Результат интеллектуальной деятельности: СПОСОБ РАБОТЫ РУЛЕВОГО УПРАВЛЕНИЯ С УСИЛИТЕЛЕМ
Вид РИД
Изобретение
Изобретение относится к способу работы рулевого управления с усилителем и к такому рулевому управлению с усилителем.
Рулевые управления с усилителем известны и предусматривают, что на прикладываемый водителем ручной момент накладывается с помощью двигателя момент двигателя. Поскольку рулевое управление обычно используется на открытом воздухе, то оно подвергается воздействию наружных влияний, в частности влияний окружения и температуры. Это может отрицательно сказываться на работе рулевого управления. При этом, в частности, особую проблему представляет замерзание рулевого управления с усилителем вследствие проникновения воды.
Известно расположение отводящего воду клапана в корпусе рулевого управления, в частности осепараллельное расположение, который при вхождении воды открывается и обеспечивает слив проникшей в передачу рулевого управления воды и тем самым предотвращает замерзание воды при низких температурах.
Из публикации WO 2008/116555 А1 известна электромеханическая система и способ для распознавания начинающегося замерзания электромеханической системы, а также транспортное средство с электромеханической системой. Электромеханическая система содержит электродвигатель, по меньшей мере один механический элемент, который приводится в движение электродвигателем, при этом управляющее устройство из входной величины определяет заданную величину для электродвигателя. Предусмотрено, что измеряется регулирующая переменная механического элемента, при этом из сравнения заданной величины для электродвигателя и регулирующей переменной механической системы определяется неравномерность движения. Кроме того, приводится описание в качестве пригодных средств для распознавания опасности сгущения или замерзания рабочей жидкости или проникшей в электромеханическую систему жидкости датчика температуры, датчика влаги и так называемого распознавателя неравномерности движения. Распознаватель неравномерности движения может быть, например, средством для приема шумов, соответственно корпусного шума.
Ставится задача предложить способ работы рулевого управления с усилителем, с помощью которого можно простым образом распознавать отрицательные влияния на работу рулевого управления с усилителем. При этом ставится задача, в частности, распознавания отрицательного влияния возможно раньше, соответственно, уже в начале отрицательного влияния.
Предлагаемый способ работы рулевого управления с усилителем предусматривает, что на заданный водителем ручной момент накладывается в блоке наложения создаваемый двигателем момент двигателя. При этом отрицательное влияние на рулевое управление с усилителем распознают посредством оценки образцов частоты вращения двигателя.
Предлагаемый способ пригоден, в частности, для распознавания замерзания рулевого управления с усилителем в рулевом управлении, соответственно, в рулевых тягах.
Целесообразно учитывать распознаваемый коэффициент трения.
Дополнительно к этому можно привлекать другие краевые условия, такие как частота вращения ротора, ручной момент, номинальный момент двигателя, угол поворота рулевого колеса, скорость транспортного средства, температура оконечной ступени (ECU), наружная температура и/или показатель знака передачи.
При выполнении учитывают направление действия ручного момента и направление действия момента двигателя. При этом учитывается, действуют ли ручной момент и момент двигателя, которые образуют действующий момент, в одинаковом направлении. Это требует безотказности способа, поскольку тем самым можно проверять, что вызван ли распознанный образец частоты вращения действием водителя и не обусловлен ли он внешними помехами.
При распознавании отрицательного влияния принимаются контрмеры. Примером этому является нагрузка колеблющимся моментом двигателя. Кроме того, можно подавать предупреждающий сигнал (оптический и/или акустический).
Указанное рулевое управление с усилителем имеет средство управления для задания ручного момента, двигатель, обычно электродвигатель, и блок наложения, с помощью которого на заданный водителем ручной момент накладывается момент двигателя. Рулевое управление с усилителем характеризуется тем, что отрицательное влияние на рулевое управление с усилителем распознается посредством оценки образцов частоты вращения двигателя.
В одном варианте выполнения предусмотрено управляющее устройство, которое измеряет и оценивает образцы частоты вращения двигателя.
Таким образом, предлагается способ, в котором на основании образцов частоты вращения и распознаваемого трения распознают замерзание рулевого управления. Для предотвращения опасного состояния можно подавать колеблющийся момент двигателя, что приводит к тому, что можно лучше справляться с замерзающим рулевым управлением и не допускать его полного замерзания.
При этом можно распознавать опасность сгущения или замерзания рабочей жидкости или проникшей в рулевое управление с усилителем жидкости.
Указанный способ можно выполнять в микропроцессоре, соответственно, вычислительном блоке управляющего устройства. В этом случае способ выполняется в программном обеспечении, соответственно, в выполняемом компьютером алгоритме, который выполняется автоматически и регистрирует и оценивает технические параметры.
Входными величинами алгоритма могут быть частота вращения ротора, абсолютная скорость вращения ротора, ручной момент, номинальный момент двигателя, абсолютный угол поворота рулевого колеса, обычно фильтрованная скорость транспортного средства, температура оконечной ступени процессора, знак передачи и распознанный коэффициент трения.
Если рулевое управление начинает замерзать во время движения, то возникают специфические образцы частоты вращения, которые можно распознавать с помощью используемого в управляющем устройстве программного обеспечения. Если рулевое управление не замерзло, то управление водителем приводит к почти непрерывному ходу частоты вращения ротора.
Если рулевое управление начинает замерзать в соответствии с типичным сценарием, то частота вращения в течение примерно 100 мс очень мала (<5 об/мин), затем водитель снова «свободно управляет» рулевым управлением, что приводит к кратковременному скачку частоты вращения. Затем рулевое управление снова слегка замерзает, что на короткое время снова приводит к очень малой частоте вращения. Если такой образец частоты вращения возникает несколько раз друг за другом, например 10 раз, и выполняются другие краевые условия, такие как, например, температура <+5ºС, трение в системе >0,2 Нм и т.д., то распознается замерзание рулевого управления.
После распознавания можно подавать колеблющийся момент двигателя, что предотвращает дальнейшее замерзание и за счет этого значительно улучшается управляемость транспортного средства, поскольку больше не возникают эффекты неравномерности движения при замерзании. Колеблющийся момент служит одновременно в качестве гаптической обратной сигнализации для предупреждения водителя.
Таким образом, обеспечивается возможность улучшенной управляемости рулевого управления водителем, и оно не замерзает полностью.
При распознавании замерзания может, например, активироваться лампочка сигнализации неисправности и/или акустический сигнал.
В одном конкретном варианте выполнения предусмотрено, что в качестве входных величин выполняемого с помощью компьютера способа используются частота вращения ротора, и/или ручной момент, и/или номинальный момент двигателя, и/или угол поворота рулевого колеса, и/или скорость транспортного средства, и/или температура оконечной ступени (ECU), и/или наружная температура, и/или температура печатной платы, и/или знак передачи, и/или определяемый коэффициент трения.
Указанная компьютерная программа содержит средства программных кодов для выполнения всех указанных выше стадий способа, когда компьютерная программа выполняется в компьютере или соответствующем вычислительном блоке.
Компьютерный программный продукт содержит эти средства программных кодов, которые хранятся на читаемом с помощью компьютера носителе информации.
Эта компьютерная программа может быть записана на читаемом компьютером носителе информации, таком как, например, дискета, CD, DVD, жесткий диск, карта памяти USB или т.п., или же в сервере Интернета в качестве компьютерной программы. Оттуда компьютерную программу можно переносить в память управляющего устройства.
Другие преимущества изобретения следуют из приведенного ниже описания и прилагаемых чертежей.
Понятно, что указанные выше и еще подлежащие пояснению признаки можно применять не только в соответствующей приведенной комбинации, но также и в других комбинациях или самостоятельно, без выхода за рамки данного изобретения.
Ниже приводится подробное описание изобретения на основании примера выполнения со ссылками на прилагаемые чертежи, на которых схематично изображено:
фиг. 1 - вариант выполнения предлагаемого рулевого управления с усилителем;
фиг. 2 - ход частоты вращения со скачками;
фиг. 3 - скачок в ходе частоты вращения.
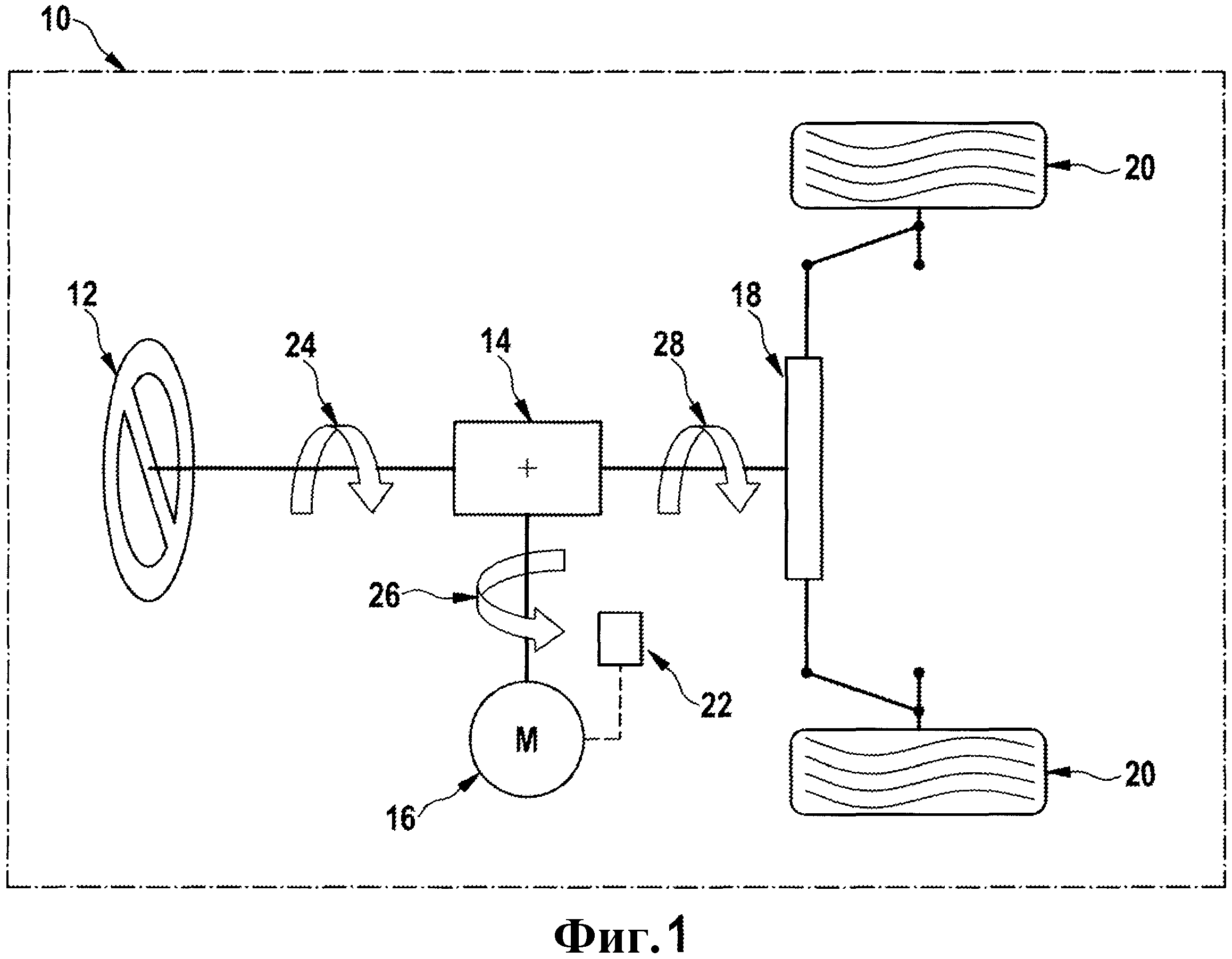
На фиг. 1 показано рулевое управление с усилителем, которое обозначено в целом позицией 10.
Рулевое управление 10 с усилителем содержит средство 12 управления, которое выполнено в виде рулевого колеса, блок 14 наложения, который согласован с двигателем 16 для наложения момента, зубчатую рейку 18, два шарнирно соединенных колеса 20, согласованное с двигателем 16 управляющее устройство 22.
С помощью средства 12 управления задается ручной момент 24. На этот ручной момент 24 в блоке 14 наложения накладывается момент 26 двигателя, который создается двигателем 16. За счет этого создается действующий момент 28, который прикладывается к зубчатой рейке 18 и с помощью которого осуществляется управление колесами 20.
Управляющее устройство 22, наряду с управлением двигателем 16, предназначено для регистрации образца частоты вращения, т.е. специфического хода изменения частоты вращения, этого двигателя 16. Эти образцы частоты вращения оцениваются и тем самым определяется, имеется ли отрицательное влияние, например замерзание, на рулевое управление 10 с усилителем. Если распознается отрицательное влияние, то принимаются контрмеры, например колебательная нагрузка рулевого управления 10 с усилителем с помощью двигателя 16. Дополнительно предупреждается водитель.
При оценке можно учитывать различные другие краевые значения, соответственно, краевые условия, такие как, например, коэффициент трения. В частности, проверяется, действуют ли ручной момент 24 и момент 26 двигателя в одинаковом направлении. В противном случае распознаваемые специфические образцы частоты вращения могут быть обусловлены не за счет воздействия водителя, а другими влияниями, например неровностями полосы движения.
В любом случае целесообразно принимать контрмеры лишь тогда, когда специфический образец частоты распознается несколько раз друг за другом в определенный промежуток времени. Для этого можно использовать, например, счетчик, который после определенного промежутка времени, заданного, например, с помощью таймера или датчика времени, снова сбрасывается на ноль.
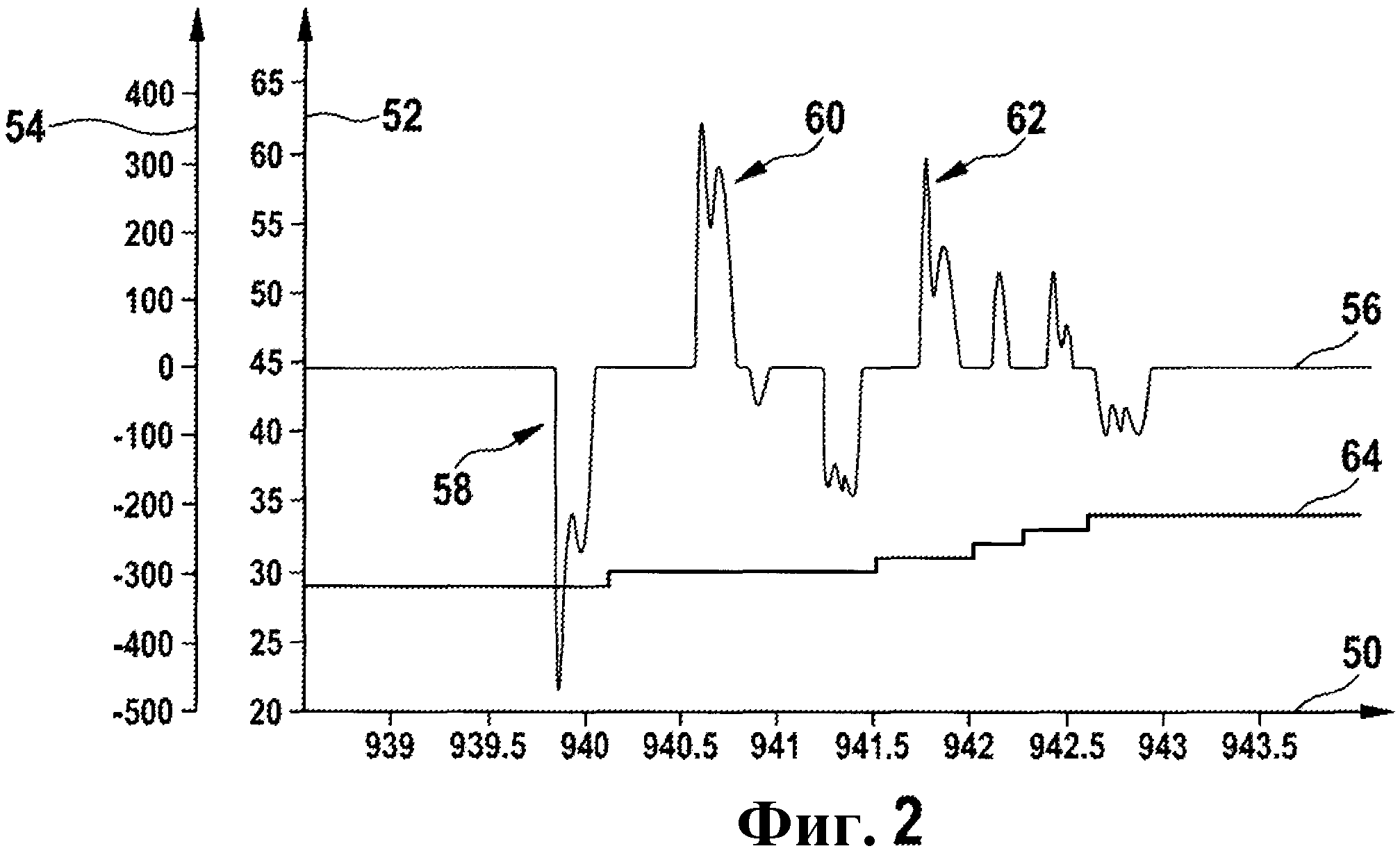
На фиг. 2 показан ход частоты вращения со скачками в зависимости от времени. На оси 50 абсцисс отложено время в мс, на первой ординате 52 - показания счетчика и на второй ординате 54 - частота вращения в оборотах за минуту.
Кривая 56 показывает ход частоты вращения и в свою очередь составлена из некоторого количества образцов 58, 60 и 62 частоты вращения. В этом случае распознаются определенные характерные скачки в кривой 56 в качестве образцов 58, 60 и 62 частоты вращения, которые являются типичными для эффекта неравномерности движения (движения рывками). Как только распознается такой характерный образец 58, 60 и 62 частоты вращения, включается счетчик, как иллюстрировано с помощью другой кривой 64. Тем самым определяется количество определенных образцов частоты вращения, соответственно, количество характерных скачков в кривой 56 и тем самым в ходе частоты вращения. При достижении счетчиком определенного заданного состояния распознается замерзание и инициируются подходящие мероприятия. Однако по истечении определенного промежутка времени счетчик сбрасывается, с целью обеспечения устойчивой работы.
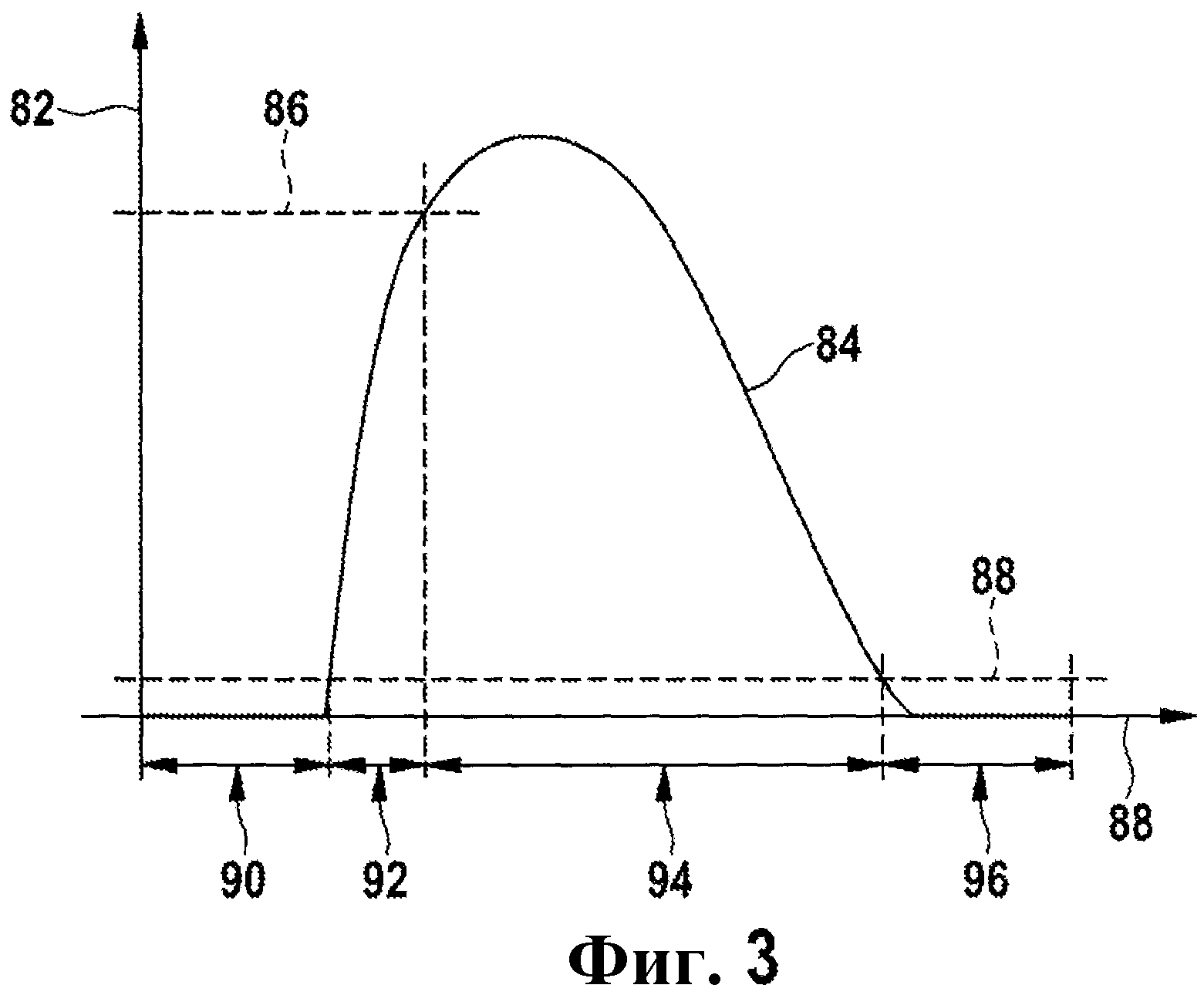
На фиг. 3 показан скачок в ходе частоты вращения. На абсциссе 80 нанесено время в мс. На ординате 82 нанесен ход частоты вращения в оборотах в минуту.
Кривая 84 показывает скачок в ходе частоты вращения. Порог 86 показывает верхний порог частоты вращения, а другой порог 88 показывает нижний порог частоты вращения. Первый диапазон 90 времени задает минимальное время для нижней частоты вращения, другой диапазон 92 времени задает максимальное время до достижения верхней частоты вращения, еще один диапазон 94 времени задает максимальное время до достижения снова нижней частоты вращения, и еще один диапазон 96 времени задает минимальное время для нижней частоты вращения. С их помощью анализируется кривая 84 и скачки в ней. Таким образом, определяются характерные образцы частоты вращения.
Силовой узел для электрической системы рулевого управления
Определение управляющего параметра для управления регулятором момента в рулевом управлении автомобиля
Способ эксплуатации электрического рулевого управления с усилителем для автомобиля
Силовой узел для электрической системы рулевого управления
Определение управляющего параметра для управления регулятором момента в рулевом управлении автомобиля
Способ эксплуатации электрического рулевого управления с усилителем для автомобиля

