Результат интеллектуальной деятельности: Механизм распределения мощности в трансмиссии автомобиля
Вид РИД
Изобретение
Изобретение относится к колесным транспортным средствам, преимущественно автомобилям повышенной и высокой проходимости.
В области транспортного машиностроения (в том числе в системах управления поворотом гусеничных машин с использованием фрикционных тормозных элементов) рассматриваются возможности реализации широтно-импульсного модулирования давления во фрикционных парах трения - ШИМД [К методу оценки частоты импульсного управления поворотом гусеничной машины / Бойков А.В., Григорьев А.П., Русинов Р.В. // Рабочие процессы в компрессорах и установках с ДВС: межвузовский сборник. - Л.: Изд-во ЛПИ им. М.И. Калинина, 1987. - С. 73-78].
Наиболее близким, выбранным за прототип, является механизм распределения мощности в трансмиссии автомобиля, содержащий редукторную часть с двумя степенями свободы («двухстепенной редуктор»), входное звено которого опосредованно связано с двигателем, а выходные звенья опосредованно, например через полуоси, связаны с ведущими колесами автомобиля, с планетарными зубчатыми рядами - нулевым, первым и вторым, причем нулевой, непосредственно связанный с входным звеном, является простым дифференциалом, тормозные элементы с возможностью дифференцированного тормозного воздействия на звенья редукторной части и электронную систему управления упомянутыми тормозными элементами, связанную с рулевым механизмом с возможностью поворота управляемых колес автомобиля [Dr. Claus Granzov. ZV Vector Drive - better driving dynamics and diving Satety through Torque Vectoring // http://www.irs.kit.edu/download/131213_GC_TorqueVectoring_ZF_Handout.pdf. 13.12.2013]. В нем редукторная часть выполнена с простым коническим дифференциалом и двумя, слева и справа от упомянутого конического дифференциала, одинаковыми цилиндрическими трехзвенными планетарными зубчатыми рядами со ступенчатыми сателлитами, при этом входное звено редукторной части (корпус конического дифференциала) соединено с зубчатым солнцем малой ступени указанного сателлита, большая ступень последнего соединена посредством другого зубчатого солнца с одной из полуосей и, далее, с одним из ведущих колес автомобиля, а водило - с дисковыми подвижными элементами тормоза.
Прототип позволяет реализовывать подводимую к ведущим колесам автомобиля мощность в соответствии с условиями движения. Однако «обрастание» МРМ дополнительными механическими, гидравлическими и электронными устройствами приводит к ухудшению массогабаритных показателей и росту себестоимости.
Задача заключается в устранении указанных недостатков прототипа и в улучшении технико-эксплуатационных (в приложении к колесным шасси гражданских транспортных средств) или тактико-технических характеристик (в приложении к колесным шасси военных и специальных транспортных средств).
Решение поставленной задачи достигается тем, что в механизме распределения мощности в трансмиссии автомобиля, содержащем редукторную часть с двумя степенями свободы, входное звено которого опосредованно связано с двигателем, а выходные звенья опосредованно, например через полуоси, связаны с ведущими колесами автомобиля, с планетарными зубчатыми рядами - нулевым, первым и вторым, причем нулевой, непосредственно связанный с упомянутым входным звеном, является простым дифференциалом, тормозные элементы с возможностью дифференцированного тормозного воздействия на звенья редукторной части и электронную систему управления упомянутыми тормозными элементами, связанную с рулевым механизмом с возможностью поворота управляемых колес автомобиля, редукторная часть выполнена с тремя цилиндрическими трехзвенными планетарными зубчатыми рядами, при этом входное ее звено соединено со звеньями, по меньшей мере, двух планетарных рядов, а система управления тормозными элементами выполнена с использованием принципа широтно-импульсной модуляции давления во фрикционных контактных парах тормозных элементов.
Решение поставленной задачи достигается также за счет дополнительных конструктивных признаков (при сформулированной выше основной совокупности признаков):
- все три планетарных ряда могут быть выполнены со сдвоенными зубчатыми сателлитами, входное звено через коническую зубчатую передачу соединено с одной стороны с зубчатым водилом нулевого планетарного ряда и далее с первым сателлитом этого ряда, а с другой стороны - с водилом первого планетарного ряда и далее - с зубчатым солнцем второго планетарного ряда, водило нулевого планетарного ряда соединено с одним из упомянутых ведущих колес автомобиля, второй сателлит нулевого планетарного ряда через зубчатое солнце последнего вместе с зубчатым солнцем первого планетарного ряда и водилом второго планетарного ряда соединены с другим из упомянутых ведущих колес автомобиля, а зубчатые эпициклы первого и второго планетарных рядов связаны с соответствующими упомянутыми тормозными элементами, при этом кинематические параметры k всех планетарных рядов положительны, а величина кинематического параметра k0 нулевого планетарного ряда равна двум (это позволяет, во-первых, достичь максимальной компактности конструкции и, во-вторых, сделать нулевой планетарный ряд функциональным аналогом простого дифференциала - конического дифференциала);
- нулевой и второй планетарные ряды могут быть выполнены со сдвоенными зубчатыми сателлитами, входное звено через коническую зубчатую передачу соединено, односторонне и параллельно, с зубчатыми эпициклами нулевого и первого планетарных рядов, водило нулевого планетарного ряда соединено с одним из упомянутых ведущих колес автомобиля, эпицикл нулевого планетарного ряда посредством сдвоенного сателлита и зубчатого солнца соединен, вместе с общим водилом первого и второго планетарных рядов, с другим из упомянутых ведущих колес автомобиля, зубчатое солнце первого планетарного ряда вместе с первым зубчатым солнцем при первом зубчатом сателлите второго планетарного ряда связаны с одним из тормозных элементов, а второе зубчатое солнце при втором зубчатом сателлите второго планетарного ряда связано с другим из тормозных элементов, при этом кинематические параметры k1 и k2 соответственно первого и второго планетарных рядов отрицательны, а кинематический параметр k0 нулевого планетарного ряда равен двум (это позволяет улучшить компоновку тормозов и упростить конструкцию второго ряда - избежать в нем сдвоенных сателлитов);
- нулевой планетарный ряд может быть выполнен со сдвоенными сателлитами, входное звено через коническую зубчатую передачу соединено, односторонне и параллельно, с зубчатыми солнцами нулевого и первого планетарных рядов, а также с водилом второго планетарного ряда, водило нулевого планетарного ряда соединено с одним из упомянутых ведущих колес автомобиля, второй сателлит нулевого планетарного ряда через зубчатое солнце последнего вместе с водилом первого и зубчатым эпициклом второго планетарных рядов соединены с другим из упомянутых ведущих колес автомобиля, а зубчатые солнца первого и второго планетарных рядов связаны с соответствующими упомянутыми тормозными элементами, при этом кинематические параметры k1 и k2 соответственно первого и второго планетарных рядов отрицательны, а кинематический параметр k0 нулевого планетарного ряда равен двум (это позволяет, за счет применения простых планетарных механизмов, достичь максимальной технологичности конструкции).
Среди известных устройств и способов не обнаружены такие, совокупность существенных признаков которых совпадала бы с заявленной. В то же время, именно за счет последней достигается новый технический результат в соответствии с поставленной задачей.
Заявляемое устройство механизма распределения мощности в трансмиссии автомобиля пояснено (на примере межколесного дифференциала) на чертежах:
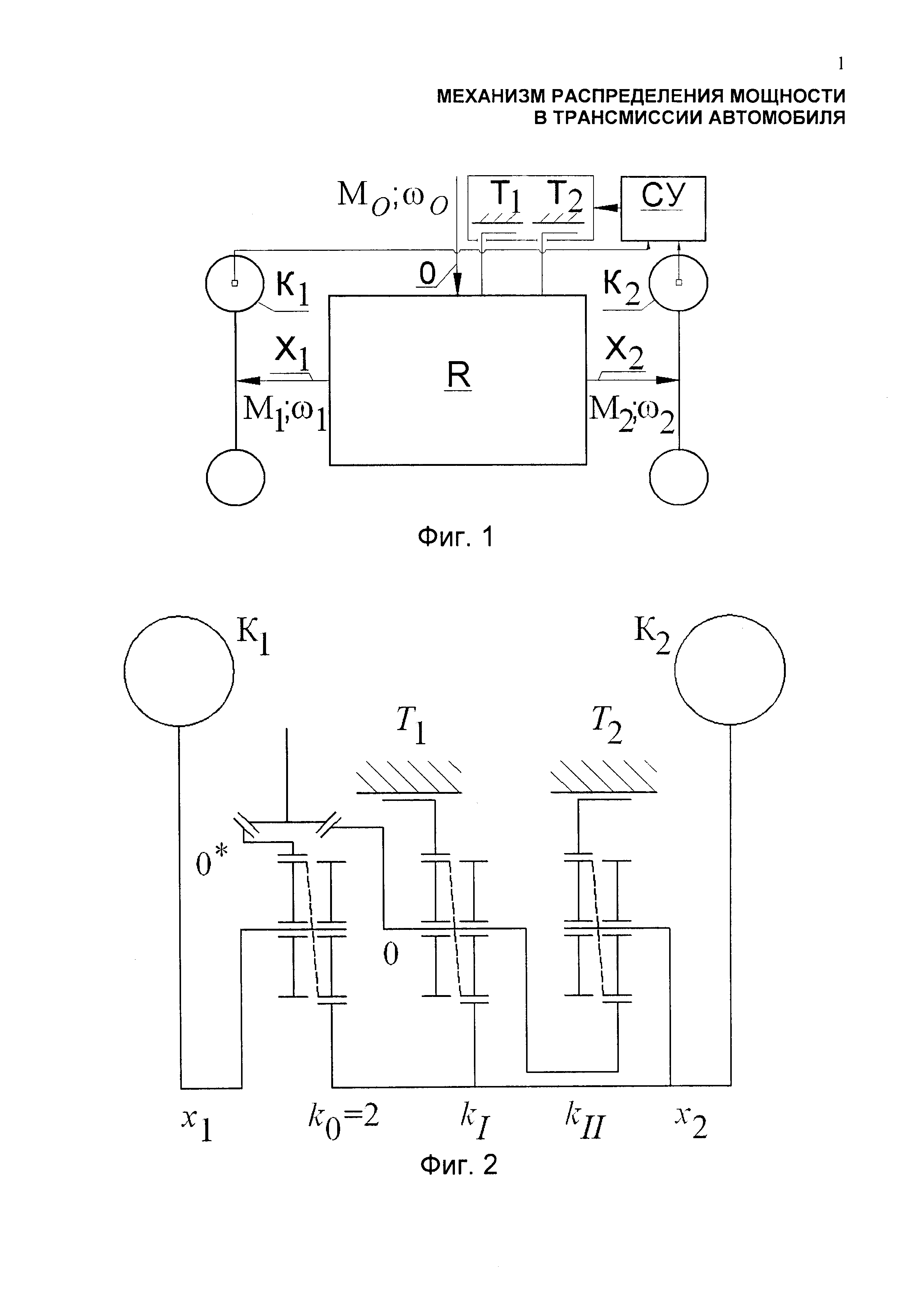
на фиг. 1 показана обобщенная блок-схема заявляемого устройства, где R - редукторная часть механизма распределения мощности (МРМ); T1, T2 - тормоза определенных (см. далее варианты) звеньев редукторной части R; СУ - система управления упомянутыми тормозами; 0, X1, X2 - входное и выходные звенья R; M0, M1, M2 - крутящие моменты на звеньях 0, X1, X2 соответственно; ω0, ω1, ω2 - скорости вращения звеньев 0, X1, X2 соответственно; K1, K2 - ведущие колеса автомобиля;
на фиг. 2 - показана кинематическая схема первого (по порядку и по авторскому рейтингу) варианта заявляемого механизма распределения мощности (МРМ-1), где дополнительно введены обозначения: 0* - звено, параллельное звену 0 и имеющее скорость вращения минус ω0; k0, kI, kII - кинематические параметры «k» одноименных (нулевого «0», первого I и второго II) планетарных зубчатых рядов редукторной части R; u - передаточное отношение;
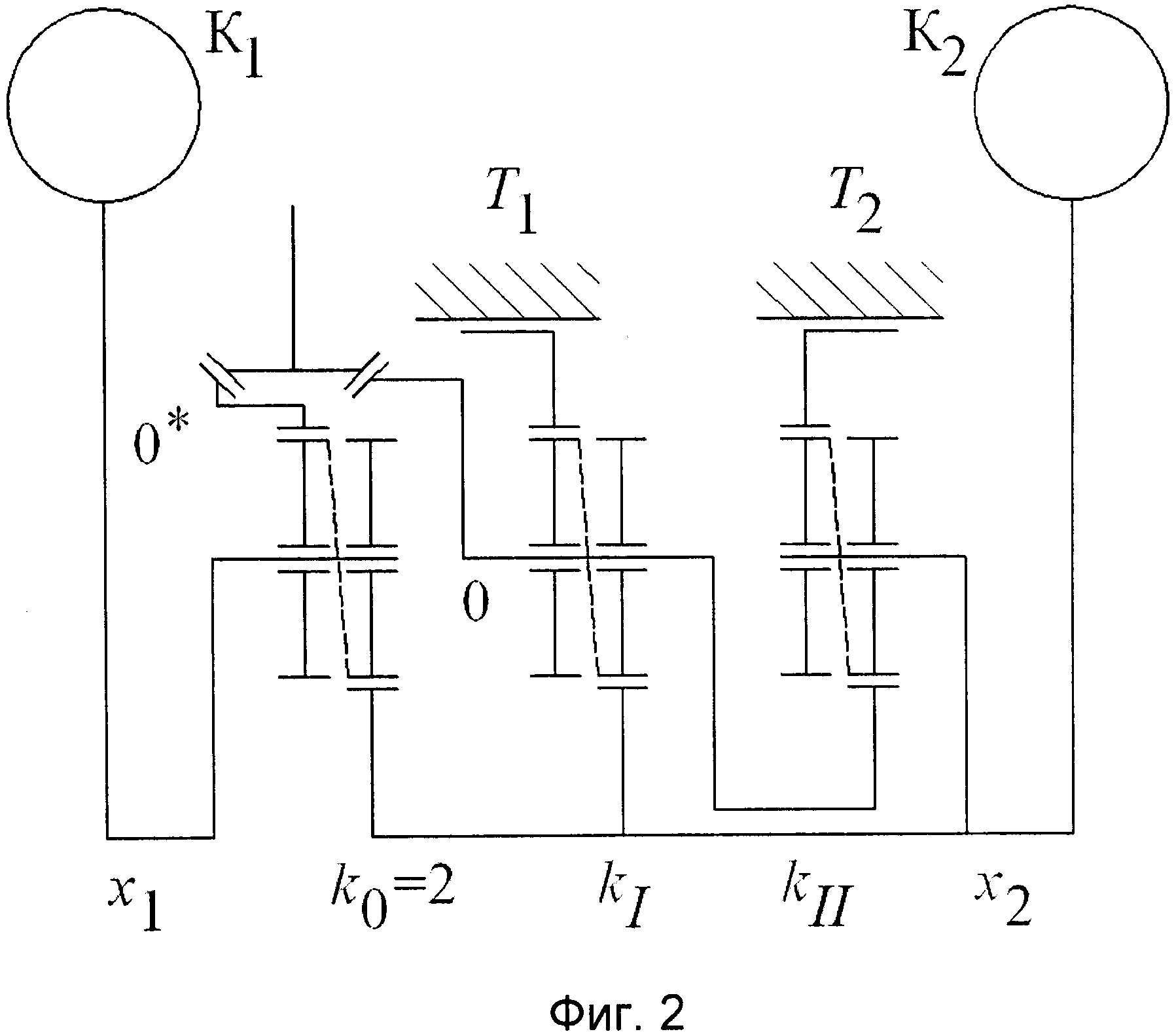
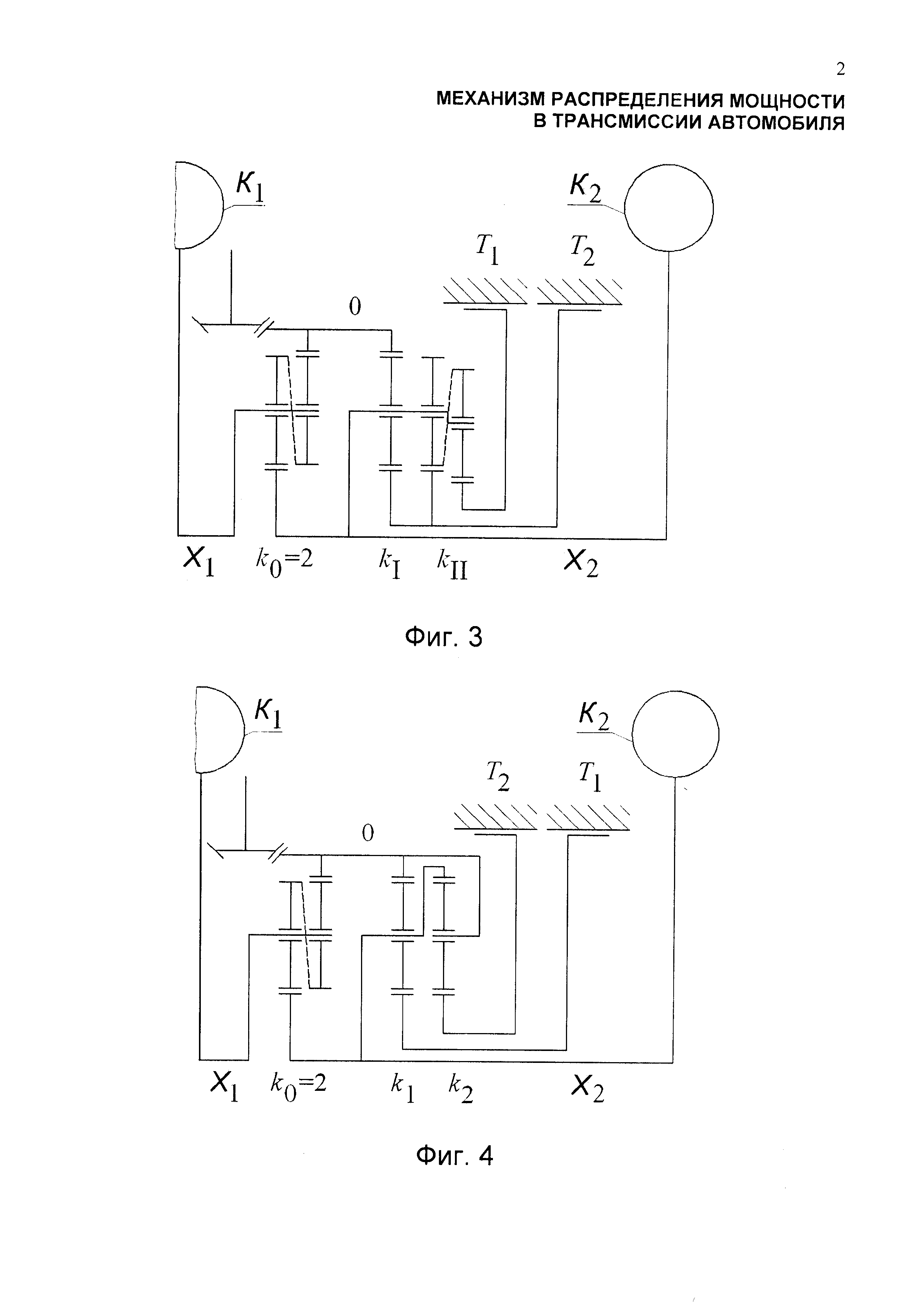
на фиг. 3 - кинематическая схема второго (по порядку и по авторскому рейтингу) варианта заявляемого механизма распределения мощности (МРМ-2), где обозначения аналогичны фиг. 2;
на фиг. 4 - кинематическая схема третьего (по порядку и по авторскому рейтингу) варианта заявляемого механизма распределения мощности (МРМ-3) где обозначения аналогичны фиг. 2, 3.
МРМ по любому из заявляемых частных вариантов конструктивного исполнения содержит (см. фиг. 1) редукторную часть R с двумя степенями свободы (короче - «двухстепенной редуктор»). Входное звено 0 редукторной части R (а значит и МРМ в целом) опосредованно связано с двигателем (не показано), а выходные звенья X1 и X2 опосредованно (будет показано на фиг. 2-4), например через полуоси автомобиля, связаны с ведущими колесами K1, K2 автомобиля. В составе МРМ предусмотрены тормоза T1, T2 (тормозные элементы, преимущественно дисковые) с возможностью дифференцированного тормозного воздействия на определенные (см. далее варианты) звенья редукторной части R, а также система управления СУ упомянутыми тормозами.
СУ реализует принципы электронного управления с использованием широтно-импульсной модуляции величины давления рабочей жидкости в бустерах тормозов (в гидросистеме) и, следовательно, в пятне контакта фрикционных поверхностей тормозных элементов (сдавливания дисков тормозов T1, T2) - ШИМД.
СУ учитывает (получает) при этом сигналы с датчиков частоты вращения ведущих колес K1, K2 автомобиля, информацию о тягово-скоростном режиме работы двигателя и трансмиссии, положении органов управления (прежде всего, рулевого колеса в составе рулевого механизма в обеспечение поворота управляемых колес автомобиля) и др., что позволяет реализовать оптимальное в текущих условиях движения управляющее воздействие на редукторную часть R.
Иначе говоря, объектами управления являются тормоза T1, T2, причем с дифференцированно-изменяемыми усилием и скважностью их срабатывания.
Редукторная часть R представляет собой, в общем случае, зубчатый планетарный редуктор с двумя степенями свободы. Его шестерни выполняются, предпочтительно, косозубыми или шевронными.
Редукторная часть R выполнена с планетарными зубчатыми рядами - нулевым «0», первым I и вторым II, с одноименными кинематическими параметрами k0, kI, kII. Входное звено редукторной части R соединено со звеньями, по меньшей мере, двух планетарных рядов. Нулевой ряд «0», непосредственно связанный с упомянутым входным звеном 0, является аналогом простого дифференциала (аналогично прототипу с коническим дифференциалом).
В заявляемом устройстве по первому (рекомендуемому в первую очередь) конструктивному варианту (см. фиг. 2) все три планетарных ряда выполнены со сдвоенными зубчатыми сателлитами (сдвоенность сателлитов для первого и второго планетарных рядов условно не показана), входное звено редукторной части R соединено со звеньями трех планетарных рядов - непосредственно с зубчатым эпициклом нулевого ряда (звено 0*, вращающегося со скоростью минус ω0 при положительной скорости звена 0), в параллель непосредственно с водилом первого ряда и, опосредованно через него, с зубчатым солнцем второго ряда. Водило нулевого планетарного ряда является первым выходным звеном X1 редукторной части R и соединено с ведущим колесом K1 одного борта автомобиля. Второй (в направлении от нулевого звена МРМ) зубчатый сателлит нулевого планетарного ряда через зубчатое солнце последнего вместе с зубчатым солнцем первого планетарного ряда и водилом второго планетарного ряда образуют второе выходное звено X2 редукторной части R, которое соединено с ведущим колесом K2 другого борта автомобиля. Зубчатый эпицикл первого планетарного ряда связан с подвижной частью (подвижными фрикционными дисками, то есть подвижными тормозными элементами) тормоза T1, а зубчатый эпицикл второго планетарного ряда связан с подвижной частью (подвижными фрикционными дисками, то есть подвижными тормозными элементами) тормоза T2. Кинематические параметры к всех трех планетарных рядов положительны (k0,1,2>0), а величина кинематического параметра k0 нулевого планетарного ряда равна двум (k0=2).
Пример: при минимальном радиусе поворота автомобиля 5 м и колее 1,8 м:
k1=2,18; k2=2,22 (принципиально не исключена унификация этих рядов: k1=k2, хотя и маловероятна).
В заявляемом устройстве по второму конструктивному варианту (см. фиг. 3) нулевой и второй планетарные ряды выполнены со сдвоенными сателлитами. Входное звено 0 редукторной части R через коническую зубчатую передачу соединено, односторонне и параллельно, с зубчатыми эпициклами нулевого и первого планетарных рядов. Водило нулевого планетарного ряда соединено с ведущим колесом K1 одного борта автомобиля. Эпицикл нулевого планетарного ряда посредством сдвоенного зубчатого сателлита и зубчатого солнца соединен, вместе с общим водилом первого и второго планетарных рядов, с ведущим колесом K2 другого борта автомобиля. Зубчатое солнце первого планетарного ряда вместе с первым зубчатым солнцем при первом (в направлении от нулевого звена МРМ) зубчатом сателлите второго планетарного ряда связано с тормозным элементом T2. Второе зубчатое солнце при втором (опять же в направлении от нулевого звена МРМ) зубчатом сателлите второго планетарного ряда связано с тормозным элементом T1. Кинематические параметры k1 и k2 соответственно первого и второго планетарных рядов отрицательны (k0,1,2<0), а кинематический параметр k0 нулевого планетарного ряда равен двум (k0=2).
Пример: при минимальном радиусе поворота автомобиля 5 м и колее 1,8 м:
k1=-4,545; k2=-0,727.
В заявляемом устройстве по третьему конструктивному варианту (см. фиг. 4) нулевой и второй планетарные ряды, как и в предыдущих двух конструктивных вариантах МРМ, выполнены со сдвоенными сателлитами. Входное звено 0 через коническую зубчатую передачу соединено, односторонне и параллельно, с зубчатыми солнцами нулевого и первого планетарных рядов, а также с водилом второго планетарного ряда. Водило нулевого планетарного ряда соединено с ведущим колесом K1 одного борта автомобиля. Второй сателлит нулевого планетарного ряда через зубчатое солнце последнего вместе с водилом первого и зубчатым эпициклом второго планетарных рядов соединены с ведущим колесом K2 другого борта автомобиля. Зубчатые солнца первого и второго планетарных рядов связаны с соответствующими упомянутыми тормозными элементами T1, T2. Кинематические параметры k1 и k2 соответственно первого и второго планетарных рядов отрицательны (k0,1,2<0), а кинематический параметр k0 нулевого планетарного ряда по-прежнему равен двум (k0=2).
Пример: при минимальном радиусе поворота автомобиля 5 м и колее 1,8 м:
k1=-4,545; k2=-5,25.
Возможны другие кинематические схемы и конструкции в рамках заявляемых основной и дополнительных совокупностей существенных признаков.
Устройство работает под электронным управлением. СУ получает сигналы с датчиков частоты вращения ведущих колес K1, K2 автомобиля, информацию о тягово-скоростном режиме работы двигателя и трансмиссии, положении органов управления и др., что позволяет реализовать оптимальное в данных условиях движения управляющее воздействие на редукторную часть R.
Планетарный ряд «0», характеризующийся кинематическим параметром k0=2, как оговаривалось ранее, выполняет функции простого дифференциала.
При полном включении тормоза T1 или T2 реализуется расчетный радиус поворота в соответствующую сторону, согласованный по величине с минимальным радиусом поворота, задаваемым кинематикой рулевой трапеции.
Планетарные ряды I и II предназначены для перераспределения мощности между ведущими колесами K1, K2 (соответственно, M1 ω1 и M2 ω2) ⋅по командам СУ.
Если рассогласование частот вращения ω1 и ω2 ведущих колес K1, K2 автомобиля незначительно (конкретное допустимое значение величины рассогласования определяется расчетом или, предпочтительнее, экспериментально в зависимости от технических характеристик шасси транспортного средства), МРМ выполняет функции простого дифференциала, элементы управления отключены.
Если по условиям движения необходима блокировка МРМ, одновременно включаются (включают) тормоза T1 и T2.
Перераспределение мощности осуществляется следующим образом.
Допустим, по условиям движения необходимо подать большую мощность на колесо K2, связанное со звеном X2. Это достигается за счет включения тормоза T2. При полном включении тормоза T2 реализуется максимальное передаточное отношение u1-2 между бортами. При частичном включении - в диапазоне от 1 до максимального. Аналогично МРМ перераспределяет мощность в пользу другого борта путем полного или частичного включения тормоза T1.
Устройство позволяет реализовывать ШИМД и, следовательно, управлять буксованием дисков тормозов и за счет этого получать оптимальное в данных эксплуатационных условиях передаточное отношение u1-2, а значит - нужное распределение сил тяги по колесам K1, K2 оси автомобиля (для межколесного дифференциала) или по осям автомобиля (для межосевого дифференциала).
В заявляемом устройстве нет ступенчатых сателлитов (за исключением второго ряда в третьем частном варианте) и фрикционных муфт (тормоз надежнее и проще муфты), а нагрузка на тормоза меньше. Следовательно, заявляемая конструкция технологичнее, проще, компактнее и разгруженнее прототипа.
Таким образом, заявляемое устройство, независимо от выбора того или иного частного варианта схемы и конструкции (в том числе вариантов 1-3), позволяет устранить отмеченные выше недостатки прототипа и улучшить технико-эксплуатационные (в приложении к колесным шасси гражданских транспортных средств) или тактико-технические характеристики (в приложении к колесным шасси военных и специальных транспортных средств).
Сравнивая три описанных частных варианта схем R как с прототипом, так и между собой, следует отметить следующие их особенности в отношении эффективности (положительные и отрицательные стороны).
Первый вариант отличается максимальной компактностью конструкции, но наличие в нем сдвоенных сателлитов (широкий и узкий в паре с ним), причем во всех трех планетарных рядах является относительно несущественной «платой» за преимущества.
Во втором варианте улучшена компоновка тормозов и проще конструкция второго ряда - без сдвоенных сателлитов. К недостаткам (не порочащим положительный технический результат и целесообразность использования) можно отнести разброс более чем в два раза наибольших диаметров смежных планетарных рядов, а также относительно сложную конструкцию второго планетарного ряда.
Третий вариант отличается максимальной технологичностью конструкции (за счет применения простых планетарных механизмов), но она имеет относительно большой радиальный габарит (что также не является основанием для ее отбраковки).
Способ диагностики онкологических заболеваний
Способ планирования задач предобработки данных интернета вещей для систем анализа
Композиционное полимерное раневое покрытие на основе нановолокон
Способ изготовления меза-структуры полоскового лазера
Способ экспериментальной оценки терапевтического воздействия фокусированного ультразвука на сосуды животных
Способ получения магнитотвердого материала
Способ обнаружения скрытых взаимосвязей в интернете вещей
Цифровой способ измерения фазы гармонического сигнала
Магнетронная распылительная головка
Бортовая насосная станция систем смазки и гидравлического управления наземного транспортного средства
Способ диагностики онкологических заболеваний
Способ планирования задач предобработки данных интернета вещей для систем анализа
Привод транспортного средства с двухпоточным бесступенчатым механизмом передач и поворота
Бортовая насосная станция систем смазки и гидравлического управления наземного транспортного средства
Привод электрического генератора в составе самоходного наземного транспортного средства
18-скоростная механическая вальная коробка передач, преимущественно для трактора
Шарообразный робот (варианты)
Многовальная коробка передач "ромашка"
Гибридный механизм распределения мощности в трансмиссии транспортной машины
24-режимная однопоточная вальная коробка передач "конфигурация-24"

