Результат интеллектуальной деятельности: Захватный корректирующий модуль
Вид РИД
Изобретение
Предлагаемое устройство относится к области машиностроения, роботостроения и может использоваться для коррекции положения преимущественно плоских изделий при их захвате из стандартной тары. Наиболее эффективно применение устройства с использованием вакуумных и электромагнитных захватов.
Известны захватные модули (см. а.с. №1013266, МКИ B25J 15/00, а.с.№1063589, МКИ B25J 15/00), которые корректируют положение изделия, расположенного на рабочей поверхности, а затем захватывают его и поднимают. Недостатком данных устройств является ограниченная область применения, так как требуемому смещению положения изделия может помешать наличие неровностей рабочей поверхности.
Известны вакуумные захватные модули, содержащие корпус, в котором размещен захват с приводом его вертикального перемещения. Причем на корпусе установлены направляющие с заходной частью под захватываемое изделие (Сысоев С.Н., Черкасов Ю.В. Агрегатно-модульное захватное устройство робота // Механизация и автоматизация производства. - 1987. - №1. - С. 3, патент РФ 2256549, МПК B25J 15/06, Сысоев С.Н., Жиров М.Ю.).
Данные устройства корректируют положение изделия силовым воздействием на изделие заходной частью направляющих. Однако возможная величина коррекции положения изделия незначительна.
Известны захватные корректирующие модули (см. пат. RU №2431561 U1, МПК B25J 15/06 «Вакуумный захватный корректирующий модуль», заявка №2009145337/02, заявл. 07.12.09, опубл. 20.10.11, Сысоев С.Н., Пронин А.В., Александров И.В., Пасечник М.А.).
Устройство содержит механическую руку, в которой размещен привод вертикального перемещения с шарнирно установленным концом рабочего органа и вакуумным захватом. Устройство также имеет направляющие под захватываемое изделие и снабжено ограничителями хода рычагов, закрепленных по периметру на уплотнительном элементе с возможностью отведения его от поверхности изделия при перекосах присоски. При превышении определенного угла перекоса корпуса захвата выполняется «отпускание» изделия.
В данном устройстве устранен недостаток взаимосвязи усилия удержания изделия и усилия привода вертикального перемещения, что повышает надежность выполнения пошагового корректирующего смещения положения изделия, однако величина корректирующего смещения незначительна.
Наиболее близким по технической сущности из известных устройств является захватный корректирующий модуль (см. пат. RU №129044 C2, МПК B25J 15/06 «Захватный корректирующий модуль», заявка №2012157839/02, заявл. 27.12.12, опубл. 20.06.13, Сысоев С.Н., Корегин А.Н., Осипов В.А., Претека Н.В.).
Устройство содержит корпус с направляющими элементами и фиксаторами под захватываемое изделие, захват с приводом перемещения захвата. Захват закреплен на подвижном рабочем органе привода с возможностью перекоса и подпружинен относительно среднего положения, а между захватом и подвижным рабочим органом установлен механизм коррекции, который выполнен в виде упругого гибкого стержня с возможностью изгиба при силовом взаимодействии изделия с направляющими элементами в процессе его подъема. При силовом взаимодействии изделия с направляющими выполняется коррекция его положения относительно корпуса.
В данном устройстве увеличена зона возможного корректирующего смещения положения изделия в захватном модуле. Однако отсутствие регулировки упругости гибкого стержня ограничивает область применения захватного корректирующего модуля. Например, подъем изделия, имеющего смещенный центр тяжести относительно захвата, может привести к перекосу изделия до момента силового воздействия с направляющими, что не позволит выполнить требуемую функцию коррекции.
Таким образом, данное устройство, также как и все известные, имеет ограниченную область применения по номенклатуре захватываемых изделий.
Задачей изобретения является расширение области применения путем расширения номенклатуры захватываемых изделий.
Поставленная задача достигается тем, что в захватном корректирующем модуле, включающем корпус с направляющими элементами и фиксаторами под захватываемое изделие, а также привод перемещения захвата, закрепленного на подвижном рабочем органе привода с возможностью перекоса и подпружиненного относительно среднего положения, а между захватом и подвижным рабочим органом установлен механизм коррекции, выполненный в виде упругого гибкого стержня с возможностью изгиба при силовом взаимодействии изделия с направляющими элементами в процессе его подъема, гибкий стержень выполнен в виде спиральной пружины, внутри которой установлена тяга, одним концом соединенная с захватом, а другим - через механизм натяжения с подвижным рабочим органом.
Тяга может быть выполнена в виде шариковой цепочки, что обеспечивает сохранение силового воздействия тяги на гибкий стержень по его оси в процессе изгиба.
Механизм натяжения тяги может быть выполнен в виде пружины растяжения, установленной с возможностью регулировки осевого положения крепления на подвижном рабочем органе привода относительно захвата, что позволяет задавать требуемую упругость гибкого стержня для работы с конкретными изделиями на различных этапах функционирования устройства.
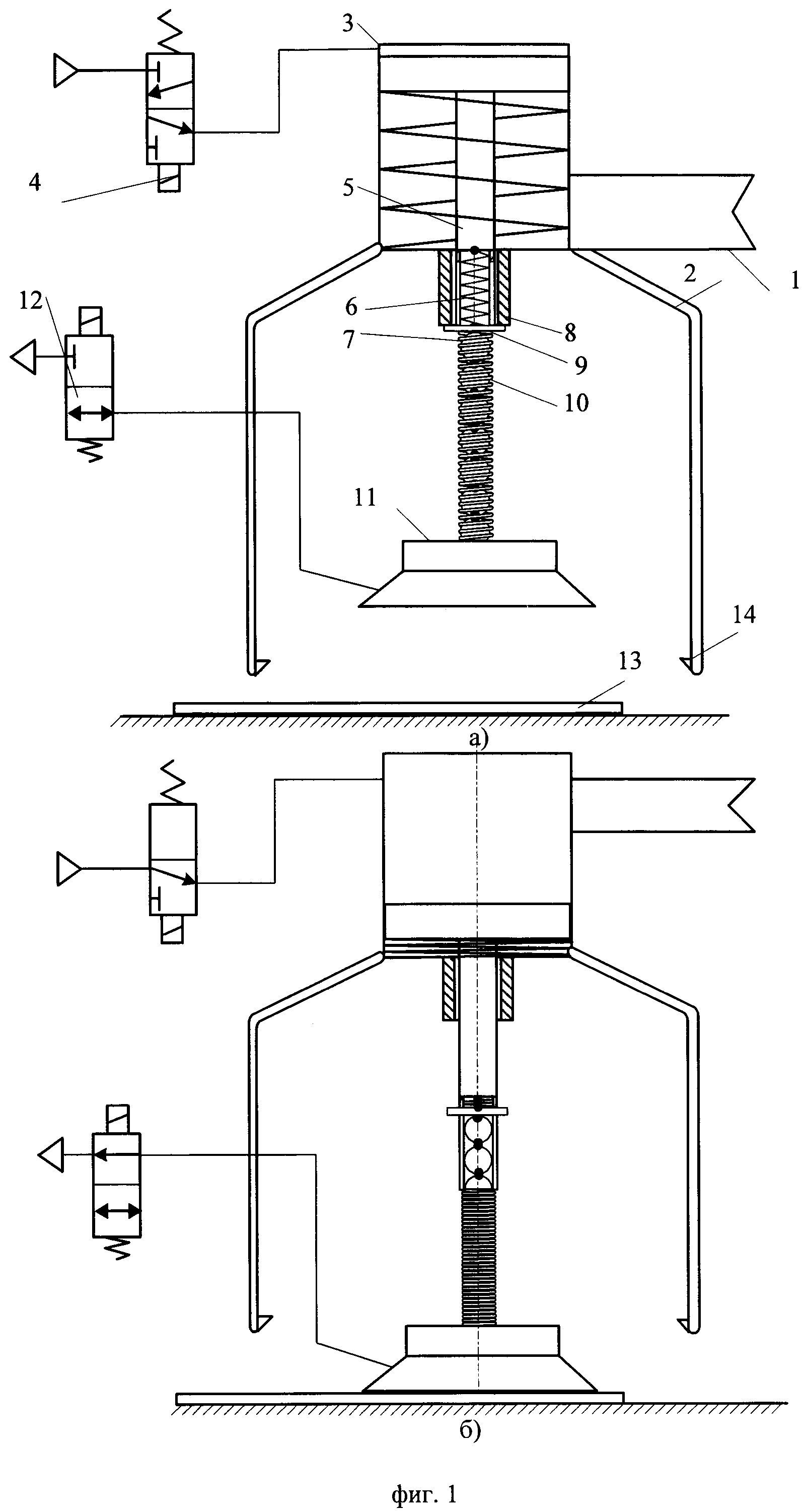
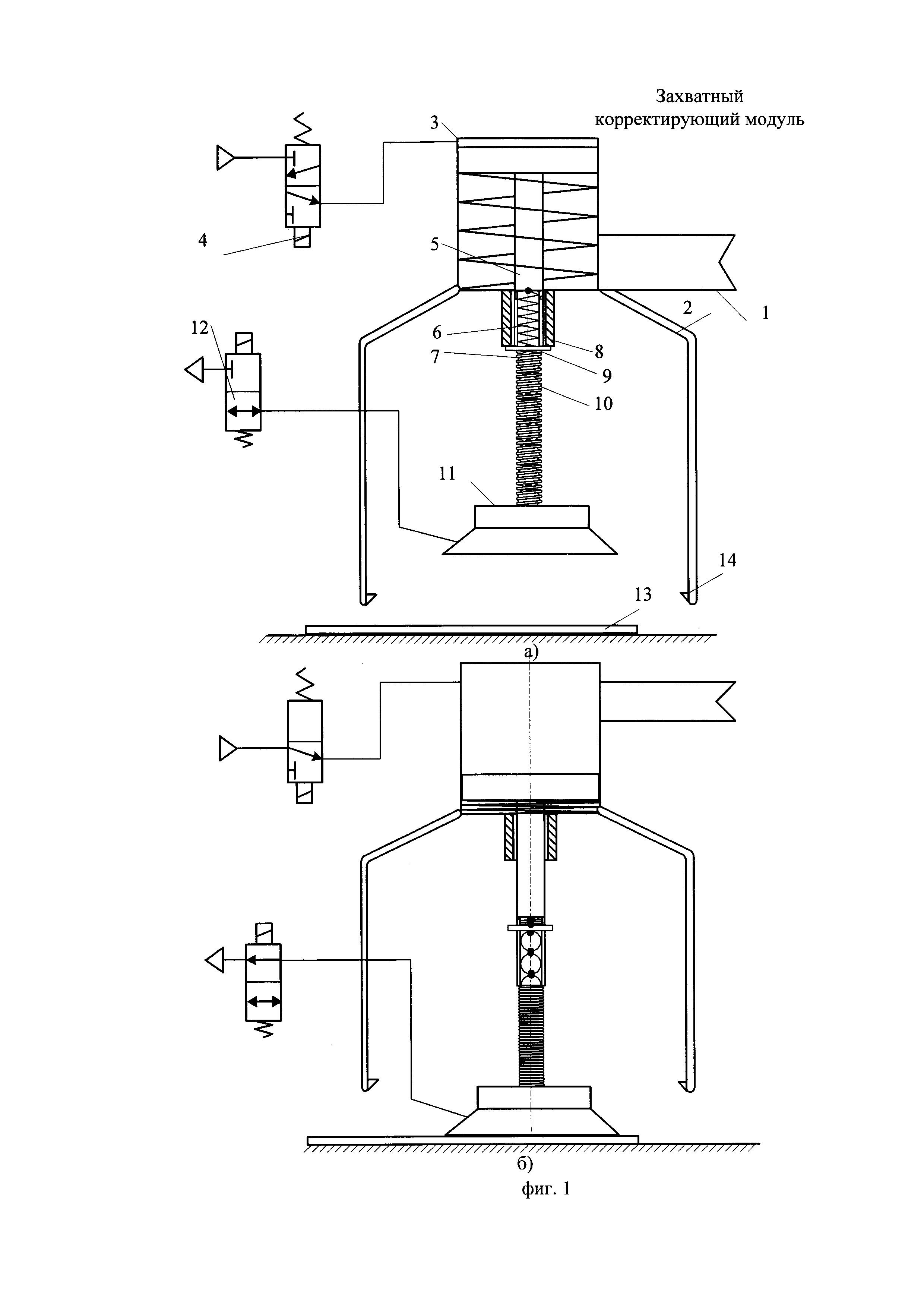
Пример реализации устройства показан на чертеже фиг. 1, поз. а, б.
Устройство состоит (фиг. 1, поз. а) из корпуса 1 с установленными на нем направляющими элементами 2, а также привод 3 перемещения захвата с подвижным рабочим органом. Привод выполнен в виде пневмоцилиндра одностороннего действия с подпружиненной штоковой полостью. Поршневая полость соединена с пневмолинией избыточного давления воздуха через распределитель 4. На подвижном рабочем органе 5 привода через пружину растяжения 6 закреплена тяга 7, выполненная в виде шариковой цепочки.
На корпусе установлена ограничительная втулка 8, выполненная с возможностью взаимодействия с упором 9, закрепленным на тяге 7. Тяга расположена внутри спиральной пружины 10, закрепленной одним концом с ограничительной втулкой 8, а другим - с корпусом вакуумного захвата 11, рабочая камера которого выполнена с возможностью соединения с атмосферой или с линией пневмопитания разрежения воздуха через распределитель 12. Устройство захватывает и корректирует положение изделия 13, устанавливая его на фиксаторы 14, закрепленные на концах направляющих 2.
Верхнее положение (фиг. 1, поз. а) подвижный рабочий орган привода занимает, когда распределители 4 и 12 отключены, поршневая полость пневмоцилиндра соединена с атмосферой, а рабочая полость захвата не соединена с линией разрежения воздуха. При этом пружина 6 растянута, так как упор 9 взаимодействует с ограничительной втулкой 8, и так как тяговое усилие на шариковой цепочке незначительно, то изгибная упругость спиральной пружины - незначительна.
Нижнее положение (фиг. 1, поз. б) подвижный рабочий орган привода занимает, когда распределитель 4 включен, поршневая полость пневмоцилиндра соединена с избыточным давлением воздуха. При этом пружина 6 оказывает силовое воздействие на тягу 7, сжимая по оси пружину 10, увеличивая изгибную упругость.
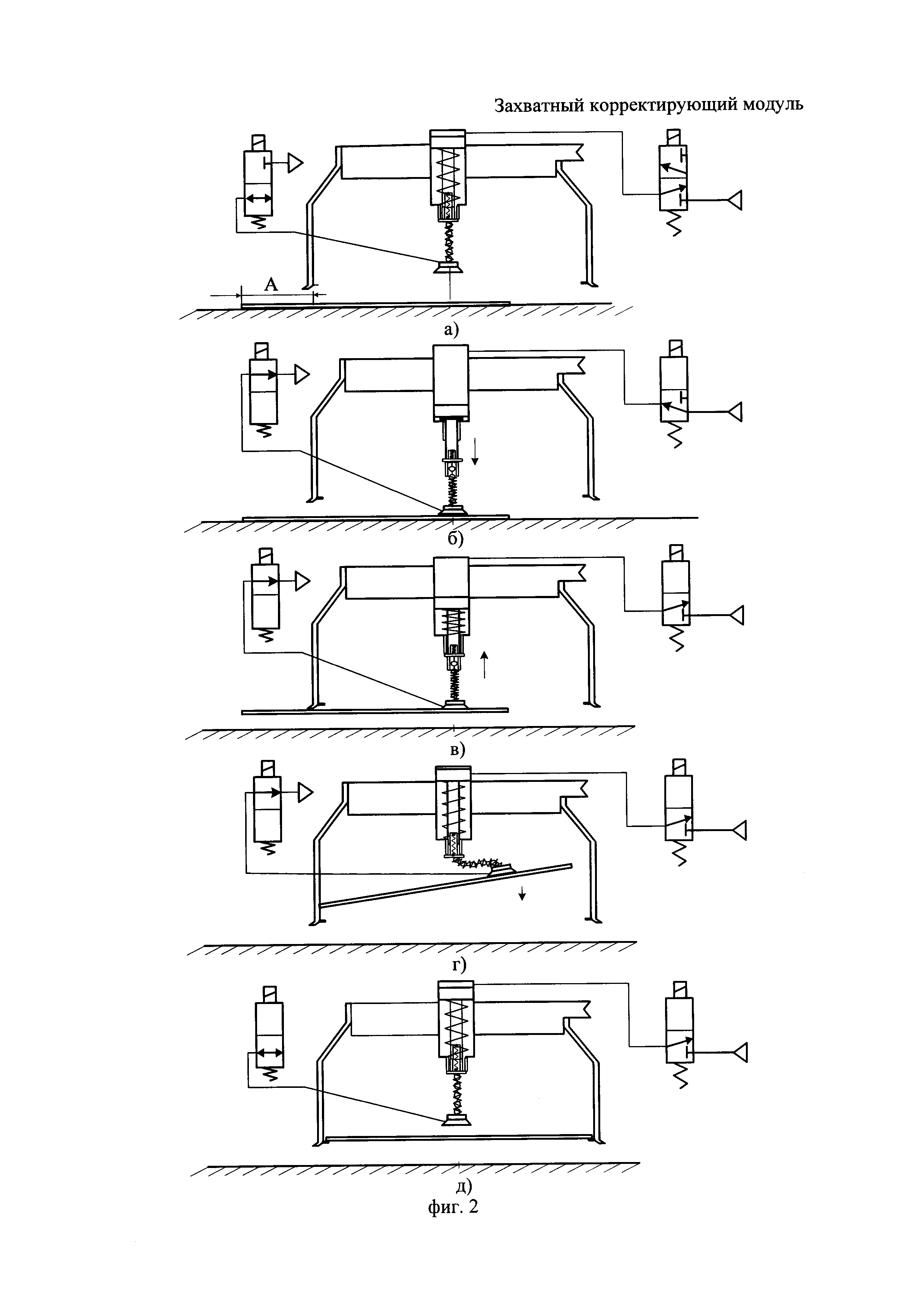
Пример этапов работы устройства показан на чертеже фиг. 2, поз. а, б, в, г, д.
Устройство работает следующим образом.
В исходном положении (фиг. 2, поз. а) распределители отключены. Поршневая полость пневмоцилиндра соединена с атмосферой, а рабочая полость захвата не соединена с линией разрежения воздуха. Подвижный рабочий орган с захватом занимает верхнее положение.
По команде «взять изделие правильно» поршневая полость пневмоцилиндра соединяется с пневмолинией избыточного давления воздуха (фиг. 2, поз. б). Под действием усилия, создаваемого величиной избыточного давления, подвижный рабочий орган привода с захватом опускается к поверхности изделия. При этом изгибная упругость гибкого вала максимальна.
Далее создают давление разрежения воздуха, выполняется захват изделия, а затем соединяют поршневую полость пневмоцилиндра с атмосферой. В результате этого начинается подъем захваченного изделия (фиг. 2, поз. в). Величина изгибной упругости гибкого вала предотвращает перекос изделия в результате воздействия смещенного центра тяжести изделия относительно захвата. При приближении изделия к направляющим уменьшается силовое воздействие тяги на спиральную пружину и уменьшается величина ее изгибной упругости. Так как изделие смещено относительно требуемого положения влево, то оно соприкасается с левым направляющим. В результате их силового взаимодействия в процессе продолжающегося подъема подвижного рабочего органа происходит не только поворот захвата против часовой стрелки, но и перемещение корпуса захвата с изделием в направлении перекоса (фиг. 2, поз. г). Изделие перемещается в сторону требуемой коррекции его положения до тех пор, пока не переместится за левый фиксатор. Изделие заходит в направляющие. После этого соединяют рабочую полость захвата с атмосферой, и захват отпускает изделие. В результате оно, перемещаясь, занимает требуемое положение (фиг. 2, поз. д), а подвижный рабочий орган с захватом - исходные положения.
Предлагаемое техническое решение позволяет организовывать требуемую изгибную упругость гибкого вала в процессе работы устройства, что увеличивает область его применения путем расширения номенклатуры захватываемых изделий.
В лаборатории автоматизации производственных процессов Владимирского государственного университета проводились макетирование и натурные испытания предлагаемого устройства.
Испытания подтвердили эффективность предлагаемого технического решения.
Захватный корректирующий модуль
Электромагнитный захватный агрегатный модуль
Способ работы мембранного привода с жесткими центрами
Установка для испытания образцов на усталость
Способ сборки деталей типа вал-втулка
Плоский шлифовальный круг и способ его изготовления
Редуктор-шарнир
Шаровая планетарная мельница для высокоэнергетического измельчения материалов
Способ работы привода с рекуперацией механической энергии
Захватный корректирующий модуль
Мембранный привод
Захватный корректирующий модуль
Вакуумный захватный агрегатный модуль
Мембранный привод
Вакуумный захватный агрегатный модуль
Нога шагающего аппарата
Привод криволинейного перемещения
Привод криволинейного перемещения
Камерный привод

