Результат интеллектуальной деятельности: БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ ВЕРТИКАЛЬ НА "ГРУБЫХ" ЧУВСТВИТЕЛЬНЫХ ЭЛЕМЕНТАХ
Вид РИД
Изобретение
Изобретение относится к бесплатформенным инерциальным вертикалям (БИВ) и может найти применение в микро-, мини- и легких беспилотных летательных аппаратах (БЛА) для определения угловой ориентации относительно местной вертикали при выполнении сложных маневров, в том числе и фигур высшего пилотажа.
Аналогом заявляемого устройства является «Бесплатформенная инерциальная система ориентации на «грубых» чувствительных элементах» [1], содержащая блок чувствительных элементов из трех акселерометров и трех датчиков угловых скоростей по трем ортогональным осям, систему воздушных сигналов, магнитный компас, блок измерения (или определения) параметров движения носителя, несколько (преимущественно три) вычислительных платформ, мастер-фильтр, причем каждая из вычислительных платформ содержит блок пересчета ускорений из связанной в навигационную систему координат, блок вычисления линейных и угловых скоростей навигационной системы координат, первый и второй блоки кватернионных вычислений, блок вычисления матрицы направляющих косинусов и вычисления углов ориентации, блок формирования сигналов демпфирования, а третья вычислительная платформа дополнительно содержит адаптивный фильтр Калмана.
Известное устройство избыточно по составу и требует значительного объема вычислительных ресурсов. При выполнении летательным аппаратом фигур высшего пилотажа с вращением в трех взаимно перпендикулярных плоскостях фактические погрешности известного устройства могут превышать представленные в графическом материале [1, фиг. 6, фиг. 7], что не оправдывает его существенное усложнение. Для начальной выставки необходимо использование внешней информации с блока измерения (или определения) параметров движения носителя.
Наиболее близким к заявляемому устройству по технической сущности является бесплатформенная инерциальная курсовертикаль (БИКВ), представленная в группе изобретений «Навигационный комплекс, устройство вычисления скорости и координат, бесплатформенная инерциальная курсовертикаль, способ коррекции инерциальных датчиков и устройство для его осуществления» [2], содержащая трехканальный блок датчиков линейных ускорений, трехстепенной магнитный датчик направления, трехканальный блок датчиков угловых скоростей, формирователь производных от углов ориентации, блок коррекции, блок интеграторов, блок вычисления погрешности угловой ориентации, фильтр, блок вычисления наблюдаемой вертикали, блок выработки признаков включения коррекции угловой ориентации, блок оценки присутствия погрешности угловой ориентации, блок вычисления погрешности наблюдаемых углов ориентации, блок коррекции магнитного курса, блок режима коррекции.
К недостаткам известного устройства следует отнести необходимость в использовании внешних корректирующих устройств (спутниковой радионавигационной системы и/или системы радиолокационных измерений), невозможность точной начальной выставки трехканального блока датчиков угловых скоростей, ограничение измерения угла тангажа из-за наличия особых точек, например, при угле тангажа, равном ±π/2.
Общими признаками заявляемой БИВ и прототипа [2] являются трехканальный блок датчиков линейных ускорений, трехканальный блок датчиков угловых скоростей, блок коррекции угловых скоростей, блок вычисления погрешности угловой ориентации, блок вычисления наблюдаемой вертикали, блок выработки признаков включения коррекции угловой ориентации, блок оценки присутствия погрешности по угловой скорости, блок режима коррекции.
Решаемой технической задачей предлагаемого изобретения является обеспечение начальной выставки вертикали и датчиков угловых скоростей без использования внешней информации; сохранение высокой точности определения местной вертикали при использовании микромеханических датчиков низкой точности (погрешности датчиков угловых скоростей до 0,2°/с; погрешности датчиков линейных ускорений до 0,05 м/с2) без использования внешней коррекции, сохранение работоспособности при выполнении летательным аппаратом фигур высшего пилотажа с вращением в трех взаимно перпендикулярных плоскостях.
Техническим результатом является построение всережимной микроминиатюрной бесплатформенной инерциальной вертикали на «грубых» чувствительных элементах с высокими техническими характеристиками без использования внешней информации.
Поставленная задача решается за счет того, что в БИВ дополнительно введены блок начальной выставки датчиков угловых скоростей, блок вычисления параметров Родрига-Гамильтона кватерниона начальной ориентации, блок вычисления параметров Родрига-Гамильтона кватерниона текущей ориентации, блок вычисления углов крена и тангажа, причем выход трехканального блока датчиков линейных ускорений подключен к входу блока вычисления наблюдаемой вертикали, выход которого подключен к первому входу блока вычисления параметров Родрига-Гамильтона кватерниона начальной ориентации, второму входу блока выработки признаков включения коррекции угловой ориентации и третьему входу блока вычисления погрешности угловой ориентации, выход блока вычисления параметров Родрига-Гамильтона кватерниона начальной ориентации подключен к первому входу блока вычисления параметров Родрига-Гамильтона кватерниона текущей ориентации, выход которого подключен к входу блока вычисления углов крена и тангажа и является выходом БИВ для массива параметров Родрига-Гамильтона кватерниона текущей ориентации, выход блока вычисления углов крена и тангажа подключен к четвертому входу блока вычисления погрешности угловой ориентации, ко второму входу блока оценки присутствия погрешности по угловой скорости и является выходом БИВ для массива углов крена и тангажа, выход блока вычисления погрешности угловой ориентации подключен к первому входу блока оценки присутствия погрешности по угловой скорости, выход которого подключен ко второму входу блока коррекции угловых скоростей, выход блока выработки признаков включения коррекции угловой ориентации подключен к первому входу блока вычисления погрешности угловой ориентации, выход блока режима коррекции подключен ко вторым входам блока начальной выставки датчиков угловых скоростей, блока вычисления параметров Родрига-Гамильтона кватерниона начальной ориентации и блока вычисления погрешности угловой ориентации, выход трехканального блока датчиков угловых скоростей подключен к первому входу блока начальной выставки датчиков угловых скоростей, выход которого подключен к первым входам блока выработки признаков включения коррекции угловой ориентации и блока коррекции угловых скоростей, выход блока коррекции угловых скоростей подключен ко второму входу блока вычисления параметров Родрига-Гамильтона кватерниона текущей ориентации.
Предлагаемое изобретение поясняется следующими графическими материалами, где представлены:
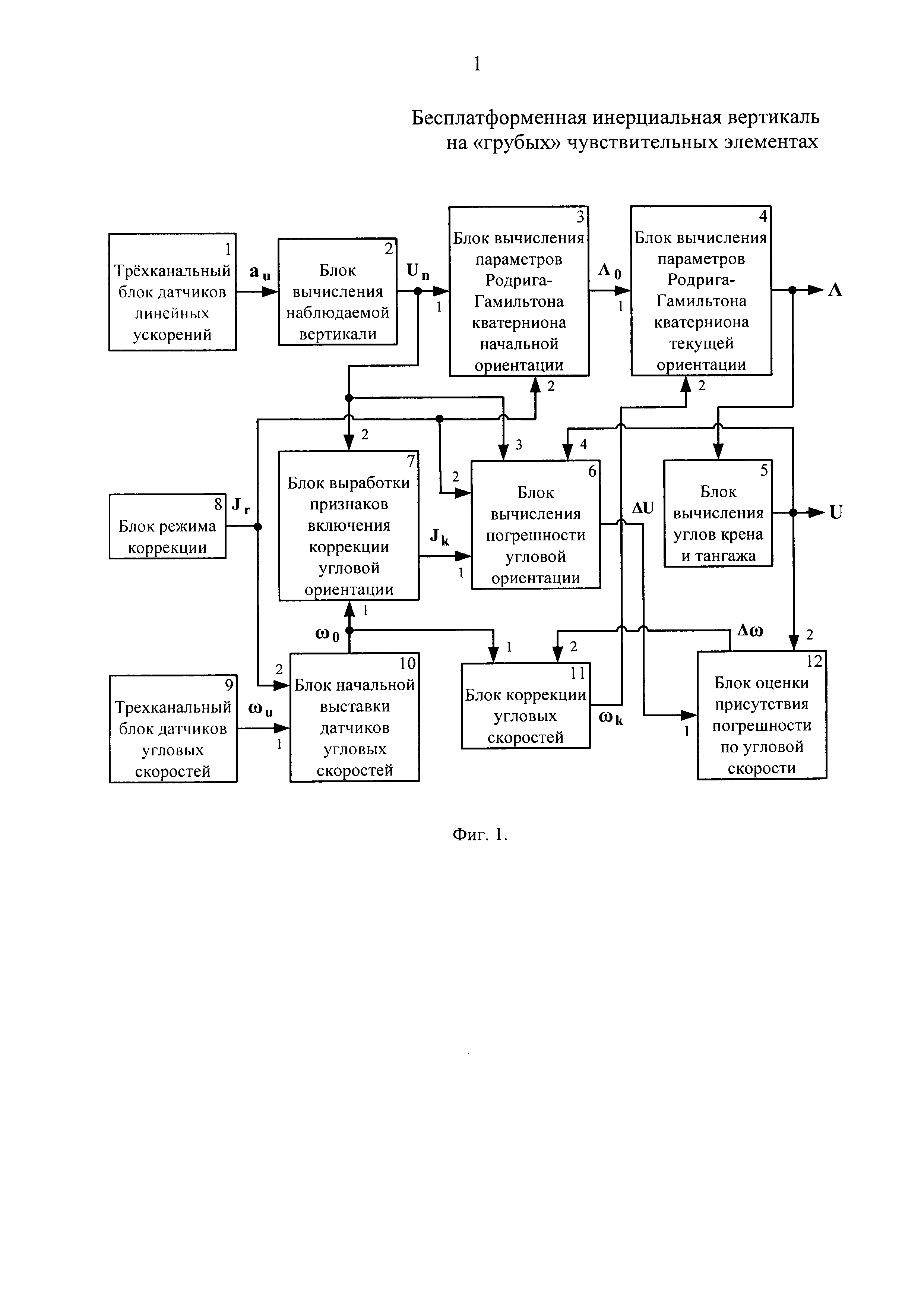
на фиг. 1 - блок-схема бесплатформенной инерциальной вертикали на «грубых» чувствительных элементах, на которой показаны: 1 - трехканальный блок датчиков линейных ускорений; 2 - блок вычисления наблюдаемой вертикали; 3 - блок вычисления параметров Родрига-Гамильтона кватерниона начальной ориентации; 4 - блок вычисления параметров Родрига-Гамильтона кватерниона текущей ориентации; 5 - блок вычисления углов крена и тангажа; 6 - блок вычисления погрешности угловой ориентации; 7 - блок выработки признаков включения коррекции угловой ориентации; 8 - блок режима коррекции; 9 - трехканальный блок датчиков угловых скоростей; 10 - блок начальной выставки датчиков угловых скоростей; 11 - блок коррекции угловых скоростей; 12 - блок оценки присутствия погрешности по угловой скорости; au - вектор измеренного линейного ускорения; Un - вектор наблюдаемой вертикали; Λ0 - массив параметров Родрига-Гамильтона кватерниона начальной ориентации; Λ - массив параметров Родрига-Гамильтона кватерниона текущей ориентации; U - массив углов крена и тангажа; ΔU - вектор погрешности угловой ориентации; Jk - массив признаков включения коррекции угловой ориентации; Jr - массив признаков режима коррекции; ωu - вектор измеренной угловой скорости; ω0 - вектор угловой скорости после начальной выставки; ωk - вектор угловой скорости после коррекции; Δω - вектор оценки присутствия погрешности по угловой скорости;
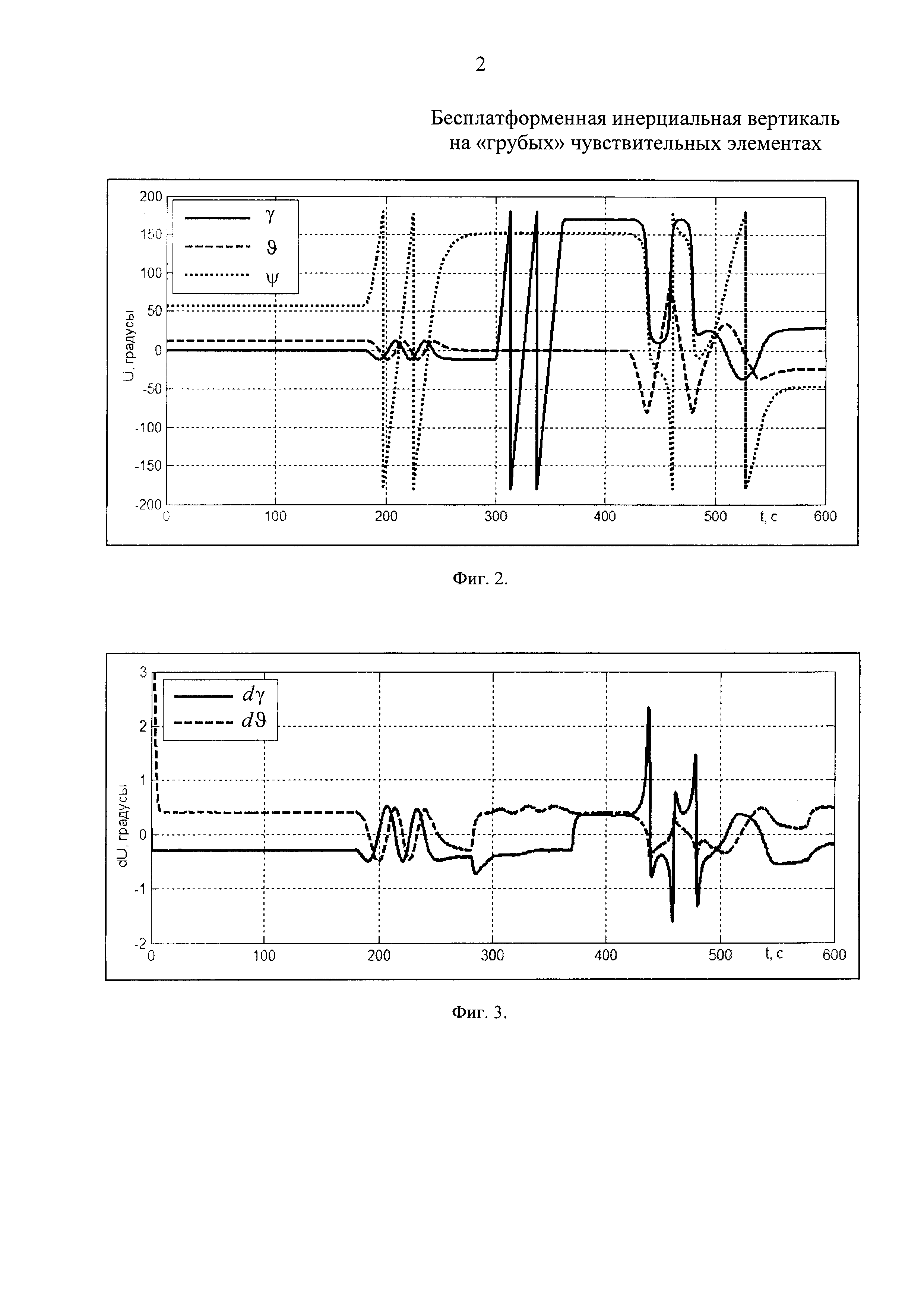
на фиг. 2 - характеристики изменения углов крена (γ), тангажа (ϑ) и рысканья (ψ) при движении летательного аппарата с вращением относительно вертикальной, продольной и поперечной осей;
на фиг. 3. - погрешности бесплатформенной инерциальной вертикали по углам крена (dγ) и тангажа (dϑ) при движении летательного аппарата с вращением относительно вертикальной, продольной и поперечной осей.
БИВ вычисляет массив параметров Родрига-Гамильтона  , представленный массивом Λ, и массив углов крена и тангажа БЛА
, представленный массивом Λ, и массив углов крена и тангажа БЛА  , представленный массивом U. Вычисления выполняются соответствующей обработкой вектора линейных ускорений
, представленный массивом U. Вычисления выполняются соответствующей обработкой вектора линейных ускорений  и вектора угловых скоростей
и вектора угловых скоростей  по трем ортогональным осям, измеренных трехканальным блоком датчиков линейных ускорений и трехканальным блоком датчиков угловых скоростей. На выходе блока 1 формируется вектор измеренного линейного ускорения
по трем ортогональным осям, измеренных трехканальным блоком датчиков линейных ускорений и трехканальным блоком датчиков угловых скоростей. На выходе блока 1 формируется вектор измеренного линейного ускорения  , на выходе блока 9 формируется вектор измеренной угловой скорости
, на выходе блока 9 формируется вектор измеренной угловой скорости  . Измерения выполняются на всех режимах, которые задаются в блоке 8 массивом
. Измерения выполняются на всех режимах, которые задаются в блоке 8 массивом  , где Jr1 принимает единичное значение в состоянии покоя БЛА, a Jr2 принимает единичное значение в состоянии полета БЛА, в ином состоянии Jr1 и Jr2 принимают нулевые значения.
, где Jr1 принимает единичное значение в состоянии покоя БЛА, a Jr2 принимает единичное значение в состоянии полета БЛА, в ином состоянии Jr1 и Jr2 принимают нулевые значения.
Блок 2 вычисляет вектор наблюдаемой вертикали [3, с. 161-162]
 .
.
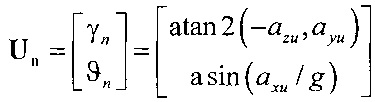
Блок 3 вычисляет нормированный массив параметров Родрига-Гамильтона кватерниона начальной ориентации [3, с.144, с.148-149]
 ,
,
где функция  обеспечивает изменение параметров Родрига-Гамильтона кватерниона начальной ориентации в соответствии с изменением вектора наблюдаемой вертикали при Jr1=1 и их фиксация с момента обнуления Jr1; s - оператор преобразования Лапласа.
обеспечивает изменение параметров Родрига-Гамильтона кватерниона начальной ориентации в соответствии с изменением вектора наблюдаемой вертикали при Jr1=1 и их фиксация с момента обнуления Jr1; s - оператор преобразования Лапласа.
Блок 10 выполняет начальную выставку датчиков угловых скоростей, вычисляет вектор угловой скорости после начальной выставки  в соответствии с вычислительной процедурой
в соответствии с вычислительной процедурой
 ,
,
где функция  обеспечивает введение компенсирующей составляющей в измерения угловых скоростей, обнуляющей погрешности трехканального блока датчиков угловых скоростей при Jr1=1и фиксацию компенсирующей составляющей с момента обнуления Jr1; s - оператор преобразования Лапласа.
обеспечивает введение компенсирующей составляющей в измерения угловых скоростей, обнуляющей погрешности трехканального блока датчиков угловых скоростей при Jr1=1и фиксацию компенсирующей составляющей с момента обнуления Jr1; s - оператор преобразования Лапласа.
Блок 7 вырабатывает признаки включения коррекции угловой ориентации при равномерном прямолинейном полете БЛА. Отклонение от равномерного полета приводит к отклонению наблюдаемой вертикали от истинной, о чем свидетельствует отклонение производных наблюдаемых углов ориентации от нуля. Отклонение от прямолинейного полета приводит к возникновению угловых скоростей, отличных от нуля. Массив признаков включения коррекции угловой ориентации  представим признаком равномерного полета Jku и признаком прямолинейного полета Jkω, которые принимают значения единицы или нуля в соответствии с условиями:
представим признаком равномерного полета Jku и признаком прямолинейного полета Jkω, которые принимают значения единицы или нуля в соответствии с условиями:
если |γns|∧|ϑns|<dUmax, то Jku=1, иначе Jku=0;
если |ωx0|∧|ωy0|∧|ωz0|<ωmax, то Jkω=1, иначе Jkω=0,
где предельные значения dUmax и ωmax выбираются в соответствии с допустимой погрешностью определения вертикали; рекомендуется dUmax и ωmax выбирать в пределах 0,001…0,01 рад/с при указанных выше погрешностях датчиков угловых скоростей, s - оператор преобразования Лапласа.
Блок 6 вычисляет вектор погрешности угловой ориентации
 ,
,
где ±ΔUОГР - ограничение погрешности угловой ориентации, определяется допустимой погрешностью вычисления вертикали.
По величине погрешности угловой ориентации вертикали  блок 12 оценивает присутствие погрешности по угловой скорости, вычисляя вектор оценки присутствия погрешности по угловой скорости ∆ω в проекциях на оси связанной системы координат
блок 12 оценивает присутствие погрешности по угловой скорости, вычисляя вектор оценки присутствия погрешности по угловой скорости ∆ω в проекциях на оси связанной системы координат 
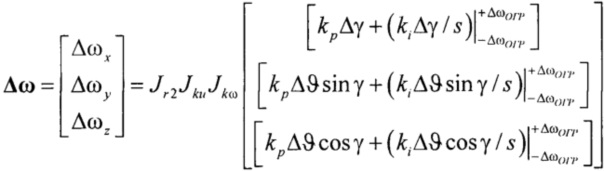 ,
,
где ±ΔωОГР - ограничение погрешности по угловой скорости, выбирается в соответствии с погрешностью датчиков угловых скоростей; s - оператор преобразования Лапласа.
Компоненты вектора Δω не определяют точные значения погрешности трехканального блока датчиков угловых скоростей, но их отличие от нуля показывает, что погрешности присутствуют.
Блок 11 выполняет коррекцию угловых скоростей, вычисляет вектор угловой скорости после коррекции 

Блок 4 вычисляет нормированный массив параметров Родрига-Гамильтона кватерниона текущей ориентации [3, с. 144, с. 155]
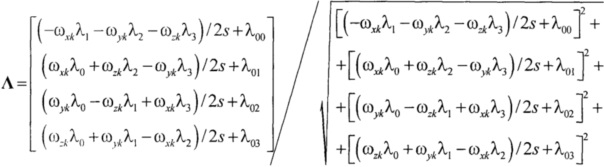 .
.
Блок 5 вычисляет массив углов крена и тангажа БЛА  [3, с.156].
[3, с.156].
 .
.
Исследование бесплатформенной инерциальной вертикали на «грубых» чувствительных элементах показало, что при полете БЛА с вращением относительно вертикальной и продольной осей на углы более 180 градусов (см. фиг. 2) погрешности по углам крена (dγ) и тангажа (dϑ) (см. фиг. 3) не превышают 0,5 градуса, а при вращении относительно поперечной оси достигают 2 градусов.
Таким образом, заявляемая бесплатформенная инерциальная вертикаль на «грубых» чувствительных элементах позволяет построить всережимную микроминиатюрную БИВ с высокими техническими характеристиками без использования внешней информации.
Источники информации
1. Патент RU 2382988, Бесплатформенная инерциальная система ориентации на «грубых» чувствительных элементах, опубл. 27.02.2010 г. Бюл. №6 (Аналог).
2. Патент RU 2373498, Навигационный комплекс, устройство вычисления скорости и координат, бесплатформенная инерциальная курсовертикаль, способ коррекции инерциальных датчиков и устройство для его осуществления, опубл. 20.11.2009 г. Бюл. №32 (Прототип).
3. Основы построения бесплатформенных инерциальных навигационных систем /В.В. Матвеев, В.Я. Распопов/ под общ. ред. д.т.н. В.Я. Распопова. - СПб.: ТНЦ РФ ОАО «Концерн ЦНИИ «Электроприбор», 2009. - 280 с.
Бесплатформенная инерциальная вертикаль на «грубых» чувствительных элементах, содержащая трехканальный блок датчиков линейных ускорений, трехканальный блок датчиков угловых скоростей, блок коррекции угловых скоростей, блок вычисления погрешности угловой ориентации, блок оценки присутствия погрешности по угловой скорости, блок вычисления наблюдаемой вертикали, блок выработки признаков включения коррекции угловой ориентации, блок режима коррекции, отличающаяся тем, что в нее дополнительно введены блок начальной выставки датчиков угловых скоростей, блок вычисления параметров Родрига-Гамильтона кватерниона начальной ориентации, блок вычисления параметров Родрига-Гамильтона кватерниона текущей ориентации, блок вычисления углов крена и тангажа, причем выход трехканального блока датчиков линейных ускорений подключен к входу блока вычисления наблюдаемой вертикали, выход которого подключен к первому входу блока вычисления параметров Родрига-Гамильтона кватерниона начальной ориентации, второму входу блока выработки признаков включения коррекции угловой ориентации и третьему входу блока вычисления погрешности угловой ориентации, выход блока вычисления параметров Родрига-Гамильтона кватерниона начальной ориентации подключен к первому входу блока вычисления параметров Родрига-Гамильтона кватерниона текущей ориентации, выход которого подключен к входу блока вычисления углов крена и тангажа и является выходом бесплатформенной инерциальной вертикали для массива параметров Родрига-Гамильтона кватерниона текущей ориентации, выход блока вычисления углов крена и тангажа подключен к четвертому входу блока вычисления погрешности угловой ориентации, ко второму входу блока оценки присутствия погрешности по угловой скорости и является выходом бесплатформенной инерциальной вертикали для массива углов крена и тангажа, выход блока вычисления погрешности угловой ориентации подключен к первому входу блока оценки присутствия погрешности по угловой скорости, выход которого подключен ко второму входу блока коррекции угловых скоростей, выход блока выработки признаков включения коррекции угловой ориентации подключен к первому входу блока вычисления погрешности угловой ориентации, выход блока режима коррекции подключен ко вторым входам блока начальной выставки датчиков угловых скоростей, блока вычисления параметров Родрига-Гамильтона кватерниона начальной ориентации и блока вычисления погрешности угловой ориентации, выход трехканального блока датчиков угловых скоростей подключен к первому входу блока начальной выставки датчиков угловых скоростей, выход которого подключен к первым входам блока выработки признаков включения коррекции угловой ориентации и блока коррекции угловых скоростей, выход блока коррекции угловых скоростей подключен ко второму входу блока вычисления параметров Родрига-Гамильтона кватерниона текущей ориентации.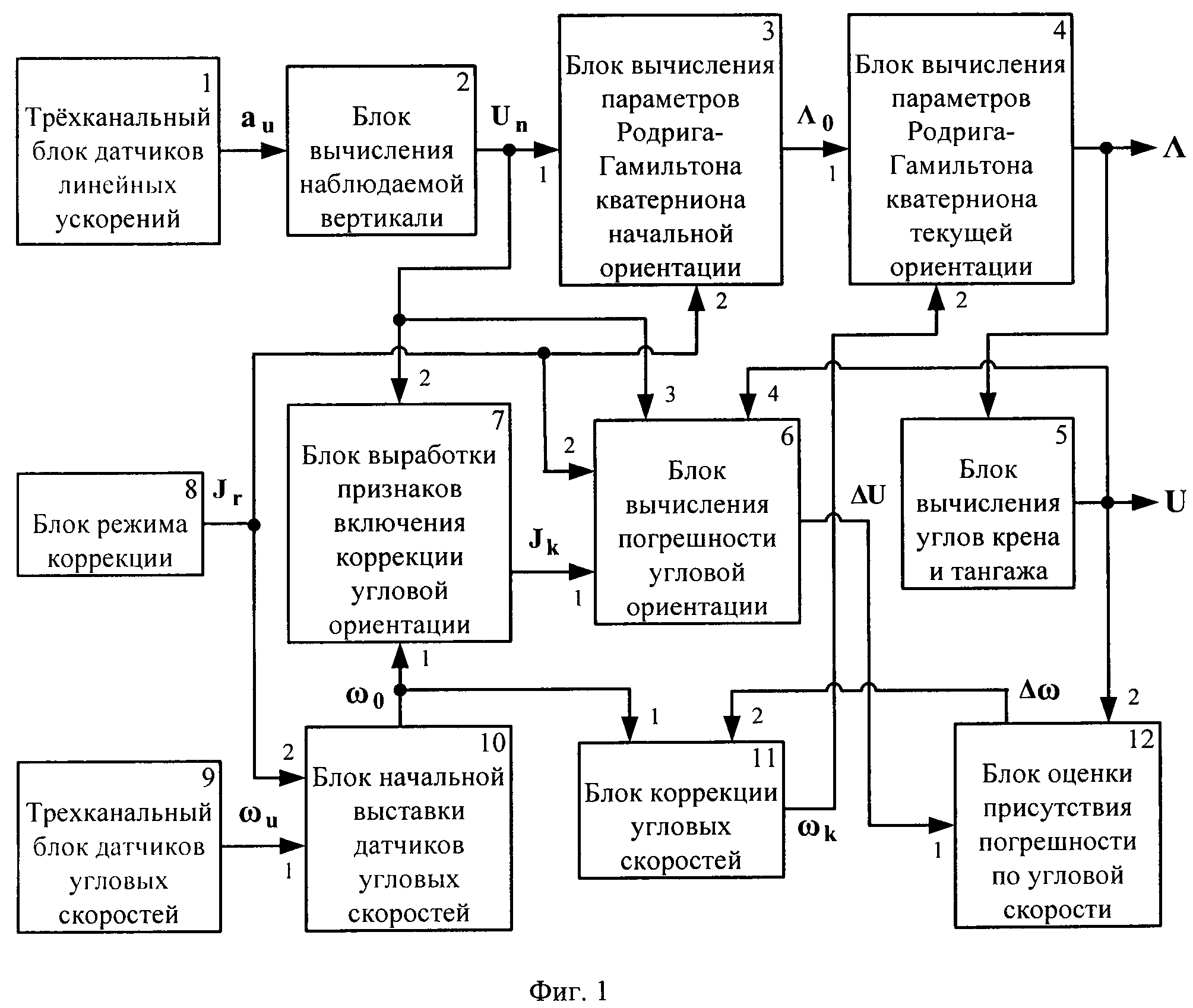
Сырьевая смесь для получения опилкобетонных кирпичей ^методом полусухого вибропрессования
Сырьевая смесь для производства штучных изделий из опилкобетона с добавлением золы-уноса
Бесплатформенная инерциальная курсовертикаль на чувствительных элементах высокой точности
Способ определения взаимного местоположения подвижных объектов в полносвязной радиосети
Сырьевая смесь для получения опилкобетонных кирпичей ^методом полусухого вибропрессования
Сырьевая смесь для производства штучных изделий из опилкобетона с добавлением золы-уноса
Бесплатформенная инерциальная курсовертикаль на чувствительных элементах высокой точности
Способ определения взаимного местоположения подвижных объектов в полносвязной радиосети
Способ удаления поковки из штампа
Способ изготовления плоскопараллельных почвенных шлифов

