Результат интеллектуальной деятельности: Способ построения инерциальных демпфированных систем с произвольным периодом, инвариантных по отношению к маневрированию, и устройство для его осуществления
Вид РИД
Изобретение
Изобретение относится к навигационному приборостроению, а именно к инерциальным системам, и предназначено для повышения автономности их работы.
Известна теорема [1] "Для построения демпфированной инерциальной системы с произвольным периодом, инвариантной по отношению к маневрированию объекта, необходимо вводить в нее внешнюю информацию о скорости и координатах объекта и на основе сравнения этой информации с соответствующей информацией, даваемой инерциальной системой, определять углы и угловые скорости вертикали". Известны инерциальные системы (ИНС) [2], в которых для одновременного обеспечения устойчивости (демпфирования) и невозмущаемости кроме сигналов гироскопов - датчиков угловой скорости (ДУС) и акселерометров (АКС) вводится внешняя информация о линейной скорости объекта. Это может быть сигнал от допплеровского измерителя скорости или от лага [3], но чаще всего используют информацию спутниковых навигационных систем (СНС) [4, 5]. При потере сигнала спутника на время его отсутствия систему переводят из устойчивого состояния в состояние - на границе устойчивости [6] или сохраняют неизменными виртуальные эфемериды спутника [7]. Недостатками таких режимов являются переходные процессы в момент переключения и ограничение времени работы из-за появления накапливающихся ошибок.
Известны схемы [1, 2, 3, 4, 5, 6, 7], в которых применены перечисленные способы обеспечения невозмущаемости. В качестве прототипа рассмотрим схему [5, с. 184], реализующую алгоритм инерциальной системы с внешней информацией от СНС. Ее недостатком является потеря автономности объектом при связи со спутником.
Задачей изобретения является разработка способа обеспечения невозмущаемости ИНС без привлечения внешней информации о линейной скорости объекта.
Поставленная задача решается путем введения внешней информации об углах наклона объекта относительно вертикали, причем углы вырабатывают двойным интегрированием угловых ускорений с однократной или периодической коррекцией текущих значений по сигналам датчика эталонного угла.
Инерциальная система, реализующая предложенный способ, содержит датчик угловой скорости, акселерометр, источник внешней информации и замкнутый контур из первого интегратора, второго интегратора и регулируемого звена. Контур имеет четыре входа и два выхода, первые вход и выход совпадают с входом и выходом первого интегратора, вторые вход и выход совпадают с входом и выходом второго интегратора, третий вход совпадает с входом регулируемого звена, четвертый вход расположен между выходом регулируемого звена и первым входом. Источник внешней информации через масштабирующие устройства соединен с третьим и четвертым входами. В отличие от прототипа в предлагаемой системе акселерометр соединен с первым входом, датчик угловой скорости через масштабирующее устройство - вторым входом, а в качестве источника внешней информации введен датчик угла наклона относительно вертикали. Осуществляется перемена мест подключения датчика угловой скорости и акселерометра к замкнутому контуру ИНС, туда, где ДУС обычно стоял, включают АКС, а на место АКСа ставят ДУС, и используется другой источник внешней информации.
Датчик угла наклона состоит из датчика эталонного угла, измерителя текущих углов, суммирующего устройства, устройства сравнения, вычислителя начальных условий и выключателя. Выходом датчика угла наклона является суммирующее устройство, один вход которого соединен с выходом измерителя текущих углов, состоящего из углового акселерометра и соединенных с ним последовательно двух интеграторов. Второй вход суммирующего устройства через выключатель соединен с выходом вычислителя начальных условий, вход которого соединен с выходом устройства сравнения. Входы устройства сравнения подключены к выходам измерителя текущих углов и датчика эталонного угла. Начальные условия формируются с помощью датчика эталонного угла. Это может быть любой измеритель наклонов: уровень, маятник, гировертикаль или гравиметр.
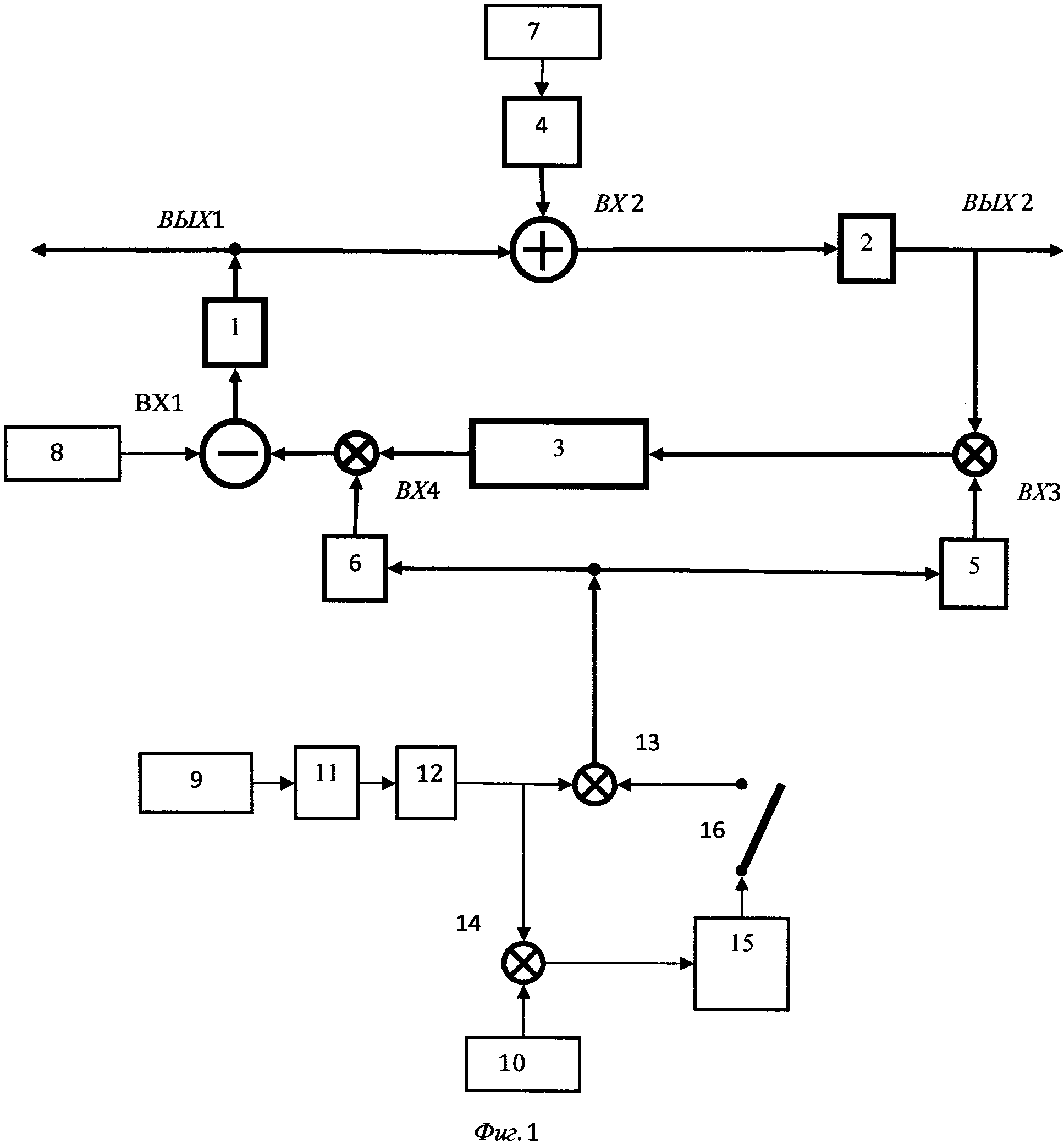
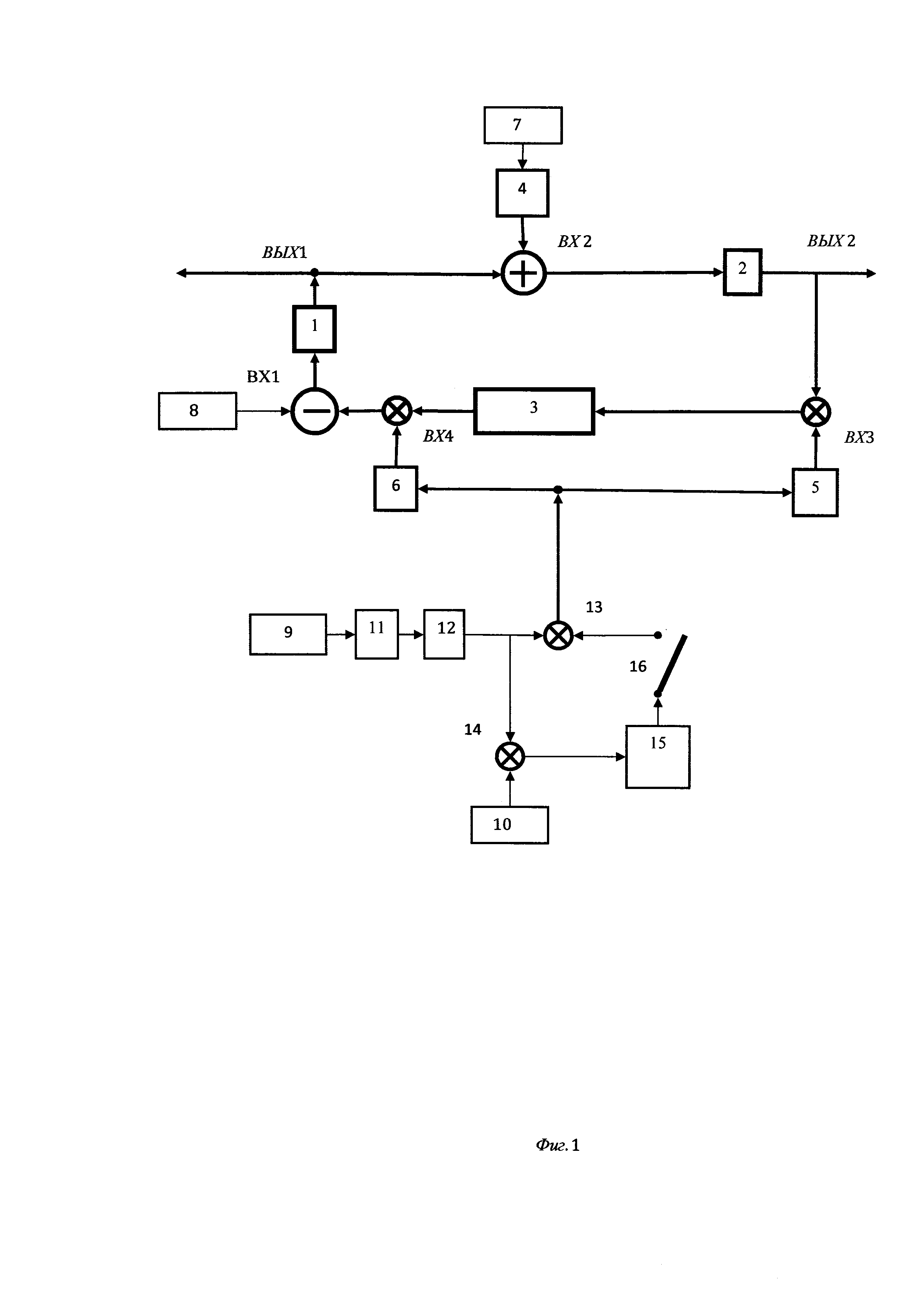
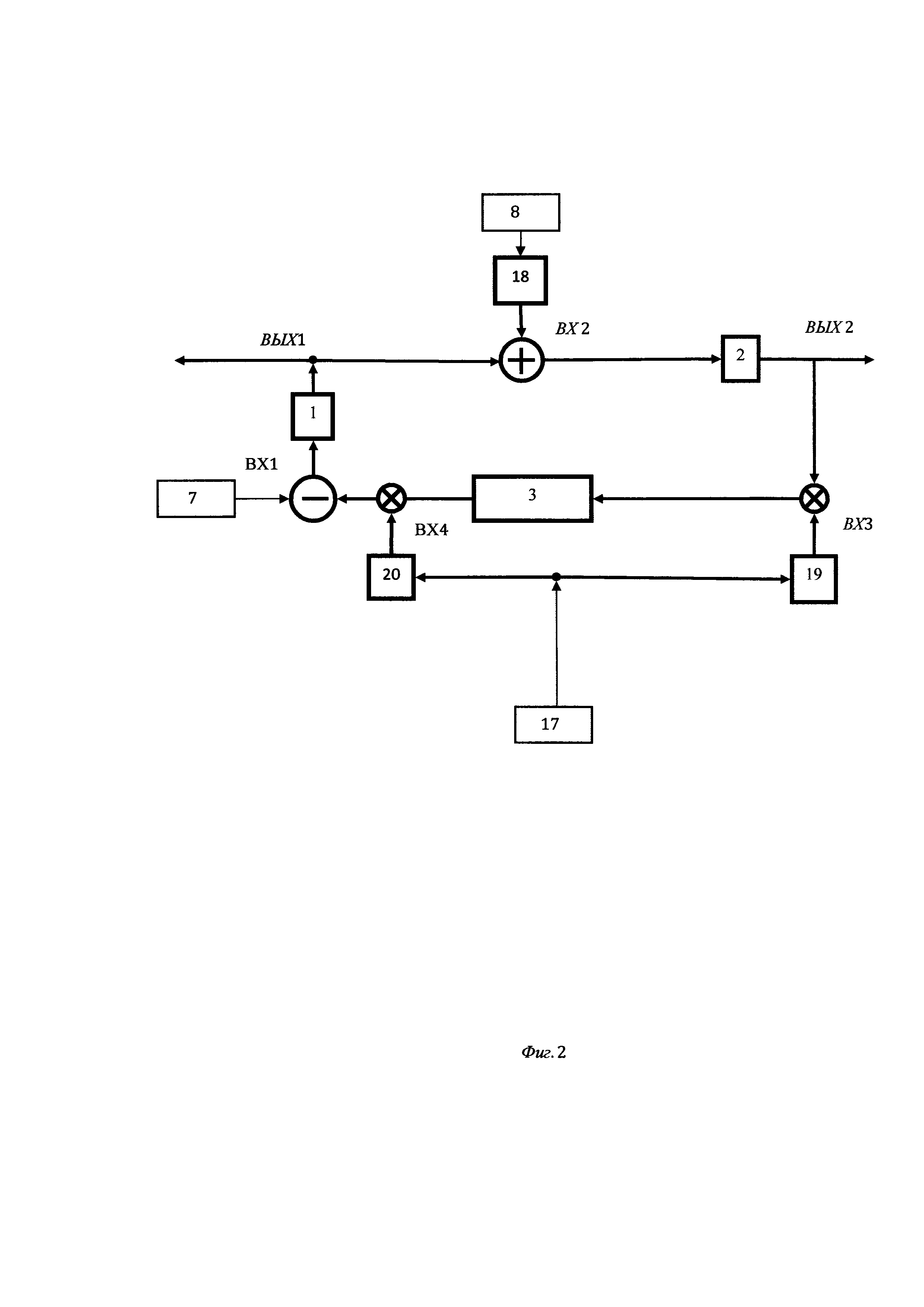
Сущность изобретения поясняется фиг. 1 и фиг. 2. На фиг. 1 отражен принцип реализации способа обеспечения невозмущаемости в соответствии с изобретением. На фиг. 2 приведена схема, полученная путем эквивалентных преобразований принятой за прототип схемы ИНС. На фиг. 1 и фиг. 2 приняты следующие обозначения:
1, 2 - интеграторы с передаточной функцией  : 1 - первый интегратор замкнутого контура ИНС, 2 - второй интегратор замкнутого контура ИНС,
: 1 - первый интегратор замкнутого контура ИНС, 2 - второй интегратор замкнутого контура ИНС,
3 - регулируемое звено с передаточной функцией  ,
,
4, 5, 6 - масштабирующие устройства,
7, 8, 9, 10 - датчики: 7 - датчик угловой скорости (ДУС), 8 - линейный акселерометр (АКС), 9 - угловой акселерометр (УАК),
10 - датчик эталонного угла,
11, 12 - интеграторы сигналов углового акселерометра,
13 - суммирующее устройство,
14 - устройство сравнения,
15 - вычислитель начальных условий,
16 - выключатель,
ВХ1, ВХ2, ВХЗ, ВХ4 - входы контура ИНС,
ВЫХ1, ВЫХ2 - выходы контура ИНС.
На фиг. 2 также изображены:
17 - спутниковая навигационная система (СНС),
18, 19, 20 - масштабирующие устройства.
Первый интегратор 1, второй интегратор 2 и регулируемое звено 3 соединены в замкнутый контур. Контур имеет четыре входа и два выхода. Вход ВХ1 и выход ВЫХ1 расположены на входе и выходе первого интегратора 1. Вход ВХ2 и выход ВЫХ2 расположены на входе и выходе второго интегратора. Вход ВХ3 расположен на входе регулируемого звена. Вход ВХ4 расположен между выходом регулируемого звена и ВХ1. ВХ2, ВХ3 и ВХ4 соединены с масштабирующими устройствами: ВХ2 - с устройством 4, ВХ3 - с устройством 5, ВХ4 - с устройством 6. На ВХ1 поступает сигнал от линейного акселерометра 8 на фиг.1 или сигнал от ДУСа 7 на фиг. 2. На ВХ2 поступает через масштабирующее устройство 4 сигнал датчика угловой скорости 7 на фиг. 1 или через масштабирующее устройство 18 сигал от АКСа на фиг. 2. На третий и четвертый входы ВХ3 и ВХ4 поступает сигнал от источника внешней информации: через масштабирующие устройства 5 и 6 с суммирующего устройства 13 на фиг. 1 или через масштабирующие устройства 19 и 20 от СНС 17 на фиг. 2. Угловой акселерометр 9, соединенный с двумя последовательно включенными интеграторами 11 и 12, образует измеритель приращений углов. Измеритель приращений соединен с суммирующим устройством 13, второй вход которого подключен к выключателю 16, соединенному с вычислителем начальных условий 15. Вход вычислителя 15 соединен с устройством сравнения углов 14, на которое подаются сигналы с интегратора 12 и датчика эталонного угла 10. На фиг. 1 с ВЫХ1 контура снимается информация о скорости объекта, а с ВЫХ2 - непрерывная информация об углах наклона. На фиг. 2 с ВЫХ1 снимается информация об углах наклона, а с ВЫХ2 - о скорости объекта.
Рассмотрим идеальную работу замкнутого контура, состоящего из первого 1, второго 2 интеграторов и регулируемого звена 3.
Основными измерителями в инерциальных системах являются гироскопы - датчики угловой скорости (ДУС) 7 и акселерометры (АКС) 8. При идеальной работе в условиях движения по поверхности Земли они вырабатывают сигналы, которые можно записать в операторном виде

Где V - линейная скорость по поверхности Земли, α - угол качки.
Проведя замену переменных  и масштабирование
и масштабирование  , получим сигналы
, получим сигналы

где  квадрат постоянной времени М. Шулера.
квадрат постоянной времени М. Шулера.
Проведя другую замену переменных аК=gα и другое масштабирование  , получим сигналы
, получим сигналы

В системе (3) изменим порядок следования уравнений и знак при аизм, в результате получим систему (4) с точностью до обозначений Ω (аК), α (- V), совпадающую с (2), но с другим порядком расположения источников сигналов

Представим сигналы на входах контура в общем виде U1, U2, U3, U4 и запишем полные передаточные функции с четырех входов на два выхода

Рассмотрим контур на фиг. 2, построенный путем эквивалентного преобразования контура ИНС, невозмущаемой за счет введения сигнала СНС, прототипа. Для первого примера примем, что входные сигналы имеют вид U1V, U2V (2), а сигнал СНС отсутствует, то есть U3=U4=0. В этом случае, если в (5) подставить выражения (2), то получим выходные сигналы контура ИНС с короткопериодной гировертикалью, возмущаемой ускорениями pΩ.

Если принять для второго примера, что знаменатель передаточной функции регулируемого звена равен квадрату постоянной времени М. Шулера  , то получим ИНС с периодом М. Шулера, на выходе которой разделены сигналы качки и скорости
, то получим ИНС с периодом М. Шулера, на выходе которой разделены сигналы качки и скорости

Для обеспечения того же результата в короткопериодной системе без наложения ограничений на формулу и величину Н, вводят сигнал скорости от СНС

и получают сигналы, идентичные сигналам ИНС с периодом М.Шулера (7)

На схеме фиг. 2 обеспечение невозмущаемости реализуется масштабированием сигнала акселерометра на устройстве 18 с коэффициентом  , сигнала СНС 17, поступающего на ВХ3 через устройство 19 с коэффициентом , а - на ВХ4 через устройство 20 с коэффициентом
, сигнала СНС 17, поступающего на ВХ3 через устройство 19 с коэффициентом , а - на ВХ4 через устройство 20 с коэффициентом  .
.
На фиг. 1 примем, что входные сигналы контура по ВХ1 и ВХ2 имеют вид (4), то есть ДУС и АКС поменяем местами по сравнению с фиг. 2

С суммирующего устройства 13 поступает сигнал а, а после масштабирования на ВХ3 и ВХ4 поданы сигналы

Подставив эти входные сигналы в (5), получим выходные сигналы короткопериодной невозмущаемой ИНС в виде

Для реализации такой системы масштабирующие устройства 4 и 5 должны иметь коэффициент R, а масштабирующее устройство 6 - коэффициент g.
В качестве независимого датчика угла качки α для получения сигналов (10) используют угловой акселерометр (УАК) 9 с двумя интеграторами 11 и 12, включенными последовательно с ним. Такая схема выработки угла требует знания постоянных интегрирования - начальных условий. Начальные условия вычисляют в блоке 15 при запуске системы. Во время работы периодически, в зависимости от требуемой точности определения координат и качества акселерометра, начальные условия корректируются с интервалом от нескольких часов до нескольких месяцев. Для выработки начальных условий необходимо сигнал с интегратора 12 сравнить с эталонным сигналом датчика 10. В качестве периодически действующего источника эталонного сигнала можно использовать любое угломерное устройство, показания которого в данный момент наиболее достоверны. Это могут быть как простой кренометр или гировертикаль [5, 6], так и абсолютный [8] или относительный гравиметры [9]. Если на объекте нет гравиметра, то начальные условия вводят от не имеющей внешней информации короткопериодной гировертикали при прямолинейном и равномерном движении объекта или от короткопериодной гировертикали, связанной с СНС. При изменении вектора скорости или затенении спутника такие вертикали возмущаются (6), но рассматриваемая ИНС останется инвариантной к маневрированию объекта, то есть другим способом решается задача, рассмотренная в патентах [6,7]. Для объектов с ограниченным временем действия, связь которых с СНС во время работы невозможна или нежелательна, начальные углы наклона вводят один раз перед стартом от командного прибора.
Технический эффект заключается в том, что предложенная инерциальная система не связана с акустическим или электромагнитным излучением, и при ее работе автономность объекта не нарушается.
Источники информации
1. Боднер В.А., Селезнев В.П., Овчаров В.П. К теории инерциальных демпфированных систем с произвольным периодом, инвариантных по отношению к маневрированию объекта. «Изв. АН СССР», ОТН, Энергетика и автоматика, №3, 1959.
2. Ривкин С.С. Теория гироскопических устройств. Ч II. Л.: Судостроение. 1964. С. 468.
3. Андреев В.Д. Теория инерциальной навигации. М.: Наука. 1967.
4. Игнатьев С.В. Гирогоризонткомпас на волоконно-оптических гироскопах с вращением блока чувствительных элементов. // Гироскопия и навигация. - 2001. №3.
5. Дзюба А.Н., Старосельцев Л.П. Концепция построения системы гироскопической стабилизации зенитного телескопа с аналитической коррекцией астрономических наблюдений на основе волоконно-оптических гироскопов. // Материалы 7-й Российской мультиконференции по проблемам управления. - СПб: ГНЦ РФ ОАО «Концерн «ЦНИИ Электроприбор», 2014. - С. 184.
6. Патент RU 2 436 046 2010 08 09. Гирогоризонткомпас с вращением инерциального измерительного блока.
7. Патент RU 2 319 930 2006 03 14. Корректируемая система инерциальной навигации и стабилизации.
8. Патент RU 2 545 311 2013 12 10. Устройство для определения вертикали места.
9. Патент RU 2 343 418 2009 01 10. Устройство для определения углового положения подвижного объекта относительно вектора силы тяжести и способ его использования.
Способ выставки в вертикаль лазерного луча баллистического гравиметра и гравиметр для его осуществления
Способ измерения на подвижном основании абсолютного значения ускорения свободного падения и гравиметры для его осуществления
Способ измерения ускорения свободного падения на подвижном объекте
Устройство для определения вертикали места
Автономный гравитационный градиентометр
Гравитационный градиентометр с повышенной частотой собственных колебаний
Гирогоризонткомпас
Интерферометр абсолютного гравиметра
Способ измерения на движущемся объекте абсолютного значения силы тяжести и гравиметры для его осуществления
Система определения уклонений отвесной линии
Способ выставки в вертикаль лазерного луча баллистического гравиметра и гравиметр для его осуществления
Способ измерения на подвижном основании абсолютного значения ускорения свободного падения и гравиметры для его осуществления
Способ измерения ускорения свободного падения на подвижном объекте
Устройство для определения вертикали места
Автономный гравитационный градиентометр
Гравитационный градиентометр с повышенной частотой собственных колебаний
Гирогоризонткомпас
Интерферометр абсолютного гравиметра
Способ измерения на движущемся объекте абсолютного значения силы тяжести и гравиметры для его осуществления
Астронавигационная система

