Результат интеллектуальной деятельности: Способ приведения автономного необитаемого подводного аппарата
Вид РИД
Изобретение
Изобретение относится к области гидроакустических навигационных систем, а более конкретно к способам приведения автономных необитаемых подводных аппаратов при помощи гидроакустических средств. Предлагаемый способ предназначен для приведения подводного аппарата к источнику опорных сигналов с использованием минимального набора регистрируемых данных.
Известен способ приведения автономного подводного аппарата, описанный в [1], а также в описательной части патента на изобретение РФ 2460043, 2011 г., МПК G01С 23/00, как альтернативное изобретение. Описываемый способ является частью решения по навигации автономных необитаемых подводных аппаратов. В известном способе задача приведения решается при наличии акустического контакта в ближней зоне приведения. При использовании для приведения маяка-излучателя дистанция Lt от маяка до аппарата определяется как произведение времени dt2 распространения сигнала по трассе и скорости звука Vs. В случае применения маяка-ответчика известно только общее время распространения сигнала (dt12=dt1+dt2) от АНПА до маяка dt1 и обратно к АНПА dt2. Поэтому при расчете дистанции до маяка-ответчика берется половина временной задержки dt1,2. Координаты АНПА по счислению пути в случае с маяком-излучателем соответствуют местоположению АНПА в момент приема сигнала от маяка s=[Xt2,Yt2,Zt2], а в случае с маяком-ответчиком - среднему положению аппарата S=([Xt2,Yt2,Zt2]+[Xa,Yt1,Zt1]m)/2 между посылкой t1 и приемом t2 акустического сигнала. Так как глубины аппарата и маяка известны, то требуется определить только местоположение источника сигнала в горизонтальной проекции на эту плоскость вектора между положением АНПА и положением маяка:

где Rt - расстояние до маяка в плоскости (X,Y) в момент времени t; Lt - расстояние до маяка в трехмерном пространстве (X,Y,Z) в момент времени t; Zt - глубина АНПА в момент времени t; Zмаяк - глубина постановки маяка.
Определение направления на маяк по дистанции до него и данным системы счисления пути осуществляется в следующем порядке.
При определении направления (пеленга) на маяк предполагается, что отклики от источника сигнала обладают погрешностью, имеющей нормальный закон распределения с математическим ожиданием, равным нулю (2):

где p - функция распределения погрешности измерения дистанции; σ - среднеквадратичное отклонение погрешности; r - вектор истинного местоположения маяка относительно АНПА; R - измеренная дистанция до маяка; (R-|r|) - погрешность измерения дистанции. В соответствии с принятой моделью определения пеленга на маяк при использовании трех откликов по положению АНПА (по счислению пути) в моменты определения дистанции до маяка строят «кольца», соответствующие вероятному местоположению источника сигнала для каждого из положений подводного аппарата. Радиусы этих колец равны измеренным согласно (1) дистанциям до маяка в горизонтальной плоскости, ширина соответствует погрешности измерения дальности (при этом «размытость» колец определяется видом функции p), а центры совпадают с координатами АНПА в момент определения дистанции.
Местонахождением маяка считается область пересечения наибольшего числа колец. Поэтому общая оценка вероятности нахождения маяка в любой точке пространства рассчитывается как суперпозиция оценок от каждого отклика, а пеленг на маяк <pt определяется исходя из максимизации этой суперпозиции для некоторого количества откликов N:

Поскольку координаты маяка относительно АНПА rn=q-sn, а его местоположение в системе счисления пути определяется выражением q=st+rt (для любого t), то пеленг на маяк может быть найден из:

где rt - местоположение маяка относительно АНПА в момент определения пеленга.
В свою очередь, местоположение маяка rt относительно АНПА в любой момент времени определяется исходя из дистанции до него Rt и пеленга <pt:

Таким образом, для выбора направления на маяк в момент времени t достаточно определить, при каком <р выражение (4) принимает максимум, используя (5) для расчета  . Можно принять, что необходимая точность определения направления на маяк не превышает 1. При этом процедура вычислений выполняется только при получении нового отклика (два раза в минуту). Тогда для нахождения максимума можно ограничиться простым перебором (р от 0° до 360°) с шагом в 1°. Кроме того, значение выражения (4) дает представление о «степени уверенности» в правильности определения пеленга. Чем больше это значение, тем «вероятнее», что пеленг рассчитан точно (многие отклики подтверждают нахождение маяка в данной точке). Малые значения этой оценки говорят о наличии сбойных данных в величине Rt или массиве Rt.
. Можно принять, что необходимая точность определения направления на маяк не превышает 1. При этом процедура вычислений выполняется только при получении нового отклика (два раза в минуту). Тогда для нахождения максимума можно ограничиться простым перебором (р от 0° до 360°) с шагом в 1°. Кроме того, значение выражения (4) дает представление о «степени уверенности» в правильности определения пеленга. Чем больше это значение, тем «вероятнее», что пеленг рассчитан точно (многие отклики подтверждают нахождение маяка в данной точке). Малые значения этой оценки говорят о наличии сбойных данных в величине Rt или массиве Rt.
Одним из недостатков способа является то, что объект навигации должен быть оснащен инерциальной навигационной системой определения координат, которая, как известно, обладает мультипликативной ошибкой. Другим недостатком является необходимость предварительного поиска пеленга на маяк при движении аппарата по круговой или иной сложной траектории. К недостаткам описываемого способа приведения также следует отнести необходимость получения трех откликов от маяков.
Известен способ приведения автономного необитаемого подводного аппарата с использованием системы экстремального регулирования (СЭР), описанный в статье [2]. В нем для приведения используется один маяк, внутренняя система отсчета которого синхронизирована с системой отсчета аппарата, либо используется система типа маяк ответчик (двухпроходной способ приема и передачи сигнала). По ходу движения аппарат регистрирует опорные сигналы от маяка и вычисляет время распространения сигнала τ. Приведение аппарата осуществляется путем поддержания СЭР значения угла пеленга на маяк α, при котором разница времени распространения опорного сигнала от маяка δ=Δτ(α) максимальная.
Этот способ приведения автономного необитаемого подводного аппарата с использованием СЭР по своему функциональному назначению, по своей технической сущности и достигаемому результату наиболее близок заявленному и принят за прототип.
Недостатком способа-прототипа являются необходимость синхронизации приемного и принимающего оборудования, а также увеличение ошибки ввиду двухпроходного способа приема и передачи сигнала.
Задачей, на решение которой направлено заявляемое изобретение, является сокращение до минимума набора регистрируемых параметров, необходимых для приведения подводного аппарата, при отсутствии синхронизации между маяком и подводным аппаратом.
Технический результат достигается тем, что для приведения автономного необитаемого подводного аппарата используется один опорный гидроакустический маяк, излучающий сигналы через равные промежутки времени, для аппарата задается постоянная скорость движения  , аппарат принимает сигналы от маяка, с помощью СЭР производится поиск оптимального угла пеленга на маяк; согласно изобретению производят настройку маяка на периодическое излучение двух типов фазоманипулированных шумоподобных сигналов S1 и S2 с мощностью P(S1)>P(S2) и периодом T(S1)≥T(S2); по ходу движения аппарата регистрируют сигналы с помощью многоканального приемника, каждый из каналов которого настроен на определенное изменение длительности и частоты сигналов S1 и S2, вызванное влиянием эффекта Допплера; путем анализа корреляционной функции в каждом из каналов с помошью селектора максимума идентифицируют сигнал и производят оценку скорости взаимного сближения аппарата и маяка
, аппарат принимает сигналы от маяка, с помощью СЭР производится поиск оптимального угла пеленга на маяк; согласно изобретению производят настройку маяка на периодическое излучение двух типов фазоманипулированных шумоподобных сигналов S1 и S2 с мощностью P(S1)>P(S2) и периодом T(S1)≥T(S2); по ходу движения аппарата регистрируют сигналы с помощью многоканального приемника, каждый из каналов которого настроен на определенное изменение длительности и частоты сигналов S1 и S2, вызванное влиянием эффекта Допплера; путем анализа корреляционной функции в каждом из каналов с помошью селектора максимума идентифицируют сигнал и производят оценку скорости взаимного сближения аппарата и маяка  ; полученную оценку подают на вход СЭР, которая производит управление движительно-рулевым комплексом аппрата с целью поиска и поддержания курса, соответствующего максимальному значению
; полученную оценку подают на вход СЭР, которая производит управление движительно-рулевым комплексом аппрата с целью поиска и поддержания курса, соответствующего максимальному значению  ; при регистрации сигнала S2 уменьшают скорость движения аппарата ; при получении отрицательной оценки
; при регистрации сигнала S2 уменьшают скорость движения аппарата ; при получении отрицательной оценки  на выходе селектора максимума (прохождении аппаратом точки расположения маяка) производят остановку подводного аппарата.
на выходе селектора максимума (прохождении аппаратом точки расположения маяка) производят остановку подводного аппарата.
Существенными отличительными от способа-прототипа признаками являются: 1) не производится синхронизация внутренних систем отсчета подводного аппарата и источника опорных сигналов; 2) для приведения используется один входной параметр - оценка скорости взаимного сближения аппарата и маяка; 3) Оценка скорости производится аппаратно многоканальным приемником опорных сигналов с селектором максимума, без нагрузки на бортовой компьютер; 4) Для точного приведения используется два типа сигналов разной мощности и частоты излучения.
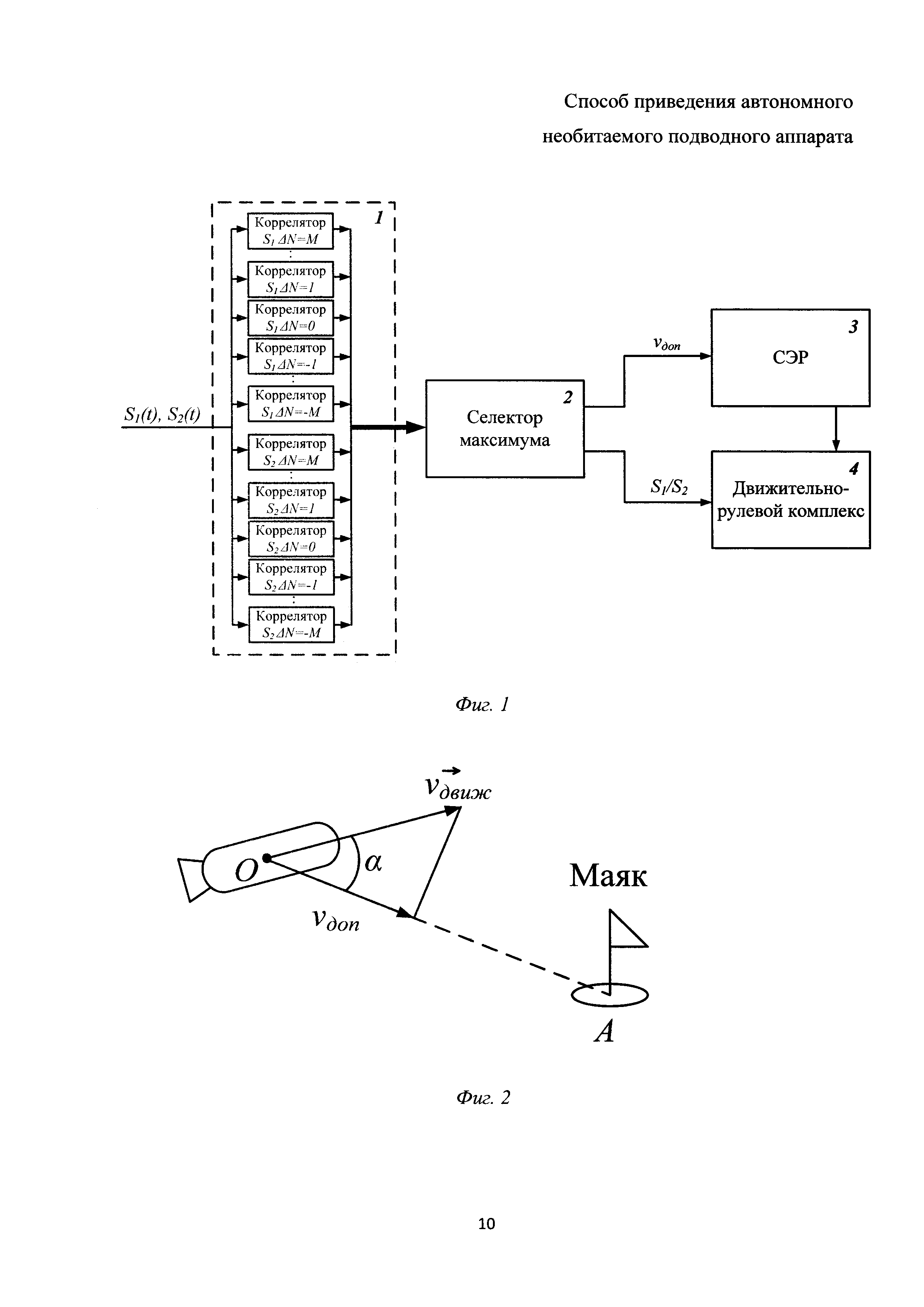
Сущность изобретения поясняется чертежом, где на фиг. 1 изображена структурная схема реализации способа приведения автономного необитаемого подводного аппарата.
На схеме показаны: 1 - многоканальный приемник фазоманипулированных шумоподобных сигналов, в состав которого входит два набора каналов для сигналов S1 и S2; 2 - селектор максимума, который производит иденификацию сигнала S1 или S2 и вычисляет оценку скорости взаимного сближения аппарата и маяка ; 3 - система экстремального регулирования СЭР, регулирующая измерения и формирующая управляющие воздействия на движительно-рулевой комплекс аппарата - 4.
Способ приведения автономного необитаемого подводного аппарата реализуется следующим образом.
Аппарат находится в точке О на некотором расстоянии от гидроакустического маяка - источника опорных сигналов, расположенного в точке А (Фиг. 2), где α - угол пеленга на маяк. В точке О аппарат принимает ГА сигнал от маяка. Крайние соотношения между вектором скорости  и его проекцией на ось OA в зависимости от угла α:
и его проекцией на ось OA в зависимости от угла α:
- α=0 - движение прямым курсом на маяк, т.е.  ;
;
- α=±π/2 - АНПА движется по окружности вокруг маяка, т.е.  ;
;
- α=±π - движение строго от маяка, т.е.  .
.
Статическая характеристика зависимости функции  от угла пеленга на маяк α имеет экстремальный характер (Фиг. 3). Задача приведения сводится к тому, чтобы поддерживать значение
от угла пеленга на маяк α имеет экстремальный характер (Фиг. 3). Задача приведения сводится к тому, чтобы поддерживать значение  .
.
Для вычисления оценки используют многоканальный приемник гидроакустических сигналов 1 имеющий в своем составе две группы каналов, одна для сигнала S1 и другая для S2 и селектор максимума 2. Каждый канал в группе настроен на определенное изменение длительности и частоты сигнала, вызванное влиянием эффекта Допплера.
Согласно явлению эффекта Доплера частота сигнала, регистрируемого в момент движения по направлению к источнику, линейно зависит от скорости приемника:

где  - скорость распространения ГА сигнала;
- скорость распространения ГА сигнала;  - частота сигнала, испускаемого источником;
- частота сигнала, испускаемого источником;  - частотный сдвиг, вызванный влиянием эффекта Доплера.
- частотный сдвиг, вызванный влиянием эффекта Доплера.
В случае движение в направлении от источника значение  станет отрицательным и правая часть выражения (6) будет содержать знак минус. Таким образом, проанализировав величину отклонения частоты сигнала, можно получить оценку скорости
станет отрицательным и правая часть выражения (6) будет содержать знак минус. Таким образом, проанализировав величину отклонения частоты сигнала, можно получить оценку скорости  , а также однозначно сказать, приближается ли АНПА к опорному маяку или удаляется от него.
, а также однозначно сказать, приближается ли АНПА к опорному маяку или удаляется от него.
Для однозначного определения частотного смещения сигнала при неизвестном значении временного смещения функция неопределенности должна иметь «кнопочный» вид как, например, у сложного фазоманипулированного сигнала. База сигнала подбирается из желаемого разрешения по частоте и скорости сближения.
При реализации дискретной системы выражение для вычисления скорости движения будет иметь следующий вид:

где ΔN - это изменение длительности сигнала, выраженное в периодах частоты дискретизации; τ - длительность сигнала;  - частота дискретизации.
- частота дискретизации.
Многоканальный приемник 1, каждый канал которого настроен на определенное смещение длительности и частоты сигнала, позволяет получить оценку ΔN путем выбора канала с наибольшим значение корреляционной функции. Выборка канала производится селектором максимума 2, который определяет тип сигнала исходя из того, к какой группе S1 или S2 относится канал с наибольшей корреляционной функцией, и преобразует значение ΔN в соответствии с формулой (7) в оценку скорости  .
.
Оценка  с селектора 2 поступает на вход СЭР 3. Задача СЭР - нахождение и поддержание оптимального курса движения АНПА, при котором
с селектора 2 поступает на вход СЭР 3. Задача СЭР - нахождение и поддержание оптимального курса движения АНПА, при котором  , система формирует управляющие воздействия на движительно-рулевой комплекс аппарата 4.
, система формирует управляющие воздействия на движительно-рулевой комплекс аппарата 4.
Принцип работы СЭР АНПА поясняется чертежом, представленным на фиг. 4. Аппарат начинает движение с точки М1 на графике поиска экстремума в системе экстремального регулирования. Аппарат движется с фиксированным шагом угла поворота β и после регистрации сигнала S1(t)/S2(t), получает оценку . Если в ходе поворота скорость уменьшилась, то СЭР меняет направления поворота. Если происходит увеличение скорости сближения, то СЭР продолжает поворот в установленном направлении. Таким образом, АНПА выходит на курс на маяк и  (точка М2 на графике), при этом продолжение поворота приведет к уменьшению . При достижении
(точка М2 на графике), при этом продолжение поворота приведет к уменьшению . При достижении  порогового значения δ (точка М3 на графике) СЭР изменит направление поворота. Движение аппарата продолжается до тех пор, пока не будет зафиксировано удаление после сближения с маяком, то есть
порогового значения δ (точка М3 на графике) СЭР изменит направление поворота. Движение аппарата продолжается до тех пор, пока не будет зафиксировано удаление после сближения с маяком, то есть  .
.
Для приведения используется два сигнала S1(t) и S2(t). Сигнал S2(t) отличается меньшей мощностью и более высокой частотой излучения для точного приведения в ближней зоне источника опорных сигналов. При устойчивом приеме сигнала S2(t) производится уменьшение скорости движения АНПА  .
.
Главным достоинством заявленного способа является его высокая надежность. Способ может быть использован для надежного приведения АНПА даже в ситуации выхода из строя (или отключения в целях энергосбережения) практически всех систем бортового навигационного комплекса, таких как: гидроакустическая навигационная система, инерциальная навигационная система, доплеровский лаг и т.д.
Источники литературы
1. Павин A.M. Автоматическое приведение автономного подводного робота к гидроакустическому маяку // Подводные исследования и роботехника. 2008, №5 (1), с. 32-38.
2. Бурдинский И.Н. Алгоритм приведения автономного подводного аппарата к источнику сигнала с использованием экстремального регулятора / И.Н. Бурдинский, Ф.В. Безручко // Информатика и системы управления. 2011. №1 (27). С. 121-129.
Способ приведения автономного необитаемого подводного аппарата, при котором используется один опорный гидроакустический маяк, излучающий сигналы через равные промежутки времени, для аппарата задается постоянная скорость движения ν, аппарат принимает сигналы от маяка, с помощью системы экстремального регулирования (СЭР) производится поиск оптимального угла пеленга на маяк; отличающийся тем, что производят настройку маяка на периодическое излучение двух типов фазоманипулированных шумоподобных сигналов S и S с мощностью P(S)>P(S) и периодом T(S)≥T(S); по ходу движения аппарата регистрируют сигналы с помощью многоканального приемника, каждый из каналов которого настроен на определенное изменение длительности и частоты сигналов S и S, вызванное влиянием эффекта Допплера; путем анализа корреляционной функции в каждом из каналов с помощью селектора максимума идентифицируют сигнал и производят оценку скорости взаимного сближения аппарата и маяка ν; полученную оценку подают на вход СЭР, которая производит управление движительно-рулевым комплексом аппарата с целью поиска и поддержания курса, соответствующего максимальному значению ν; при регистрации сигнала S уменьшают скорость движения аппарата ν; при получении отрицательной оценки ν на выходе селектора максимума (прохождении аппаратом точки расположения маяка) производят остановку подводного аппарата.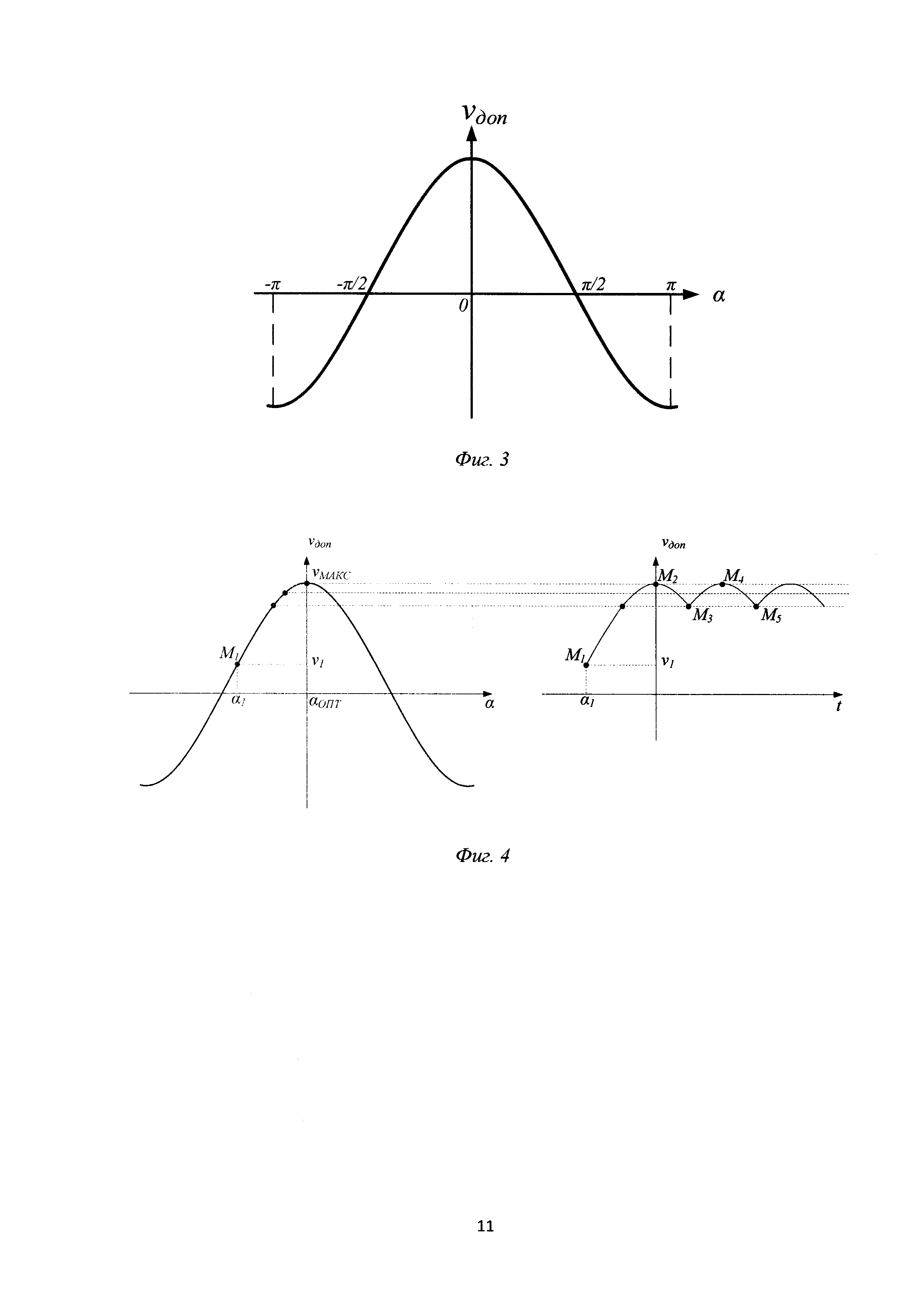




Способ обработки гидроакустических шумоподобных фазоманипулированных сигналов
Способ навигации подводного робота с использованием одномаяковой системы
Способ обработки гидроакустических шумоподобных фазоманипулированных сигналов
Способ навигации подводного робота с использованием одномаяковой системы
Способ разрешения тональных гидроакустических сигналов
Автоматизированная система управления рисками
Способ производства высокопрочного оцинкованного проката
Способ производства высокопрочного оцинкованного проката

