Результат интеллектуальной деятельности: Электромагнитный захватный агрегатный модуль
Вид РИД
Изобретение
Предлагаемое устройство относится к области машиностроения, роботостроения и может применяться при захвате и транспортировке изделий электромагнитными захватами. Наиболее эффективной областью применения является работа с плоскими листовыми изделиями.
В современном автоматизированном производстве цикловые промышленные роботы, работающие с использованием электромагнитных захватов, выполнение функции «взять» изделие осуществляют следующим образом. Из центральной системы управления поступает команда на опускание захвата в направлении изделия. Соответствующим приводом перемещается захват в направлении изделия. При достижении заданного положения срабатывает датчик, информационный сигнал с которого поступает в центральную систему управления. Затем подается команда на захват изделия и включается электромагнитный захват. С задержкой времени далее из центральной системы управления подается команда на выполнение функции подъема электромагнитного захвата с изделием.
Известно устройство контроля захвата листовой заготовки рукой промышленного робота (см. №925624, кл. B25J 15/00, бюл. №17, 07.05.1982). Конструктивное исполнение устройства обеспечивает требуемую работу по захвату листовой детали за счет применения бесконтактного магнитоуправляемого датчика наличия заготовки, закрепленного на захвате руки промышленного робота, соединенного с системой управления. При этом настройка датчика информационных сигналов с помощью микрометрических винтов относительно плоскости захвата листовой заготовки приводит к сложности конструкции. Недостатком данного устройства является большое количество управляющих сигналов и отсутствие контроля наличия изделия.
Известно устройство (см. патент №1440708, кл. B25J 15/06, 1987, Дудкин Н.В., Поляков В.В.), выполненное из электромагнитного захвата, содержащее П-образный магнитопровод и катушку возбуждения с сердечником, установленным с возможностью осевого перемещения, датчик момента касания наличия детали в захвате и наконечника. Конструктивное исполнение устройство позволяет осуществлять контроль захвата изделия.
Однако осуществление работы электромагнитного захвата выполняется за счет аппаратуры коммутации, которая снижает надежность и быстродействие работы захвата.
Известно устройство (см. патент №116086, «Электромагнитный захватный агрегатный модуль», МПК B25J 15/06, опубл. 28.05.2012 г., бюл. №14, Сысоев C.H., Черкасов Ю.В., Претека Н.В., Шабаев В.Α.), содержащее электромагнитный захват, выполненный в виде П-образного магнитопровода, на разных полюсах которого расположены первичная и вторичная обмотки, электромагнитный захват закреплен на подвижном рабочем органе привода его подъема и опускания, выполненном в виде соленоида, якорь которого подпружинен в сторону выталкивания, а силовая обмотка соединена через ключ с источником питания и через выключатель с вторичной обмоткой электромагнитного захвата. Данное устройство обладает простотой конструкции, повышенным быстродействием, адаптацией к требуемому ходу электромагнитного захвата. Кроме этого упрощается система управления путем сокращения сигналов управления.
Однако использование соленоида в качестве приводного механизма ограничивает ход перемещения электромагнитного захвата и таким образом ограничивает область применения устройства в целом. Кроме этого устройством не реализуется функция установки изделия на рабочую поверхность. Данные недостатки ограничивают область его применения.
Наиболее близким по технической сущности из известных является устройство (см. патент №147227, «Электромагнитный захватный агрегатный модуль», МПК B25J 15/06, опубл. 27.10.2014 г., бюл. №30, Сысоев C.H., Черкасов Ю.В., Претека Н.В., Кочеровский A.M.), содержащее электромагнитный захват, закрепленный на подвижном рабочем органе его перемещения. Электромагнитный захват, выполненный в виде П-образного магнитопровода, на разных полюсах которого расположены первичная и вторичная обмотки, причем первичная обмотка соединена с энергопитанием переменного электрического тока, а вторичная обмотка соединена с энергопитанием привода подъема захвата. Привод включает электродвигатель постоянного тока, силовая обмотка которого соединена с первичной и вторичной обмотками через выпрямители и разделительные диоды, организующие разнополярное питание электродвигателя.
Область применения данного устройства расширяется за счет применения электродвигателя, позволяющего увеличить ход перемещения электромагнитного захвата. Однако устройством не реализуется функция установки изделия на рабочую поверхность.
Таким образом, данное устройство и все известные имеют ограниченную область применения.
Задачей изобретения является расширение области применения устройства путем обеспечения выполнения функции установки изделия на рабочую поверхность.
Поставленная задача достигается тем, что в электромагнитном захватном агрегатном модуле, включающем электромагнитный захват, выполненный с возможностью взаимодействия с захватываемым изделием, установленным на рабочей поверхности, закрепленный на подвижном рабочем органе привода его подъема и опускания, и выполненный в виде П-образного магнитопровода, на разных полюсах которого расположены первичная и вторичная обмотки, причем первичная обмотка соединена с энергопитанием переменного электрического тока, а вторичная обмотка соединена с энергопитанием электродвигателя постоянного тока привода перемещения захвата, силовая обмотка которого соединена с первичной и вторичной обмотками через выпрямители и разделительные диоды, организующие разнополярное питание электродвигателя, дополнительно установлен переключатель, выполненный с возможностью смены полярности энергопитания электродвигателя перед началом функционирования устройства, а на захвате закреплен механизм отведения П-образного магнитопровода от изделия при установке его на рабочую поверхность.
Электромагнитный захватный агрегатный модуль может быть выполнен с механизмом отведения П-образного магнитопровода от изделия, который содержит по меньшей мере, один рычаг, установленный с возможностью силового воздействия на поверхность изделия и выполненный с рабочей частью, выступающей за пределы размеров изделия, направленной в сторону рабочей поверхности с возможностью взаимодействия с ней при установке захваченного изделия, и не взаимодействия с рабочей поверхностью при осуществлении захвата изделия.
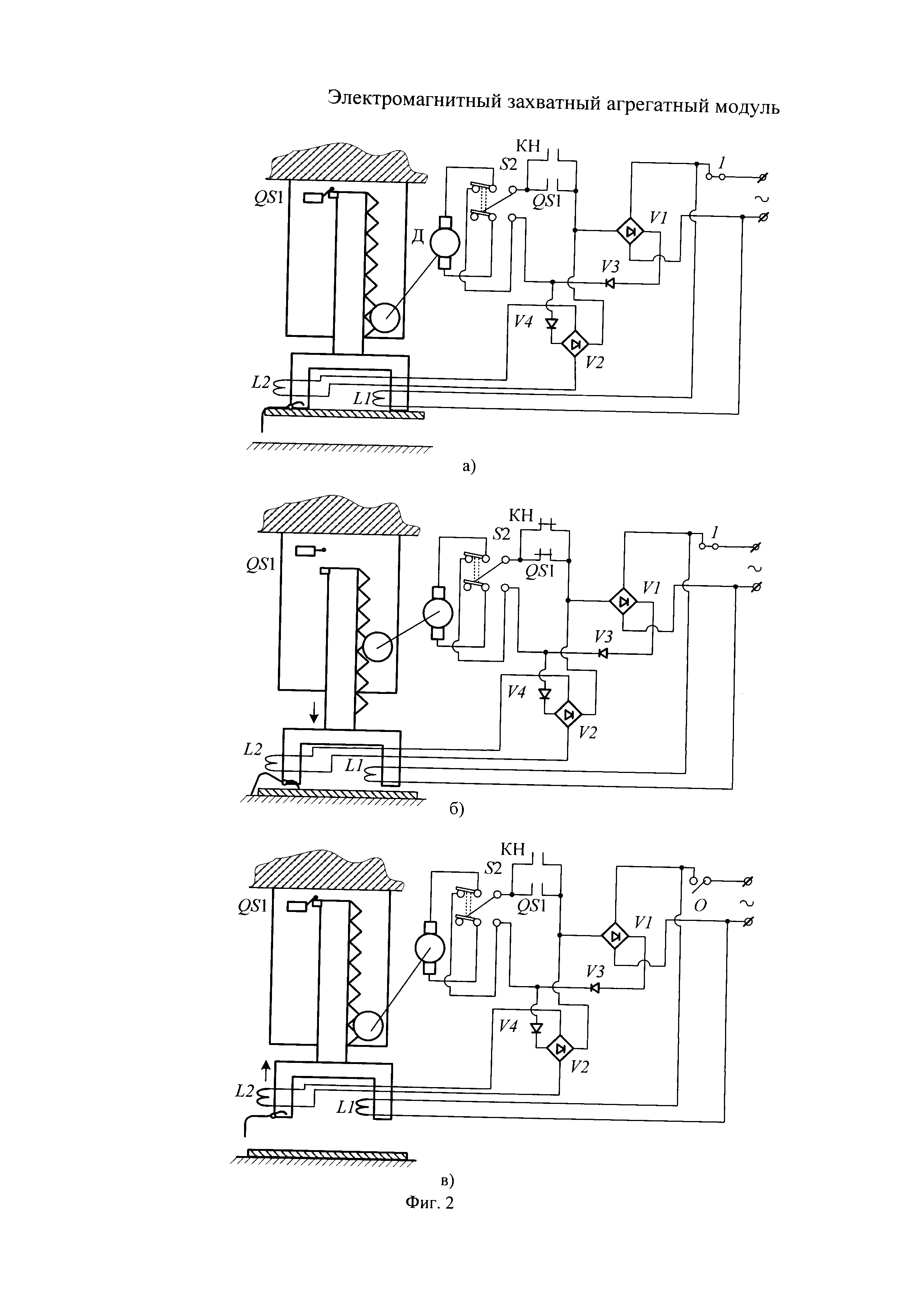
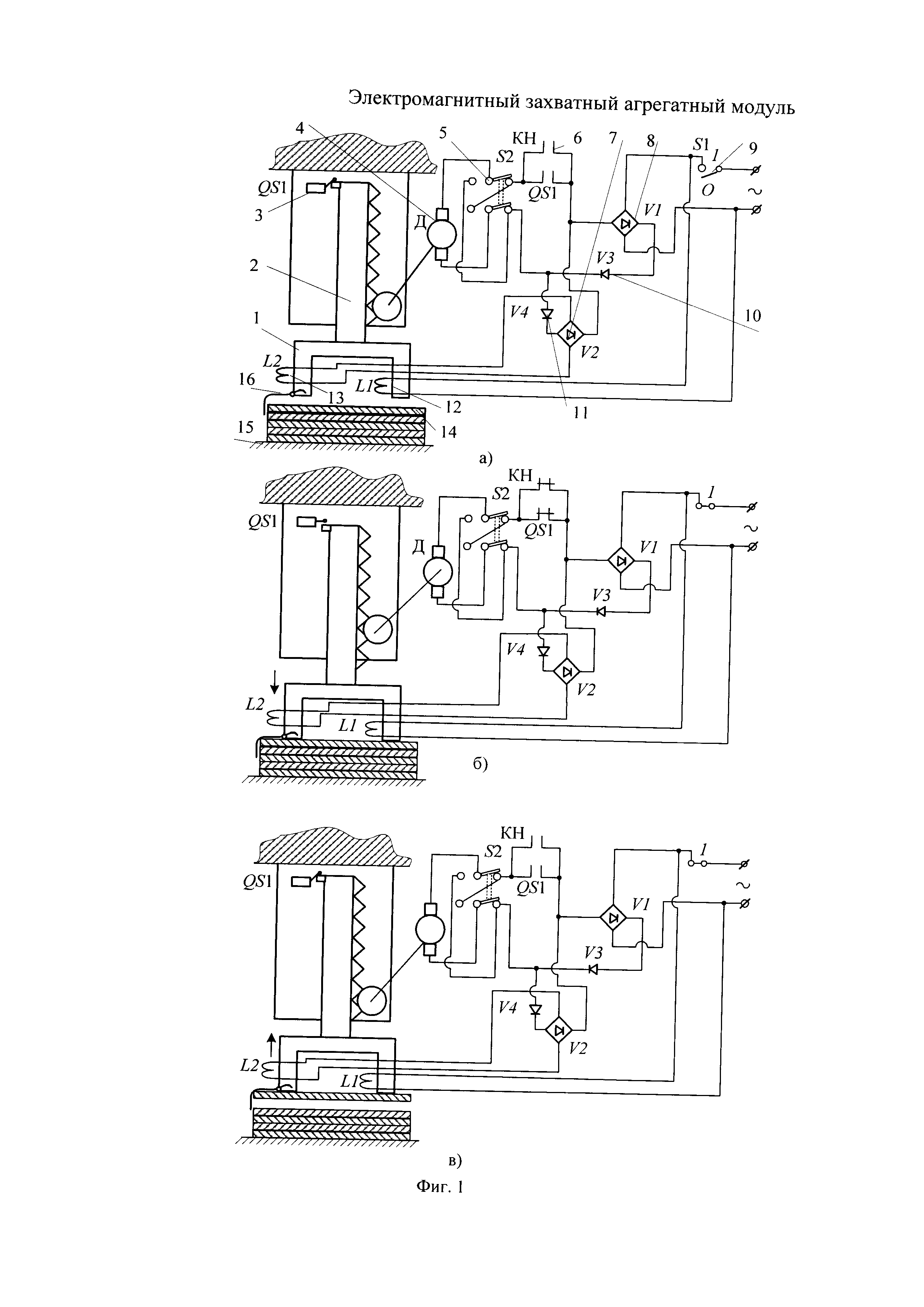
Пример реализации предлагаемого устройства показан на чертежах (фиг. 1 и 2). На фиг. 1, поз. а, б, в показаны этапы работы устройства при выполнении им функции «взять» изделие. На фиг. 2, поз. а, б, в показаны этапы работы устройства при выполнении им функции «установить» изделие на рабочую поверхность.
Электромагнитный захватный агрегатный модуль представляет собой устройство агрегатно-модульного типа, состоящее из системы двух приводов: электромагнитного захвата и привода его подъема и опускания, включающего электродвигатель постоянного тока.
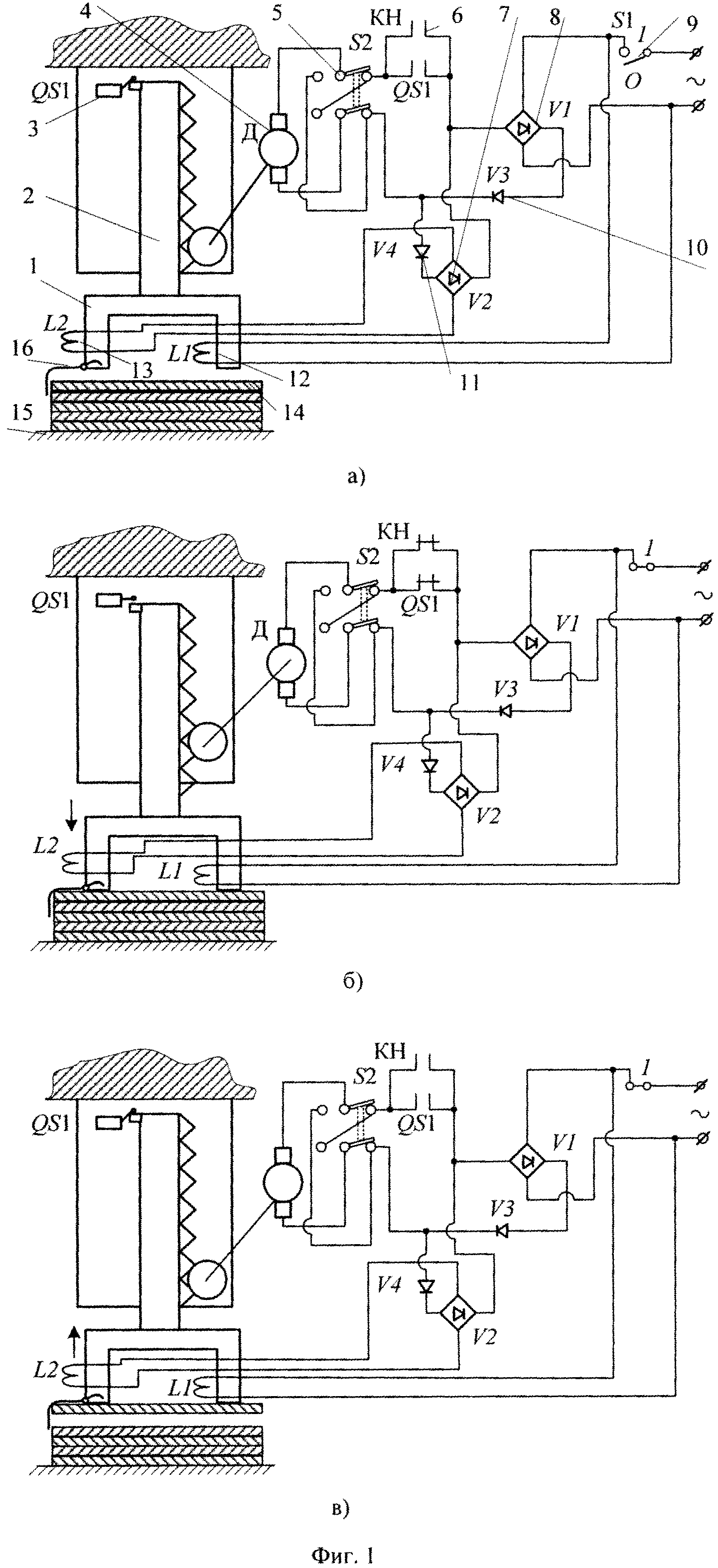
Устройство состоит (фиг. 1, поз. а) из электромагнитного захвата 1, закрепленного на подвижном рабочем органе 2 с нормально замкнутым датчиком 3 верхнего конечного положения. Выходной вал электродвигателя 4 соединен с подвижным рабочим органом через передачу шестерня-рейка. Силовая обмотка электродвигателя соединена с энергопотреблением через переключатель изменения полярности 5, кнопку 6, выпрямители 7 и 8, ключ 9, разделительные диоды 10 и 11. Электромагнитный захват выполнен в виде П-образного магнитопровода, на разных концах которого расположены первичная 12 и вторичная 13 обмотки, с функцией повышающего трансформатора при замыкании магнитопровода верхним изделием 14 из стопы, расположенной на рабочей поверхности 15. На электромагнитном захвате закреплен механизм отведения П-образного магнитопровода от изделия при установке его на рабочую поверхность, выполненный в виде рычага 16.
Электромагнитный захватный агрегатный модуль работает следующим образом. Этапы работы устройства показаны на фиг. 1 и 2.
В исходном положении, когда устройство расположено над стопой изделий, верхнее из которых необходимо взять (фиг. 1, поз. а), электромагнитный захват занимает крайнее верхнее положение, при котором включен датчик 3. Ключ 9 - в положении 0 и энергопитание отключено.
Перед началом работы переключатель 5 установлен в положении, соответствующем перемещению электромагнитного захвата вниз.
При подаче команды «взять» изделие 14 (фиг. 1, поз. б) ключ 9 и кнопку 6 замыкают. При этом появляется энергопитание переменного тока на первичной обмотке 12 и через выпрямитель 8 и диод 10 энергопитание постоянного тока на силовой обмотке электродвигателя 4. Выполняется процесс опускания подвижного рабочего органа 2 и срабатывает датчик 3, замыкаются его контакты. После этого кнопку 6 отпускают.
При подходе к изделию и касании торцевых поверхностей П-образного магнитопровода изделие 14 замыкает магнитное поле на концах магнитопровода. Выполняется функция захвата изделия. Во вторичной обмотке возникает электрическое напряжение большей величины, чем в первичной.
Электрическое питание со вторичной обмотки 13 подается на силовую обмотку электродвигателя через выпрямитель 7 и диод 11. Причем энергопитание электродвигателю подается в полярности, противоположной первоначальному, так как диод 10 запирается более высоким напряжением с выпрямителя 7. Это приводит к торможению ротора электродвигателя и реверсированию направления его вращения. Выполняется функция подъема изделия перемещением подвижного рабочего органа вверх.
При достижении крайнего верхнего положения (фиг. 1, поз. в) включается датчик 3, отключая энергопитание электродвигателя. Останавливается подвижный рабочий орган, и функция опускания, захвата и подъема изделия заканчивается.
Изделие транспортируют в требуемом направлении. После транспортировки изделия перед выполнением устройством функции «установить» изделие на рабочую поверхность изменяют положение переключателя 5 (фиг. 2, поз. а) и он начинает работать в режиме, соответствующем при подаче питания на электродвигатель перемещению электромагнитного захвата вверх.
При подаче команды «установить» изделие на рабочую поверхность (фиг. 2, поз. б) замыкают кнопку 6. При этом появляется энергопитание электродвигателе и П-образный захват с изделием перемещается в направлении рабочей поверхности. Замыкается контакт QS1 датчика 3. Размыкают кнопку 6 (КН), но перемещение электромагнитного захвата продолжается. Силовое взаимодействие рычага с рабочей поверхностью приводит к тому, что он отводит изделие от электромагнитного захвата. Размыкается магнитопровод и электродвигатель перемещает электромагнитный захват вверх, то есть последовательно выполняются функции отпускания изделия и подъема захвата. В верхнем положении электромагнитного захвата размыкается контакт QS1 и отключается энергопитание электродвигателя. Функция «установить» изделие на рабочую поверхность выполнена.
Таким образом, данное устройство расширяет области применения устройства выполнением дополнительной функции установки изделия на рабочую поверхность путем последовательной реализации операций опускания, отпускания изделия и подъема электромагнитного захвата.
При этом обеспечивается высокое быстродействие за счет одного сигнала управления на выполнение функции «взять» изделие и одного сигнала управления на выполнение функции «установить» изделие. Также реализуется автоматическое выполнение требуемой величины хода электромагнитного захвата, возможность контроля выполнения функций. Если изделие по какой-то причине не будет захвачено или установлено, то электромагнитный захват не займет свое крайнее верхнее положение.
В лаборатории автоматизации технологических процессов Владимирского государственного университета имени Александра Григорьевича и Николая Григорьевича Столетовых создан макет электромагнитного захватного агрегатного модуля, натурные испытания которого показали его работоспособность и эффективность.
Способ управления перемещением штока камерного привода
Датчик крутильных колебаний
Цилиндро-поршневая группа
Мембранный привод
Захватный корректирующий модуль
Способ формирования металлуглеродных комплексов на основе наночастиц шунгита, золота и серебра
Состав для получения огнестойкого покрытия
Состав для диэлектрической полимерной композиции
Захватный корректирующий модуль
Движитель транспортного средства с повышенной проходимостью (дтсспп)
Способ управления перемещением штока камерного привода
Датчик крутильных колебаний
Цилиндро-поршневая группа
Мембранный привод
Захватный корректирующий модуль
Способ формирования металлуглеродных комплексов на основе наночастиц шунгита, золота и серебра
Состав для получения огнестойкого покрытия
Состав для диэлектрической полимерной композиции
Захватный корректирующий модуль
Движитель транспортного средства с повышенной проходимостью (дтсспп)

