Результат интеллектуальной деятельности: АВТОНОМНЫЙ ГРАВИТАЦИОННЫЙ ГРАДИЕНТОМЕТР
Вид РИД
Изобретение
Изобретение относится к геофизическому приборостроению, а именно к гравитационным градиентометрам, и предназначено для повышения их точности и эксплуатационных характеристик.
Известны статические градиентометры [1, 2], у которых в маломоментный подвес установлен диполь (коромысло, гантель). Гравитационным силам, стремящимся его повернуть, противодействуют силы закручивания нити или электрические силы следящих систем, поддерживающих неизменным положение диполя относительно корпуса. Недостатком статических градиентометров является необходимость при проведении одного измерения градиента устанавливать диполь в несколько положений, отличающихся азимутами. Это приводит к значительной длительности измерений.
Этого недостатка лишены динамические градиентометры с квадруполем [3] или акселерометрами [4], установленными на вращающуюся платформу. Такие градиентометры непрерывно сканируют плоскость измерений, выдавая четыре значения величины градиента за оборот. Их недостатком являются ограниченные возможности определения направления изолиний гравитационного поля.
Для стабилизации объектов в горизонте используют каналы гировертикали инерциальных систем [5]. Но в инерциальных системах низка точность определения азимутальных направлений. Этого недостатка лишен гирогоризонткомпас [6], в котором для разделения полезного сигнала и помехи используют автокомпенсационное вращение вокруг вертикальной оси.
Задачей изобретения является создание градиентометра, определяющего направление линии уровня гравитационного поля на подвижном объекте.
Задача решается при использовании вращения платформы градиентометра для автокомпенсации погрешностей гироазимута. С этой целью на стабилизированной в горизонте и поворачивающейся в азимуте платформе размещают квадруполь и гироблок. Градиентометр содержит вычислитель с блоком обработки сигнала квадруполя и контуром гировертикали. В вычислитель устанавливают второй контур, в котором используют новый выход и новый вход для обеспечения точного измерения горизонтальных составляющих скорости вращения Земли, а для обеспечения вычисления азимута устанавливают блок азимута. В вычислитель также, помимо блока обработки сигналов квадруполя, введены: ячейка индикации перехода сигнала через ноль, блок дифференцирования и индикации знака производной, ячейка «И» с двумя входами и выключатель. Выход контура измерения горизонтальных составляющих скорости вращения Земли соединен с входом блока вычисления азимута, выход которого подключен к одному из контактов выключателя. Второй контакт выключателя соединен с выходом вычислителя. С выходом блока обработки информации квадруполя соединены входы ячейки индикации перехода сигнала через ноль и блока дифференцирования и индикации знака производной, а их выходы соединены с входами ячейки «И», связанной линией управления с выключателем.
Перечень чертежей
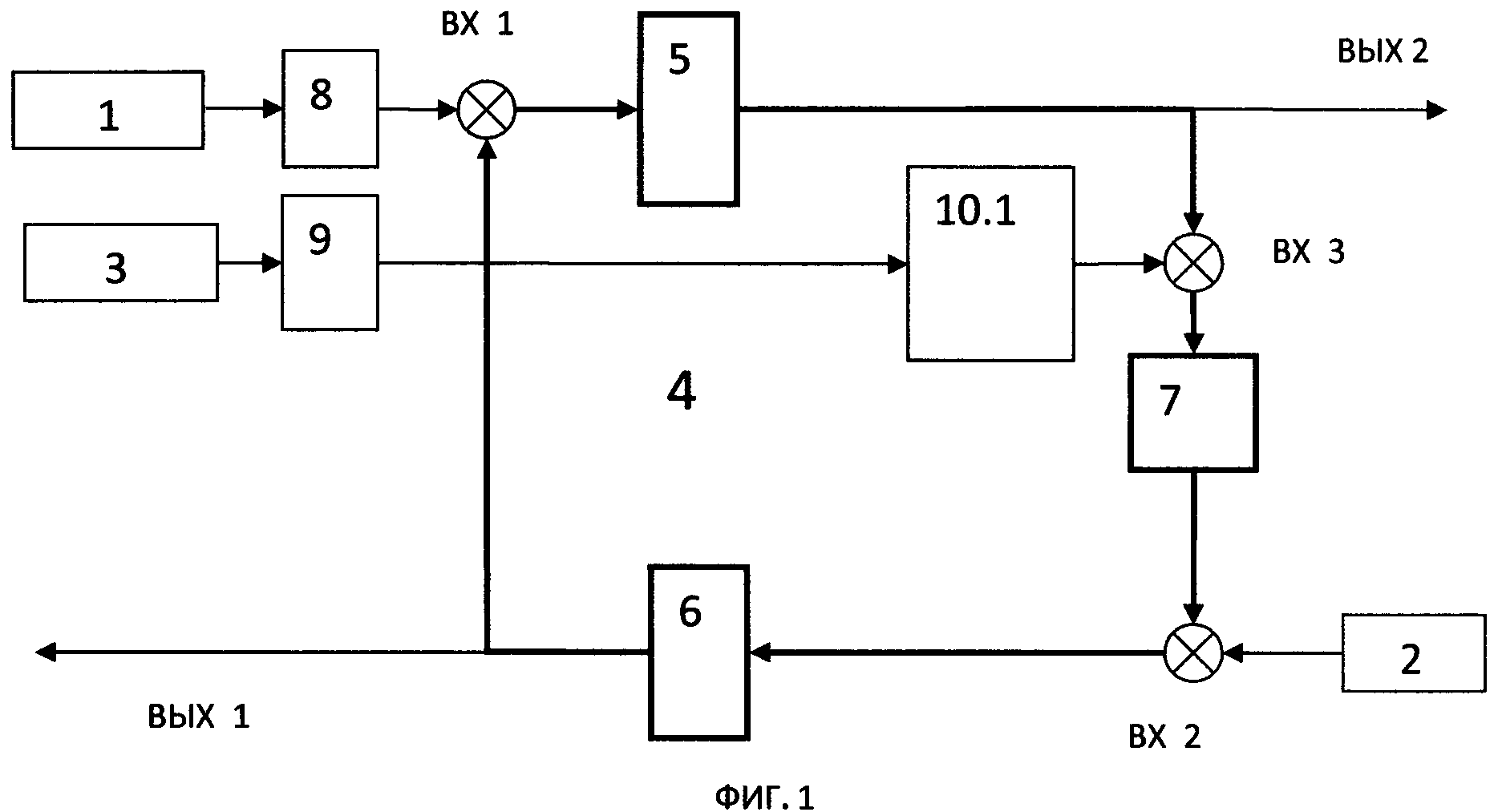
На фиг. 1, 2 изображена одноосная схема инерциальной системы [5] или гирогоризонткомпаса [6] с разными способами подключения датчика линейной скорости.
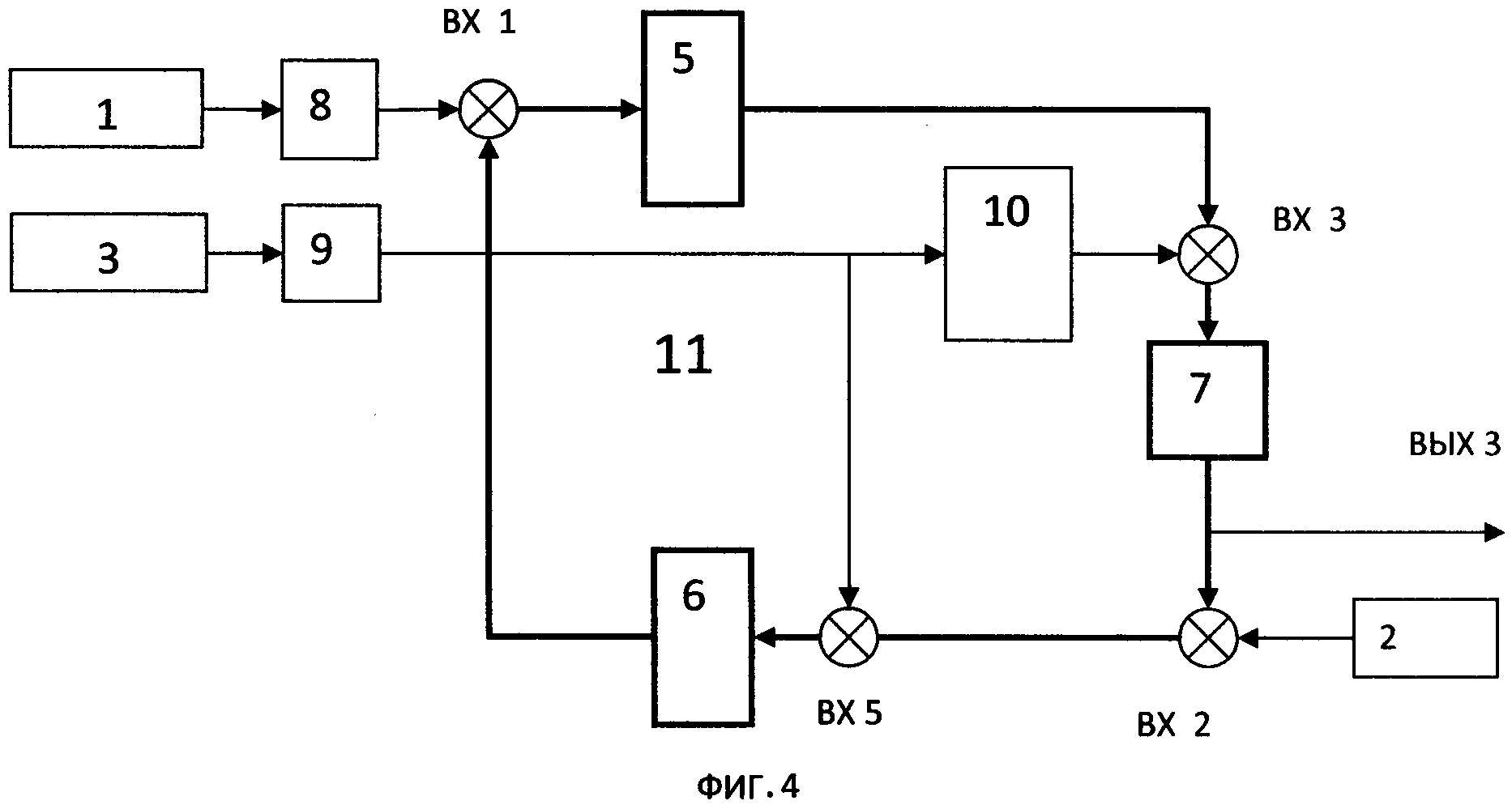
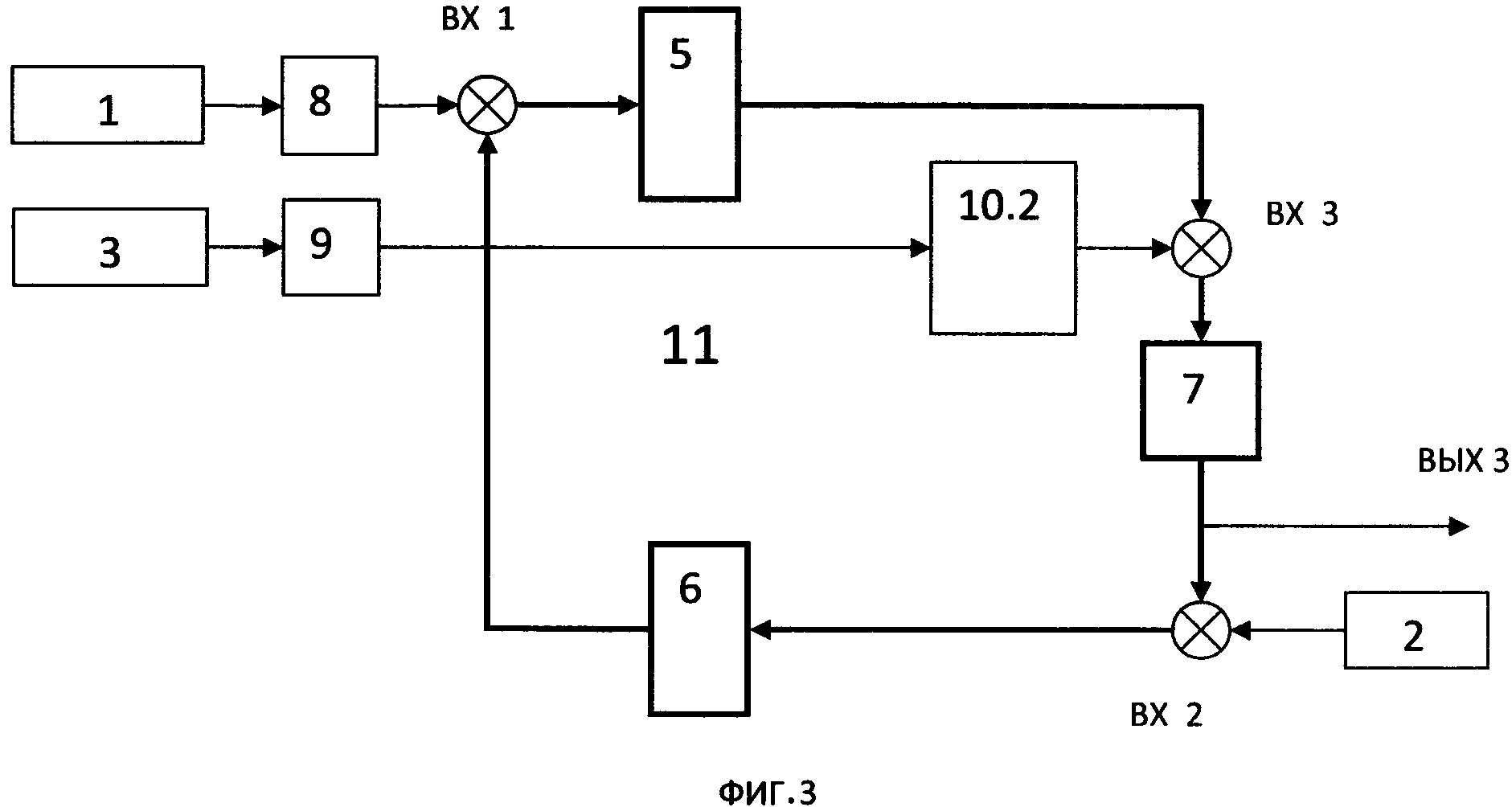
На фиг. 3, 4 изображена схема канала измерения горизонтальных составляющих скорости вращения Земли с разными способами подключения датчика линейной скорости.
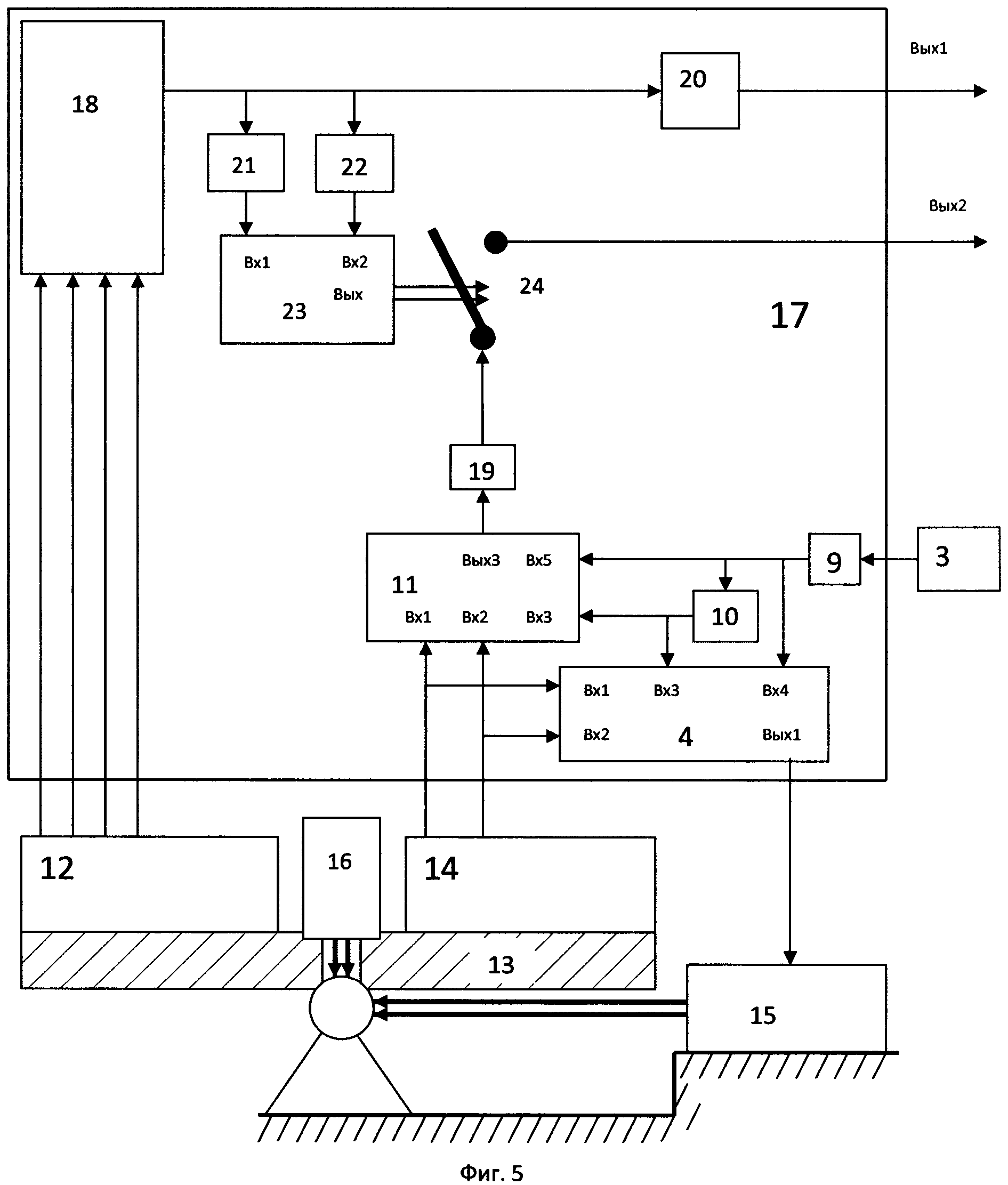
На фиг. 5 изображена общая схема градиентометра.
На фиг. 1-4 введены следующие обозначения:
1, 2, 3 - источники информации: акселерометр (АКС), датчик угловой скорости (ДУС), датчик линейной скорости - лаг или спутниковая навигационная система (СНС), соответственно;
4 - контур инерциальной системы;
5, 6 - первый и второй интеграторы с передаточной функцией 
7 - неинтегральный фильтр с передаточной функцией 
8, 9 - масштабирующие устройства  и
и  , соответственно, где
, соответственно, где  ,
, 
10 - масштабирующее устройство 
10.1 - фильтр сигнала СНС с передаточной функцией 
10.2 - фильтр сигнала СНС с передаточной функцией 
11 - контур измерения горизонтальных составляющих скорости вращения Земли (контур скорости вращения Земли);
B×1, В×2 - входы по ускорению и угловой скорости, соответственно;
В×3, В×4, В×5 - входы по линейной скорости;
Вых 1 - выход по углу качки;
Вых 2 - выход по линейной скорости или угловой скорости вращения Земли;
Вых 3 - выход по угловой скорости вращения Земли.
На фиг. 5 ведены следующие обозначения:
12 - квадруполь;
13 - стабилизированная в горизонте и вращающаяся в азимуте платформа;
14 - гироблок;
15 - привод стабилизации по углам качки;
16 - привод вращения в азимуте;
17 - вычислитель;
18 - блок обработки сигналов квадруполя;
19 - блок вычисления азимута;
20 - блок вычисления величины гравитационного градиента;
21 - ячейка индикации перехода сигнала через ноль;
22 - блок дифференцирования и индикации знака производной;
23 - ячейка «И»;
24 - выключатель.
Инерциальная система (ИНС) [5] или гирогоризонткомпас (ГГК) [6] имеют одинаковую схему, представленную на фиг. 1, 2, и отличаются только видом используемой выходной информации. В ИНС в качестве полезной информации используют углы качки и линейную скорость, а в ГГК вырабатывают углы качки и горизонтальные составляющие угловой скорости вращения Земли. Линейная скорость или составляющие угловой скорости снимаются с одного выхода - Вых 2, а потом разделяются на устройствах, не показанных на фиг. 1, 2.
ИНС, ГГК и канал измерения горизонтальных составляющих скорости вращения Земли (канал СВЗ) работают при наличии трех источников информации: об ускорении - от акселерометров 1, об угловой скорости - от датчиков угловой скорости 2 и о линейной скорости - от лага или спутниковой навигационной системы 3. Основой ИНС является замкнутый контур 4, содержащий последовательно соединенные звенья: первый интегратор 5, неинтегральный фильтр 7 и второй интегратор 6. Контур имеет три входа: B×1 - на входе первого интегратора 5, В×2 - на входе второго интегратора 6 и В×3 - на входе неинтегрального фильтра 7. При реализации ИНС сигнал СНС расщепляют и для одной его части используют В×4 - на выходе неинтегрального фильтра 7. Контур имеет два выхода: Вых 1 - на выходе второго интегратора 6 по углам качки и Вых 2 - на выходе первого интегратора 5 по линейной скорости или угловой скорости вращения Земли. АКС 1 через масштабирующее устройство 8 соединен с B×1 контура 4. ДУС 2 соединен с В×2 контура 4. СНС 3 через масштабирующее устройство 9 и фильтр 10.1 соединен с В×3 контура 4. В случае расщепления сигнала СНС одна его часть остается на В×3, поступая через масштабник 10, а вторая подается на В×4.
На фиг. 3, 4 контур измерения горизонтальных составляющих скорости вращения Земли 11 отличается от контура 4 новым выходом - Вых 3, расположенном на выходе неинтегрального фильтра. В связи с введением новой передаточной функцией фильтра 10.2 на фиг. 3 при расщеплении сигнала СНС появляется новый В×5, как показано на фиг. 4.
На фиг. 5 квадруполь 12 расположен на стабилизированной в горизонте и вращающейся в азимуте платформе 13, на которую установлен гироблок 14 с АКСами и ДУСами. Стабилизация в горизонте осуществляется приводом 15, соединенным с Вых 1 контура 4. Вращение в азимуте осуществляется приводом 16. Сигналы с гироблока и квадруполя поступают в вычислитель 17 на блок обработки сигналов квадруполя 18 и на контуры 4 и 11. Вых 3 контура 11 соединен с вычислителем азимута 19, выход которого, в свою очередь, соединен с выключателем 24. второй контакт выключателя 24 соединен с Вых 2 вычислителя. Выход блока обработки 18 через блок вычисления градиента 20 соединен с Вых 1 вычислителя 17. Входы ячейки индикации перехода сигнала через ноль 21 и блока дифференцирования и индикации знака производной 22 соединены с выходом блока обработки 18, а их выходы со входами ячейки «И», выход которой управляет состоянием выключателя 24.
Рассмотрим работу одноосной схемы ИНС или ГГК на фиг. 1, 2. Примем, что источники информации измеряют следующие сигналы:

где р - оператор дифференцирования, V - линейная скорость, Ω - угловая скорость, α - угол качки, ω3г - горизонтальные составляющие скорости вращения Земли, апу - переносные ускорения качки.
После масштабирования  и преобразования на фильтре 10.1 на входы основного контура 4 поступают сигналы:
и преобразования на фильтре 10.1 на входы основного контура 4 поступают сигналы:

Выходные сигналы контура имеют вид:


Введем инструментальные погрешности источников информации: акселерометров -  датчиков угловых скоростей - Δдус, спутниковой навигационной системы -
датчиков угловых скоростей - Δдус, спутниковой навигационной системы -  и с учетом
и с учетом  получим
получим

Сигнал W1 используют для стабилизации в горизонте платформы. В сигнале W2 выделяют в случае ИНС линейную скорость  или в случае ГГК угловую скорость
или в случае ГГК угловую скорость  .
.
Во втором варианте можно избавиться от помехи в виде линейной скорости, вычтя ее из сигнала с учетом погрешности СНС

Для того чтобы оценить недостатки такого способа выделения сигнала ω3г, приведем таблицу передаточных функций при самом простом выражении  (Таблица 1). T0, Т1, Tk - постоянные времени. В таблице показаны передаточные функции для крайних диапазонов частот ω→∞ и ω→0.
(Таблица 1). T0, Т1, Tk - постоянные времени. В таблице показаны передаточные функции для крайних диапазонов частот ω→∞ и ω→0.
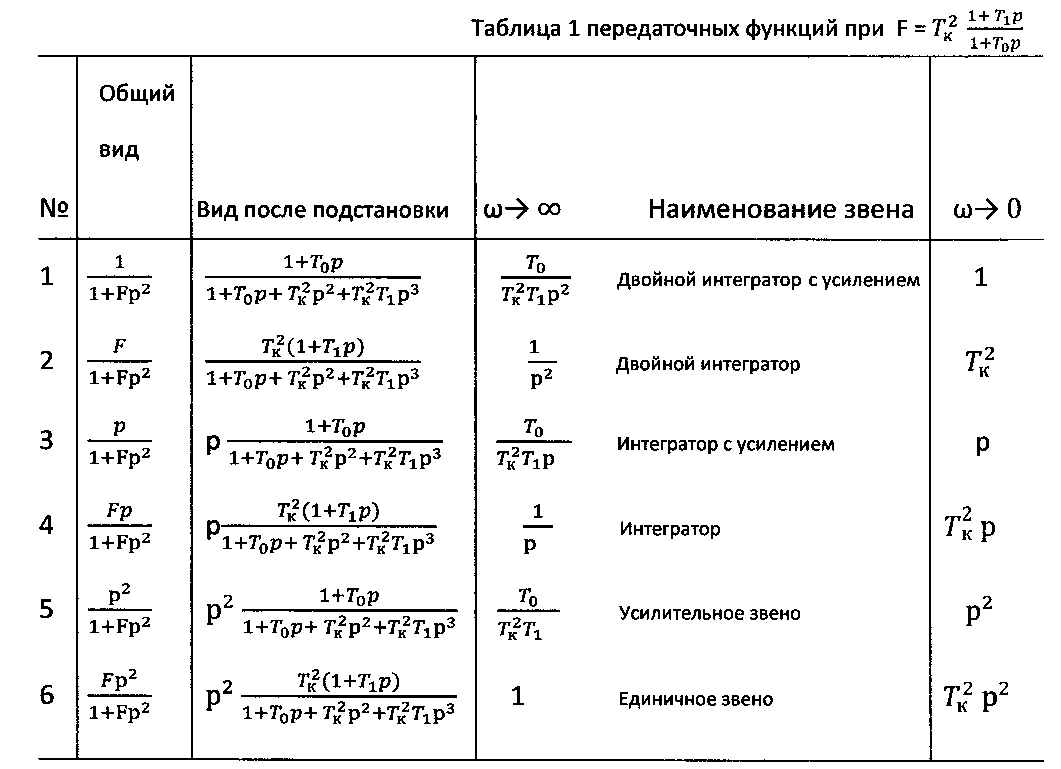

Условно отнесем качку α и колебания динамической вертикали αпу к высокочастотному диапазону ω→∞, а остальные сигналы - к низкочастотному ω→0. В этом приближении разность сигналов второго выхода и линейной скорости приобретает вид

Недостатком выделения ω3г из этого выражения является зависимость от квадрата постоянной времени  и большая помеха от переносных ускорений качки
и большая помеха от переносных ускорений качки  Колебания динамической вертикали слабо сглаживаются в зоне ЛАХ с наклоном 20 дБ/дек.
Колебания динамической вертикали слабо сглаживаются в зоне ЛАХ с наклоном 20 дБ/дек.
На фиг. 3 показана схема для вычисления горизонтальных составляющих скорости вращения Земли, в которой по сравнению со схемой на фиг. 1 исключен Вых 2, установлен Вых 3 и принята передаточная функция фильтра 10.2  . Сигнал на Вых 3 запишется в виде
. Сигнал на Вых 3 запишется в виде

Обращаясь к таблице, запишем первое приближение:

Это выражение в переменной ω3г инвариантно к  выбором малого коэффициента
выбором малого коэффициента  можно уменьшить влияние помехи от переносного ускорения.
можно уменьшить влияние помехи от переносного ускорения.
Если взять неинтегральный фильтр высокого порядка  то в соответствии с таблицей 2 приближение приобретет вид
то в соответствии с таблицей 2 приближение приобретет вид

Наклон ЛАХ на частотах качки можно сделать как угодно большим, а влияние переносных ускорений как угодно малым. Следовательно, вводя Вых 3, получают независимость вычисленного значения ω3г от параметров контура и от колебаний динамической вертикали, что значительно повышает точность измерений.
С помощью автокомпенсации разделяют сумму (ω3г+Δдус), так как составляющие скорости вращения Земли в приборной системе координат ωзгу - и ωзгу зависят от азимута, а Δдус от него не зависит. В блоке 19 выделяют приборные проекции угловой скорости вращения Земли:
и вычисляют азимут 
Сигнал квадруполя представляет собой синусоиду на двойной частоте вращения платформы. Так как квадруполь симметричен относительно центра и его сигнал не имеет определенного знака, то нужно, прежде всего, внести асимметрию, приняв один из концов диполей за базовый. Когда базовые концы гантелей находятся с одной стороны от изолинии, они стремяться сблизиться, а когда по разные стороны - то отдалиться. Значения сигналов квадруполя при сближении концов будем считать положительными, со знаком «+», значения сигналов при расхождении концов будем считать отрицательными, со знаком «-». Пересечение изолинии соответствует переходу от знака минус к знаку плюс, то есть положительному знаку «+» производной.
Момент перехода сигнала через ноль фиксируется ячейкой 21, а производная вычисляется и ее знак индицируется в блоке 22. Когда переход через ноль происходит при положительном знаке производной, срабатывает ячейка «И» 23 и включает выключатель 24, который подает на Вых 1 вычислителя значение азимута изолинии.
На корабле, например, если градиентометр установлен на стабилизированную в горизонте и вращающуюся в азимуте платформу, можно определить направление изолинии в приборной горизонтной системе координат, затем спроектировать ее в приборную наклонную систему. Потом последовательно перевести в корабельную наклонную и в горизонтную корабельную. Последним действием, добавив курс, вычисляем азимут в географической системе координат. В изобретении предлагается заменить четыре преобразования координат одним прямым измерением, что приведет к повышению точности градиентометра.
Литература
1. Грушинский Н.В. «Основы гравиметрии», М., Наука, 1983.
2. Патент РФ №2 172 976 200108 27. «Гравитационный вариометр».
3. Патент US №2012 222 481 2012 09 16. «Квадрупольный ответчик для гравитационных градиентометров OQR».
4. Патент US №2002 0440 621 2009 02 19. «Акселерометр и пакет программ оценки чувствительности для гравитационного градиентометра».
5. Ривкин С.С., Берман З.И., Окон И.М. «Определение параметров ориентации объекта бесплатформенной инерциальной системой», С-Пб, ЦНИИ «Электроприбор», 1996.
6. Игнатьев С.В. «Гирогоризонткомпас на волоконно-оптических гироскопах с вращением блока чувствительных элементов». - «Гироскопия и навигация», 2000, №3.
Гравитационный градиентометр, содержащий квадруполь и гироблок, установленные на стабилизированную в горизонте и вращающуюся в азимуте платформу, а также вычислитель, в котором размещены блок обработки сигналов квадруполя, блок вычисления величины градиента и состоящий из последовательно соединенных первого интегратора, неинтегрального фильтра и второго интегратора, контур гировертикали с выходом по углу качки и четырьмя входами, два из которых соединены с гироблоком, а два, подключенные к входу и выходу неинтегрального фильтра, - со спутниковой навигационной системой, отличающийся тем, что в вычислитель введен контур измерения горизонтальных составляющих скорости вращения Земли, выходом которого является выход неинтегрального фильтра, а одним из входов по линейной скорости является вход второго интегратора, в вычислитель также введены блок вычисления азимута, блок дифференцирования и индикации знака производной, ячейка индикации перехода сигнала через ноль, ячейка «И» с двумя входами и выключатель, причем выход контура измерения горизонтальных составляющих скорости вращения Земли соединен с входом вычислителя азимута, выход которого подключен к одному из контактов выключателя, второй контакт выключателя соединен с выходом вычислителя, с выходом блока обработки информации квадруполя соединены входы ячейки индикации перехода сигнала через ноль и блока дифференцирования и индикации знака производной, а их выходы соединены с входами ячейки «И», выход которой соединен с выключателем.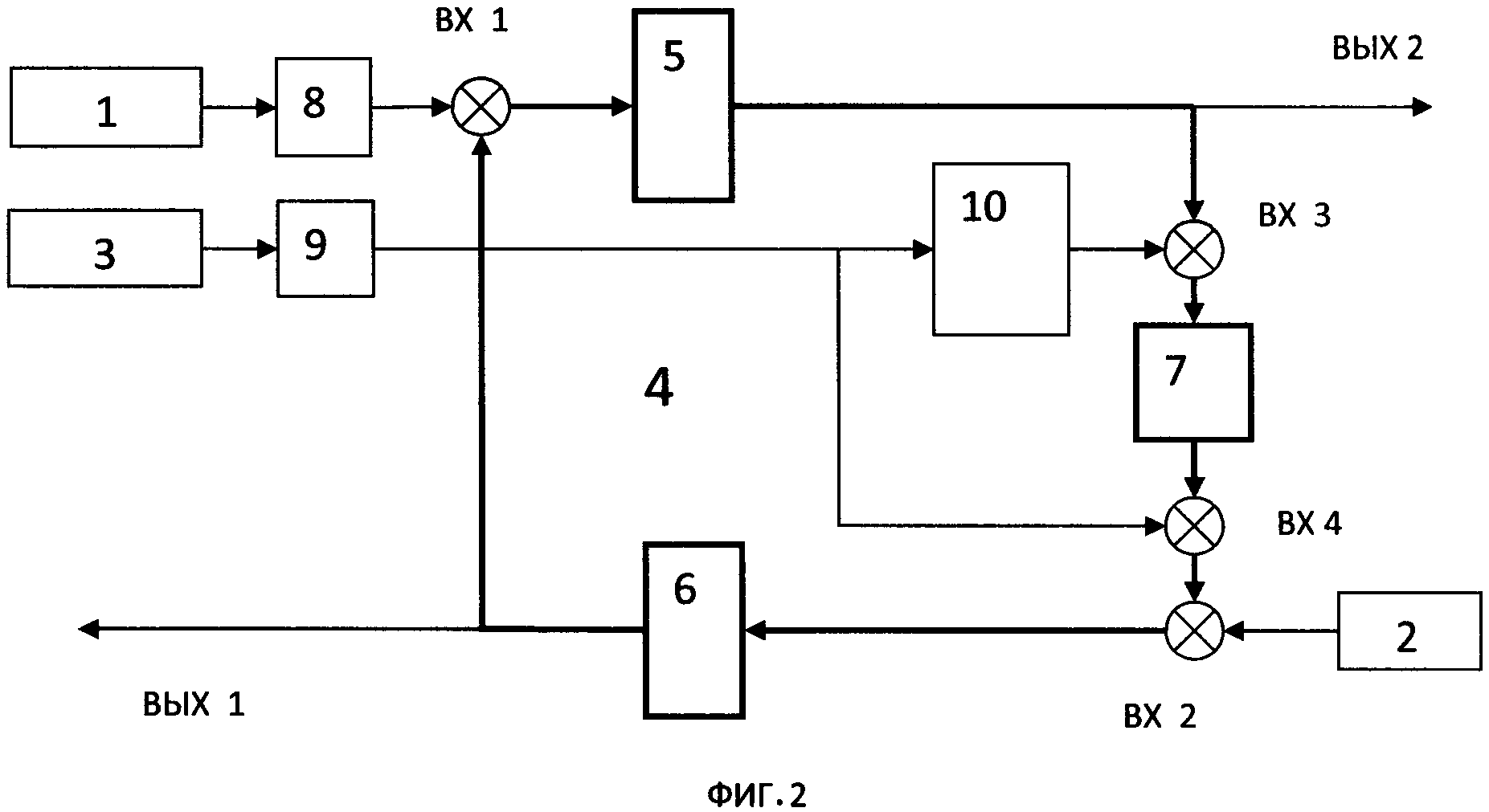
Способ выставки в вертикаль лазерного луча баллистического гравиметра и гравиметр для его осуществления
Способ измерения на подвижном основании абсолютного значения ускорения свободного падения и гравиметры для его осуществления
Способ измерения ускорения свободного падения на подвижном объекте
Устройство для определения вертикали места
Гравитационный градиентометр с повышенной частотой собственных колебаний
Гирогоризонткомпас
Способ построения инерциальных демпфированных систем с произвольным периодом, инвариантных по отношению к маневрированию, и устройство для его осуществления
Интерферометр абсолютного гравиметра
Способ измерения на движущемся объекте абсолютного значения силы тяжести и гравиметры для его осуществления
Система определения уклонений отвесной линии
Способ выставки в вертикаль лазерного луча баллистического гравиметра и гравиметр для его осуществления
Способ измерения на подвижном основании абсолютного значения ускорения свободного падения и гравиметры для его осуществления
Способ измерения ускорения свободного падения на подвижном объекте
Устройство для определения вертикали места
Гравитационный градиентометр с повышенной частотой собственных колебаний
Гирогоризонткомпас
Способ построения инерциальных демпфированных систем с произвольным периодом, инвариантных по отношению к маневрированию, и устройство для его осуществления
Интерферометр абсолютного гравиметра
Способ измерения на движущемся объекте абсолютного значения силы тяжести и гравиметры для его осуществления
Астронавигационная система

