Результат интеллектуальной деятельности: АДАПТИВНЫЙ ЗАХВАТ
Вид РИД
Изобретение
Изобретение относится к устройствам захвата в манипуляторах и робототехнике и может быть использовано при подъеме и транспортировке объектов произвольной формы в автоматическом режиме.
Известен палец робота, который содержит множество фаланг, каждая из которых приводится в действие управляемым электроприводом. Палец имеет сенсоры касания, которые включены в систему управления электроприводами в качестве датчиков обратной связи. При этом используются два уровня датчиков, обеспечивающих получение информации об ориентации захватываемой детали. (Патент США № US 2012013139 (А1) «Эффективный и послушный палец робота (Dexterous and compliant robotic figner)», МПК: B25J 13/08; B25J 15/08, B25J 13/084, B25J 15/0009, опубликован 19.01.2012.)
Недостатком этого устройства является низкая надежность захвата транспортируемых объектов из-за невозможности адаптации формы поверхности пальца к форме транспортируемого объекта.
Наиболее близким к заявляемому устройству является адаптивное трехпалое захватное устройство, которое включает систему управления и корпус с установленными на нем тремя пальцами, расположенными в вершинах равнобедренного или равностороннего треугольника. Каждый палец состоит из трех фаланг с приводами, первая из которых поворачивается относительно корпуса, а вторая и третья фаланги поворачиваются относительно первой и второй соответственно с помощью индивидуальных поворотных приводов с параллельными осями вращений. Причем два пальца могут быть выполнены с возможностью поворота вокруг оси, перпендикулярной плоскости установки пальцев и перпендикулярной осям поворота фаланг. Каждый из пальцев выполнен с возможностью поворота относительно корпуса на угол не менее 90° с помощью индивидуального привода. В корпусе установлен поворотный привод, поворачивающий корпус с пальцами относительно конструктивного элемента корпуса, с помощью которого захватное устройство крепится к манипулятору. В качестве индивидуальных приводов используются сервоприводы с встроенным моментным очувствлением, а контактные поверхности фаланг оснащены тактильными датчиками (патент RU №2481942 С2 «Адаптивное трехпалое захватное устройство», МПК B25J 15/00, опубликован 20.05.2013).
Основным недостатком прототипа является низкая надежность захвата транспортируемых объектов из-за отсутствия адаптации формы поверхности пальца к форме транспортируемого объекта, что обусловлено невозможностью изменения размеров корпуса и пальцев устройства, что также ограничивает размеры захватываемого объекта.
Задачей изобретения является повышение надежности захвата транспортируемых объектов и расширение диапазона их размеров.
Технический результат от повышения надежности захвата транспортируемых объектов и расширения диапазона их размеров состоит в повышении эффективности работы устройства.
Указанная задача решается за счет того, что предлагаемое устройство, как и принятое за прототип, состоит из системы управления и электромеханической системы, включающей корпус (ладонь) с приводами и с установленными на нем пальцами; каждый палец состоит из фаланг с индивидуальными приводами, с контроллерами и тактильными датчиками на контактных поверхностях
В отличие от известного, в предлагаемом устройстве ладонь и фаланги пальцев выполнены в виде однотипных модулей, содержащих нижнюю и верхнюю платформы, каждая из которых состоит из опорной площадки и не менее трех крепежных площадок, каждая крепежная площадка связана с соседними телескопическими стержнями и с опорными площадками управляемыми стержнями, содержащими электроприводы, редукторы, датчики перемещения и датчики силы, при этом тактильные датчики установлены на внешних поверхностях крепежных площадок; верхняя и нижняя платформы связаны между собой шестью ногами-актуаторами, содержащими нижние шарниры, крепящиеся к крепежным площадкам нижней платформы, и верхние шарниры, крепящиеся к крепежным площадкам верхней платформы, а также линейные электроприводы с редукторами, датчиками перемещения и датчиками силы,
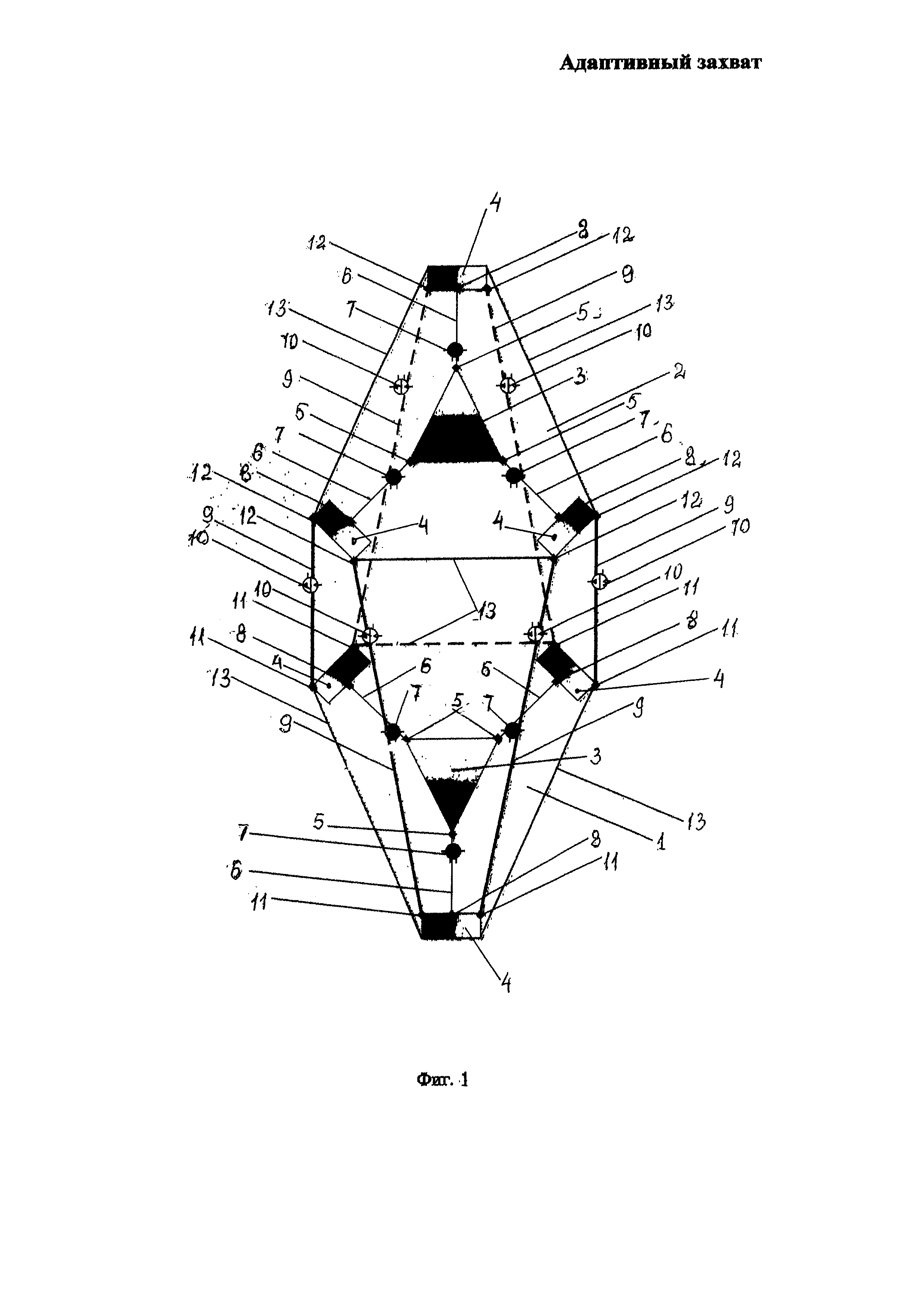
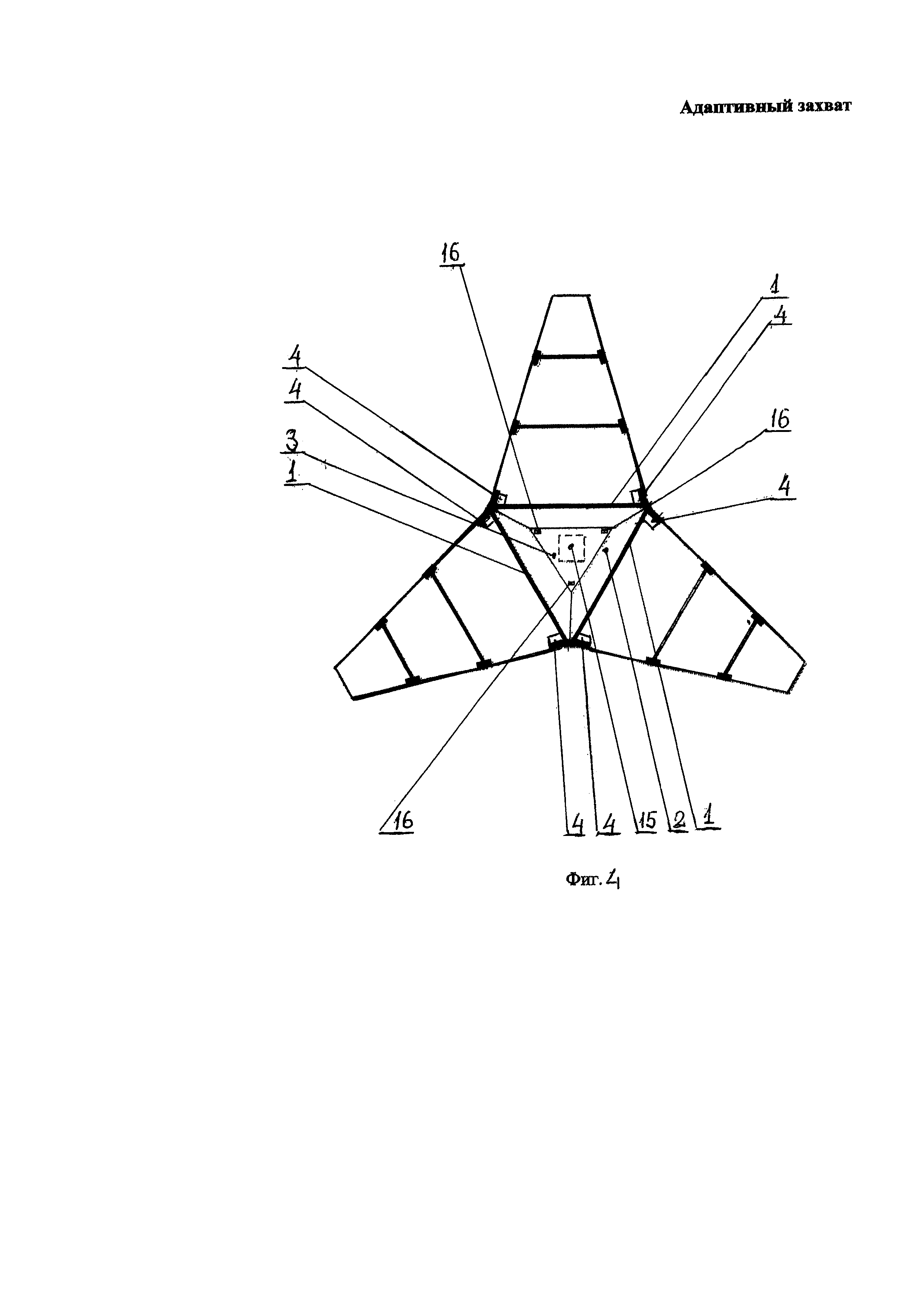
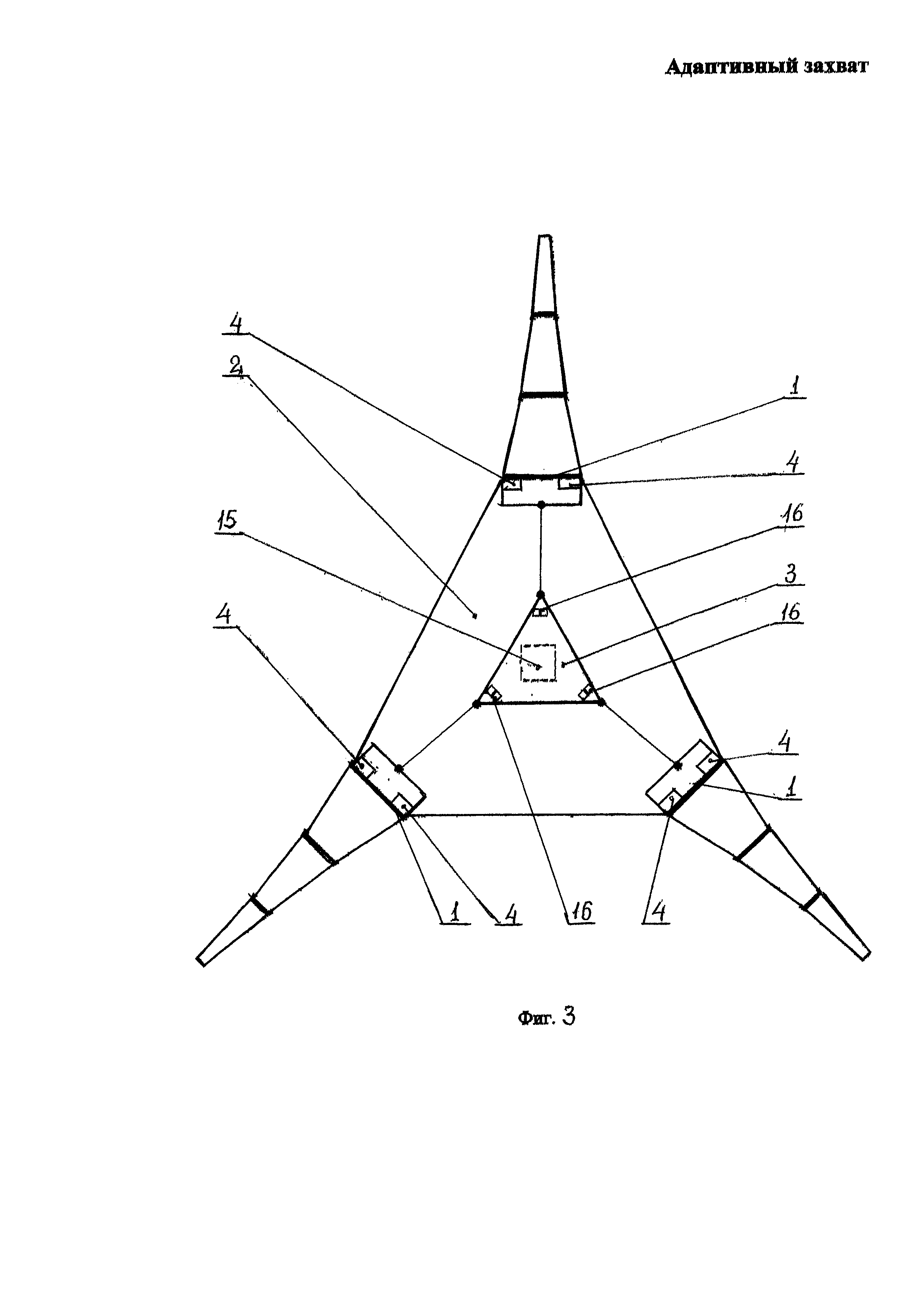
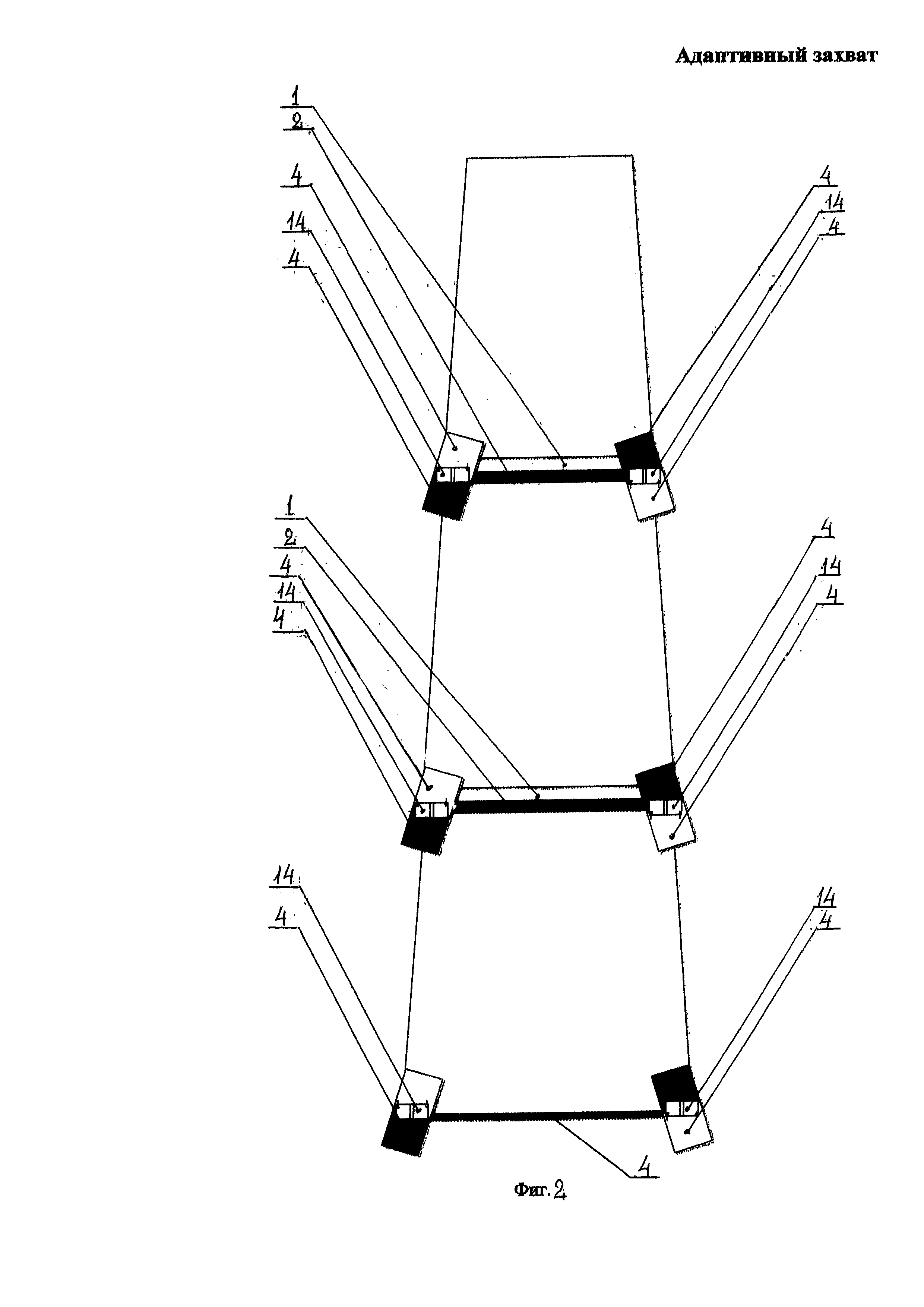
Изложенная сущность изобретения поясняется чертежами, где на фиг. 1 представлен вид однотипного модуля ладони и фаланг, на фиг. 2 - общий вид пальцев, на фиг. 3 - общий вид захвата с независимым креплением фаланг пальцев, на фиг. 4 - общий вид захвата с зависимым креплением фаланг пальцев.
Ладонь и фаланги пальцев выполнены в виде отдельных однотипных модулей, схема которого представлена на фиг. 1. Модуль включает нижнюю 1 и верхнюю 2 платформы, каждая из которых содержит опорную площадку 3 и не менее трех крепежных площадок 4. Опорные площадки 3 через шарниры 5 соединены управляемыми стержнями 6 с приводами 7 и через шарниры 8 с крепежными площадками 4, что позволяет изменять размер и форму платформ 1 и 2. Нижняя 1 и верхняя 2 платформы связаны между собой шестью ногами-актуаторами 9 с приводами 10, через нижние 11 и верхние 12 шарниры. Крепежные площадки 4 связаны с соседними телескопическими стержнями 13. Приводы 10 снабжены редукторами, датчиками перемещения и датчиками силы (на чертеже не указаны).
Пальцы устроены следующим образом (фиг. 2). К крепежным площадкам 4 верхних платформ 2 модулей первых фаланг пальцев присоединяются крепежные площадки 4 нижних платформ 1 модулей вторых фаланг, а к крепежным площадкам 4 верхних платформ 2 модулей вторых фаланг присоединяются крепежные площадки 4 нижних платформ 1 модулей третьих фаланг. Количество фаланг и пальцев при необходимости может меняться как в большую, так в меньшую сторону
На внешних поверхностях крепежных площадок 4 модулей фаланг пальцев расположены тактильные датчики 14.
Крепление пальцев к ладони может быть двух типов: независимым (фиг. 3) и зависимым (фиг. 4)
При независимом креплении фаланг пальцев (фиг. 3) с каждой крепежной площадкой 4 верхней платформы 2 модуля, именуемого, по аналогии с человеческой рукой, ладонью, закрепляются крепежные площадки 4 нижних платформ 1 модулей первых фаланг манипуляторов, именуемых «пальцы».
При зависимом креплении фаланг пальцев (фиг. 4) две крепежные площадки 4 нижних платформ 1 модулей первых фаланг манипуляторов, именуемых «пальцы», закрепляются сразу с двумя крепежными площадками 4 верхней платформы 2 модуля, именуемого, по аналогии с человеческой рукой, ладонью.
На опорной площадке 3 верхней платформы 2 модуля (фиг. 3 и фиг. 4), именуемого, по аналогии с человеческой рукой ладонью, с внутренней стороны расположен блок управления 15, а на внешней поверхности расположены тактильные датчики 16.
Работа устройства.
Блок управления 15 с помощью входящей в его состав системы технического зрения оценивает размеры и форму объекта транспортировки. Затем по командам из блока управления 15 с помощью приводов 7 стержней 6 платформы 2 модуля ладони изменяется ее размер в соответствии с размером транспортируемого объекта; с помощью приводов 10 ног-актуаторов 9 модулей фаланг пальцев изменяется длина пальцев в соответствии с размером транспортируемого объекта; с помощью приводов 7 стержней 6 платформ 1 и 2 модулей фаланг пальцев изменяются их ширина и форма в соответствии с размером и формой транспортируемого объекта. Таким образом, происходит адаптация захвата под размер и форму транспортируемого объекта.
Далее по командам из системы управления 15 производится перемещение устройства в точку захвата и с помощью приводов 10 ног-актуаторов 9 модуля ладони по командам из системы управления 15 центр платформы 2 ладони с использованием корректирующих сигналов от тактильных датчиков 16 этой платформы вводится в соприкосновение с захватываемым объектом. Наконец, по командам из системы управления 15 с помощью приводов 10 ног-актуаторов 9 модулей фаланг пальцев последние с использованием корректирующих сигналов от тактильных датчиков 14 платформ 1 и 2 модулей фаланг пальцев вводятся в соприкосновение с захватываемым объектом.
Требуемое усилие захвата развивается приводами 10 ног-актуаторов 9 модулей фаланг пальцев и приводов 7 стержней 6 платформ 1 и 2 модулей фаланг пальцев в соответствии с сигналами из системы управления 15 и с корректирующими сигналами от датчиков силы в ногах-актуаторах 9 и стержнях 6 модулей платформ 1 и 2 модулей фаланг пальцев. После этого по командам из системы управления 15 транспортируемый объект поднимается и перемещается в требуемую точку отгрузки.
Таким образом, производится доставка транспортируемых объектов в точку отгрузки с высокой эффективностью.
Адаптивный захват манипулятора, содержащий систему управления и электромеханическую систему, выполненную в виде корпуса с приводами и установленными на нем пальцами, каждый из которых состоит из фаланг с тактильными датчиками, установленными на контактных поверхностях, отличающийся тем, что корпус и фаланги пальцев выполнены из однотипных модулей в виде нижней и верхней платформ, каждая из которых содержит опорную площадку и не менее трех крепежных площадок, причем каждая из крепежных площадок связана с соседними посредством телескопических стержней и с опорными площадками посредством управляемых стержней, содержащих электроприводы, редукторы, датчики перемещения и датчики силы, при этом верхняя и нижняя платформы связаны между собой посредством шести ног-актуаторов, содержащих нижние шарниры, прикрепленные к крепежным площадкам нижней платформы, и верхние шарниры, прикрепленные к крепежным площадкам верхней платформы, и линейные электроприводы с редукторами, датчиками перемещения и датчиками силы, при этом тактильные датчики установлены на внешних поверхностях крепежных площадок.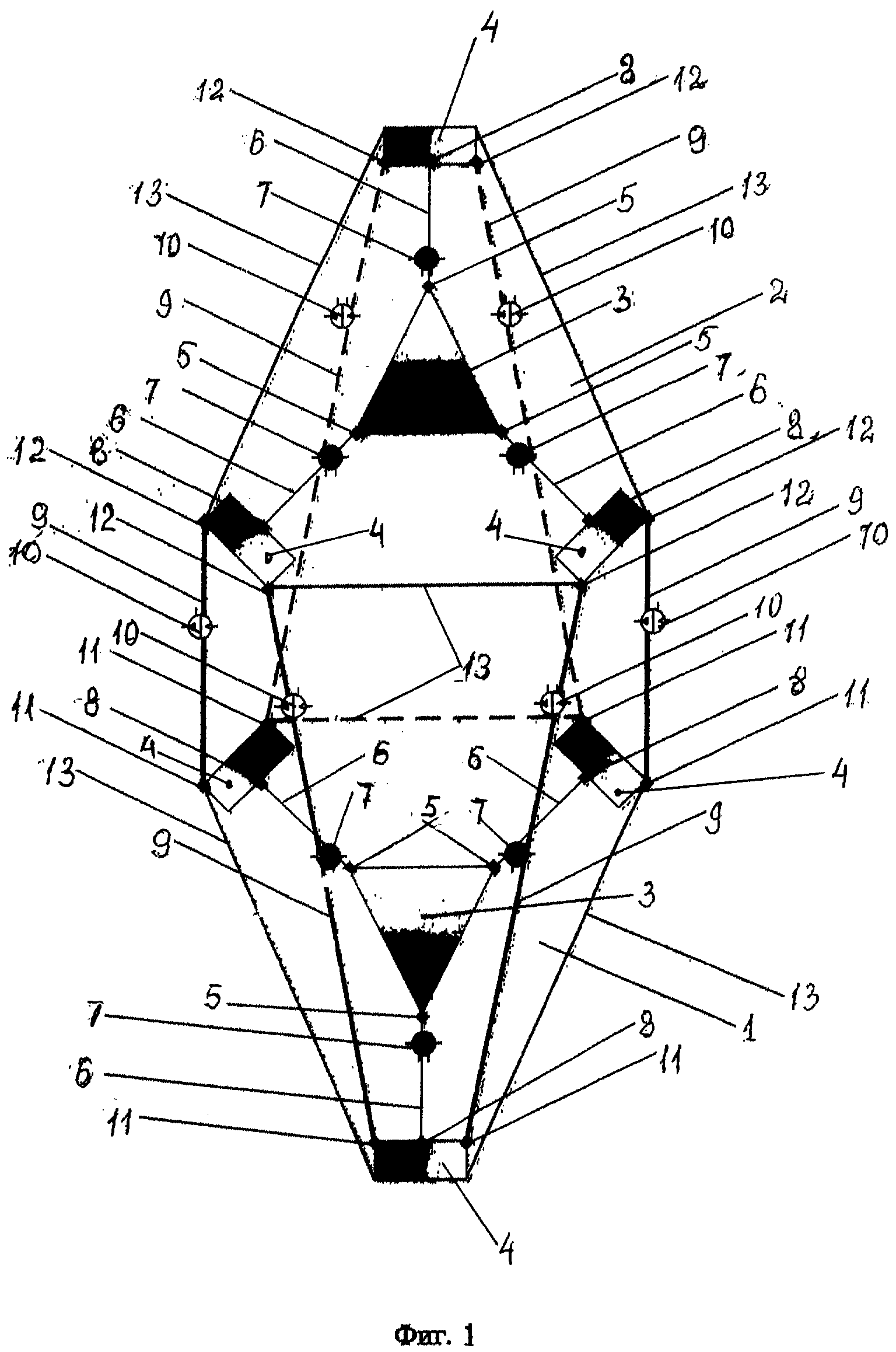
Устройство для разрушения плит и покрытий раскалыванием и дроблением
Способ адаптации отражающих поверхностей антенны
Способ дефектоскопии металлических изделий при их поверхностной обработке
Способ генерации энергии, при котором используют и одновременно с этим частично гасят вредную вибрацию опоры (варианты)
Способ восстановления изношенной внутренней цилиндрической поверхности
Способ формирования микрорельефа на поверхности металлических изделий
Способ определения вклада пластической деформации в величину акустической анизотропии при измерении в деталях машин и элементах конструкции
Торовый шпангоут
Адаптивный захват
Способ классификации изображений
Устройство для разрушения плит и покрытий раскалыванием и дроблением
Способ адаптации отражающих поверхностей антенны
Способ дефектоскопии металлических изделий при их поверхностной обработке
Способ генерации энергии, при котором используют и одновременно с этим частично гасят вредную вибрацию опоры (варианты)
Способ восстановления изношенной внутренней цилиндрической поверхности
Способ формирования микрорельефа на поверхности металлических изделий
Адаптивный захват
Медицинский микроробот
Способ формирования отражающих зеркальных поверхностей антенны космического радиотелескопа
Способ классификации изображений

