Результат интеллектуальной деятельности: Способ калибровки электронного магнитного компаса
Вид РИД
Изобретение
Заявляемый способ калибровки электронного магнитного компаса (МК) относится к способам построения устройств, используемых на подвижных объектах. Способ может быть использован, преимущественно, для калибровки автономной навигационной системы пешехода, например, с целью повышения точности определения азимута передвижения объекта по данным МК при отсутствии сигналов глобальных навигационных систем (ГНС).
Магнитное поле Земли может использоваться для решения задач навигации. Однако это поле подвержено влиянию многочисленных возмущающих факторов [1], в том числе: глобальных и локальных аномалий, инструментальных погрешностей аппаратуры и т.п.
Серьезный вклад в погрешности магнитометров вносят инструментальные погрешности самого прибора. Измерительный сигнал М, поступающий от любого канала магнитометра, может быть представлен в виде

где k - коэффициент чувствительности канала, Н - проекция напряженности магнитного поля на соответствующую ось, m - статическая ошибка магнитометра по этой оси (значение М при отсутствии магнитного поля). Проблема магнитометров состоит в том, что величины k и m по осям отличаются друг от друга. В результате чего при измерении постоянного магнитного поля и произвольном вращении трехосного магнитометра сигналы М образуют поверхность эллипсоида с центром не в начале координат. Для калибровки (определения неизвестных параметров магнитометра k и m) аппроксимируют полученные результаты измерений и вычисляют искомые величины, используя численные методы, например метод наименьших квадратов. Такую процедуру отличает высокая трудоемкость. Во многих применениях удовлетворительной точности калибровки можно добиться, разбив задачу трехмерной калибровки в координатах 0XYZ на две двухмерные задачи: в плоскостях 0XY и 0YZ. В ряде случаев, например, при перемещении по поверхности Земли, для определения азимута - направления на магнитный полюс (МП), достаточно выполнить калибровку в этой плоскости. Однако даже для плоской задачи известные авторам алгоритмы вычисления параметров магнитометра достаточно сложны.
Известен способ калибровки [2] любых векторных измерительных приборов (магнитометров, акселерометров, антенных решеток и т.п.), заключающийся во вращении приборов на разные углы и измерении соответствующих величин с расчетом требуемых корректировок.
Недостатком данного способа является его высокая сложность.
Известен способ калибровки электронного магнитного компаса [3], заключающийся в перемещении его по определенной траектории и сопоставлении его показаний с данными ГНС.
Недостаток этого способа заключается в низкой точности калибровки, обусловленной погрешностями ГНС.
Известен способ калибровки электронного магнитного компаса [4], заключающийся в измерении магнитных полей большим количеством магнитометров и формировании искажающей матрицы калибруемого электронного магнитного компаса.
Недостаток этого способа заключается в высокой сложности калибровки.
Наиболее близким к заявляемому является способ калибровки электронного магнитного компаса [5], заключающийся в том, что компас устанавливают на плоскость так, чтобы приемники магнитного поля его ортогональных осей 0Х и 0Y лежали в этой плоскости, вращают компас вокруг оси 0Z, перпендикулярной этой плоскости, и фиксируют его в четырех, i=1÷4, ортогональных положениях, в каждом положении компаса измеряют сигналы приемников магнитного поля Mxi и Myi по осям 0Х и 0Y, оценивают статические ошибки компаса mx и my по каждой из осей компаса путем определения средних значений сигналов Mxi и Myi по всем положениям компаса:

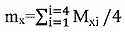
определяют k - отношение чувствительностей приемников компаса по осям 0Х и 0Y, используя соотношение:

при использовании компаса совмещают ось 0Х с направлением движения, измеряют сигналы приемников магнитного поля Bx и By по осям 0Х и 0Y и определяют истинное направление - α на магнитный полюс в плоскости X0Y по формуле:

Недостаток этого способа заключается в низкой точности калибровки, а следовательно, и определения истинного направления - α на магнитный полюс.
Задачей, решаемой заявляемым изобретением, является повышение точности калибровки.
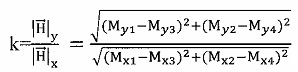
Для решения этой задачи в способе калибровки электронного магнитного компаса, заключающемся в том, что компас устанавливают на плоскость так, чтобы приемники магнитного поля его ортогональных осей 0Х и 0Y лежали в этой плоскости, вращают компас вокруг оси 0Z, перпендикулярной этой плоскости, и фиксируют его в четырех, i=1÷4, ортогональных положениях, в каждом положении компаса измеряют сигналы приемников магнитного поля Mxi и Myi по осям 0Х и 0Y, оценивают статические ошибки компаса mx и my по каждой из осей компаса путем определения средних значений сигналов Mxi и Myi по всем положениям компаса, используя, так же как в [5], соотношение (2), определяют k - отношение чувствительностей приемников компаса по осям 0Х и 0Y, при использовании компаса совмещают ось 0Х с направлением движения, измеряют сигналы приемников магнитного поля Вх и Ву по осям 0Х и 0Y и вычисляют истинное направление на магнитный полюс в плоскости X0Y, так же как в [5], по формуле (4), k - отношение чувствительностей приемников компаса по осям 0Х и 0Y, вычисляют как отношение модулей вектора магнитного поля  , полученных с использованием всех измерений по оси Y и по оси X:
, полученных с использованием всех измерений по оси Y и по оси X:

Таким образом, существенное отличие заявляемого способа по сравнению с прототипом состоит в другом способе определения k - отношения чувствительностей приемников компаса по осям 0Х и 0Y, которое в прототипе выполняется по соотношению (3), а в заявляемом способе - (5).
Техническим результатом использования заявляемого способа является повышение точности калибровки магнитного компаса.
Заявляемый способ иллюстрируют следующие графические материалы:
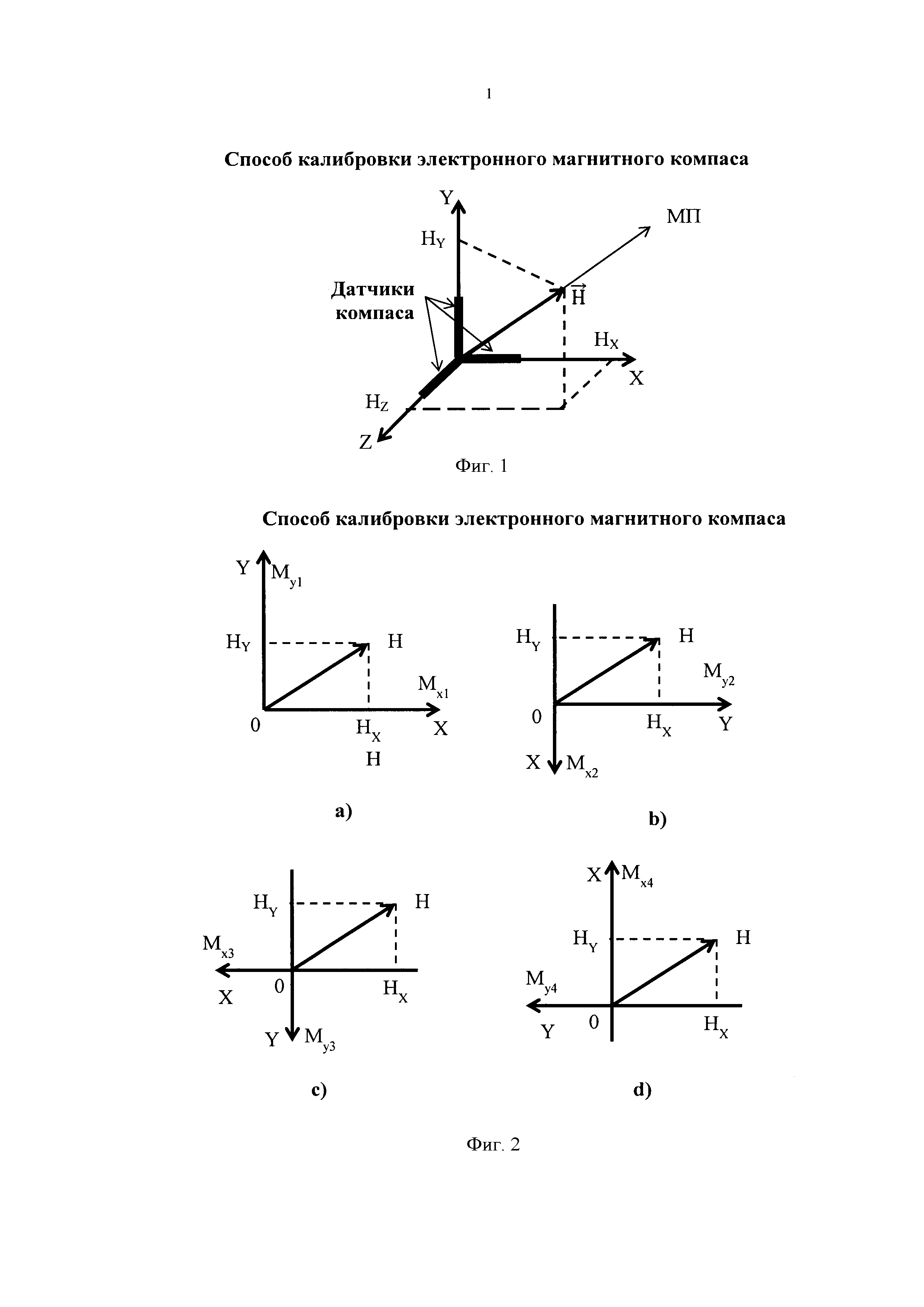
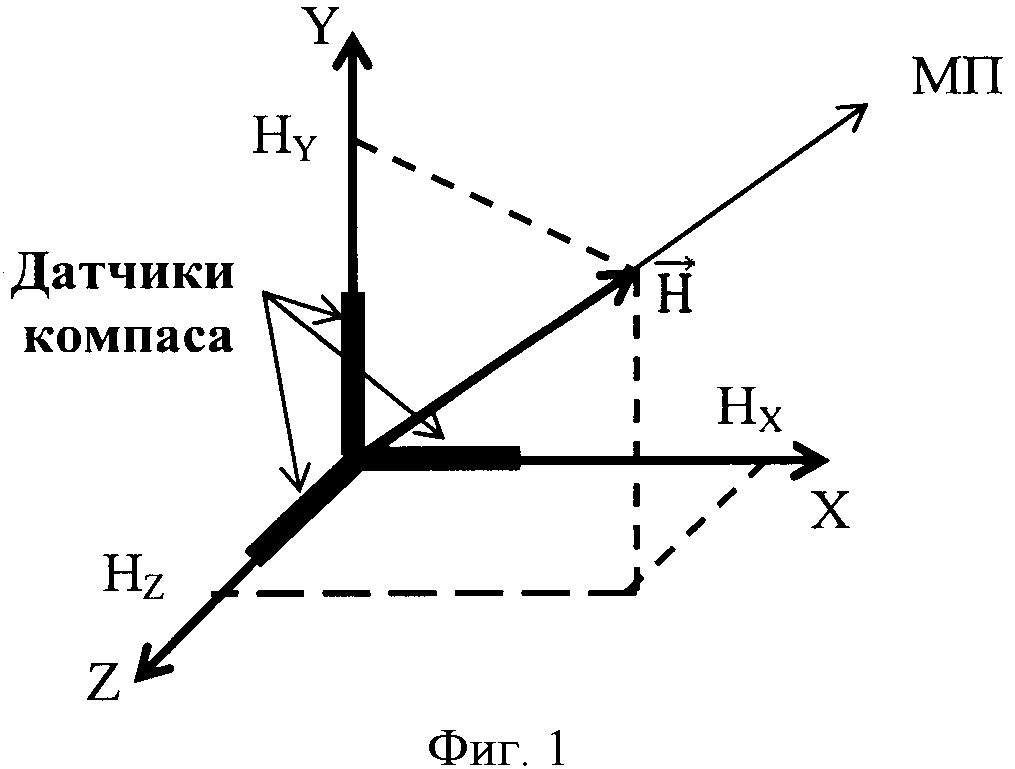
Фиг. 1. Проекции вектора магнитного поля на оси координат базиса 0XYZ.
Фиг. 2. Схемы калибровки магнитного компаса.
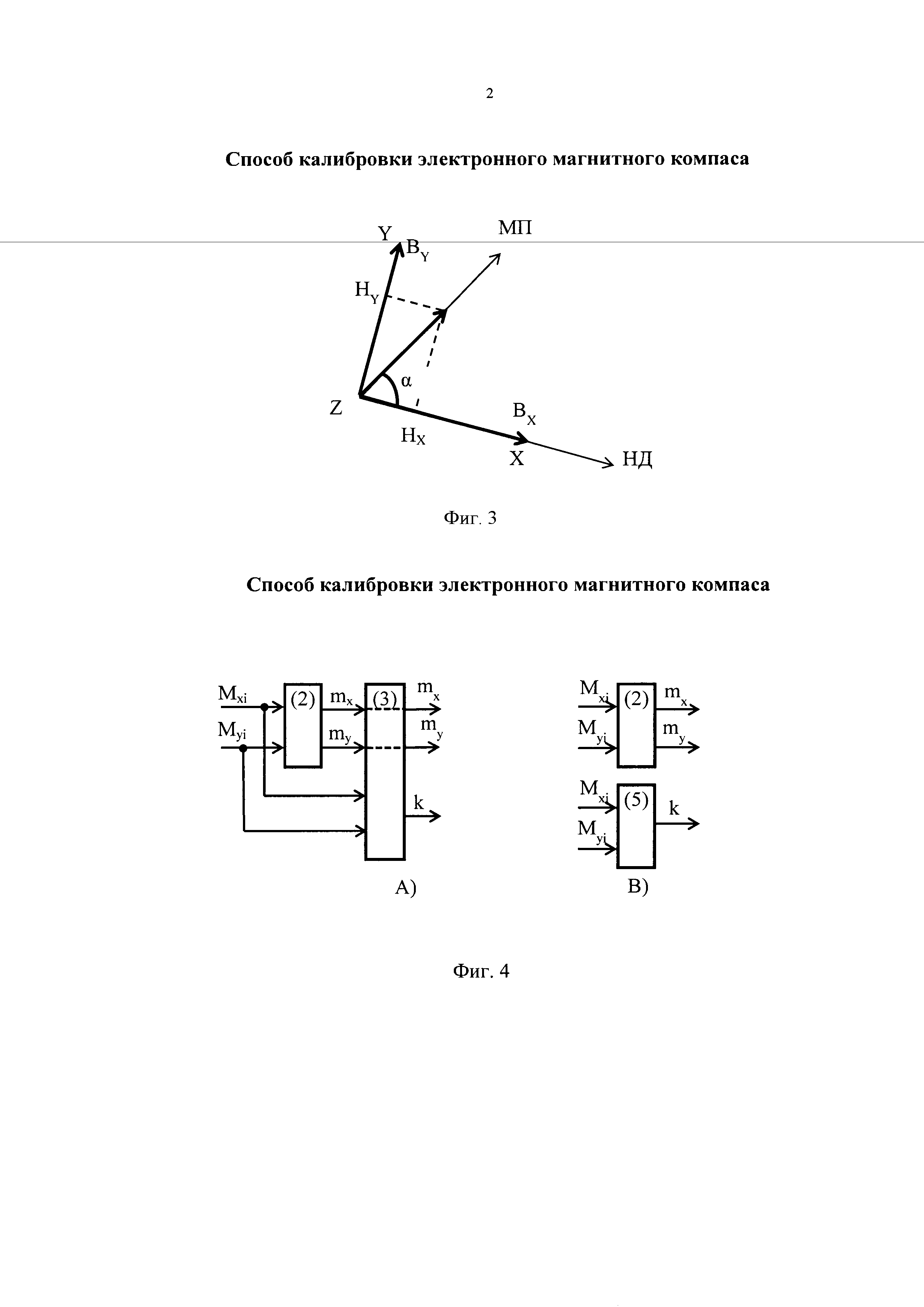
Фиг. 3. Проекции вектора магнитного поля при вычислении азимута α.
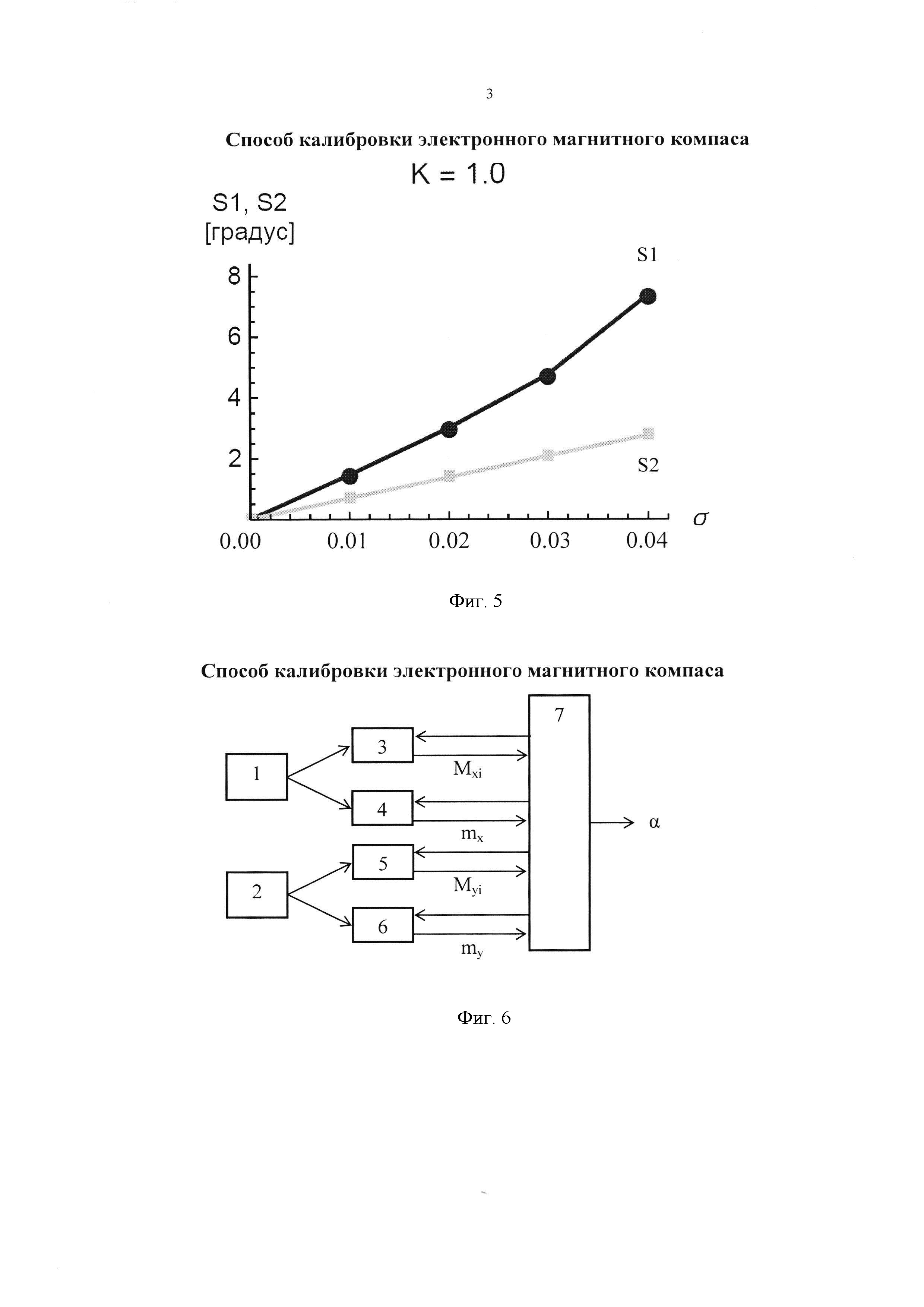
Фиг. 4. Схемы вычислений: А) - прототипа, В) - заявляемого способа.
Фиг. 5. Ошибки в измерениях азимута прототипа - S1 и заявляемого способа - S2.
Фиг. 6. Схема устройства, реализующего способ, где:
1, 2 - датчики поля;
3, 4, 5, 6 - интеграторы;
7 - компьютер.
Рассмотрим возможность реализации заявляемого способа калибровки электронного магнитного компаса при решении простейшей задачи: определения азимута движения при перемещении по поверхности Земли.
Датчики трехосного электронного магнитного компаса, фиг. 1, располагают ортогонально в базисе 0XYZ, а на корпусе компаса отображают направления соответствующих осей. Вектор магнитного поля направлен на магнитный полюс. Каждым из датчиков компаса принимают сигналы Mx, My и Mz, соответствующие проекциям HX, HY и HZ вектора , однако каждый канал принимает их со свойственными именно ему коэффициентом передачи k и статической ошибкой m:
Мх=kxHx+mx,
Му=kyHy+my,
Mz=kzHz+mz.
Будем полагать, что во время калибровки величина и направление вектора не меняются. Этот факт можно проверить путем многократного измерения и сравнения значений Мх, Му и Mz. Будем также считать, что в рассматриваемом случае проекция HZ не имеет существенного значения.
Устанавливают плоскость 0XY компаса параллельно поверхности Земли, фиг. 2, а).
Измеряют датчиками компаса средние значения магнитного поля Mx1 и My1 в первом положении. В простейшем случае среднее значение магнитного поля может быть получено в результате одного измерения. Однако действительная оценка среднего значения позволяет в определенной степени избавиться от флуктуаций магнитного поля, ошибок измерений и т.п. В аналоговом компасе для получения среднего значения производят интегрирование входных сигналов М за фиксированный интервал времени, а в цифровом - суммирование определенного количества входных отсчетов. В результате проведенных измерений получают усредненные величины:


Поворачивают компас на 90° во второе положение, фиг. 2, b), и аналогичным образом измеряют средние значения компонентов магнитного поля:


Следующий поворот компаса, фиг. 2, с), даст третье положение и значения:


Наконец, четвертое положение (поворот на 90°), Фиг. 2, d), позволит получить:


Одновременно с измерением средних значений магнитного поля по осям чувствительности 0Х и 0Y в каждом из положений компаса измеряют средние координатные значения поля по всем положениям компаса. Для чего интегрируют координатные показания компаса, полученные по четырем этапам калибровки в аналоговом варианте, или суммируют - в цифровом. Сложив соотношения (6), (8), (10) и (12), а также (7), (9), (11) и (13) по каждой из осей 0Х и 0Y, нетрудно убедиться, что средние значения магнитного поля по всем положениям компаса являются статическими ошибками компаса mx и my по каждой оси соответственно, см. соотношение (2).
Чувствительная ось магнитометра 0Х в первом, фиг. 2, а), и в третьем, фиг. 2, с), положениях направлена противоположно. Следовательно, если вычесть (10) из (6) и усреднить, то удается исключить статическую ошибку mx компаса по оси 0Х, а также получить проекцию вектора на ось 0Х при указанных ее положениях:
(Мх1-Mx3)/2=kxHx.
Если вычесть и усреднить четные измерения по оси 0Х, фиг. 2 b) и d), то получим проекцию вектора на ось 0Х при ее ортогональном положении:
(Мх2-Mx4)/2=-kxHy.
Зная проекции вектора на ось 0Х при ее двух ортогональных положениях, по теореме Пифагора найдем модуль вектора , полученный с использованием только оси чувствительности магнитометра - 0Х:

Аналогичным образом может быть получен модуль вектора , полученный с использованием только оси чувствительности магнитометра 0Y:

Модуль Н вектора , полученный выражениями (14) и (15), один и тот же. Следовательно, разделив (15) на (14), получим соотношение (5), которое позволяет оценить k - отношение чувствительностей приемников компаса по осям 0Х и 0Y, причем сами значения коэффициентов чувствительности kx и ky не требуются.
Результаты калибровки используются следующим образом. Если ось 0Х компаса, Фиг. 3, совместить с направлением движения (НД) объекта и измерить составляющие магнитного поля Bx и By, то азимут - угол α между осью 0Х и направлением на магнитный полюс, может быть рассчитан по формуле (4). Смысл этой формулы очевиден, т.к. предполагает коррекцию результатов измерений Вх и Ву на величины статической ошибки mx и my, а затем нормирование результатов измерений с использованием k - отношения чувствительностей приемников компаса по осям 0Y и 0Х.
Рассмотрим более подробно преимущества заявляемого способа калибровки электронного магнитного компаса по сравнению с прототипом [5], понимая, что любые измерения сопровождаются инструментальными, методическими и другими ошибками ε, в том числе и измерения составляющих магнитного поля М (В) магнитометром по осям чувствительности:
M=kH+m+ε.
Как было отмечено выше, основным отличием способа прототипа от заявляемого являются разные соотношения (3) и (5), использующиеся при оценке отношения чувствительностей приемников магнитного компаса k.
Преимущества заявляемого способа рассмотрим на трех уровнях:
- интуитивном;
- математическом;
- вероятностно-статистическом.
Интуитивно понятно, что схема вычисления прототипа, фиг. 4 А), предполагает на первом этапе определение статических ошибок mx и my, используя соотношение (2), а на втором - оценку отношения чувствительности каналов магнитного компаса k, используя (3). Таким образом, ошибки в измерениях магнитного поля М переходят в ошибки статических ошибок mx и my, а в результате отношение чувствительностей каналов магнитного компаса k оценивается с двойными ошибками.
В заявляемом способе, фиг. 4 В), указанные величины с использованием соотношений (2) и (5) определяются независимо, что должно уменьшить ошибки.
В математическом плане в прототипе [5] при вычислениях по соотношению (3) при «неудачной» ориентации компаса при калибровке (близость осей 0Х или 0Y с проекцией вектора магнитного поля на эту плоскость) может привести к нулевому значению знаменателя в одной из дробей (3), что делает невозможным определить k - отношение чувствительностей приемников компаса по осям 0Х и 0Y.
В заявляемом способе такой проблемы нет.
С вероятностно-статистической точки зрения получить подтверждение более высокой точности калибровки заявляемого способа по сравнению с прототипом при наличии случайных ошибок ε аналитическими методами не представляется возможным из-за проблем с оценкой вероятностных характеристик сложных математических соотношений (2-5). В этих условиях для доказательства преимуществ заявляемого способа использовалось имитационное моделирование методом Монте-Карло. При этом предполагалось, что измерения магнитного поля М сопровождаются случайными ошибками ε с нулевым математическим ожиданием, среднеквадратическим отклонением σ и нормальным законом распределения. Конечным результатом калибровки является истинное направление - α (4) на магнитный полюс в плоскости X0Y, по отношению к которому проводилась оценка. Моделирование проводилось путем генерации 100000 реализаций измерений М при среднеквадратическом отклонении σ случайной погрешности измерений ε относительно величины М от σ=0.01 до σ=0.04 (соответствует значениям 1%-4%, свойственным современным прецизионным магнитным компасам), kx=1, ky=0.8-1.2 для широкого диапазона значений углов установки компаса в горизонтальной плоскости при калибровке и азимута α движения носителя компаса.
В результате моделирования установлено, что использование заявляемого способа калибровки обеспечивает равномерно более высокую точность определения азимута α по сравнению с прототипом. На фиг. 5 в качестве примера представлены типовые графики усредненных по 100000 реализациям среднеквадратических ошибок S1 и S2 определения азимута α с использованием прототипа (S1) и заявляемого способа (S2). Видно, что S2 равномерно меньше S1.
Схема устройства, реализующего заявляемый способ, приведена на Фиг. 6. Сигналы от датчиков 1 (2) магнитного поля по осям X (Y) поступают на интеграторы 3 и 4 (5 и 6) соответственно. Интегратор 3 (5) определяет среднее значение поля в каждом положении компаса, а интегратор 4 (6) - по всем четырем измерениям. Начало и конец интегрирования задает управляющими сигналами компьютер 7. Последний сохраняет значения Mxi, Myi, mx и my, а также вычисляет по формуле (5) k - степень инструментальной асимметрии коэффициентов передачи kx и ky приемников компаса по осям X и Y. После калибровки компас готов к работе. При решении навигационных задач, Фиг. 4, направляют ось X компаса по направлению движения, измеряют составляющие магнитного поля Вх и Ву, а компьютер 7 рассчитывает азимут α по формуле (4).
Таким образом, заявляемый способ позволяет выполнить калибровку электронного магнитного компаса в одной плоскости простыми средствами: как по технической реализации, так и по алгоритмам вычисления.
Источники информации
1. Richard В. Langley. Магнитный компас и система GPS, http://www.travelling.lv/ru/snarjaga/kompas/compas_gps//.
2. Патент WO 2013188776.
3. Патент RU 2503923.
4. Патент RU 2497139.
5. Патент RU 2572109.




Способ высокоскоростного ультразвукового контроля рельсов
Переносный робототехнический комплекс огневой поддержки и боевого обеспечения
Способ корректировки огня артиллерии с использованием мультикоптера
Способ определения координат наземных объектов при фотосъёмке с беспилотного летательного аппарата
Система портативных комплектов для автоматизированного целеуказания на поле боя
Переносный робототехнический комплекс огневой поддержки и боевого обеспечения
Способ корректировки огня артиллерии с использованием мультикоптера
Способ определения координат наземных объектов при фотосъёмке с беспилотного летательного аппарата

