Результат интеллектуальной деятельности: СПОСОБ ИССЛЕДОВАНИЯ ВНЕЗЕМНЫХ ОБЪЕКТОВ РАДИОИНТЕРФЕРОМЕТРАМИ СО СВЕРХДЛИННЫМИ БАЗАМИ
Вид РИД
Изобретение
Изобретение относится к радиоастрономии и может быть использовано для исследования тонких угловых деталей в радиоизлучении неба, а именно получения особо точных координат и угловых размеров внеземных объектов и построения радиоизображений небесных тел с высоким разрешением.
Известны способы и системы исследования внеземных объектов (авт. свид. СССР №995.062; патенты РФ №№2.059.205, 2.066.060, 2.100.820, 2.112.991, 2.254.588, 2.274.953, 2.316.034, 2.378.676, 2.453.813, 2.554.086; патенты США №№3.866.025, 4.827.422, 5.847613, 6.236.939, 6.414.632, 6.587.761, 6.775.600; патент WO №0.070.364; Финкельштейн A.M., Ипатов А.В. и др. Радиоинтерферометрическая сеть «Квазар-КВО» - базовая система фундаментального координатно-временного обеспечения. СПб. Труды ИЛА РАН, №13, 2005, - С. 104-138; Матвиенко Л.И. РСД исследования - суперразрешение. // “Известия Крымской астрофизической обсерватории”, №3, 2007, С. 66-77 и другие).
Из известных способов и систем наиболее близким к предлагаемому является способ исследования внеземных объектов радиоинтерферометрическим методом (Матвиенко Л.И. РСД исследования - суперразрешение. Журнал “Известия Крымской астрофизической обсерватории”, №3, 2007. - С. 66-77), который и выбран в качестве базового объекта.
Указанный способ в настоящее время используется в работе российской космической обсерватории «Спектр-Р» («Радиоастрон») и будет использоваться в работе проектируемой ныне другой российской радиоастрономической космической обсерватории «Спектр-М» («Миллиметрон»). В соответствии с этим способом размещают на Земле на максимально возможных расстояниях и/или в космическом пространстве систему из двух или более радиотелескопов, направляют их синхронно на исследуемый внеземной объект, осуществляют прием и регистрацию поступающих от него радиосигналов, а затем, используя корреляционный метод обработки и сравнения задержек и измеренных фазовых и иных характеристик сигналов от разных радиотелескопов системы, строят изображение исследуемого внеземного объекта.
Однако известный способ не обеспечивает точного и однозначного определения местоположения исследуемого внеземного объекта и его перемещения в космическом пространстве.
Технической задачей изобретения является точное и однозначное определение местоположения исследуемого внеземного объекта и его перемещения в пространстве путем использования трех сверхдлинных измерительных баз, расположенных в виде треугольника, и корреляционной обработки радиосигналов, принимаемых от исследуемого внеземного объекта (например, квазара или автоматической межпланетной станции (АМС).
Поставленная задача решается тем, что способ исследования внеземных объектов радиоинтерферометрами со сверхдлинными базами, основанный, в соответствии с ближайшим аналогом, на использовании двух или более радиотелескопов, которые направляют синхронно на исследуемый внеземной объект, осуществляют прием и регистрацию поступающих от него радиосигналов, а затем, используя корреляционный метод обработки и сравнение задержек и измеренных фазовых и иных характеристик сигналов от разных радиотелескопов и обладая высоким разрешением, строят радиоизображение исследуемого внеземного объекта, отличается от ближайшего аналога тем, что один из радиотелескопов (РТ) размещают на Луне, а два других - на Земле, образуя тем самым три сверхдлинные измерительные базы, расположенные в виде треугольника, радиосигналы, принимаемые лунным радиотелескопом, передают по радиоканалу в центр корреляционной обработки (ЦКО) информации, а радиосигналы, принимаемые земными радиотелескопами, передают по радиоканалам или по оптическим линиям связи в центр корреляционной обработки (ЦКО) информации, в котором указанные сигналы умножают и делят по фазе на два, выделяют гармонические напряжения и измеряют разности фаз между ними, формируя фазовые шкалы отсчета азимута α, угла места β и угла ориентации γ исследуемого внеземного объекта: точные, но неоднозначные, одновременно сигнал, принимаемый лунным радиотелескопом, пропускают через первый и второй блоки регулируемой задержки и перемножают с сигналами, принимаемыми первым и вторым земными радиотелескопами, выделяют низкочастотные напряжения, пропорциональные первой R1(τ) и второй R2(τ) корреляционным функциям, где τ - текущая временная задержка, изменением временной задержки τ обеспечивают максимальные значения первой R1(τ) и второй R2(τ) корреляционных функций, поддерживают их на максимальном уровне и фиксируют временные задержки τ=τз1 и τ=τз2, соответствующие максимуму корреляционных функций, сигнал, принимаемый вторым земным радиотелескопом, пропускают через третий блок регулируемой задержки и перемножают с сигналом, принимаемым первым земным радиотелескопом, выделяют низкочастотное напряжение, пропорциональное третьей корреляционной функции R3(τ), изменением временной задержки τ обеспечивают максимальное значение третьей корреляционной функции R3(τ), поддерживают ее на максимальном уровне и фиксируют временную задержку τ=τз3, соответствующую максимуму корреляционной функции, по зарегистрированным временным задержкам формируют временные шкалы отсчета азимута α, угла места β и угла ориентации γ исследуемого внеземного объекта, по измеренным угловым координатам определяют местоположение исследуемого внеземного объекта и его перемещения в космическом пространстве.
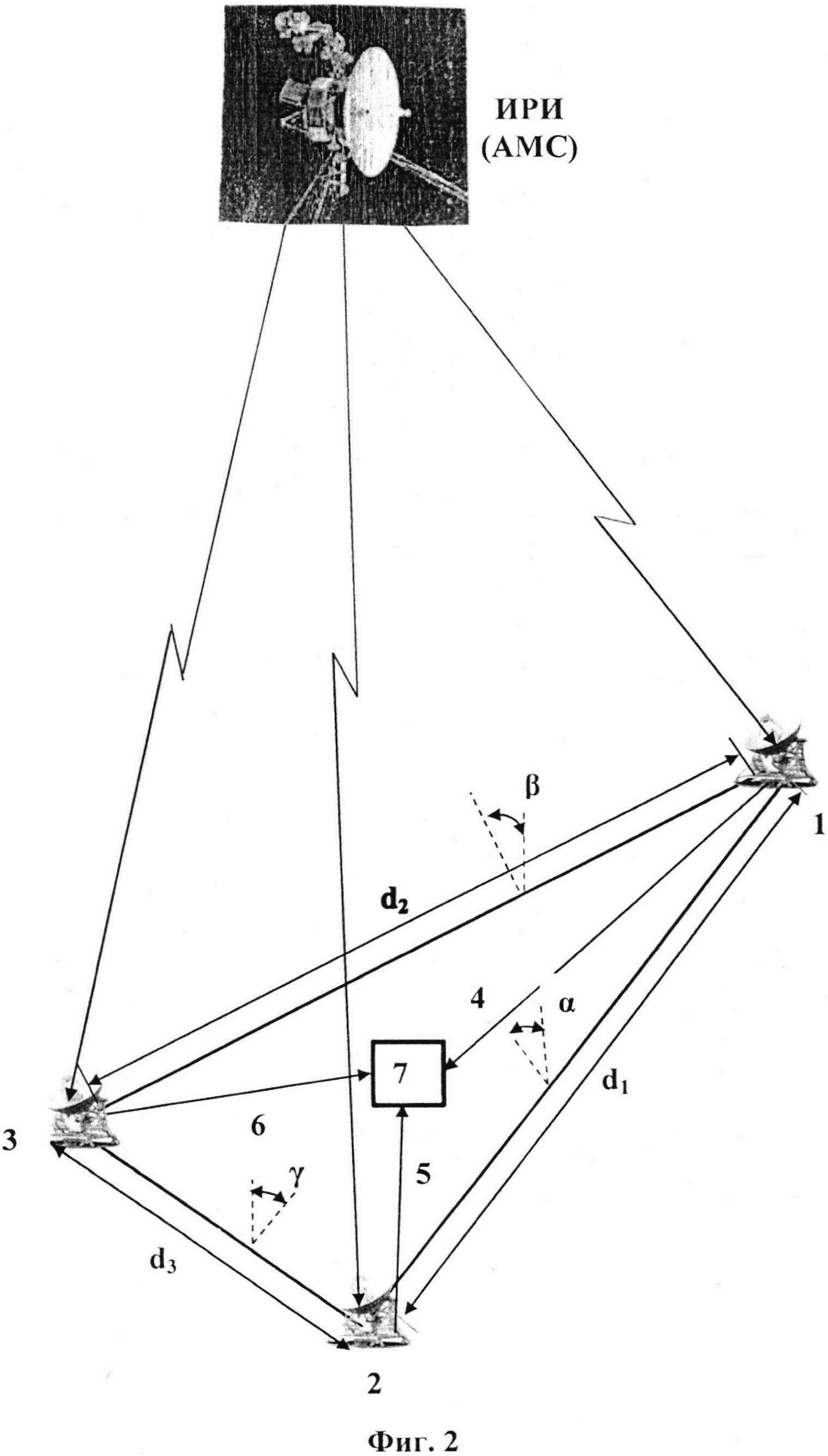
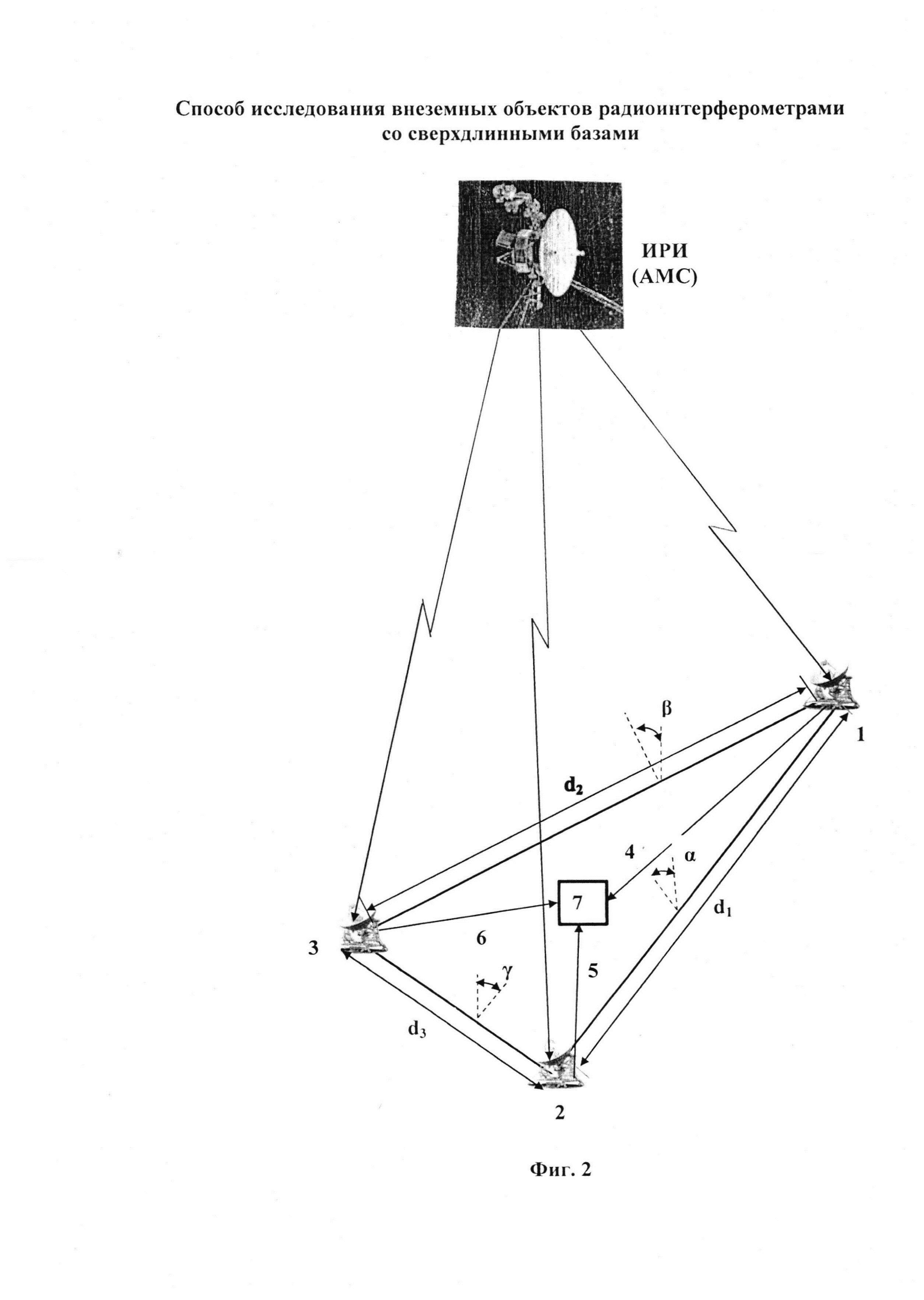
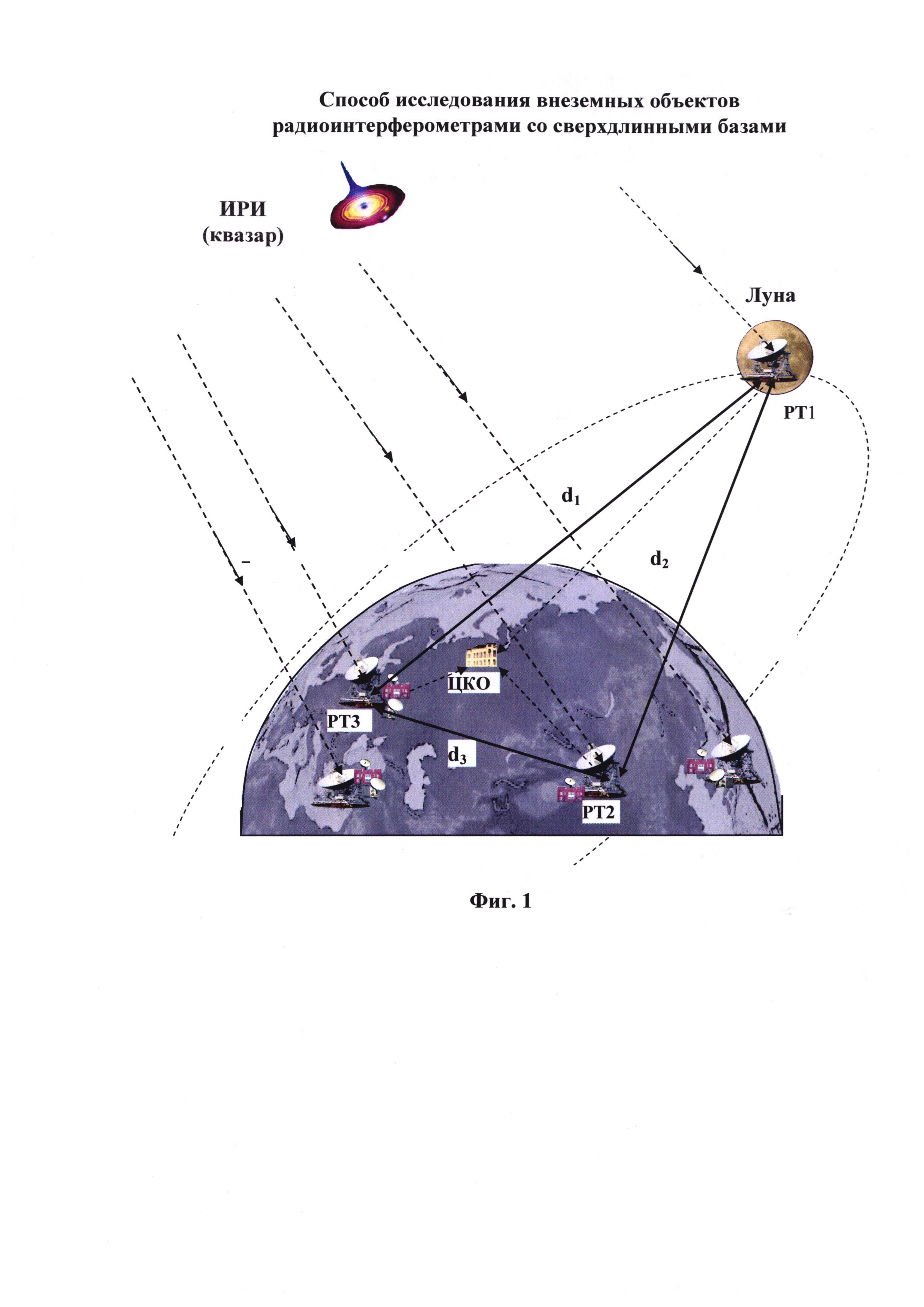
Схема построения радиоинтерферометра со сверхдлинными базами с расположением радиотелескопов на Земле и Луне показана на фиг. 1. Взаимное расположение трех радиотелескопов 1, 2, 3 и источника радиоизлучений (ИРИ) (внеземного объекта ВО) показано на фиг. 2. Структурная схема системы, реализующей предлагаемый способ, представлена на фиг. 3.
Система содержит три радиотелескопа 1, 2, и 3, один из которых размещают на Луне (1), а два других - на Земле (2 и 3), образуя тем самым три сверхдлинные измерительные базы d1, d2 и d3, расположенные в виде треугольника. Радиотелескопы 1, 2 и 3 соединены радиоканалами спутниковой связи и оптическими линиями связи с центром 7 корреляционной обработки информации, который содержит последовательно включенные удвоитель фазы 8 (9, 10), делитель фазы на два 11 (12, 13) и узкополосные фильтры 114 (15, 16), которые через фазометры 17 (18, 19) подключены к компьютеру 20. К выходу радиоканала 4 последовательно подключены перемножитель 23 (23.2), второй вход которого соединен с выходом оптического канала 5 (6), фильтр 24 (24.2) нижних частот и экстремальный регулятор 25.1 (25.2), выход которого соединен с вторым входом блока 22.1 (22.2) регулируемой задержки, второй выход которого через индикатор 26 азимута (индикатор 27 угла места) подключен к соответствующему входу компьютера 20. К выходу оптического канала связи 6 второго земного радиотелескопа 3 последовательно подключены блок 22.3 регулируемой задержки, перемножитель 23.3, второй вход которого соединен с выходом оптического канала 9 первого земного радиотелескопа 2, фильтр 24.3 нижних частот и экстремальный регулятор 25.3, выход которого соединен с вторым входом блока 22.3 регулируемой задержки, второй вход которого через индикатор 28 угла ориентации подключен к соответствующему входу компьютера 20.
Блок 22.1 (22.2, 22.3) регулируемой задержки, перемножитель 23.1 (23.2, 23.3), фильтр нижних частот 24.1 (24.2, 24.3) и экстремальный регулятор 25.1 (25.2, 25.3) образуют первый 21.1 (второй 22.1, третий 21.3) коррелятор.
Предлагаемый способ реализуют следующим образом.
На Луне устанавливают радиотелескоп 1, два других радиотелескопа 2 и 3 устанавливают на Земле (например, РСДБ-комплекс «Квазар-КВО»). Между ними и центром корреляционной обработки информации обеспечивают надежную связь через радиоканал 4 и оптические каналы 5 и 6. Радиотелескопы 1, 2 и 3 синхронно направляют на исследуемый внеземной объект 30 (ИРИ), который излучает широкополосные шумоподобные или другие любые радиосигналы, например, сигналы автоматических межпланетных станций (АМС), например «ЭкзоМарс» и других.
Сложные сигналы с фазовой манипуляцией (ФМн), принимаемые радиотелескопами 1, 2 и 3, имеют следующий вид:
u2(t)=U2cos[ωc(t-τ1)+ϕk(t-τ1)+ϕ2],
u1(t)=U1cos[ωct+ϕk(t)+ϕ1],
u3(t)=U3cos[ωc(t-τ2)+ϕk(t-τ3)+ϕ2], 0≤t≤Tc,
где ϕk(t)={0, π} - манипулируемая составляющая фазы, отображающая закон фазовой манипуляции в соответствии с модулирующим кодом M(t) (псевдослучайная последовательность), причем ϕk(t)=const при  и может изменяться скачком при t=kτэ. т.е. на границах между элементарными посылками (к=1, 2, …, N-1);
и может изменяться скачком при t=kτэ. т.е. на границах между элементарными посылками (к=1, 2, …, N-1);
τЭ, N - длительность и количество элементарных посылок, из которых составлен сигнал длительностью Tc(Tc-NτЭ);
 - время запаздывания сигнала, приходящего на радиотелескоп 1, по отношению к сигналу, приходящему на радиотелескоп 2;
- время запаздывания сигнала, приходящего на радиотелескоп 1, по отношению к сигналу, приходящему на радиотелескоп 2;
 - время запаздывания сигнала, приходящего на радиотелескоп 1, по отношению к сигналу, приходящему на радиотелескоп 3;
- время запаздывания сигнала, приходящего на радиотелескоп 1, по отношению к сигналу, приходящему на радиотелескоп 3;
 - время запаздывания сигнала, приходящего на радиотелескоп 2, по отношению к сигналу, приходящему на радиотелескоп 3 (фиг. 1);
- время запаздывания сигнала, приходящего на радиотелескоп 2, по отношению к сигналу, приходящему на радиотелескоп 3 (фиг. 1);
d1, d2, d3 - сверхдлинные измерительные базы;
α, β, γ - азимут, угол места и угол ориентации ИРИ (30).
С выходов радиотелескопов 1, 2 и 3 указанные сигналы через линии связи 4, 5 и 6 поступают на входы центра 7 корреляционной обработки информации, а именно на входы удвоителей 8, 9 и 10 фазы, а затем на входы делителей 11, 12 и 13 фазы на два. На выходе последних образуются следующие гармонические колебания соответственно:
u4(t)=U4cos(ωct+ϕ1),
u5(t)=U5cos[ωc(t-τ1)+ϕ2],
u6(t)=U6cos[ωc(t-τ2)+ϕ3], 0≤t≤Tc,
которые выделяются узкополосными фильтрами 14, 15 и 16 соответственно и поступают на входы фазометров 17, 18 и 19. Последние измеряют следующие разности фаз:
где λ - длина волны,
которые фиксируются компьютером 20.
Так формируются фазовые шкалы отсчета угловых координат α, β и γ: точные, но неоднозначные.
Принимаемые шумоподобные сигналы u1(t) и u2(t), u1(t) и u3(t), u2(t) и u3(t) одновременно поступают на два входа корреляторов 21.1, 21.2 и 21.3. Получаемые на выходе фильтров 24.1, 24.2 и 24.3 нижних частот корреляционные функции R1(τ), R2(τ) и R3(τ) имеют максимум при значении введенного регулируемого задержания:
τ1=t2-t1, τ2=t3-t1, τ3=t3-t2,
где t1, t2 и t3 - время прохождения сигналом расстояний R1, R2 и R3 от ИРИ (ВО) до радиотелескопов 1, 2 и 3 соответственно.
Максимальные значения корреляционных функций R1(τ), R2(τ) и R3(τ) поддерживаются с помощью экстремальных регуляторов 25.1, 25.2 и 25.3, воздействующих на управляющие входы блоков 22.1, 22.2 и 22.3 регулируемой задержки.
Шкалы блоков 22.1, 22.2 и 22.3 регулируемой задержки (указатели углов) проградуированы непосредственно в значениях угловых координат α, β и γ ИРИ (ВО):
где τ1, τ2 и τ3 - введенные временные задержки сигналов, соответствующие максимальным значениям корреляционных функций R1(τ), R2(τ) и R3(τ).
Значения угловых координат α, β, и γ фиксируются соответствующими индикаторами 26, 27 и 28 и поступают в компьютер 20.
Так формируются временные шкалы отсчета угловых координат α, β, и γ: грубые, но однозначные.
Следует отметить, что расположение радиотелескопов 1, 2 и 3 в виде треугольника продиктовано новой идеологией фазовой пеленгации источников радиоизлучений (внеземных объектов) в пространстве, которая обеспечивает определение местоположения ИРИ (ВО) и его перемещения в пространстве пассивным методом. Причем для точного и однозначного определения местоположения ИРИ (ВО) и его перемещения в пространстве используются фазовые шкалы отсчета угловых координат α, β и γ: точные, но неоднозначные и временные шкалы отсчета угловых координат α, β и γ: грубые, но однозначные, получаемые за счет корреляционной обработки принимаемых сигналов.
Таким образом, предлагаемый способ исследования внеземных объектов радиоинтерферометрами со сверхдлинными базами по сравнению с базовым объектом и другими техническими решениями аналогичного назначения обеспечивает точное и однозначное определение местоположения исследуемого внеземного объекта и его перемещение в пространстве. Это достигается за счет использования трех сверхдлинных измерительных баз, расположенных в виде треугольника, и корреляционной обработки радиосигналов, принимаемых от исследуемого внегалактического объекта.
Предлагаемый способ (лунный вариант) отличается новизной, оригинальностью, является перспективным и может найти практическое применение при освоении человеком ближнего и дальнего космоса.
Современные астрономические и геодезические РСДБ-наблюдения позволяют определять различные параметры (положение радиоисточников, параметры вращения Земли, координаты станций) с точностью λ/d, где λ - длина волны наблюдений, a d - длина базы между двумя радиотелескопами.
В настоящее время длина волны наблюдений составляет д 7,5 мм, а длина фазы ограничена диаметром Земли. Наблюдения на более коротких длинах волн невозможны из-за интенсивного поглощения таких волн земной атмосферой и высоких требований к аппаратуре. Таким образом, единственным методом увеличить точность решения координатных задач является увеличение длины базы посредством использования радиотелескопа за пределами Земли.
В случае успеха предлагаемый лунный проект станет первым и уникальным в своем роде сооружением и позволит решить мировые научные задачи, не решаемые иными средствами:
- повышение точности реализации Международной небесной системы координат (ICRF) более чем на порядок;
- повышение точности модели орбитального и вращательного движения Луны на два порядка;
- точное задание ориентации группировки ГЛОНАСС в ICRF, что обеспечит высокоточную навигацию в космическом пространстве в инерциальной системе отсчета;
- изучение внутреннего строения Луны из анализа высокоточной модели ее вращения;
- повышение точности эфемерид планет солнечной системы;
- проверка научных гипотез из области астрофизики и релятивистской небесной механики;
- повышение точности и однозначности определения местоположения и перемещение в пространстве спутников глобальной навигационной системы ГЛОНАСС и геостационарных ИСЗ-ретрансляторов, используемых в дуплексном методе сличения удаленных шкал времени, а также в службе единого времени частоты;
- повышение точности и однозначности определения местоположения и перемещения в пространстве источников радиоизлучения, размещенных на различных носителях (космические аппараты, самолеты, ракеты и т.п.);
- повышение точности и однозначности определения местоположения и перемещения в пространстве небесных тел, планет, метеоритов и т.п., находящихся в ближнем м дальнем космосе.
Кроме того, предлагаемый лунный проект дает толчок к разработке технологий для:
- роботизированных миссий по возведению дистанционно управляемых прецизионных конструкций на поверхности Луны, что является новой и уникальной задачей;
- мягкой посадки на Луну, что актуально для всей отечественной лунной программы;
- пересылки (по оптическому или радиоканалу) больших объемов цифровых данных между Луной и Землей.
Способ исследования внеземных объектов радиоинтерферометрами со сверхдлинными базами, основанный на использовании двух или более радиотелескопов, которые направляют синхронно на исследуемый объект, осуществляют прием и регистрацию поступающих от него радиосигналов, а затем, используя корреляционный метод обработки и сравнения задержек и измененных фазовых характеристик сигналов от разных радиотелескопов, строят изображение исследуемого внеземного объекта, отличающийся тем, что один из радиотелескопов размещают на Луне, а два других - на Земле, образуя тем самым три сверхдлинные измерительные базы, расположенные в виде треугольника, радиосигналы, принимаемые лунным радиотелескопом, передают по радиоканалу в центр корреляционной обработки информации, а радиосигналы, принимаемые земными радиотелескопами, передают по радиоканалам или по оптическим линиям связи в центр корреляционной обработки информации, в котором указанные сигналы умножают и делят по фазе на два, выделяют гармонические напряжения и измеряют разности фаз между ними, формируя фазовые шкалы отсчета азимута α, угла места β и угла ориентации γ исследуемого внеземного объекта: точные, но неоднозначные, одновременно сигнал, принимаемый лунным радиотелескопом, пропускают через первый и второй блоки регулируемой задержки и перемножают с сигналами, принимаемыми первым и вторым земными радиотелескопами, выделяют низкочастотные напряжения, пропорциональные первой R(τ) и второй R(τ) корреляционным функциям, где τ - текущая временная задержка, изменением временной задержки τ обеспечивают максимальные значения первой R(τ) и второй R(τ) корреляционных функций, поддерживают их на максимальном уровне и фиксируют временные задержки τ=τ и τ=τ, соответствующие максимуму корреляционных функций, сигнал, принимаемый вторым земным радиотелескопом, пропускают через третий блок регулируемой задержки и перемножают с сигналом, принимаемым первым земным радиотелескопом, выделяют низкочастотное напряжение, пропорциональное третьей корреляционной функции R(τ), изменением временной задержки τ обеспечивают максимальное значение третьей корреляционной функции R(τ), поддерживают ее на максимальном уровне и фиксируют временную задержку τ=τ, соответствующую максимуму корреляционной функции R(τ), по зарегистрированным временным задержкам формируют временные шкалы отсчета азимута α, угла места β и угла ориентации γ исследуемого внеземного объекта, по измеренным угловым координатам определяют местоположение исследуемого внеземного объекта и его перемещение в космическом пространстве.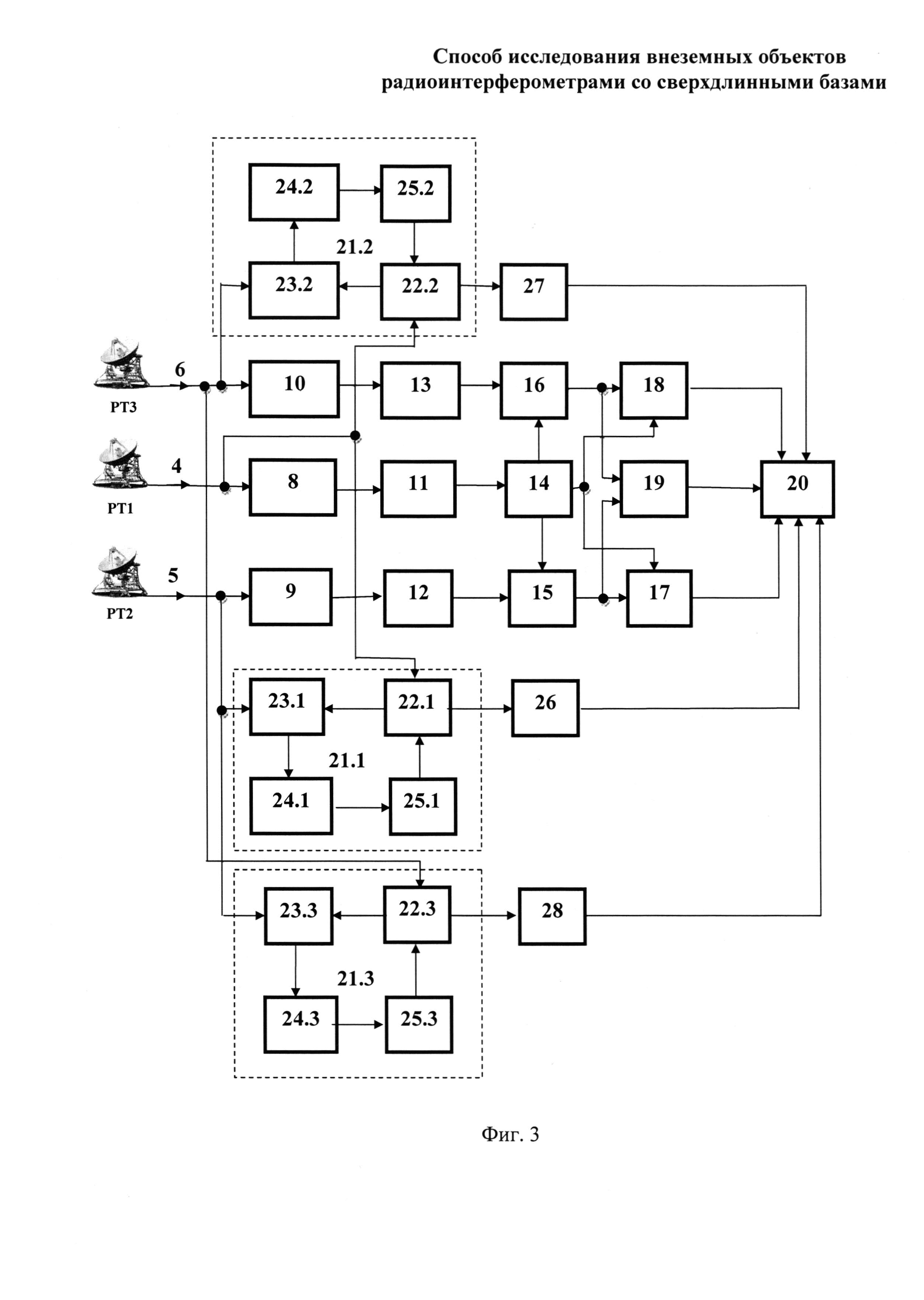
Устройство для дистанционного измерения давления
Система мониторинга безопасной эксплуатации зданий и инженерно-строительных сооружений
Трость для инвалида по зрению
Система дистанционного контроля и диагностики состояния конструкций и инженерно-строительных сооружений
Система контроля расхода и утечек бытового газа в многоквартирных домах
Экологическая система сбора информации о состоянии региона
Система охраны и наблюдения
Способ идентификации транспортных средств и выявления заявленных на поиск автомобилей при прохождении контрольных пунктов и устройство для его осуществления
Способ управления самолетом при заходе на посадку
Радиоприемное устройство для обнаружения широкополосных сигналов с фазовой манипуляцией
Устройство для дистанционного измерения давления
Система мониторинга безопасной эксплуатации зданий и инженерно-строительных сооружений
Трость для инвалида по зрению
Система дистанционного контроля и диагностики состояния конструкций и инженерно-строительных сооружений
Система контроля расхода и утечек бытового газа в многоквартирных домах
Экологическая система сбора информации о состоянии региона
Система охраны и наблюдения
Способ идентификации транспортных средств и выявления заявленных на поиск автомобилей при прохождении контрольных пунктов и устройство для его осуществления
Способ управления самолетом при заходе на посадку
Радиоприемное устройство для обнаружения широкополосных сигналов с фазовой манипуляцией

