Результат интеллектуальной деятельности: МОРСКАЯ ПОЛУПОГРУЖНАЯ ВЕРТОЛЕТНАЯ ПЛАТФОРМА
Вид РИД
Изобретение
Заявляемое изобретение относится к области судостроения, а более конкретно к созданию плавучих объектов, оснащаемых взлетно-посадочными площадками для вертолетов и предусматривающих возможность их использования в качестве плавучих вертодромов.
Широкое использование вертолетов для перевозки людей и грузов является характерной чертой морского сектора нефтегазодобывающей промышленности. Увеличивающийся объем перевозок вызывает не только совершенствование технических средств, непосредственно обеспечивающих возможность и безопасность полетов вертолетов на морские сооружения, но и стимулирует появление принципиально новых типов морских плавучих объектов.
Известен проект вертолетной базы для оффшорных работ (Offshore Accommodation Helicopter Base) под названием «Camelot», представленный компанией Intership Ltd., (http://www.barges.com). В конструктивном плане данный объект представляет собой прямоугольную в плане баржу, на верхней палубе которой размещаются жилой блок вместимостью до 1000 человек, большая рабочая площадка с перемещающимся по ней гусеничным краном и шесть взлетно-посадочных площадок (ВПП) для вертолетов - три в носу и три в корме баржи.
Несмотря на заявленные широкие возможности по использованию баржи в качестве базы для обеспечения разнообразных морских работ, эксплуатационные характеристики баржи существенно ограничиваются морским волнением. В условиях сильного волнения или зыби баржа и, соответственно, ВПП имеют значительные угловые и линейные перемещения, что становится препятствием для посадки и взлета вертолетов. Возможность разворота баржи носом или кормой навстречу ветру и волнам, что позволило бы в определенной мере уменьшить эти перемещения, отсутствует или крайне ограничена, поскольку для удержания баржи в ее носовой и кормовой оконечностях предусмотрены традиционные якорные устройства. Надежность удержания баржи не должна зависеть от направлений ветра и бега волн, поэтому якорные линии данных устройств раскладываются более-менее равномерно вокруг баржи. При этом якорные линии, будучи зафиксированы на якорных лебедках по углам баржи, препятствуют ее развороту.
Разворот плавучего средства в наиболее выгодное положение по отношению к направлению ветра и волн может быть реализован за счет применения специального швартовного устройства, включающего в свой состав якорную систему, якорные связи которой прикреплены к швартовному бую, размещаемому внутри корпуса плавсредства с возможностью вращения относительно него. Наиболее широкое применение данные устройства получили на судах для добычи, хранения и отгрузки углеводородов, обозначаемых аббревиатурой FPSO (Floating production, storage and offloading). Особенностью швартовного устройства этих судов является то, что через вращающийся в их корпусе буй проходят трубопроводы, по которым на судно поступает добываемый из скважин продукт. Буй швартовного устройства размещается, как правило, в носовой половине корпуса судна и это обеспечивает судну, подобно флюгеру, автоматический разворот носом навстречу ветру и волнению. Применение данных швартовных устройств на судах FPSO в первую очередь обусловлено тем, что позволяет минимизировать действующие на них внешние нагрузки и, соответственно, упростить их якорные системы.
Подобные швартовные устройства запатентованы во всех ведущих странах, в частности имеется патент Российской Федерации №2167781, МПК 8 В63В 22/02 от 1991 г., заявитель "DEN NORSKE STATS OL'ESEL'SKAP AS", Норвегия.
Что касается характеристик качки плавсредств с указанными швартовными устройствами, то степень их улучшения в значительной мере зависит от конструктивного типа плавсредств. Из опыта судостроения известно, что наименьшую качку на морском волнении имеют полупогружные конструкции.
Известна морская полупогружная вертолетная платформа, содержащая верхний корпус с вертолетным комплексом, соединенный с нижними понтонами посредством стабилизирующих колонн и снабженный якорной системой удержания (см. патент Российской Федерации №2406643, МПК8 В63В 35/44 от 2009 г. - Прототип). Принятый в прототипе полупогружной тип корпуса, сутью которого является максимальная стабилизация на морском волнении за счет погружения глубоко под воду основных водоизмещающих объемов корпуса, обеспечивающих плавучесть сооружения, и минимизация поперечных размеров конструкций, пересекающих ватерлинию, обеспечивает морской полупогружной вертолетной платформе наименьшие параметры колебаний и позволяет производить посадку и взлет вертолетов при существенно более сильном волнении моря, чем при применении корпусов баржеобразного или судового типа. Удержание морской полупогружной вертолетной платформы в заданной точке моря обеспечивается якорной системой удержания, аналогичной применяемым на плавучих буровых платформах и других плавучих объектах, в том числе вертолетной базе «Camelot».
Недостатком морской полупогружной вертолетной платформы-прототипа является невозможность свободного управления ее положением относительно сторон света с целью создания наилучших условий для взлета и посадки вертолета с учетом существующего при этом направлении ветра (известно, что наилучшие условия для взлета и посадки соответствуют ситуации, при которой вертолет обращен носом к ветру). Кроме того, недостатком платформы-прототипа является высокая трудоемкость операций по повторной постановке на точку эксплуатации, если в силу форс-мажорных обстоятельств платформа должна была уйти с нее, полностью отдав, то есть вытравив за борт якорные связи. Данный недостаток может стать серьезным препятствием для использования платформы в тех районах северных морей, где высока вероятность воздействия на нее тяжелых плавучих льдов и айсбергов. Традиционная якорная система не сможет удержать платформу при таком воздействии. Чтобы предотвратить повреждение якорной системы и, что также не может быть исключено, самой платформы, контакт платформы с такими ледовыми образованиями должен быть предотвращен. Для таких условий эксплуатации необходим экстренный уход платформы с точки и возвращение на нее.
Техническим результатом заявляемого изобретения является расширение эксплуатационных возможностей морской полупогружной вертолетной платформы при повышении безопасности ее работы путем обеспечения оптимальных условий для посадки и взлета вертолетов.
Это достигается в морской полупогружной вертолетной платформе, содержащей верхний корпус с вертолетным комплексом, соединенный с нижними понтонами посредством стабилизирующих колонн и снабженный якорной системой удержания, отличающейся тем, что якорная система удержания включает в себя швартовный буй, интегрированный с турелью, к которой подсоединены якорные связи якорной системы удержания, смонтированной с возможностью взаимодействия с шахтой одной из стабилизирующих колонн платформы.
Это также достигается тем, что морская полупогружная вертолетная платформа снабжена движительными средствами с системой управления, корректирующей положение платформы относительно направления ветра в текущий момент, в частности при взлете и посадке вертолетов.
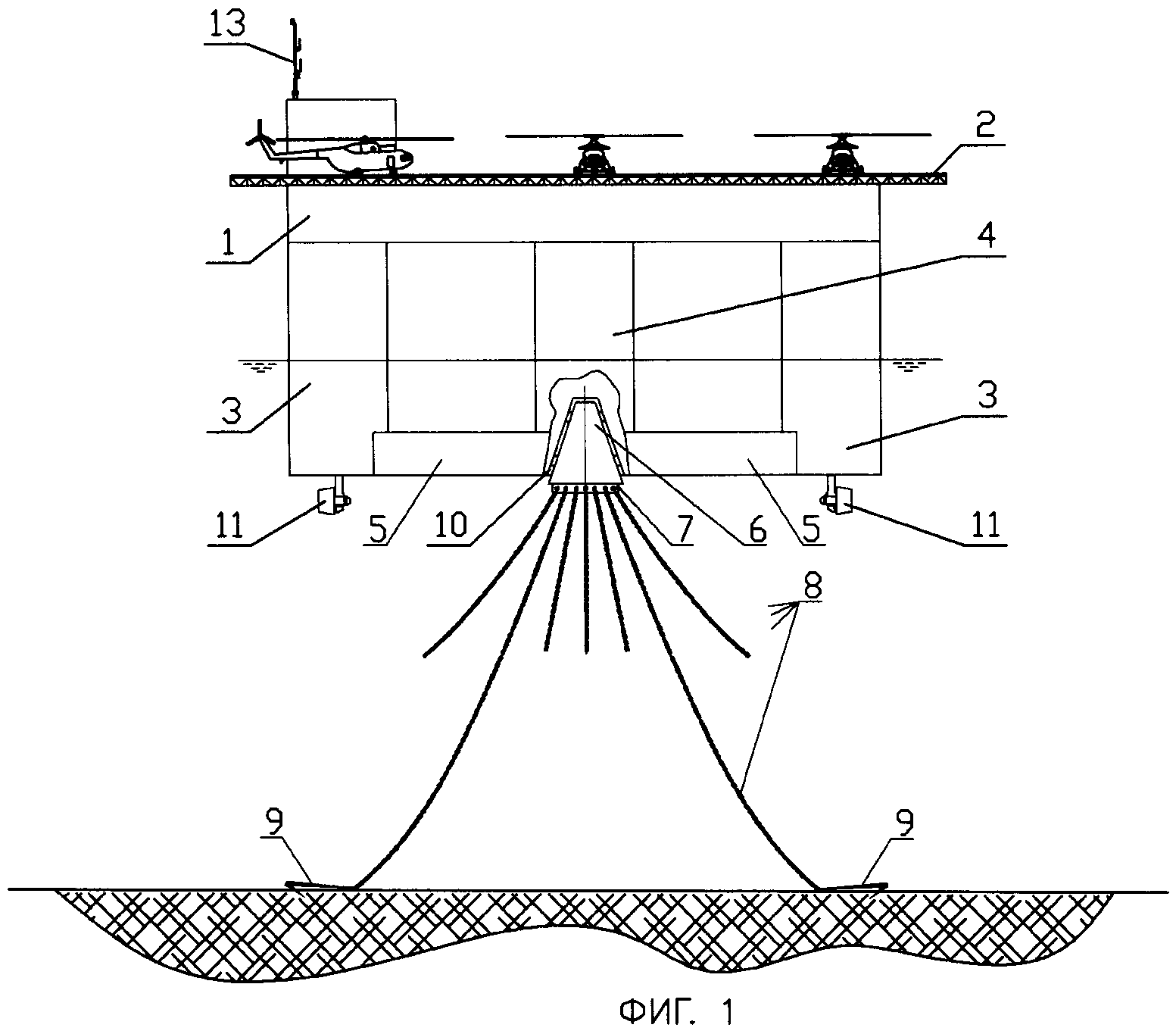
На фигуре 1 изображена заявляемая морская полупогружная вертолетная платформа, вид сбоку;
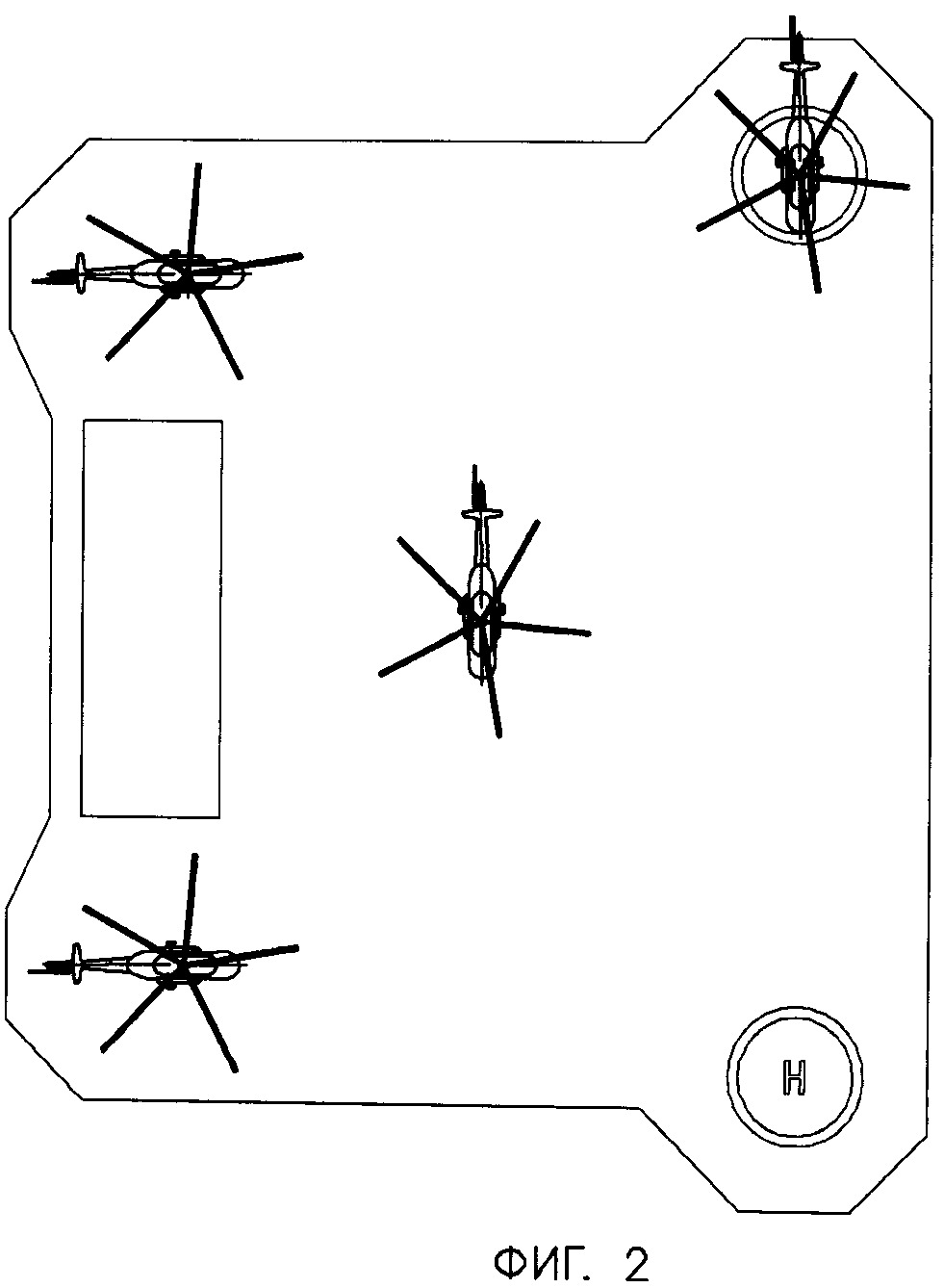
на фиг.2 - то же, вид в плане;
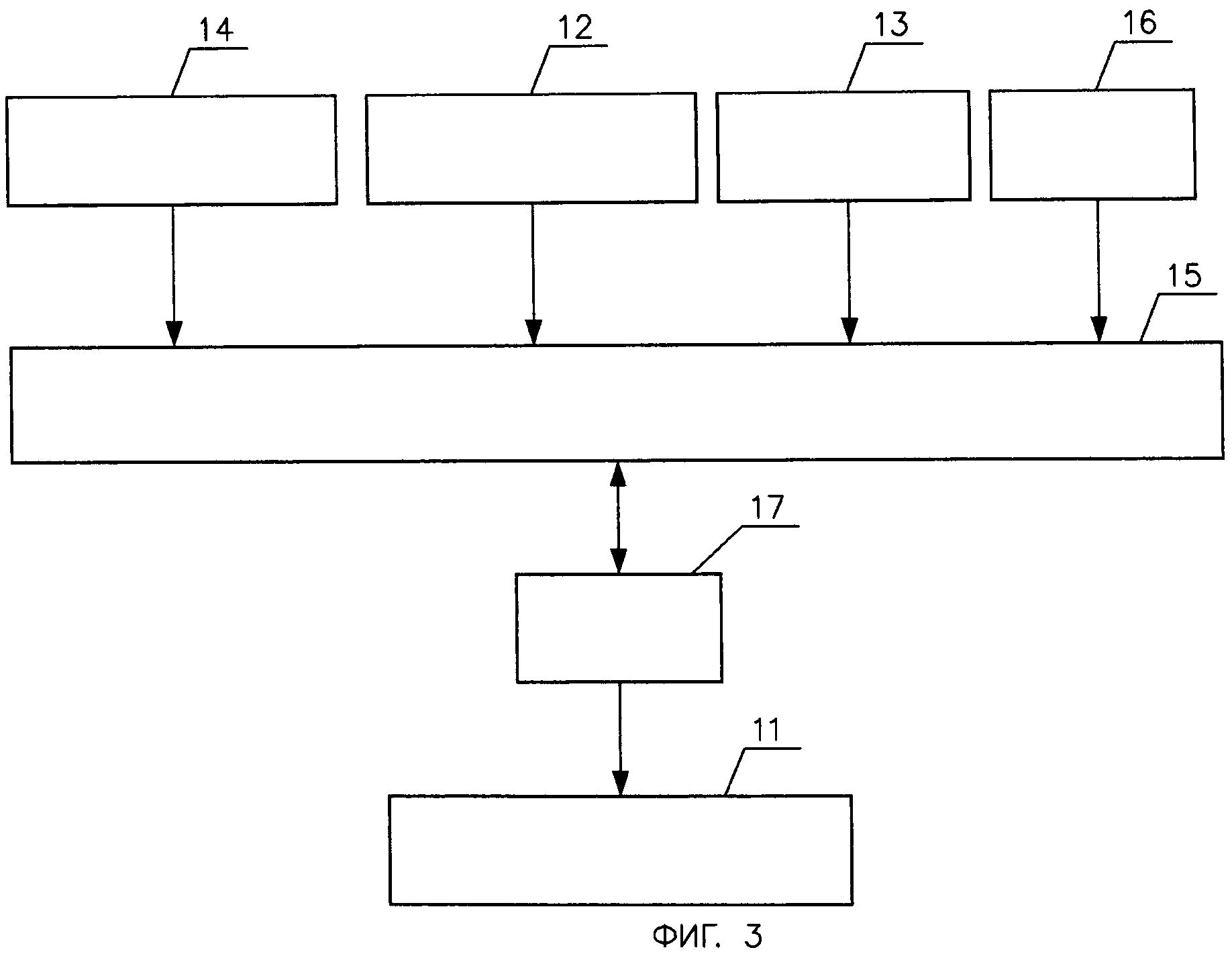
на фиг.3 - структурная схема системы управления движительными средствами заявляемой морской полупогружной вертолетной платформы.
Заявляемая морская полупогружная вертолетная платформа содержит верхний корпус 1 с вертолетным комплексом 2, опирающийся на стабилизирующие колонны 3 и 4, в нижней части соединенные понтонами 5. Заявляемая морская полупогружная платформа также снабжена якорной системой удержания в составе швартовного буя 6, интегрированного с турелью 7, подсоединенных к турели 7 якорных связей 8, а также якорей 9. Внутри одной из стабилизирующих колонн 4 предусмотрена шахта 10 для фиксирования швартовного буя 6.
Заявляемая морская полупогружная вертолетная платформа оснащена движительными средствами 11 с системой управления в составе блоков формирования алгоритма движения 12; датчиков внешних воздействий 13, систем определения местоположения 14 и курсового угла 15 платформы, джойстиковой системы управления 16, локальных систем управления 17 соответствующими движителями (не показаны) движительных средств 11, размещенных на днище стабилизирующих колонн 3. Швартовный буй 6 с турелью 7 и якорными связями 8 может быть размещен в шахте любой из стабилизирующих колонн платформы, под которой не смонтированы движительные средства 11. Оборудование блоков 12, систем определения местоположения 14 и курсового угла 15, джойстиковой системы управления 16 размещено в помещениях (не показаны) верхнего корпуса 1 платформы. Датчики внешних воздействий 13 размещены на открытых пространствах верхнего корпуса 1 и под водой (не показаны) вне понтонов 5 платформы. Локальные системы управления 17 размещены в помещениях (не показаны) соответствующих стабилизирующих колонн 3.
Эксплуатация заявляемой морской полупогружной вертолетной платформы осуществляется следующим образом. Вначале в заданной точке на дне моря устанавливается якорная система удержания платформы: якоря 9 с якорными связями 8 и швартовным буем 6, интегрированным с турелью 7. На данном этапе, до соединения с морской полупогружной вертолетной платформой, буй 6 находится под поверхностью воды на глубине, большей, чем осадка самой платформы, и большей, чем осадка ледовых образований, появление которых возможно в этом районе. Затем осуществляется соединение заявляемой платформы с якорной системой удержания: платформа ориентируется таким образом, чтобы шахта 10 оказалась над швартовным буем 6. С помощью вспомогательных средств (не показаны) швартовный буй 6 втягивается в шахту 10 и затем фиксируется внутри шахты 10. С данного момента удержание платформы в заданной точке обеспечивается в штатном режиме. Под действием внешних нагрузок и благодаря наличию турели 7 морская полупогружная вертолетная платформа поворачивается в такое положение, при котором действующие на нее нагрузки будут минимальны. Если данное положение не соответствует наилучшим условиям для взлета или посадки вертолета, задействуются движительные средства 11, система управления (фиг.3) которыми обеспечивает приведение платформы к требуемому курсовому углу и его поддержание в течение необходимого периода времени. Система управления непрерывно контролирует смещение платформы и при необходимости формирует управляющие воздействия в локальные системы управления 17 движительными средствами 11 для приведения платформы к требуемому курсовому углу и/или ее перемещения с целью исключения предельных смещений, при которых возникают недопустимые усилия в якорных связях 8. Контроль смещения платформы и формирование управляющих воздействий производится в блоках формирования алгоритма движения 12 на основании данных, получаемых от приборных средств (не показаны) систем определения местоположения 14 и курсового угла 15, а также расчетным путем на основании математической модели платформы, по данным, получаемым от датчиков внешних воздействий 13. Управление движительными средствами 11 осуществляется:
- в автоматическом режиме;
- в ручном режиме под управлением оператора с оборудования джойстиковой системы управления 16.
В форс-мажорных обстоятельствах, требующих осуществить экстренный уход морской полупогружной вертолетной платформы с точки удержания, например при приближении айсберга, производится освобождение и опускание швартовного буя 6 из шахты 10. После этого за счет использования собственных движительных средств 11 и, при необходимости, буксирного судна (не показано) платформа уходит в безопасный район. После нормализации ситуации платформа возвращается, вновь соединяется с системой удержания и продолжает работу по своему назначению.
Технико-экономическим преимуществом заявляемого изобретения является расширение эксплуатационных возможностей морской полупогружной вертолетной платформы при повышении безопасности ее работы путем обеспечения оптимальных условий для посадки и взлета вертолетов.
Морская плавучая платформа
Подводная буровая установка
Самоподъемная буровая установка
Подводный буровой комплекс
Система хранения и погрузки-разгрузки труб
Система защиты информации от несанкционированного доступа к информации, содержащей сведения, составляющие государственную тайну
Комплект персонального навигационного оборудования для маломерных судовых плавсредств
Аварийно-сигнальный буй для применения в ледовых условиях
Устройство для всплытия подводной лодки в ледовых условиях
Способ форсирования ледяного поля всплывающим подводным объектом и устройство форсирования ледяного поля
Подводная буровая установка
Самоподъемная буровая установка
Подводный буровой комплекс
Система хранения и погрузки-разгрузки труб
Система защиты информации от несанкционированного доступа к информации, содержащей сведения, составляющие государственную тайну
Комплект персонального навигационного оборудования для маломерных судовых плавсредств
Аварийно-сигнальный буй для применения в ледовых условиях
Устройство для всплытия подводной лодки в ледовых условиях
Способ форсирования ледяного поля всплывающим подводным объектом и устройство форсирования ледяного поля
Способ проведения испытаний на всплытие модели морского инженерного погруженного сооружения в ледовом опытовом бассейне и устройство для испытаний на всплытие модели

