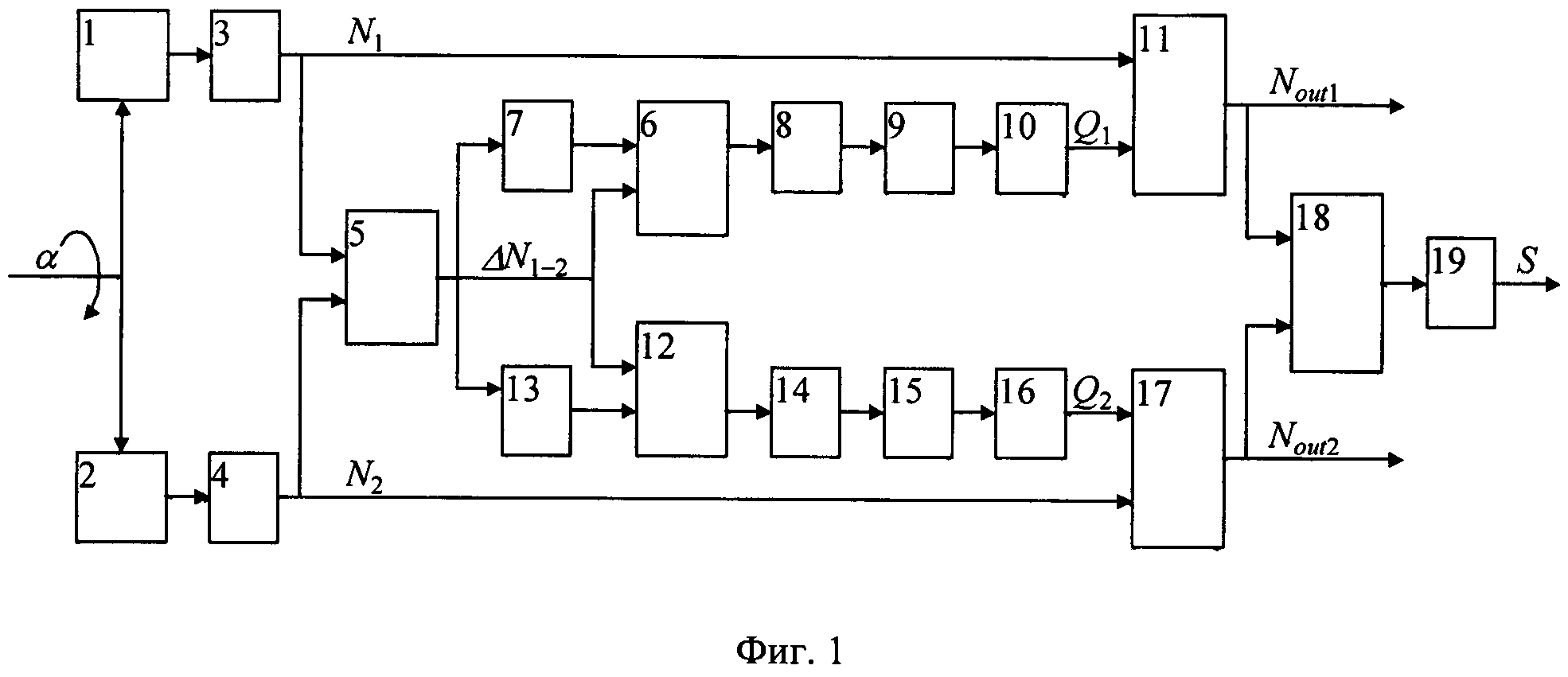
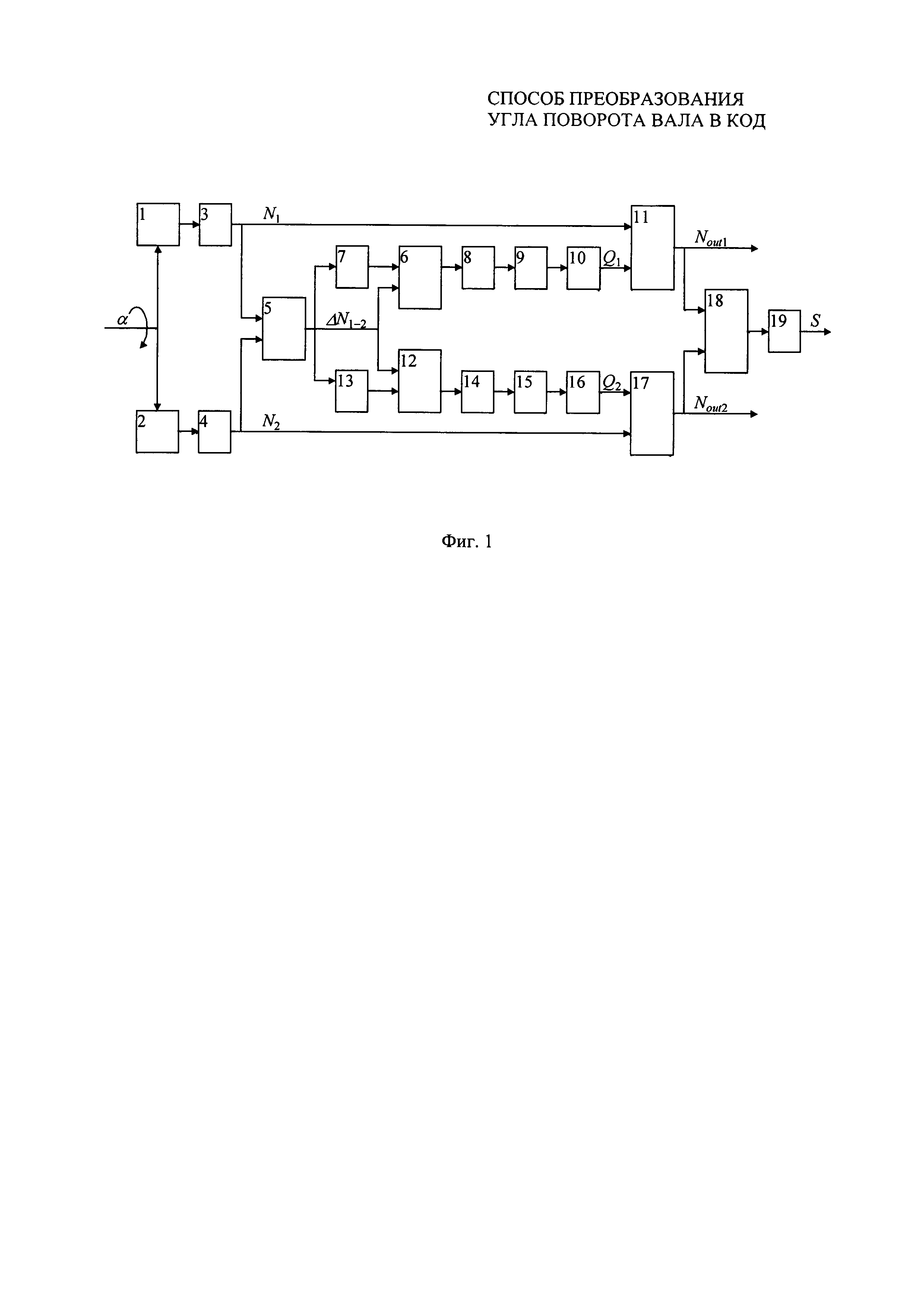
Блок-схема устройства, реализующего предлагаемый способ преобразования угла поворота вала в код, приведена на фиг. 1, где приняты следующие обозначения:
1, 2 - датчики с различными спектрами пространственных погрешностей (далее - датчики),
3, 4 - преобразователи сигналов датчиков в код угла (далее - преобразователи),
5 - блок формирования массива (значений) кодов,
6, 12, 18 - блоки вычитания кодов,
7, 13 - блоки сдвига кодов,
8, 14 - анализаторы спектра,
9, 15 - блоки коррекции,
10, 16 - блоки синтеза поправки,
11, 17 - сумматоры,
19 - компаратор.
Способ преобразования угла поворота вала состоит из следующих действий:
- преобразуют угол поворота вала в сигналы первого и второго датчиков с различными спектрами пространственной погрешности;
- выходные сигналы первого и второго датчиков преобразуют в первый и второй коды угла;
- перед началом преобразования вал первого и второго датчиков поворачивают в диапазоне, не меньшем 360°(1/p1+1/p2));
- вал датчиков устанавливают с шагом 360°/(p1⋅p2) в расчетные положения по значениям второго кода угла, в этих положениях фиксируют значения первого кода угла;
- находят приращения первого кода угла при повороте вала на p2 шагов;
- проводят спектральный анализ совокупности приращений первого кода угла при повороте вала на p2 шагов, полученной в диапазоне, не меньшем 360°(1/p1+1/p2);
- определяют амплитуды  и фазы
и фазы  i-x пространственных гармоник погрешности первого датчика, умножая амплитуды спектральных составляющих приращений первого кода угла при повороте вала на р2 шагов на
i-x пространственных гармоник погрешности первого датчика, умножая амплитуды спектральных составляющих приращений первого кода угла при повороте вала на р2 шагов на  и сдвигая их фазу на угол
и сдвигая их фазу на угол  ;
;
- в процессе преобразования угла поворота вала в код формируют первую поправку как сумму пространственных гармоник погрешности первого датчика для угла, соответствующего первому коду угла, и формируют выходной код, прибавляя первую поправку к первому коду угла.
Для контроля точности преобразования угла в код дополнительно выполняют следующие действия:
- находят приращения первого кода угла при повороте вала на p1 шагов;
- проводят спектральный анализ совокупности приращений первого кода угла при повороте вала на p1 шагов, полученной в диапазоне, не меньшем 360°(1/p1+1/p2);
- определяют амплитуды и фазы j-x пространственных гармоник погрешности второго датчика, умножая амплитуды спектральных составляющих приращений первого кода угла при повороте вала на p1 шагов на  и сдвигая их фазы на угол
и сдвигая их фазы на угол  ;
;
- в процессе преобразования угла поворота вала в код формируют вторую поправку как сумму пространственных гармоник погрешности второго датчика для угла, соответствующего второму коду угла, формируют второй выходной код, прибавляя вторую поправку к второму коду угла;
- формируют разность выходного и второго выходных кодов, по которой контролируют точность преобразования.
Устройство работает следующим образом.
Датчики 1 и 2 преобразуют угол α поворота вала в электрические сигналы, а преобразователи 3 и 4 преобразуют эти сигналы в первый N1 и второй N2 коды угла соответственно. Коды угла N1 и N2 формируются с некоторыми погрешностями Δ1 и Δ2 соответственно:
 ;
;
 .
.
В устройстве комплексируются датчики 1 и 2 с различными спектрами пространственных погрешностей так, чтобы при всех i=1,2,…,а и j=1,2,…,b выполнялось неравенство i⋅p1≠j⋅p2.
Перед началом преобразования поворачивают вал в пределах диапазона, не меньшего 360°(1/p1+1/p2), устанавливая с шагом 360°/(p1⋅p2) в расчетные положения по значениям второго кода угла N2, в этих положениях фиксируют значения первого кода угла N1.
При установке вала датчиков в k-е расчетное положение, в котором второй код угла N2 равен k⋅360°/(p1⋅p2), истинное угловое положение вала датчиков отличается от расчетного на угол, соответствующий погрешности второго датчика угла, при этом и значение первого кода угла также смещается на величину погрешности второго датчика угла. В результате значения первого кода угла N1, фиксируемые в задаваемых положениях, содержат погрешности как первого, так и второго датчиков угла.
В блоке 5 из этих значений формируется массив значений MN1.
Массив значений MN1 подается в блок 6 вычитания кодов непосредственно и через блок 7 сдвига кодов, где массив значений MN1 сдвигается на p2 позиций. В блоке 6 в результате вычитания поступающих кодов формируется массив первых приращений первого кода угла N1 при повороте вала на p2 шагов.
Массив приращений первого кода угла при повороте вала на р2 шагов поступает в анализатор 8 спектра, который производит спектральный анализ массива и определяет амплитуды и фазы его спектральных составляющих. В блоке 9 коррекции определяют амплитуды и фазы i-x пространственных гармоник погрешности первого датчика, умножая амплитуды спектральных составляющих приращений первого кода угла N1 при повороте вала на p2 шагов на  и сдвигая их фазу на угол
и сдвигая их фазу на угол  .
.
Амплитуды и фазы гармоник с номерами i⋅p1 при всех i=1,2,…,а запоминаются в памяти блока 10.
В процессе преобразования первый код угла N1 из преобразователя 3 поступает в блок 10, в котором формируется поправка Q1:
 .
.
В сумматоре 11 поправка Q1 добавляется к первому коду угла N1, поступающему из преобразователя 3, и на выходе формируется выходной код угла Nout1:
 .
.
При малых значениях погрешности Δ1, таких, что обеспечивается условие  , поправка
, поправка  и выходной код угла равен
и выходной код угла равен  , т.е. погрешность в выходном коде скомпенсирована с точностью до величины
, т.е. погрешность в выходном коде скомпенсирована с точностью до величины  второго порядка малости, обусловленной вычислительными погрешностями и точностью выполнения условия
второго порядка малости, обусловленной вычислительными погрешностями и точностью выполнения условия  .
.
Для обеспечения контроля точности преобразования массив значений MN1, первого кода угла N1 подается также в блок 12 вычитания кодов непосредственно и через блок 13 сдвига кодов, где массив значений MN1 сдвигается на p1 позиций. В блоке 12 в результате вычитания поступающих кодов формируется массив приращений первого кода угла N1 при повороте вала на p1 шагов.
Массив вторых приращений поступает в анализатор 14 спектра, который производит спектральный анализ массива и определяет амплитуды и фазы его спектральных составляющих. В блоке 15 коррекции определяют амплитуды и фазы j-x пространственных гармоник погрешности второго датчика, умножая амплитуды спектральных составляющих приращений первого кода угла при повороте вала на p1 шагов на  и сдвигая их фазы на угол
и сдвигая их фазы на угол  . Из блока 15 амплитуды и фазы гармоник с номерами j⋅p2 при всех j=1,2,…,b перед началом преобразования записываются в память блока 16.
. Из блока 15 амплитуды и фазы гармоник с номерами j⋅p2 при всех j=1,2,…,b перед началом преобразования записываются в память блока 16.
В процессе преобразования второй код угла N2 из преобразователя 4 поступает в блок 16, в котором формируется поправка Q2:
 .
.
В сумматоре 17 поправка Q2 добавляется к второму коду угла N2, поступающему из преобразователя 4, и на выходе формируется второй выходной код угла Nout2:
 .
.
При малых значениях погрешности Δ2, таких, что обеспечивается условие  , поправка
, поправка  и второй выходной код равен
и второй выходной код равен  , т.е. погрешность во втором выходном коде Nout2 также скомпенсирована с точностью до величины
, т.е. погрешность во втором выходном коде Nout2 также скомпенсирована с точностью до величины  второго порядка малости, обусловленной вычислительными погрешностями и точностью выполнения условия
второго порядка малости, обусловленной вычислительными погрешностями и точностью выполнения условия  .
.
В блоке 18 вычисляется разность  выходных кодов Nout1 и Nout2
выходных кодов Nout1 и Nout2
 ,
,
которая также представляет собой величину второго порядка малости по сравнению с  . Величина
. Величина  в компараторе 19 сравнивается по модулю с установленным допуском ε, и на выходе компаратора при
в компараторе 19 сравнивается по модулю с установленным допуском ε, и на выходе компаратора при  вырабатывается признак S достоверности выходного кода. Если по каким-либо причинам (изменение условий эксплуатации, старение элементов и материалов и т.п.) погрешности датчиков изменяются и величина
вырабатывается признак S достоверности выходного кода. Если по каким-либо причинам (изменение условий эксплуатации, старение элементов и материалов и т.п.) погрешности датчиков изменяются и величина  становится больше чем допуск ε, признак S перестает вырабатываться, что сигнализирует о необходимости повторения калибровки преобразователя, проведенной перед началом преобразования.
становится больше чем допуск ε, признак S перестает вырабатываться, что сигнализирует о необходимости повторения калибровки преобразователя, проведенной перед началом преобразования.
Предлагаемое техническое решение в настоящее время уже используется при калибровке цифровых преобразователей угла, изготавливаемых предприятием. Таким образом, заявленный технический результат достигнут.
Способ преобразования угла поворота вала в код, основанный на том, что вал первого и второго датчиков поворачивают в пределах диапазона, не меньшего 360°(1/p+1/p), где p и р - число периодов погрешности соответственно первого и второго датчика на обороте вала, преобразуют угол поворота вала в сигналы первого и второго датчиков с различными спектрами пространственной погрешности, выходные сигналы первого и второго датчиков преобразуют в первый и второй коды угла, определяют амплитуды и фазы пространственных гармоник погрешности первого и второго датчиков, формируют первую поправку как сумму пространственных гармоник погрешности первого датчика для угла, соответствующего первому коду угла, формируют выходной код, прибавляя первую поправку к первому коду угла, формируют вторую поправку как сумму пространственных гармоник погрешности второго датчика для угла, соответствующего второму коду угла, формируют второй выходной код, прибавляя вторую поправку к второму коду угла, формируют разность выходного и второго выходного кодов, по которой контролируют точность преобразования, отличающийся тем, что вал датчиков устанавливают с шагом 360°/(р⋅р) в расчетные положения по значениям второго кода угла, в этих положениях фиксируют значения первого кода угла, находят приращения первого кода угла при повороте на р шагов, определяют амплитуды и фазы i-х пространственных гармоник погрешности первого датчика, умножая амплитуды спектральных составляющих приращений первого кода угла при повороте на p шагов на и сдвигая их фазу на угол π/2-π⋅i/р, находят приращения первого кода угла при повороте вала на p шагов, а амплитуды и фазы j-х пространственных гармоник погрешности второго датчика определяют, умножая амплитуды спектральных составляющих приращений первого кода угла при повороте на p шагов на и сдвигая их фазы на угол π/2+π⋅j/р.



Перископ непроникающего типа с панорамной многоканальной системой наблюдения без вращения головной части относительно корпуса носителя
Способ измерения скорости судна доплеровским лагом
Устройство для измерения выходного сигнала пьезоэлектрического датчика
Способ измерения частоты эхосигнала в доплеровском лаге
Способ измерения скорости судна доплеровским лагом
Светоизлучающий волоконный световод на основе кварцевого стекла
Способ измерения скорости судна доплеровским лагом
Способ калибровки погрешностей бескарданной инерциальной системы на электростатических гироскопах в условиях орбитального полета
Способ определения момента дифферента гирокамеры двухстепенного поплавкового гироскопа
Способ калибровки погрешностей электростатических гироскопов бескарданной инерциальной системы ориентации в условиях орбитального космического аппарата
Способ определения дисперсии погрешности измерения двухмерного спектра волнения инерциальным измерительным модулем волномерного буя и устройство для его реализации

