Результат интеллектуальной деятельности: СПОСОБ ЭКСПЛУАТАЦИИ ЭЛЕКТРИЧЕСКОГО РУЛЕВОГО УПРАВЛЕНИЯ С УСИЛИТЕЛЕМ ДЛЯ АВТОМОБИЛЯ
Вид РИД
Изобретение
Изобретение относится к способу эксплуатации электрического рулевого управления с усилителем в соответствии с ограничительной частью пункта 1 формулы изобретения.
Из уровня техники известны различные способы генерации заданной уставки крутящего момента двигателя для серводвигателя:
DE 10115018 A1 раскрывает систему рулевого управления транспортного средства, в которой регулятор состояния посредством параметров состояния транспортного средства генерирует управляющее воздействие для устройства управления, при котором усилия на ободе рулевого колеса, прилагаемые водителем, были бы минимальными. Исходя из этого безмоментного рулевого управления, может подключаться задающее воздействие.
DE 102009002703 А1 раскрывает структуру регулирования для определения управляющего воздействия для управления регулятором крутящего момента в электрическом рулевом управлении транспортного средства в зависимости от предопределенного заданного крутящего момента торсионного стержня, причем регистрируется фактический крутящий момент торсионного стержня, формируется дифференциальный крутящий момент из заданного крутящего момента торсионного стержня и фактического крутящего момента торсионного стержня, и управляющее воздействие определяется посредством регулятора с обратной связью по выходу в зависимости от дифференциального момента.
Задачей настоящего изобретения является создание способа для определения заданной уставки для крутящего момента двигателя, который, в противоположность известным способам, позволяет легко осуществлять основную настройку при одновременном обеспечении полного и точного воздействия на управляемость и на сообщаемое водителю «чувство руля» (ощущение управления).
Эта задача решается с помощью отличительных признаков независимого пункта формулы изобретения.
Способ предусматривает, что заданное значение уставки формируется из по меньшей мере двух компонент крутящего момента двигателя, а именно компоненты предварительного управления крутящего момента двигателя, которая образует управляемую компоненту, и компоненты регулятора крутящего момента двигателя, которая образует регулируемую компоненту, причем параметром регулирования является крутящий момент торсионного стержня.
Обе компоненты крутящего момента двигателя функционально пересчитываются друг с другом, чтобы отсюда определять заданное значение уставки для крутящего момента серводвигателя.
Предпочтительные варианты осуществления способа приведены в зависимых пунктах формулы изобретения, которые поясняются более подробно со ссылками на чертежи.
В соответствии с этим предусмотрено, что для определения заданного значения уставки компонента предварительного управления крутящего момента двигателя определяется по меньшей мере в зависимости от крутящего момента торсионного стержня (MDS), причем дополнительно может учитываться скорость транспортного средства, а компонента регулятора крутящего момента двигателя определяется в зависимости от рассогласования регулирования из крутящего момента торсионного стержня и прикладываемого крутящего момента торсионного стержня, основанного на усилии реечного механизма.
Преимуществом является то, что компонента предварительного управления крутящего момента двигателя определяется с применением вспомогательной характеристики, которая по меньшей мере в зависимости от крутящего момента торсионного стержня определяет долю предварительного управления. Дополнительно, вспомогательная характеристика может быть параметризованной в зависимости от скорости транспортного средства, причем промежуточные значения интерполируются.
Предпочтительный вариант выполнения предусматривает, что компонента предварительного управления крутящего момента двигателя определяется с помощью регулятора.
При этом предпочтительно используется ограниченный по диапазону (насыщенный) PID-регулятор.
В соответствии с изобретением предусмотрено ограничивать компоненту регулятора крутящего момента двигателя специфическим для рулевого управления максимально устанавливаемым предельным значением. Это осуществляется предпочтительно в зависимости от скорости транспортного средства.
Кроме того, предусмотрено, что компонента предварительного управления крутящего момента двигателя определяется с применением вспомогательной характеристики, к которой в качестве дополнительного входного параметра подается скорость транспортного средства.
Прикладываемый крутящий момент торсионного стержня предпочтительно определяется с применением определенного усилия реечного механизма и/или дополнительных специфических для рулевого управления или динамики движения параметров транспортного средства и/или на основе различных компонент функции рулевого управления.
Компоненты крутящего момента двигателя затем функционально пересчитываются друг с другом, чтобы отсюда определить заданное значение уставки для крутящего момента двигателя.
Объектом изобретения также является компьютерная программа со средствами программного кода для выполнения способа в соответствии с изобретением, когда программа выполняется на микропроцессоре компьютера, в частности на блоке управления системы рулевого управления с усилителем или сервоуправления.
Объектом изобретения также является соответствующее устройство управления для эксплуатации системы рулевого управления с усилителем или сервоуправления, выполненное с возможностью осуществления способа в соответствии с изобретением или для выполнения соответствующей компьютерной программы, а также система рулевого управления с усилителем или сервоуправления, оснащенная соответствующим блоком управления.
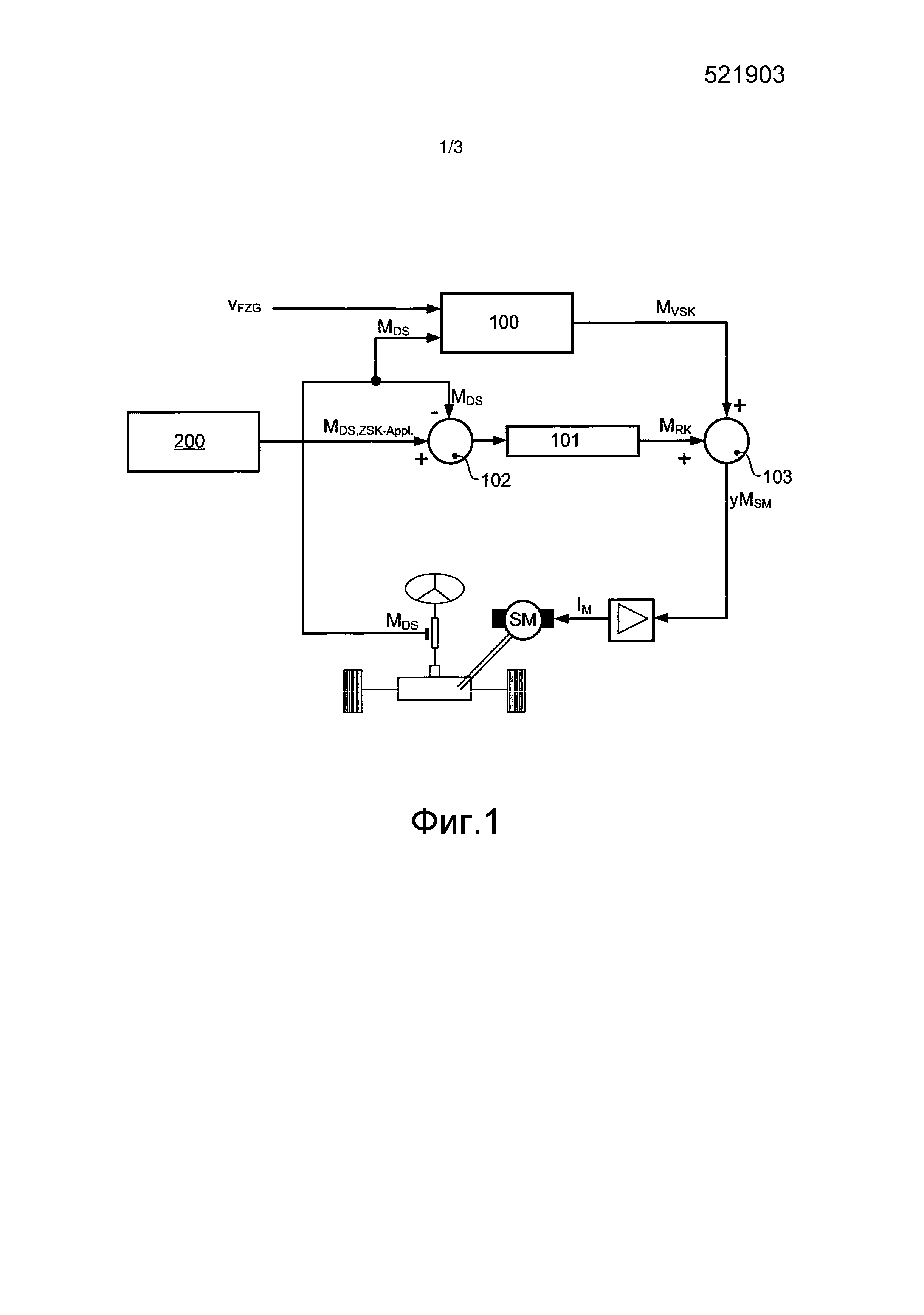
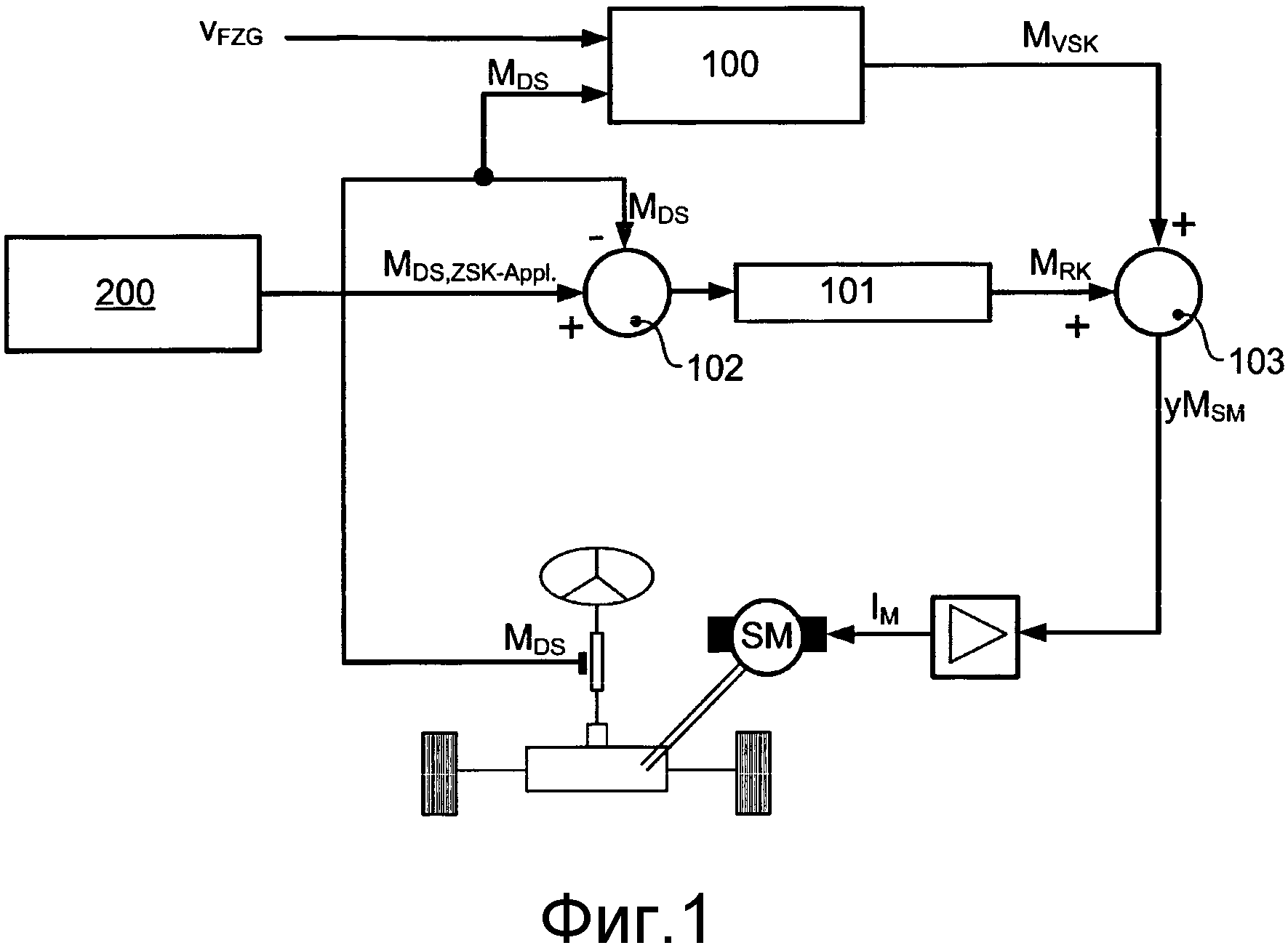
На Фиг.1 показана структурная схема, на основе которой поясняется предпочтительный вариант выполнения способа в соответствии с изобретением. Модуль 100 предварительного управления определяет на основе детектируемого на рулевой колонке крутящего момента торсионного стержня MDS первую компоненту, компоненту МVSK предварительного управления крутящего момента двигателя. Эта компонента представляет собой управляемую долю крутящего момента двигателя.
Для этого модуль 100 предварительного управления дополнительно применяет скорость VFZG транспортного средства. Модуль 100 включает в себя вспомогательную характеристику, которая в зависимости от крутящего момента торсионного стержня MDS и скорости VFZG транспортного средства определяет компоненту МVSK предварительного управления крутящего момента двигателя.
Кроме того, модуль 200 приложения крутящего момента торсионного стержня определяет прикладываемый крутящий момент торсионного стержня МDS, Appl. Эта компонента представляет собой регулируемую долю крутящего момента двигателя.
Определение значения прикладываемого крутящего момента торсионного стержня МDS, Appl будет обсуждаться более подробно в описании к фиг. 3.
Этот параметр представляет как бы задающий параметр для последующего регулирования и является определяющим для сообщаемого водителю заданного ощущения руля. Прикладываемый крутящий момент торсионного стержня МDS, Appl используется в качестве "задающего параметра", причем рассогласование регулирования по отношению к крутящему моменту торсионного стержня MDS определяется с помощью звена 102 определения рассогласования регулирования. С помощью последующего регулятора, модуля 101 регулятора скручивания торсионного стержня, определяется вторая компонента, компонента MRK регулирования крутящего момента двигателя. Эта компонента представляет регулируемую долю крутящего момента двигателя.
Регулятор предпочтительно выполнен как ограниченный по диапазону (насыщенный) PID-регулятор. Это обеспечивает возможность простого и стабильного приложения для соответствующего транспортного средства.
Обе компоненты посредством звена 103 объединения пересчитываются для формирования заданного значения уставки yMSM для выдаваемого серводвигателем SM крутящего момента MSМ двигателя. В простейшем случае это происходит за счет суммирования обоих значений.
Заданное значение уставки yMSM подается на блок выходного каскада, который посредством подчиненного, векторного каскада регулирования (FOR) генерирует соответствующие фазные токи IM для серводвигателя.
Компонента МVSK предварительного управления крутящего момента двигателя определяется по меньшей мере в зависимости от крутящего момента торсионного стержня MDS, и компонента MRK регулирования крутящего момента двигателя определяется в зависимости от рассогласования регулирования между крутящим моментом торсионного стержня MDS и прикладываемым крутящим моментом торсионного стержня МDS, Appl. Крутящий момент торсионного стержня измеряется в области рулевой колонки с помощью подходящего датчика.
В показанном примере выполнения компонента МVSK предварительного управления крутящего момента двигателя определяется с использованием вспомогательной характеристики, на которую в качестве дополнительного входного параметра подается скорость VFZG транспортного средства.
Преимущество способа в особенности проявляется в том, что с помощью компоненты МVSK предварительного управления могут выполняться требования относительно динамики системы, причем в то же время с помощью регулируемой компоненты MRK водителю может сообщаться передаваемое "заданное" ощущение руля. Быстрые движения рулевого управления водителя, таким образом, передаются в форме управления с высокой динамикой на систему рулевого управления, одновременно может осуществляться регулируемое, ограниченное по своему влиянию воздействие на момент рулевого управления водителя согласно заданному значению уставки.
С помощью предварительного управления, инициированного посредством модуля 100 предварительного управления, для момента yMSM двигателя, в частности для случая, когда требуются высокие моменты поддержки, "базовая поддержка" посредством серводвигателя накладывается на систему рулевого управления. Эта базовая поддержка исключается из регулирования и, следовательно, соответствует с функциональной точки зрения "управлению базовой поддержки".
Модуль 100 предварительного управления определяет на основе скорости VFZG транспортного средства и крутящего момента торсионного стержня MDS компоненту МVSK предварительного управления крутящего момента двигателя в соответствии с "базовой поддержкой".
Поведение модуля 100 предварительного управления при этом реализуется таким образом, что значение компоненты МVSK предварительного управления крутящего момента уменьшается с увеличением скорости транспортного средства и возрастает с увеличением крутящего момента торсионного стержня.
Регулирование крутящего модуля торсионного стержня MDS, инициированное модулем 101 регулятора скручивания торсионного стержня, оказывается особенно выгодным в случае, когда возникают низкие или очень малые моменты поддержки в "области изменения направления движения”, то есть в области относительно близко к положению прямолинейного движения рулевого колеса. При этом, как правило, возникают относительно малые усилия поддержки порядка величины около 0,5 Нм.
Здесь модуль 101 регулятора скручивания торсионного стержня берет на себя функцию "истинного" регулирования для крутящего момента торсионного стержня MDS на основе заданной уставки МDS, Appl модуля 200 приложения крутящего момента торсионного стержня.
За счет преобразования трансмиссии эти малые моменты поддержки соответственно усиливаются до ощущения рулевого управления. Поэтому регулирование торсионного крутящего момента имеет особенно положительное влияние на сообщаемое водителю ощущение руля.
Значительным преимуществом является при этом выполнение модуля 101 регулятора скручивания торсионного стержня, то есть собственно регулятора, который включает в себя закон регулирования для регулирования крутящего момента торсионного стержня как насыщенного PID- (пропорционально-интегрально-дифференциального) регулятора. Это позволяет проводить с относительно небольшими усилиями настройку регулятора на все возможные ситуации вождения.
Насыщенный диапазон регулятора лежит приблизительно в диапазоне +/-0,5 Нм. В этом диапазоне возможно регулируемое, свободное воздействие на момент рулевого управления водителя. Это приводит к тому, что во время прямолинейного движения доминирует компонента регулирования, в то время как при быстрых рулевых движениях преобладает компонента управления.
По этой причине компонента MRK регулятора крутящего момента двигателя ограничивается специфическим для рулевого управления максимально предоставляемым предельным значением +/- MRK,lim. Ограничение компоненты MRK регулятора крутящего момента двигателя осуществляется при этом в зависимости от скорости VFZG транспортного средства.
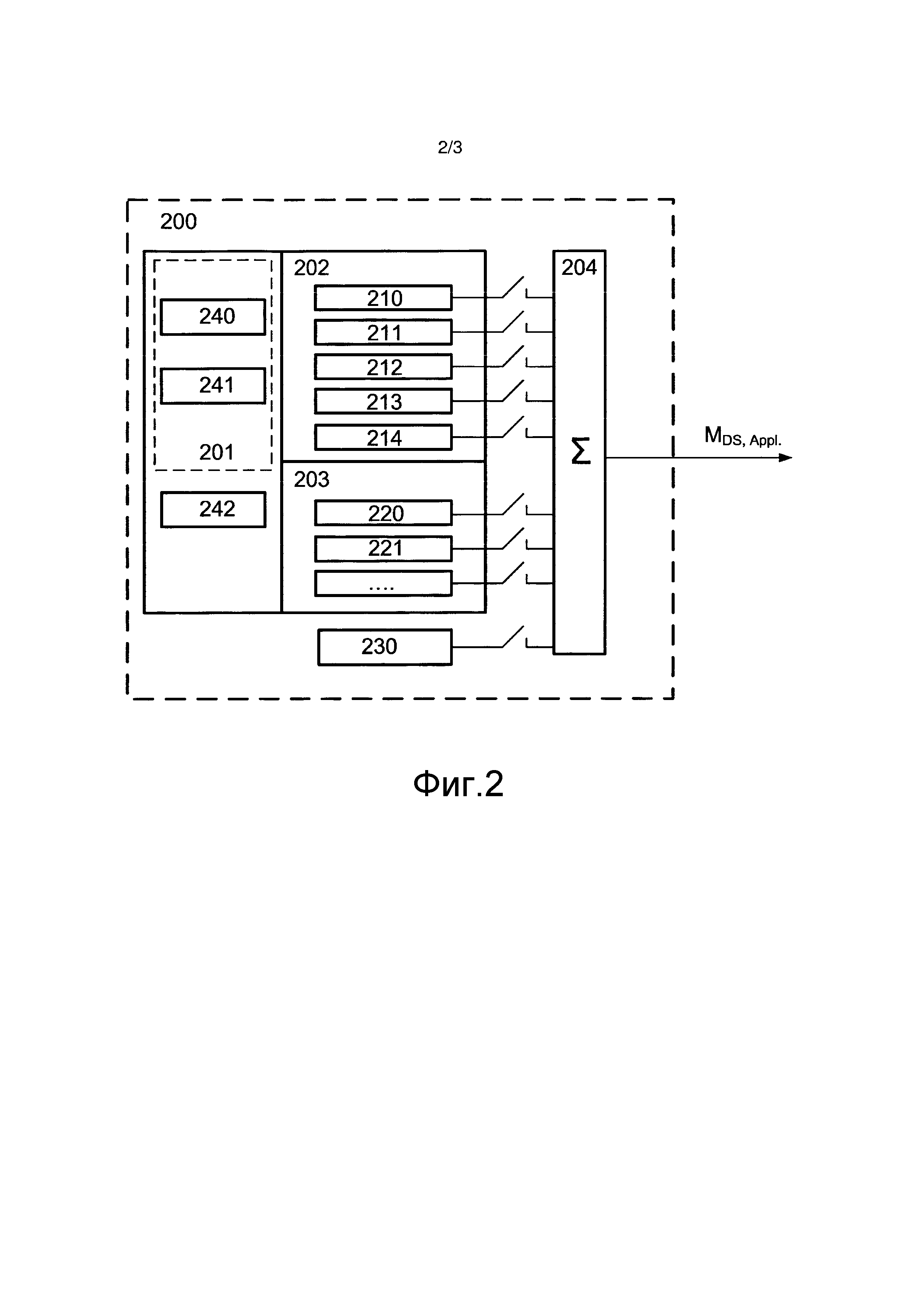
На Фиг. 2 показаны в качестве примера различные методы генерации прикладываемого крутящего момента торсионного стержня МDS,Appl. Эти методы могут быть применены по отдельности или в комбинации.
Модуль 200 приложения крутящего момента торсионного стержня включает в себя модуль 201 определения усилия реечного механизма, который определяет вычисленное или оцененное значение усилия реечного механизма (ZSK).
Кроме того, модуль 200 включает в себя блок 242, который содержит связанные с рулевым управлением или специфические для транспортного средства параметры, такие как текущий угол поворота рулевого колеса, угловую скорость рулевого управления, текущую скорость движения, число оборотов ротора серводвигателя и другие параметры динамики движения.
В показанном варианте выполнения определяются два значения ZSK, которые определяются разными способами:
Динамическая компонента 240 (ZSK-D) и связанная с комфортом компонента 241 (ZSK-С). При этом значения ZSK-D определяются из внутренних параметров рулевого управления, которые описывают момент или усилие в системе рулевого управления на основе механических и/или электрических уравнений. Значение ZSK-С определяется с применением параметров транспортного средства, внешних для рулевого управления, которые описывают состояние движения, на основе физических относящихся к движению взаимосвязей.
Оба параметра ZSK могут быть объединены друг с другом в результирующее усилие реечного механизма или смешаны друг с другом в любом соотношении, в зависимости от условий движения. Результирующее усилие реечного механизма подается затем на отдельные функциональные блоки основного модуля 202 поддержки рулевого управления или вспомогательного модуля 203 функции рулевого управления.
При этом функциональные блоки основного модуля 202 поддержки рулевого управления могут включать в себя следующие составные части: основной момент рулевого управления в зоне шарнирного соединения 210, активная функция обратного хода 211, функциональный блок 212 центрированного восприятия, активная функция 213 демпфирования и блок 214 компенсации трения и гистерезиса.
Функциональные блоки вспомогательного функционального модуля 203 рулевого управления могут включать в себя следующие составные части:
Функция 220 поддержки излишней поворачиваемости и функция 221 поддержки недостаточной поворачиваемости.
Кроме того, могут быть предусмотрены вмешательства верхнего уровня со стороны изготовителя транспортного средства с помощью интерфейса к OEM-функциям 230. Они включают в себя автономные вмешательства в рулевое управление, такие как держание колеи (продольная устойчивость) и следящее управление или введение маневров уклонения.
Некоторые функциональные блоки 202, 203 требуют дополнительно или исключительно применения связанных с рулевым управлением параметров блока 242. Например, активная функция 213 демпфирования может определять специфическую для демпфирования долю крутящего момента торсионного стержня только на основе мгновенной скорости ротора серводвигателя.
В связи с описанным на фиг. 1 вариантом выполнения изобретения согласно этому предусмотрено, что прикладываемый крутящий момент торсионного стержня (МDS, Appl) определяется с применением определенного усилия реечного механизма (RFM-C, RFM-D) и/или посредством специфических для рулевого управления или относящихся к динамике движения параметров транспортного средства на основе различных компонент 210, 211, 212, 113, 214, 220, 220, 221, 230 рулевого управления.
С помощью блока 204 суммирования или задания весовых коэффициентов все определенные функциональные компоненты пересчитываются, чтобы сформировать общий прикладываемый крутящий момент торсионного стержня МDS, Appl.
В простейшем случае все компоненты суммируются с помощью блока 204 суммирования, чтобы определить общий прикладываемый крутящий момент торсионного стержня МDS, Appl.
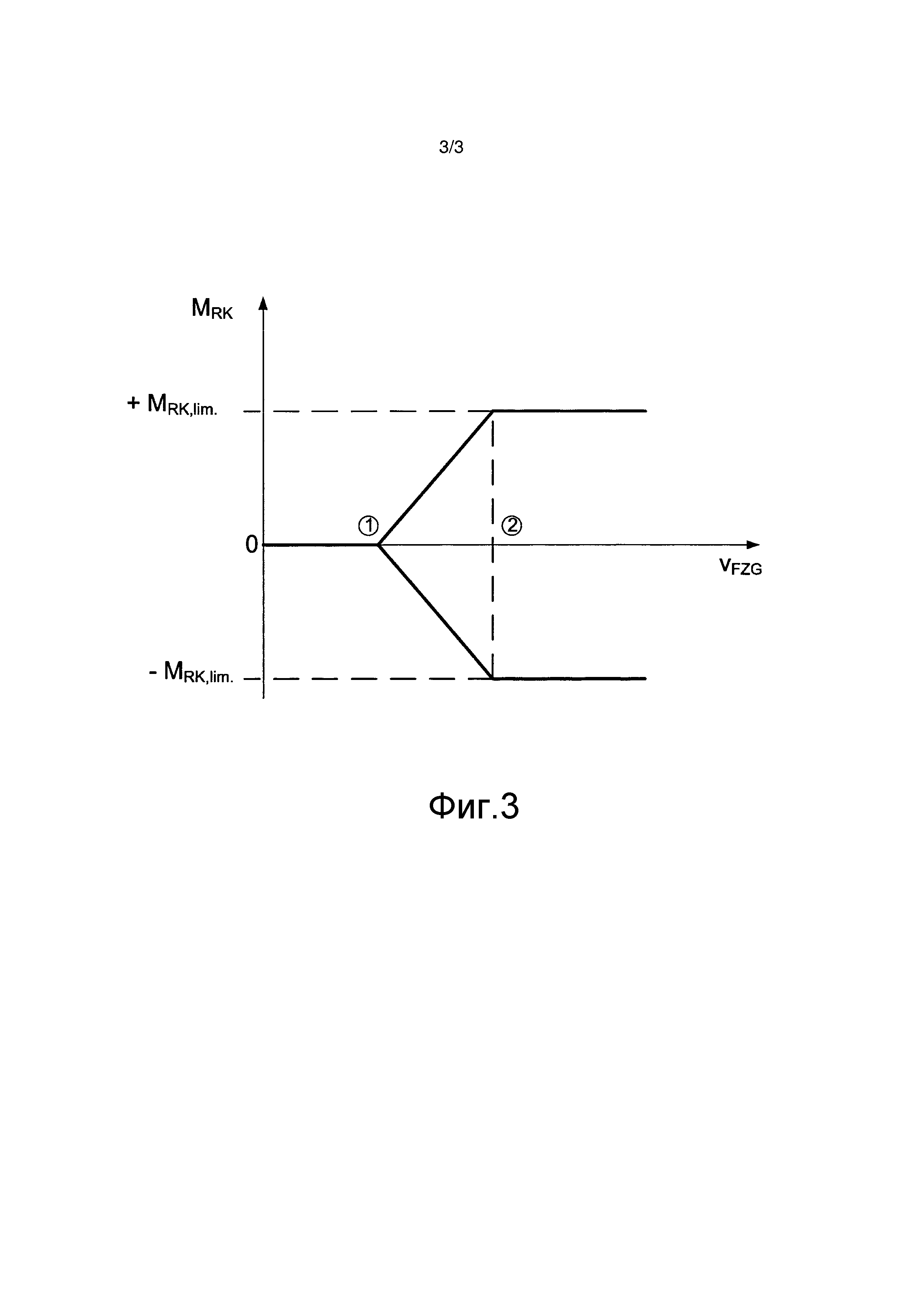
Фиг. 3 представляет собой ограничение максимальной допустимой доли компоненты MRK регулятора крутящего момента двигателя.
Ограничение осуществляется предпочтительно в зависимости от скорости VFZG транспортного средства. От состояния покоя до скорости приблизительно от 10 до 15 км/ч (точка 1) регулируемая доля составляет 0 Нм, начиная от этой скорости, максимально допустимая доля линейно с наклоном увеличивается до второй скорости (точка 2) до максимального симметричного значения +/- MRK, lim. Это значение составляет примерно от 0,3 до 0,5 Нм.
Список ссылочных позиций
100 модуль предварительного управления
101 модуль регулятора скручивания торсионного стержня
102 звено определения рассогласования регулирования
103 звено объединения
200 модуль приложения крутящего момента торсионного стержня
201 модуль определения усилия реечного механизма
202 основной модуль поддержки рулевого управления
203 дополнительный модуль рулевого управления
204 блок суммирования
205 модуль регулятора скручивания торсионного стержня
210 основной момент рулевого управления в зоне шарнирного соединения
211 активный обратный ход
212 центрированное восприятие
213 активное демпфирование
214 гистерезис
220 поддержка излишней поворачиваемости
221 поддержка недостаточной поворачиваемости
230 внешние функции рулевого управления
240 усилие реечного механизма, динамическая компонента (ZSK-D)
241 усилие реечного механизма, связанная с комфортом компонента (ZSK-С)
242 связанные с рулевым управлением параметры
MDS крутящий момент торсионного стержня
SM серводвигатель
Im ток серводвигателя
yMSM заданная уставка для крутящего момента двигателя
MSM крутящий момент двигателя
МVSK компонента предварительного управления крутящего момента двигателя
MRK компонента регулятора крутящего момента двигателя
МDS, Appl прикладываемый крутящий момент торсионного стержня
VFZG скорость транспортного средства
Способ работы рулевого управления с усилителем
Устройство опорной втулки для телескопического рулевого вала и снабженная им система рулевого управления
Рулевой механизм
Поршневой клапан
Способ работы рулевого управления с усилителем
Устройство опорной втулки для телескопического рулевого вала и снабженная им система рулевого управления
Рулевой механизм

