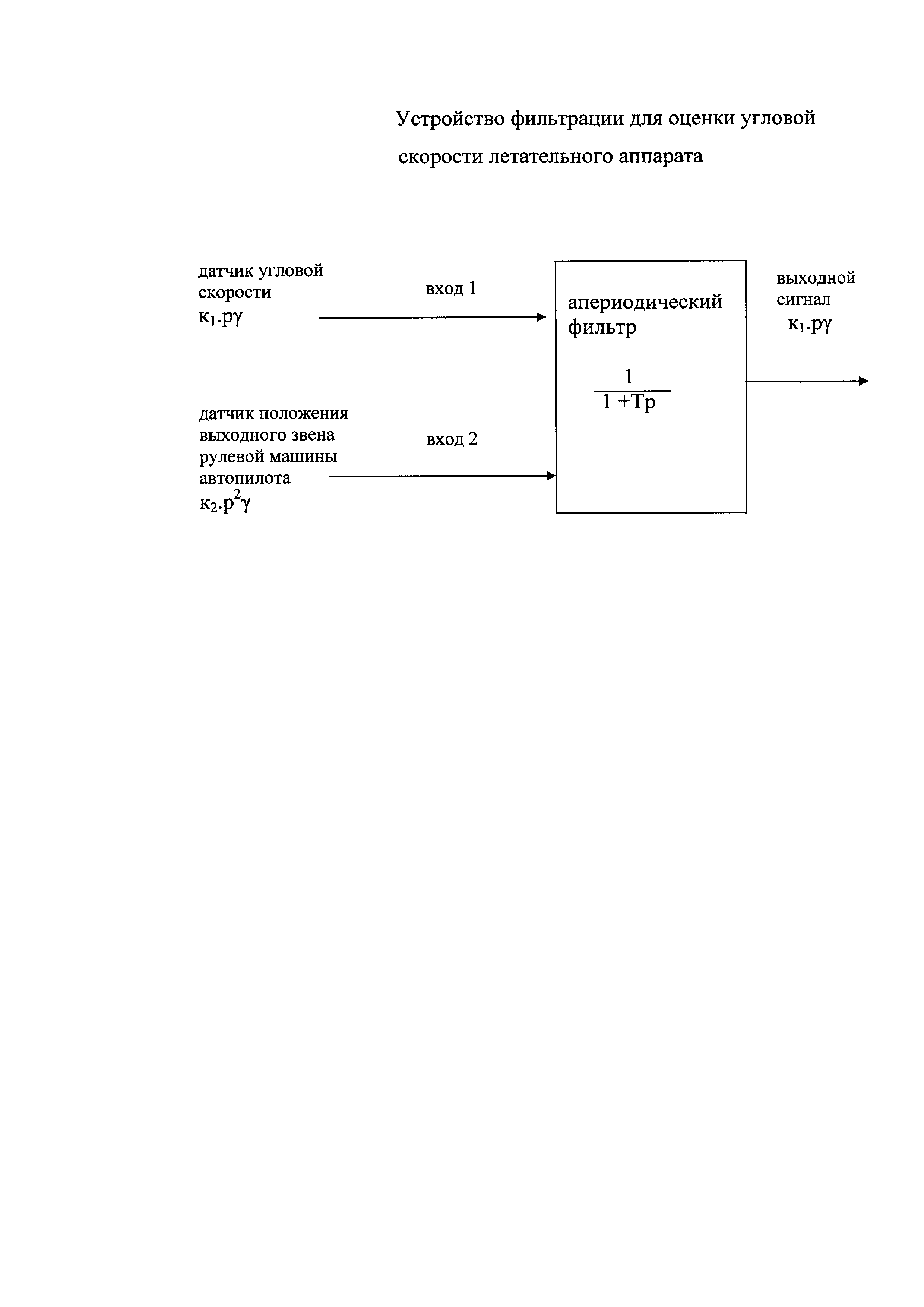
Устройство фильтрации для оценки угловой скорости летательного аппарата
Вид РИД
Изобретение
Изобретение относится к автоматике и может быть использовано при разработке систем автоматического управления летательными аппаратами (ЛА), например вертолетами.
Известны устройства классической фильтрации на основе апериодического звена первого порядка с передаточной функцией 1/(1+Тр) для устранения низкочастотного шума в сигнале угловой скорости, например, на летящем вертолете. Шум, встречающийся на вертолетах, связан в основном с вибрацией несущего винта и содержит гармоники, пропорциональные частоте вращения ротора. Частоты, равные одному циклу на оборот ротора (оборотная частота) и К циклов на оборот ротора (лопастная частота), где К - число лопастей ротора, наиболее опасны, потому что амплитуда этих вибраций высока, а частота достаточно мала, чтобы рулевые машины автопилота и плоскости управления на нее реагировали. Постоянная времени Т определяется частотным спектром шума и полосой пропускания ЛА.
Устранение низкочастотного шума устройством классической фильтрации приводит к значительному запаздыванию сигнала угловой скорости, которое ограничивает коэффициент усиления контура автоматического управления и ухудшает его динамические характеристики. Это является недостатком устройства классической фильтрации.
Указанный недостаток устранен в устройстве модифицированной комплементарной фильтрации, в котором для компенсации запаздывания устройства классической фильтрации используется метод дополнительной фильтрации, при котором классическая фильтрация, формирующая низкочастотную составляющую сигнала реального датчика угловой скорости, дополняется высокочастотной составляющей сигнала угловой скорости, вырабатываемой математической моделью вертолета (см. Отчет NASA-TM-X-74004. Применение метода модифицированной комплементарной фильтрации для увеличения полосы пропускания системы управления ЛА в условиях высокой вибрации). Таким образом, принцип дополнительной фильтрации основан на раздельном формировании низкочастотной и высокочастотной составляющих угловой скорости с последующим их суммированием.
Недостатком этого устройства является сложность компенсации запаздывания устройства классической фильтрации, требующей для своей реализации наличия дополнительных звеньев: математической модели вертолета, звена, формирующего высокочастотную составляющую угловой скорости математической модели вертолета и сумматора.
Целью изобретения является упрощение устройства.
Поставленная цель достигается тем, что устройство фильтрации для оценки угловой скорости летательного аппарата содержит апериодический фильтр первого порядка, на первый вход которого поступает сигнал с датчика угловой скорости, а на второй суммирующий вход сигнал с датчика положения выходного звена рулевой машины автопилота.
Функциональная схема предлагаемого устройства приведена на чертеже.
Устройство содержит апериодическое звено первого порядка с двумя входами и одним выходом.
Устройство работает следующим образом. На первый вход апериодического звена, имеющий передаточную функцию 1/(1+Тр), поступает сигнал с датчика угловой скорости ЛА, имеющий передаточную функцию К1⋅рγ, где рγ - угловая скорость ЛА, a К1 - крутизна сигнала датчика угловой скорости ЛА. Для компенсации запаздывания выходного сигнала апериодического звена, возникающего вследствие фильтрации низкочастотных помех, возникающих на летящем вертолете, на второй суммирующий вход апериодического звена поступает сигнал, идентичный угловому ускорению ЛА К2⋅р2γ, где р2γ - угловое ускорение ЛА, а К2 - крутизна сигнала углового ускорения ЛА. В качестве сигнала углового ускорения используется сигнал с датчика положения выходного звена рулевой машины автопилота. Подобная замена возможна, так как угловое ускорение ЛА пропорционально моменту управления, приложенному к моменту инерции ЛА, который (момент управления) пропорционален положению выходного звена рулевой машины автопилота.
Передаточная функция предлагаемого устройства фильтрации для оценки угловой скорости ЛА, приведенного на чертеже, имеет вид:
W(p)=(К1⋅рγ+К2⋅р2γ)⋅1/(1+Тр)=К1⋅рγ⋅(1+T1p)/(1+Тр), где T1=К2/К1; при T1=Т передаточная функция принимает вид W(p)=К1⋅pγ (1).
Из передаточной функции (1) видно, что выходной сигнал предлагаемого устройства содержит только сигнал угловой скорости ЛА без низкочастотной составляющей шума и без запаздывания.
Таким образом, предлагаемое устройство при более простой конструкции позволяет устранить низкочастотный шум без искажения сигнала угловой скорости ЛА.
Устройство фильтрации для оценки угловой скорости летательного аппарата, например вертолета, содержащий апериодический фильтр первого порядка, на вход которого поступает сигнал с датчика угловой скорости, отличающееся тем, что на второй суммирующий вход апериодического фильтра поступает сигнал с датчика положения рулевой машины автопилота.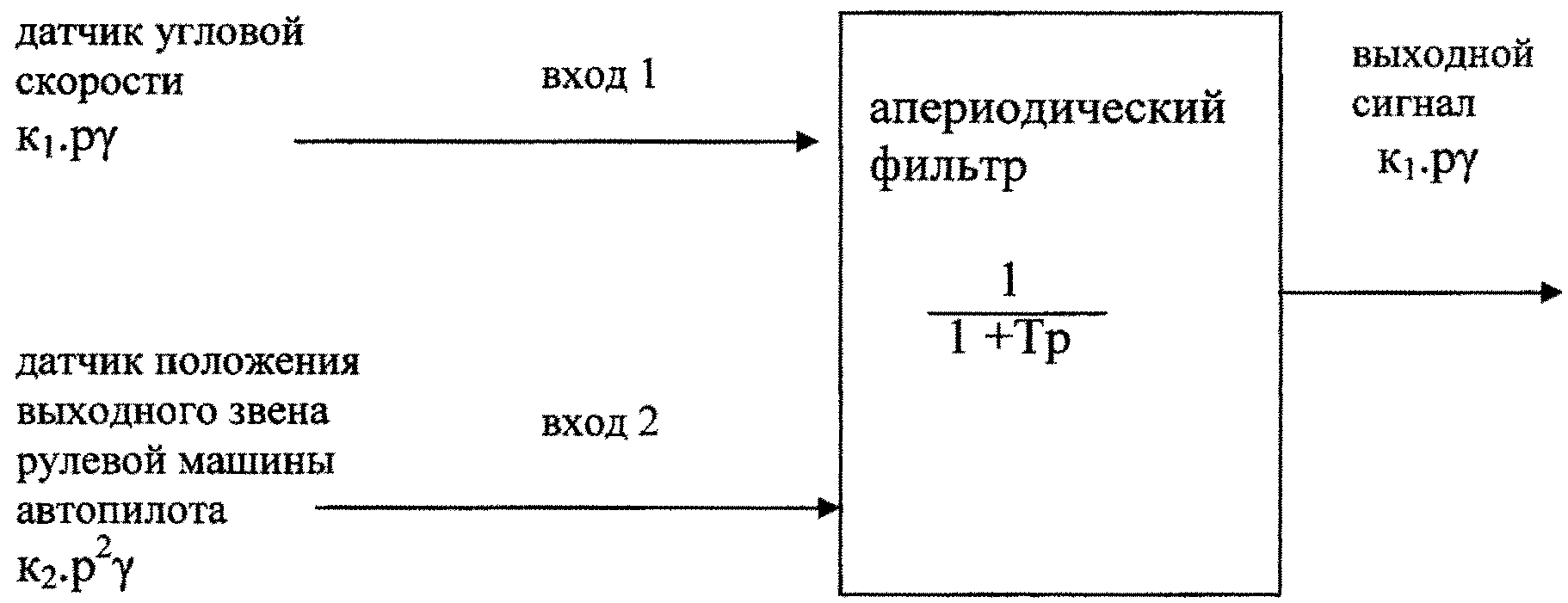
Дроссельный электрогидропривод
Дроссельный электрогидропривод
Дроссельный электрогидропривод
Устройство для определения углов крена и дифферента подвижных объектов
Способ формирования механической характеристики электропривода постоянного тока
Бесконтактный моментный привод
Дроссельный электрогидропривод
Способ формирования механической характеристики электропривода постоянного тока
Бесконтактный моментный привод
Триммерный механизм

