Бесконтактный моментный привод
Вид РИД
Изобретение
Изобретение относится к электротехнике, в частности к бесконтактным моментным приводам (БМП) на базе синхронных машин, и может быть использовано при разработке электроприводов для систем автоматического управления летательными аппаратами.
Известен электропривод на базе синхронной машины с m-фазной обмоткой на статоре и постоянными магнитами на роторе, работающий в режиме вентильного электродвигателя, то есть замкнутого обратной связью по положению ротора (см. Беленький Ю.М., Микеров А.Г. Выбор и программирование параметров бесконтактного моментного привода. Л., ЛДНТП, 1990 г., стр. 4). При этом сигнал углового положения ротора получают с отдельного датчика положения ротора (ДПР) различного типа (редуктосин серии ВТ, датчик Холла, фотоэлектрический и т.д.).
Недостатком подобного электропривода является необходимость дополнительного конструктива в виде ДПР, увеличивающего его массу и габариты.
Указанный недостаток устранен в электроприводе, в котором сигнал углового положения ротора формируется специальной электронной схемой по другим доступным измерению координатам (индуктивности фаз, ЭДС вращения электродвигателя и т.д.) (см. Товарищество «МЭЛМА», Бесконтактные моментные электродвигатели ДБМ, Справочник, Москва, 1992 г., стр. 8).
Недостатком этого привода является сложность формирования сигнала углового положения ротора электродвигателя в реальных условиях эксплуатации из-за наличия электрических помех, нелинейностей и нестационарности звеньев электропривода.
Целью изобретения является устранение указанного недостатка.
Поставленная цель достигается тем, что в БМП, содержащем датчик положения выходного звена электропривода, редуктор, синхронный m-фазный электродвигатель, фазные обмотки которого связаны с m-фазным выходом силового блока, датчик тока электродвигателя и сумматор, вычитающий вход которого соединен с выходом датчика положения выходного звена электропривода, а на суммирующий вход сумматора поступает сигнал заданного положения выходного звена электропривода, дополнительно введены узел выделения модуля входного сигнала, сумматор, математическая модель электродвигателя и математическая модель ДПР, состоящая из управляемого m-фазного генератора частоты, частотного m-фазного модулятора и узла реверса, причем выход сумматора соединен с первым входом узла реверса, а через узел выделения модуля входного сигнала с первым входом m-фазного модулятора и суммирующим входом дополнительного сумматора, выход которого соединен со входом математической модели электродвигателя, выходной сигнал которой через управляемый m-фазный генератор частоты поступает на второй m-фазный вход модулятора, m-фазный выход которого соединен со вторым m-фазным входом узла реверса, выход которого поступает на вход m-фазного силового блока, а выходной сигнал датчика тока электродвигателя поступает на вычитающий вход дополнительного сумматора. Форма переменного сигнала на выходе управляемого генератора частоты может быть синусоидальной или прямоугольной (меандр), а количество фаз определяется типом электродвигателя.
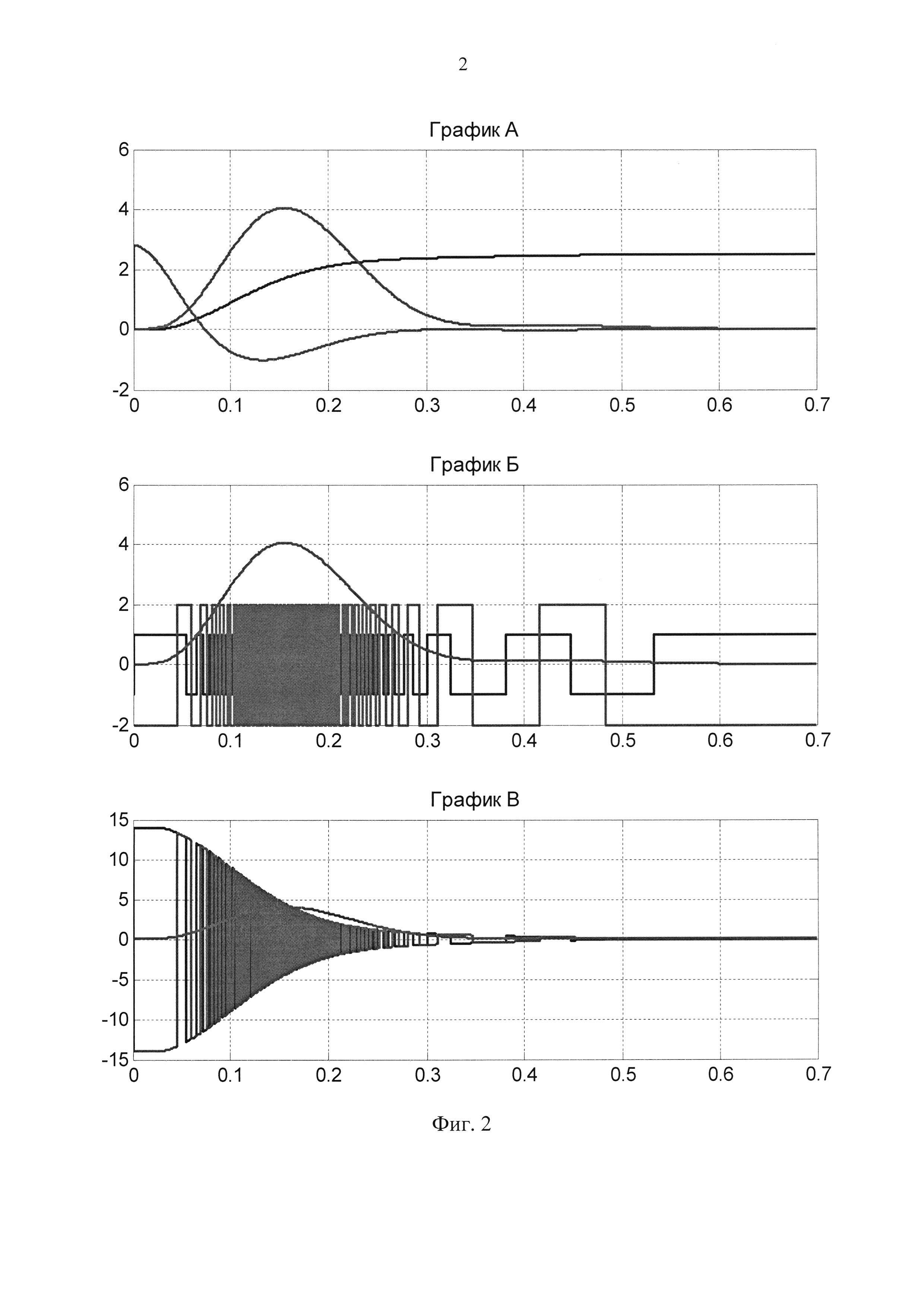
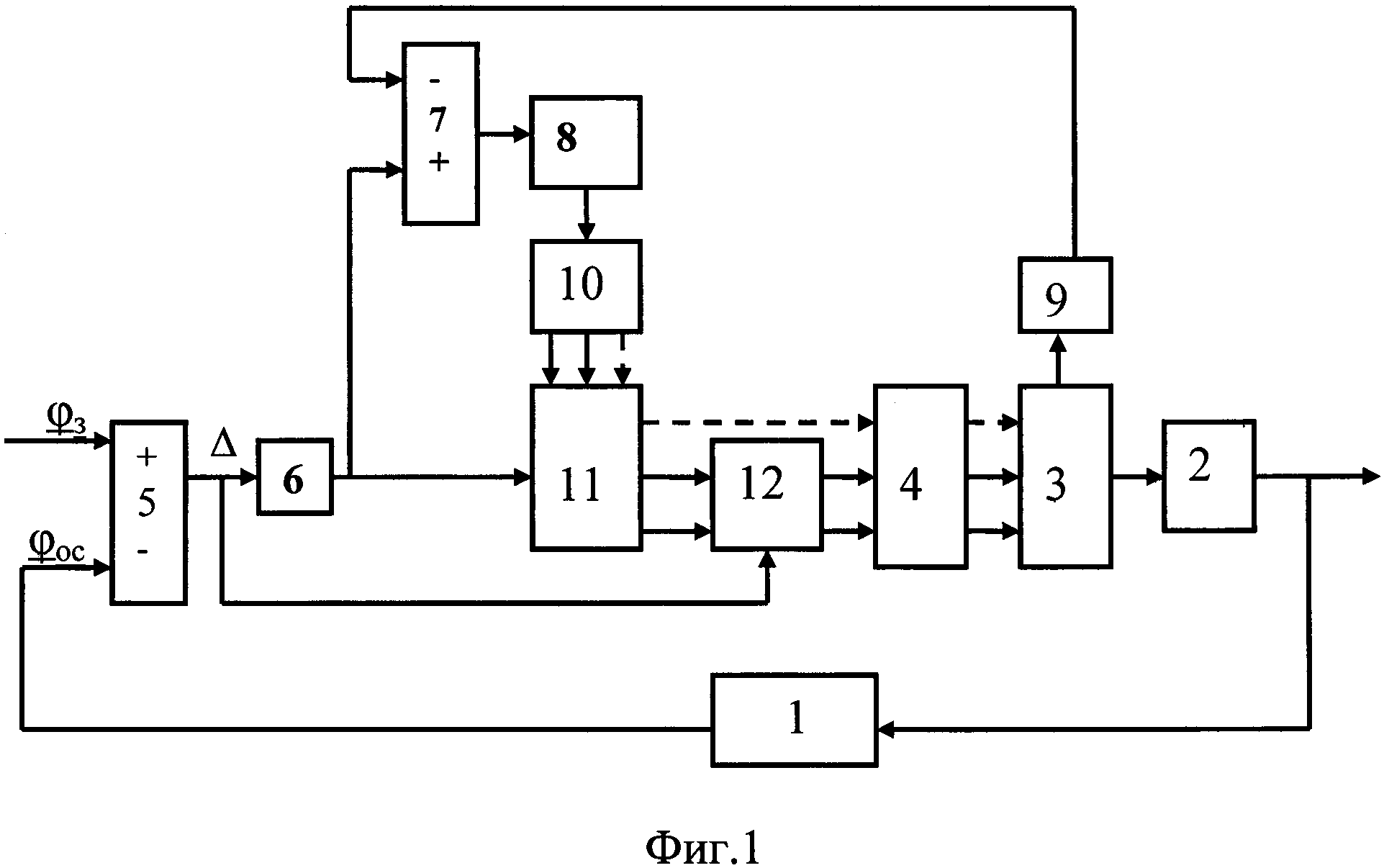
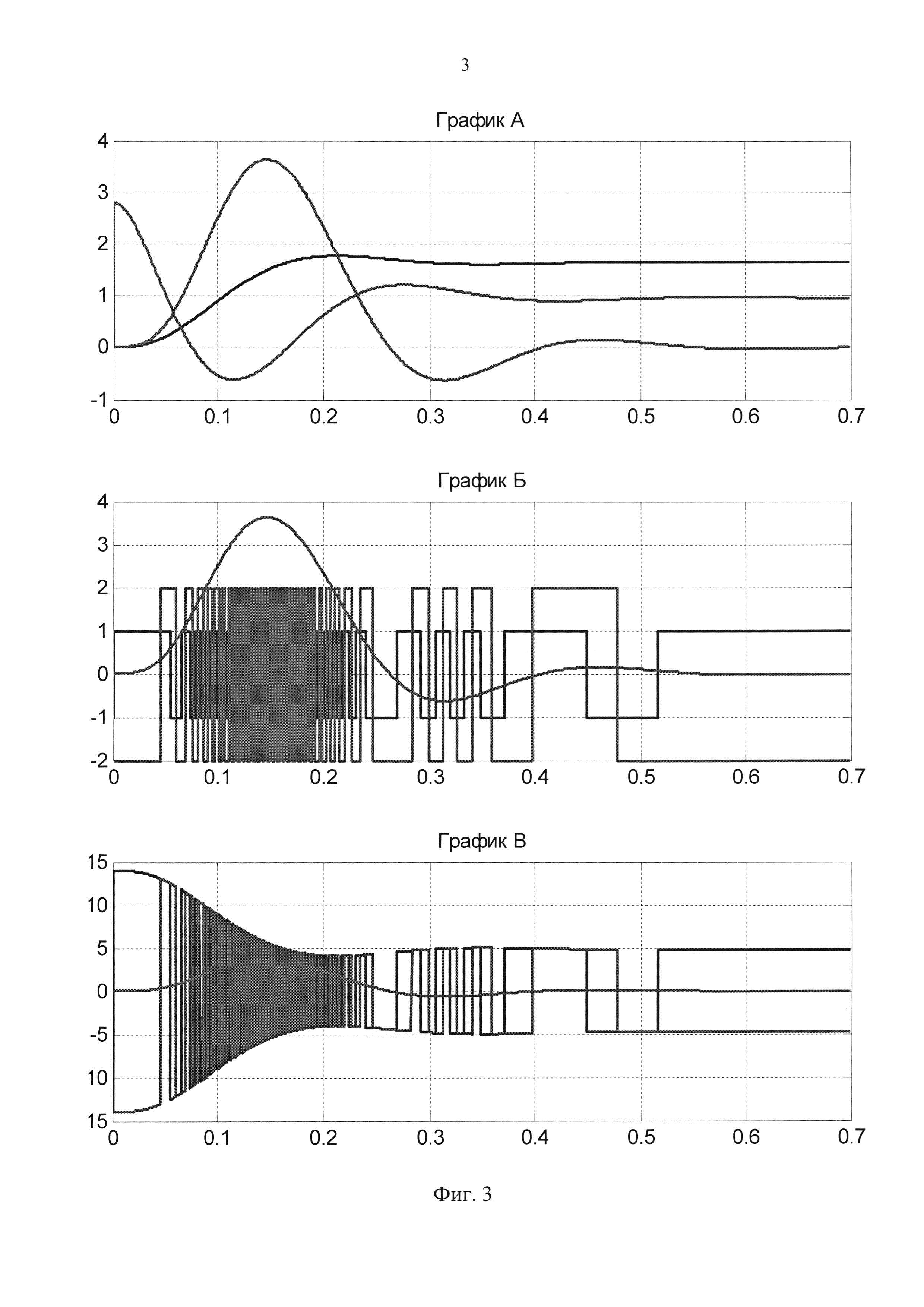
На фиг. 1 показан пример функциональной схемы предлагаемого БМП на базе 2-фазного синхронного электродвигателя и управляемого генератора частоты прямоугольной формы; на фиг. 2, 3 - эпюры напряжений дополнительно введенных элементов функциональной схемы, поясняющие процесс формирования сигналов управления синхронным электродвигателем на примере отработки электроприводом ступенчатого входного сигнала без нагрузки и с нагрузкой соответственно на его выходном звене, где:
График А - изменение положения и скорости выходного звена БМП и тока электродвигателя;
График Б - изменение входного и выходного сигналов управляемого генератора частоты;
График В - изменение сигнала на первом входе (огибающая) и выходе модулятора.
БМП содержит датчик положения выходного звена электропривода 1, редуктор 2, 2-фазный синхронный электродвигатель 3, силовой блок 4, сумматор 5, узел выделения модуля входного сигнала 6, дополнительный сумматор 7, математическую модель электродвигателя 8, датчик тока электродвигателя 9 и математическую модель ДПР, состоящую из управляемого 2-фазного генератора частоты 10, частотного 2-фазного модулятора 11 и узла реверса 12.
БМП работает следующим образом (фиг. 1).
На суммирующий вход сумматора 5 поступает сигнал заданного положения выходного звена БМП ϕз, а на вычитающий вход сумматора 5 поступает сигнал обратной связи ϕос с датчика положения выходного звена электропривода 1. С выхода сумматора 5 сигнал ошибки, равный Δ=ϕз-ϕос, поступает на первый вход узла реверса 12 и на вход узла выделения модуля входного сигнала 6, с выхода которого модуль сигнала ошибки Δ поступает на первый вход модулятора 11 и через суммирующий вход дополнительного сумматора 7 на вход математической модели электродвигателя 8. Сигнал с выхода математической модели электродвигателя 8, являющийся заданной скоростью электродвигателя 3, поступает на вход управляемого генератора частоты 10. С выхода управляемого генератора частоты 10 2-фазный меандр постоянной амплитуды и частотой, пропорциональной выходному сигналу математической модели электродвигателя 8 (фиг. 2, 3 график Б), поступает на второй 2-фазный вход модулятора 11. 2-фазный выходной сигнал модулятора 11 через второй 2-фазный вход узла реверса 12 и силовой блок 4 поступает на фазные обмотки синхронного электродвигателя 3, обеспечивая через редуктор 2 перемещение выходного звена БМП со скоростью, заданной математической моделью электродвигателя 8. Поступающий на вычитающий вход дополнительного сумматора 7 выходной сигнал датчика тока 9 обеспечивает обратную связь по нагрузке на выходном звене БМП. В установившемся состоянии после окончания переходного процесса при отсутствии нагрузки на выходном звене электропривода входной сигнал управления отрабатывается без статической ошибки и ток электродвигателя равен нулю (фиг. 2, график А). При этом уменьшение скорости электродвигателя 3, при увеличении нагрузки на выходном звене БМП, приводит к увеличению тока электродвигателя 3, а значит и выходного сигнала датчика тока 9. Увеличение выходного сигнала датчика тока 9, поступающего на вычитающий вход дополнительного сумматора 7, уменьшает сигнал заданной скорости с выхода математической модели электродвигателя 8 и выходную частоту управляемого генератора 10. В установившемся состоянии после окончания переходного процесса при наличии нагрузки на выходном звене электропривода входной сигнал управления отрабатывается со статической ошибкой и ток электродвигателя не равен нулю (фиг. 3, график А). Таким образом, формируется на выходе модулятора 11 сигнал управления силовым блоком 4, представляющий собой переменное 2-фазное напряжение прямоугольной формы, частота которого пропорциональна сигналу заданной скорости с выхода математической модели электродвигателя 8, а амплитуда равна сигналу ошибки Δ=ϕз-ϕос, т.е. отклонению текущего положения выходного звена БМП от заданного положения (фиг. 2, 3 график В). Реверс синхронного электродвигателя 3 осуществляется путем смены двух фаз, поступающих на второй 2-фазный вход узла реверса 12 при изменении полярности сигнала Δ, поступающего на его первый вход. В случае использования 3-фазного синхронного электродвигателя 3 управляемый генератор частоты 10 должен формировать 3-фазное напряжение, поступающее на второй 3-фазный вход модулятора 11, а с его 3-фазного выхода третья фаза поступает на 3-фазный вход силового блока 4, минуя узел реверса 12. Штрихпунктирной линией показана третья фаза в случае использования 3-фазного синхронного электродвигателя.
Бесконтактный моментный привод, содержащий датчик положения выходного звена электропривода, редуктор, синхронный m-фазный электродвигатель, фазные обмотки которого связаны с m-фазным выходом силового блока, датчик тока электродвигателя и сумматор, вычитающий вход которого соединен с выходом датчика положения выходного звена электропривода, а на суммирующий вход сумматора поступает сигнал заданного положения выходного звена электропривода, отличающийся тем, что с целью упрощения в него дополнительно введены узел выделения модуля входного сигнала, сумматор, математическая модель электродвигателя и математическая модель датчика положения ротора электродвигателя, состоящая из управляемого m-фазного генератора частоты, частотного m-фазного модулятора и узла реверса, причем выход сумматора соединен с первым входом узла реверса, а через узел выделения модуля входного сигнала с первым входом m-фазного модулятора и с суммирующим входом дополнительного сумматора, выход которого соединен со входом математической модели электродвигателя, выходной сигнал которой через управляемый m-фазный генератор частоты поступает на второй m-фазный вход модулятора, m-фазный выход которого соединен со вторым m-фазным входом узла реверса, выход которого поступает на вход m-фазного силового блока, а выходной сигнал датчика тока электродвигателя поступает на вычитающий вход дополнительного сумматора.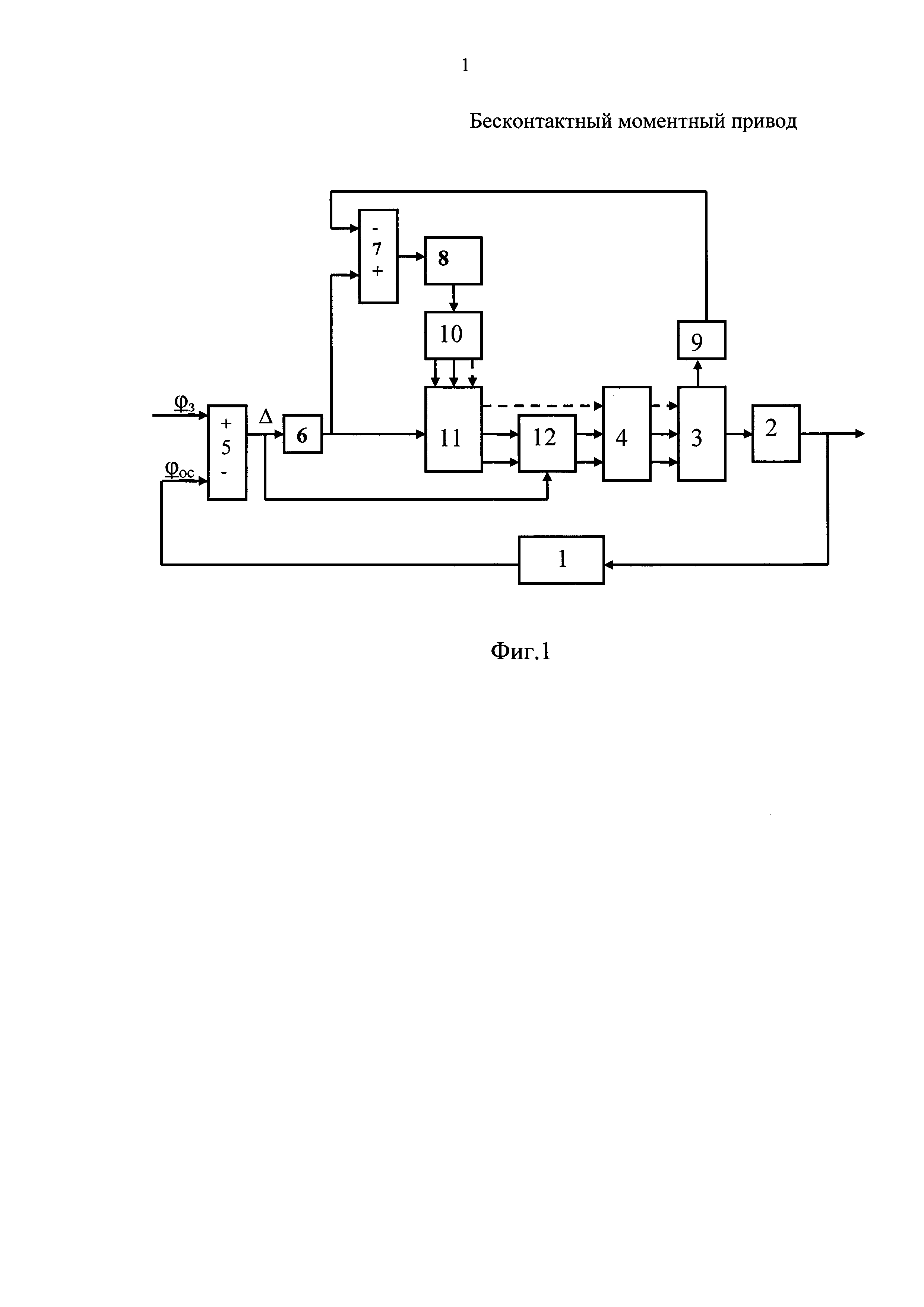
Дроссельный электрогидропривод
Дроссельный электрогидропривод
Дроссельный электрогидропривод
Устройство для определения углов крена и дифферента подвижных объектов
Способ формирования механической характеристики электропривода постоянного тока
Устройство фильтрации для оценки угловой скорости летательного аппарата
Дроссельный электрогидропривод
Способ формирования механической характеристики электропривода постоянного тока
Устройство фильтрации для оценки угловой скорости летательного аппарата
Триммерный механизм

