Результат интеллектуальной деятельности: Комплексная система подготовки, навигации и управления летательного аппарата
Вид РИД
Изобретение
Изобретение относится к области авиационного приборостроения.
Известны способы и комплексные бортовые навигационные системы ЛА, реализующие полет ЛА по маршруту. Различные аспекты функционирования бортового оборудования ЛА при полете по маршруту, а также описание некоторых из систем, реализующих процедуры подготовки к полету ЛА по маршруту и обеспечивающих управление ЛА при полете по маршруту, приведены в следующих работах:
1. Батенко А.П. Управление конечным состоянием движущихся объектов, М.: Советское радио, 1977. 256.
2. Воробьев Л.М. Воздушная навигация, М.: Машиностроение, 1984. 256.
3. Система планирования и подготовки полетных заданий тактической группы самолетов. Патент РФ на изобретение №2147141. ОАО "РПКБ", 1999.
4. Комплексная система подготовки и навигации ЛА. Патент РФ на изобретение №2434202. ОАО "РПКБ", 2010.
5. Устройство управления траекторией ЛА при полете по маршруту. Патент РФ на изобретение №2444044. ОАО "РПКБ", 2010.
6. Комплексная система навигации и управления ЛА. Патент РФ на изобретение №2481558. ОАО "РПКБ", 2011.
7. Усовершенствованная система планирования полетного задания. Сб. "Новости зарубежной науки и техники", ГОСНИИАС, №11, 1992, с. 11-15.
8. Рогожин В.О. и др. Пилотажно-навигационные комплексы воздушных судов (на украинском языке), К.: НАУ, 2005. 316.
В работах [1, 2, 8] описаны различные теоретические и практические аспекты управления ЛА при полете по маршруту. В патенте [3] и работе [7] описаны наземные системы подготовки полетного задания (СППЗ) для ЛА. В патентах [4, 5, 6] описаны бортовые системы, обеспечивающие полет ЛА по маршруту в соответствии с полетным заданием.
Одной из функций СППЗ является планирование и построение маршрута полета ЛА из исходного пункта маршрута в конечный пункт маршрута в виде последовательности заданных координатами геодезических навигационных точек, соединенных пространственными прямолинейными траекториями. Параметры этого маршрута могут передаваться на борт ЛА при подготовке к вылету посредством переносного носителя данных (ПНД) или по соответствующим каналам информационного взаимодействия наземной и бортовой аппаратуры. Параметры маршрута могут также формироваться экипажем и на борту ЛА с помощью соответствующих бортовых информационно-управляющих систем, например многофункциональных пультов-индикаторов, или передаваться на борт ЛА по соответствующим каналам связи непосредственно в процессе полета.
Учитывая цели предлагаемого изобретения, а также для большей определенности, в дальнейшем тексте заявки считается, что основным оборудованием, с помощью которого формируется и попадает в бортовые базы данных ЛА маршрут полета, являются СППЗ и ПНД.
С учетом целей предлагаемого изобретения считаем, что наиболее близким к нему по технической сущности является устройство, описанное одновременно в книгах [2] (главы 6 и 7), [8] (глава 5, разделы 7.8, 7.9 и 8.1) и патентах [3, 4, 6]. С учетом только существенных для предлагаемого изобретения признаков данное устройство выбирается в качестве прототипа.
Устройство-прототип состоит из наземной системы подготовки полетного задания (СППЗ) и бортового навигационного комплекса (НК), связь между которыми осуществляется посредством переносного носителя данных, причем СППЗ состоит из универсального устройства записи информации на ПНД, универсального видеомонитора и комплекта универсальных устройств управления, соединенных входами-выходами с электронным блоком, включающим взаимосоединенные входами-выходами по универсальной магистрали информационного обмена вычислительно-логический функциональный модуль (ВЛФМ) базы данных картографической информации, ВЛФМ базы данных аэронавигационной информации, ВЛФМ интерактивного формирования маршрута полета, ВЛФМ формирования полетного задания и ВЛФМ записи полетного задания на ПНД, а НК состоит из взаимосоединенных входами-выходами по каналу информационного обмена устройства считывания информации с ПНД, комплекта многофункциональных индикаторов, комплекта навигационно-пилотажных систем, бортовой радиотехнической системы связи и бортовой цифровой вычислительной системы, включающей взаимосоединенные входами-выходами по бортовой магистрали информационного обмена ВЛФМ объединенной базы данных, ВЛФМ формирования навигационно-пилотажных параметров, ВЛФМ формирования отображаемой информации, ВЛФМ формирования управляющих сигналов, ВЛФМ ввода-вывода и управления информационным обменом.
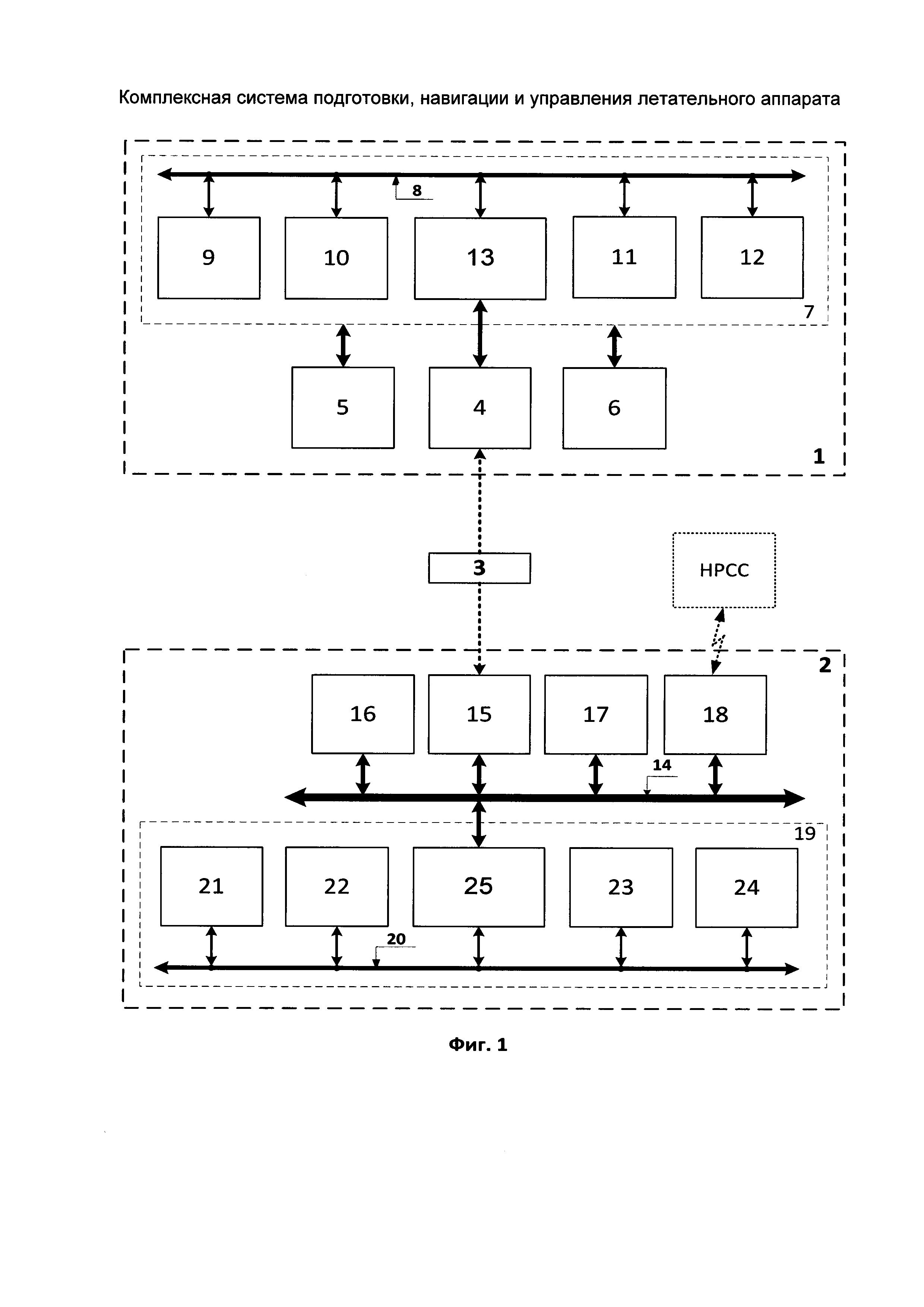
На чертеже (см. фиг. 1) представлена блок-схема устройства-прототипа, на которой обозначены:
1. система подготовки полетного задания (СППЗ);
2. навигационный комплекс (НК);
3. переносной носитель данных (ПНД);
4. универсальное устройство записи информации на ПНД (УЗ);
5. универсальный видеомонитор (ВМ);
6. комплект универсальных устройств управления (УУ);
7. электронный блок (ЭБ);
8. универсальная магистраль информационного обмена (УМИО);
9. ВЛФМ базы данных картографической информации (БДКИ);
10. ВЛФМ базы данных аэронавигационной информации (БДАНИ);
11. ВЛФМ интерактивного формирования маршрута полета ЛА (ФМП);
12. ВЛФМ формирования полетного задания (ФПЗ);
13. ВЛФМ записи полетного задания на ПНД (ЗПЗ);
14. канал информационного обмена (КИО);
15. устройство считывания информации с ПНД (УС);
16. комплект многофункциональных индикаторов (МФИ);
17. комплект навигационно-пилотажных систем (НПС);
18. бортовая радиотехническая система связи (БРСС);
19. бортовая цифровая вычислительная система (БЦВС);
20. бортовая магистраль информационного обмена (БМИО);
21. ВЛФМ объединенной базы данных (ОБД);
22. ВЛФМ формирования навигационно-пилотажных параметров (ФНПП);
23. ВЛФМ формирования отображаемой информации (ФОИ);
24. ВЛФМ формирования управляющих сигналов (ФУС);
25. ВЛФМ ввода-вывода и управления информационным обменом (ВВУИО).
Пунктирные связи на чертеже между блоками 4-3-15 обозначают процедуру перемещения ПНД 3 из наземного УЗ 4 в бортовое УС 15 и обратно. Кроме этого на чертеже обозначена пунктиром непронумерованная и не входящая в состав устройства наземная радиотехническая система связи (НРСС), в которой предусмотрена возможность получения и передачи по эфиру на борт ЛА кодированной информации для корректировки полетного задания.
Система-прототип функционирует следующим образом.
СППЗ 1, которая является наземной частью устройства, обеспечивает планирование и построение маршрута полета ЛА. СППЗ 1 содержит комплект универсальных устройств управления 6 (клавиатура, манипуляторы различного типа), универсальный видеомонитор 5, универсальное устройство записи информации на ПНД 4 и электронный блок 7, который включает в себя взаимосвязанные по УМИО 8 ВЛФМ БДКИ 9, ВЛФМ БДАНИ 10, ВЛФМ ФМП 11, ВЛФМ ФПЗ 12 и ВЛФМ ЗПЗ 13.
Электронный блок 7 является вычислительной системой, при этом все входящие в его состав ВЛФМ исполнены по стандартным вычислительным схемам на основе процессоров и запоминающих устройств.
Сама процедура планирования и построения маршрута полета осуществляется оператором на основе целевого задания на полет путем интерактивного взаимодействия с ВЛФМ БДКИ 9 и ВЛФМ БДАНИ 10 из состава ЭБ 7 посредством УУ 6 и ВМ 5.
Параметры этого маршрута передаются в бортовую часть устройства при подготовке к вылету посредством ПНД 3. ПНД 3 является носителем полетных заданий с долговременной репрограммируемой памятью (типа стандартных флеш-карт).
Информационная взаимосвязь всего оборудования НК 2, который является бортовой частью устройства, осуществляется по КИО 14, включающему электрические, механические, электромеханические связи.
Введенное в ПНД 3 полетное задание ЛА - исходные данные для бортового оборудования, параметры навигационных точек на маршруте, параметры возможных аэродромов базирования и другие данные, через УС 15 и КИО 14 поступают на вход БЦВС 19, а затем через БМИО 20 и ВЛФМ ВВУИО 25 в ВЛФМ ОБД 21.
Параметры маршрута могут также формироваться или корректироваться экипажем непосредственно на борту ЛА с помощью комплекта МФИ 16.
Комплект МФИ 16 содержит "n" многофункциональных индикаторов с цветными жидкокристаллическими экранами.
Комплект НПС 17 включает инерциальные навигационные системы, спутниковые навигационные системы, системы воздушных сигналов и другие системы, измеряющие параметры полета ЛА, которые с входа-выхода НПС 17 через КИО 14 поступают на вход-выход БЦВС 19 и через БМИО 20 и ВЛФМ ВВУИО 25 в ВЛФМ ФНПП 22, ВЛФМ ФОИ 23, ВЛФМ ФУС 24.
БРСС 18 обеспечивает обмен кодированной информацией между наземными пунктами управления и ЛА, в том числе данными, обеспечивающими, при необходимости, оперативное изменение полетного задания ЛА.
ВЦВС 19 является вычислительной системой, при этом все ВЛФМ, входящие в состав ВЦВС 19, исполнены по стандартным вычислительным схемам на основе процессоров и запоминающих устройств.
ВЛФМ ВВУИО 25 через вход-выход осуществляет прием, преобразование и передачу данных во взаимодействующее оборудование через вход-выход БЦВС 19 по КИО 14. Другой вход-выход ВЛФМ ВВУИО 25 подключен к БМИО 20, осуществляющей информационный обмен между всеми ВЛФМ БЦВС 19.
ВЛФМ ОБД 21 выполнен на стандартном долговременном запоминающем устройстве, хранящем данные, поступившие с ПНД 3.
В ВЛФМ ФИНН 22 осуществляется комплексная обработка информации от НПС 17 и ВЛФМ ОБД 21 и формируются текущие навигационно-пилотажные параметры ЛА, поступающие по БМИО 20 в ВЛФМ ФОИ 23 и ВЛФМ ФУС 24.
В ВЛФМ ФОИ 23 по данным, полученным по БМИО 20 от ВЛФМ ОБД 21, ВЛФМ ФНПП 22, ВЛФМ ФУС 24 и от взаимодействующего оборудования через КИО 14 и ВЛФМ ВВУИО 25, формируются обобщенные мнемокадры функциональной, цифробуквенной информации, совмещенной с представлением многофункционального пульта управления. Сформированные мнемокадры изображений с входа-выхода ВЛФМ ФОИ 23 через БМИО 20, ВЛФМ ВВУИО 25 и КИО 14 поступают в МФИ 16 для отображения на экранах с целью принятия экипажем решений по работе с оборудованием НК 2 через обрамляющие экраны многофункциональных индикаторов органов управления (сенсорные кнопки, кнопки-клавиши).
В ВЛФМ ФУС 24 по координатам НТ из ВЛФМ ОБД 21 определяют параметры линий заданного пути (ЛЗП) маршрута, представляющих собой прямые линии кратчайшего расстояния между НТ. По текущим координатам ЛА из ВЛФМ ФНПП 22 и параметрам ЛЗП определяют заданный курс ЛА ψЗ, обеспечивающий полет ЛА по заданному маршруту.
В соответствии с рассогласованием между текущим курсом ЛА ψИ и ψЗ в ВЛФМ ФУС 24 формируется сигнал заданного крена, который используется для управления ЛА для маневра в боковой плоскости. После того, как текущий курс ЛА ψИ сравняется с заданным курсом ψЗ и вектор скорости ЛА будет направлен на НТ, крен ЛА становится равным нулю, и ЛА летит на НТ.
Таким образом, ЛА летит в направлении текущей НТ из заданного маршрута. После пролета НТ происходит смена НТ. В соответствии с полетным заданием из ВЛФМ ОБД 21 выбирается очередная НТ, которая становится текущей, а бывшая текущая НТ становится предыдущей. По координатам предыдущей и текущей НТ и определяются параметры очередной ЛЗП.
Однако, как показывает практика эксплуатации современных ЛА, построение маршрута, состоящего только из прямолинейных траекторий, не всегда и не в полной мере соответствует требованиям по безопасности выполнения полетов. Во многих случаях, например при полете на малой высоте в горных условиях или выполнении взлета или захода на посадку вблизи городских агломераций, единственно возможная траектория полета ЛА имеет сложную геометрическую форму.
Геометрические схемы возможных траекторий полета в горизонтальной плоскости при выполнении взлета или захода на посадку регламентируются соответствующими документами по управлению полетами в зоне соответствующего аэродрома и осуществляются, как правило, в ручном режиме под контролем диспетчера соответствующего центра по управлению полетами с использованием информации от угломерно-дальномерных радиотехнических навигационных систем типа VOR/DME.
Целью предлагаемого изобретения является расширение функциональных возможностей системы и соответственно ЛА за счет повышения степени автоматизации процессов управления ЛА при полете по траектории, имеющей сложную геометрическую форму.
Достижение поставленной цели в предлагаемом изобретении предлагается путем дополнения системы блоками, обеспечивающими включение в маршрут полета траекторий произвольной геометрической формы (ТПФ) с последующей декомпозицией ТПФ непосредственно на борту ЛА, или, предварительно, в составе СППЗ, на несколько взаимосоединенных прямолинейных микротраекторий (ПМТ), количество которых, а также их длину и направление определяют из условия нахождения точек взаимосоединения ПМТ непосредственно на исходной ТПФ, а также из условия о предельно допустимом боковом отклонении ЛА от исходной ТПФ.
С учетом только значимых для изобретения признаков, достижение указанной цели обеспечивается тем, что комплексная система подготовки, навигации и управления летательного аппарата, состоящая из наземной системы подготовки полетного задания (СППЗ) и бортового навигационного комплекса (НК), связь между которыми осуществляется посредством переносного носителя данных (ПНД), причем СППЗ состоит из универсального устройства записи информации на ПНД, универсального видеомонитора и комплекта универсальных устройств управления, соединенных входами-выходами с электронным блоком (ЭБ), включающим взаимосоединенные входами-выходами по универсальной магистрали информационного обмена (УМИО) вычислительно-логические функциональные модули (ВЛФМ) базы данных картографической информации (БДКИ), ВЛФМ базы данных аэронавигационной информации (БДАНИ), ВЛФМ интерактивного формирования маршрута полета ЛА (ФМП), ВЛФМ формирования полетного задания и ВЛФМ записи полетного задания на ПНД, а НК состоит из взаимосоединенных входами-выходами по каналу информационного обмена (КИО) устройства считывания информации с ПНД, комплекта многофункциональных индикаторов, комплекта навигационно-пилотажных систем, радиотехнической системы связи и бортовой цифровой вычислительной системы (БЦВС), включающей взаимосоединенные входами-выходами по бортовой магистрали информационного обмена (БМИО) ВЛФМ объединенной базы данных (ОБД), ВЛФМ формирования навигационно-пилотажных параметров (ФНПП), ВЛФМ формирования отображаемой информации (ФОИ), ВЛФМ формирования управляющих сигналов (ФУС), ВЛФМ ввода-вывода и управления информационным обменом, дополнительно снабжена введенным в состав ЭБ ВЛФМ формирования графического образа пространственной траектории произвольной формы (ТПФ) и ВЛФМ декомпозиции графического образа ТПФ, взаимосоединенными по УМИО с ВЛФМ БДКИ, ВЛФМ БДАНИ и ВЛФМ ФМП, а также введенным в состав БЦВС второго ВЛФМ декомпозиции графического образа ТПФ, взаимосоединенным по БМИО с ВЛФМ ОБД, ВЛФМ ФНПП, ВЛФМ ФОИ и ВЛФМ ФУС.
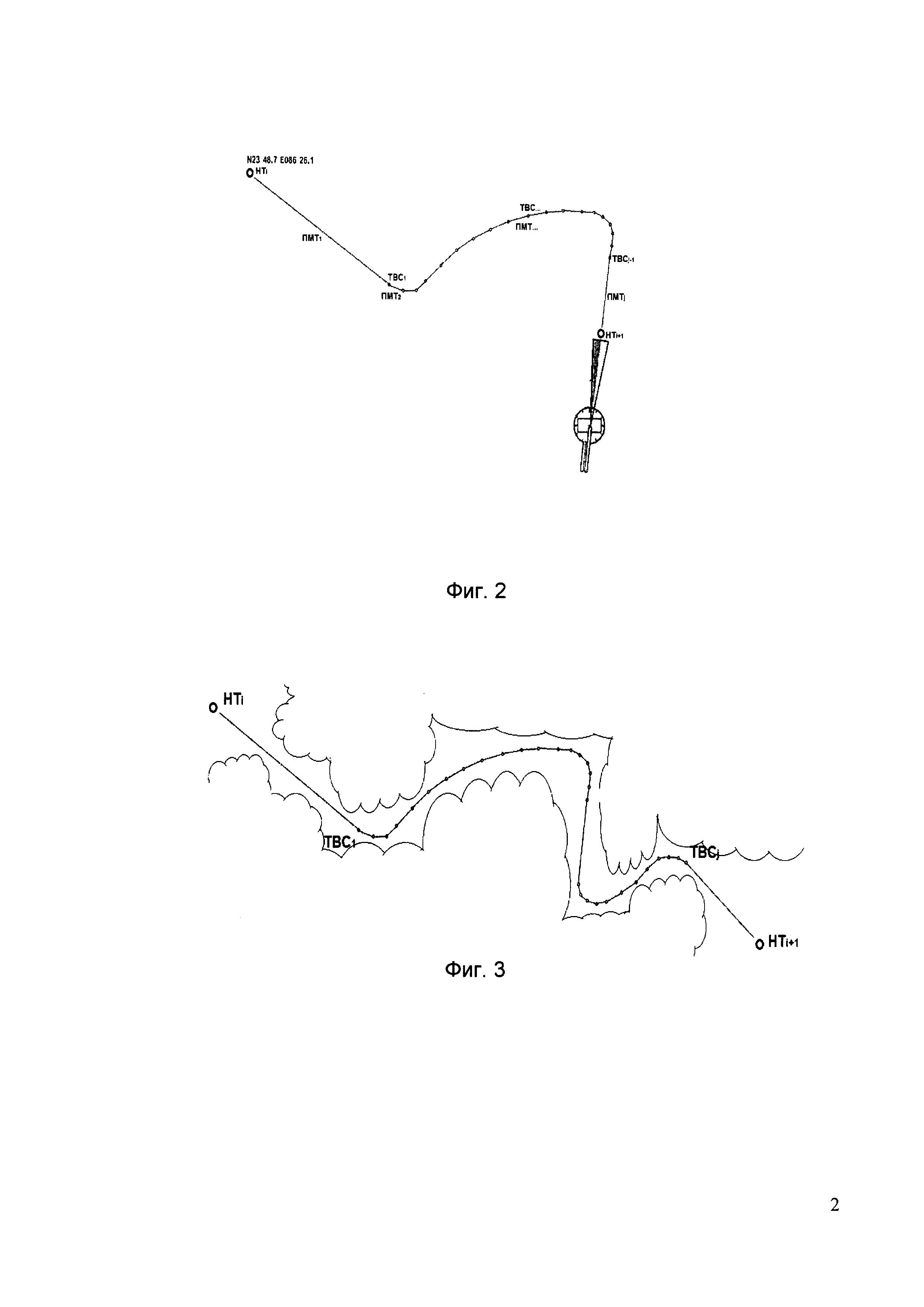
На фигурах 2 и 3 представлены рисунки, иллюстрирующие примеры траекторий, полет по которым обеспечивает предлагаемая система. Рисунки иллюстрируют геометрические схемы декомпозиции ТПФ, соединяющих две НТ из маршрута полета, на несколько ПМТ.
На рисунке фиг. 2 проиллюстрирована декомпозиция траектории входа в зону аэропорта Колката (Индия) с направления 122°. В качестве HTi используется геодезическая точка входа в зону аэропорта. В качестве следующей точки HTi+1 используется геодезическая точка, в которой должно происходить переключение бортовых систем индикации и управления ЛА в режим ПОСАДКА по данным от бортовой посадочной системы ILS.
На рисунке фиг. 3 проиллюстрирована декомпозиция траектории ЛА при облете горных препятствий.
Известно, что основной целью полета ЛА по маршруту является пролет всего маршрута с максимально возможной точностью, т.е. обеспечение на всем маршруте минимального отклонения ЛА от заданной траектории. Как видно из рисунков на фигурах 2 и 3, в изобретении, для того чтобы отклонение ПМТ от ТПФ не превышало заданного значения бокового отклонений ЛА от ТПФ, при декомпозиции ТПФ на ПМТ предлагается осуществлять учет меняющейся кривизны ТПФ.
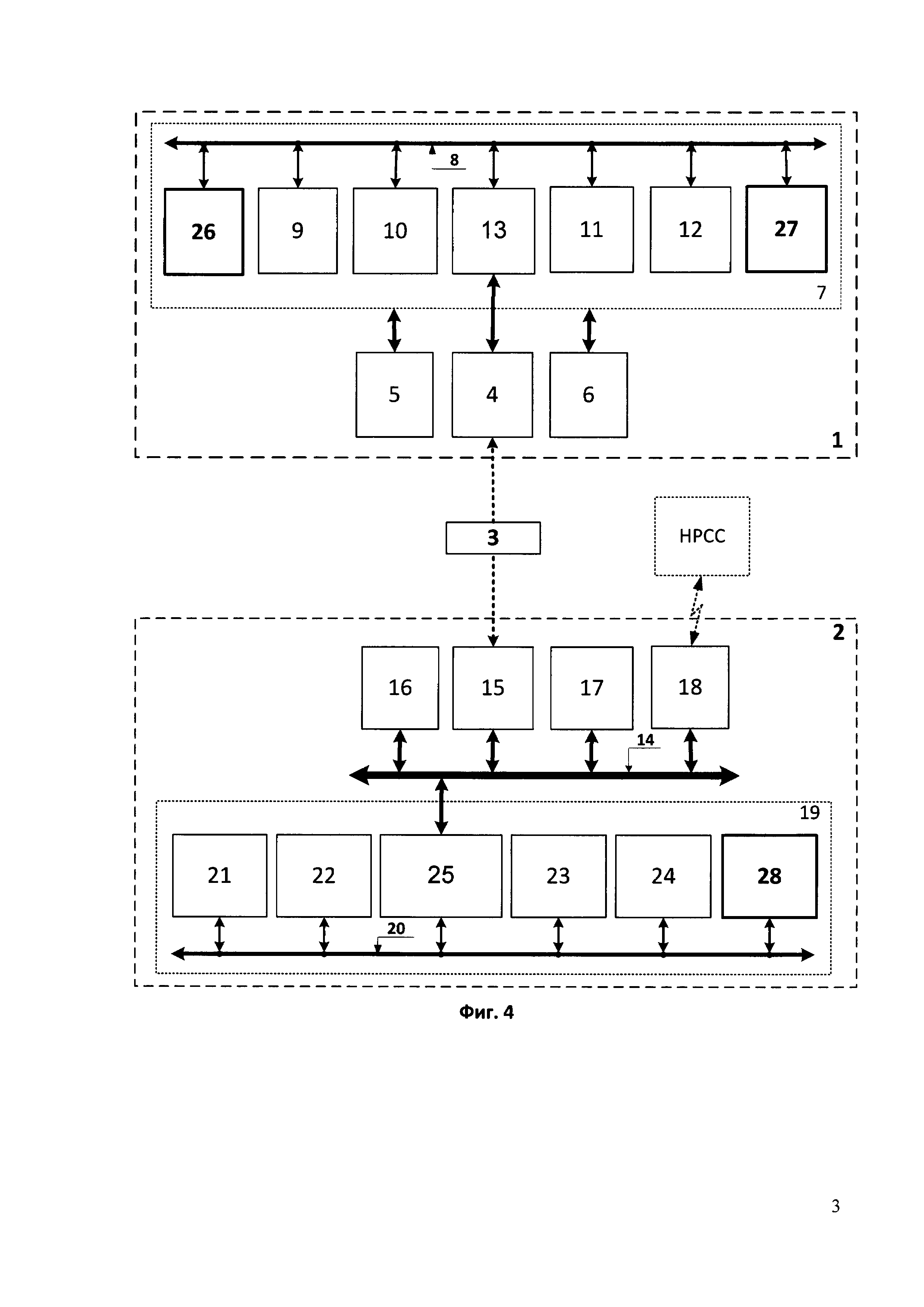
На чертеже (см. фиг. 4) представлена блок-схема предлагаемого устройства, содержащего:
1. систему подготовки полетного задания (СППЗ);
2. навигационный комплекс (НК);
3. переносной носитель данных (ПНД);
4. универсальное устройство записи информации на ПНД (УЗ);
5. универсальный видеомонитор (ВМ);
6. комплект универсальных устройств управления (УУ);
7. электронный блок (ЭБ);
8. универсальную магистраль информационного обмена (УМИО);
9. ВЛФМ базы данных картографической информации (БДКИ);
10. ВЛФМ базы данных аэронавигационной информации (БДАНИ);
11. ВЛФМ интерактивного формирования маршрута полета ЛА (ФМП);
12. ВЛФМ формирования полетного задания (ФПЗ);
13. ВЛФМ записи полетного задания на ПНД (ЗПЗ);
14. канал информационного обмена (КИО);
15. устройство считывания информации с ПНД (УС);
16. комплект многофункциональных индикаторов (МФИ);
17. комплект навигационно-пилотажных систем (НПС);
18. бортовую радиотехническую систему связи (БРСС);
19. бортовую цифровую вычислительную систему (БЦВС);
20. бортовую магистраль информационного обмена (БМИО);
21. ВЛФМ объединенной базы данных (ОБД);
22. ВЛФМ формирования навигационно-пилотажных параметров (ФНПП);
23. ВЛФМ формирования отображаемой информации (ФОИ);
24. ВЛФМ формирования управляющих сигналов (ФУС);
25. ВЛФМ ввода-вывода и управления информационным обменом (ВВУИО);
26. ВЛФМ формирования графического образа пространственной траектории произвольной формы (ФГОТПФ);
27. ВЛФМ декомпозиции графического образа ТПФ (ДГОТПФ);
28. второй ВЛФМ декомпозиции графического образа ТПФ (ДГОТПФ2).
Пунктирные связи на чертеже между блоками 4-3-15 обозначают процедуру перемещения ПНД 3 из наземного УЗ 4 в бортовое УС 15 и обратно.
Логика функционирования предлагаемой системы в ее ограничительной части соответствует вышеприведенному описанию системы-прототипа.
Вновь введенные в состав системы блоки обеспечивают системе дополнительные свойства и функционируют следующим образом.
Оператор, при необходимости, на основе целевого задания на полет, с учетом динамических свойств ЛА и его систем автоматического управления, в процессе интерактивного взаимодействии, посредством УУ 6 и ВМ 5, с ВЛФМ ФГОТПФ 26 формирует графический образ ТПФ, соединяющей две "стандартные" навигационные точки из маршрута полета.
Эта процедура выполняется путем рисования ТПФ оператором на экране ВМ 5 с помощью УУ 6 на фоне электронной карты местности, выведенной на экран ВМ 5 из ВЛФМ БДКИ 9. В случаях построения траектории посадки или взлета, ее графический образ извлекается напрямую из ВЛФМ Б ДАНИ 10.
Сформированный графический образ ТПФ поступает в ВЛФМ ФПЗ 12, а затем в составе общего полетного задания через ЗПЗ 13 поступает в УЗ 4 и записывается в ПНД 3. После переноса ПНД 3 на борт ЛА графический образ ТПФ в составе общего полетного задания через УС 15, КИО 14, ВЛФМ ВВУИО 25 поступает в БД 21.
На борту ЛА, при необходимости осуществления полета по ТПФ, экипаж вызывает из ОБД 21 на МФИ 16 карту соответствующей местности, вызывает из ОБД 21 и накладывает на карту графический образ ТПФ, а затем в режиме интерактивного взаимодействия с ВЛФМ ДГОТПФ2 28 производит декомпозицию ТПФ на несколько ПМТ переменной длины. Координаты точек взаимного соединения ПМТ передаются через БМИО 20 в ОБД 21, где запоминаются для дальнейшего использования в качестве "стандартных" НТ.
В некоторых ситуациях, например на ЛА с одним членом экипажа, проведение процедуры декомпозиции графического образа ТПФ непосредственно на борту ЛА не всегда представляется возможным. Для этих случаев в предлагаемой системе предусмотрена возможность проведения процедуры декомпозиции графического образа ТПФ на ПМТ в составе СППЗ 1.
В составе СППЗ 1, при необходимости осуществления полета по ТПФ, оператор вызывает из ФПЗ 12 уже сформированное полетное задание, извлекает из него графический образ ТПФ, который накладывает на электронную карту соответствующей местности на ВМ 5, а затем в режиме интерактивного взаимодействия с ВЛФМ ДГОТПФ 27 производит декомпозицию ТПФ на несколько ПМТ переменной длины. Координаты точек взаимного соединения ПМТ передаются через УМИО 8 в ВЛФМ ФПЗ 12, где включаются в состав полетного задания в качестве "стандартных" НТ.
В простейшем случае декомпозиция графического образа ТПФ как в составе НК 2, так и в составе СППЗ 1, может быть произведена оператором соответственно на МФИ 16 или ВМ 5 путем выбора, с учетом соответствующих критериев, точек взаимосоединения ПМТ и "скалыванием" с изображения карты местности координат этих точек.
Таким образом, на примерах реализации показано достижение технических результатов.
Комплексная система подготовки, навигации и управления летательного аппарата, состоящая из наземной системы подготовки полетного задания (СППЗ) и бортового навигационного комплекса (НК), связь между которыми осуществляется посредством переносного носителя данных (ПНД), причем СППЗ состоит из универсального устройства записи информации на ПНД, универсального видеомонитора и комплекта универсальных устройств управления, соединенных входами-выходами с электронным блоком (ЭБ), включающим взаимосоединенные входами-выходами по универсальной магистрали информационного обмена (УМИО) вычислительно-логический функциональный модуль (ВЛФМ) базы данных картографической информации (БДКИ), ВЛФМ базы данных аэронавигационной информации (БДАНИ), ВЛФМ интерактивного формирования маршрута полета ЛА (ФМП), ВЛФМ формирования полетного задания и ВЛФМ записи полетного задания на ПНД, а НК состоит из взаимосоединенных входами-выходами по каналу информационного обмена (КИО) устройства считывания информации с ПНД, комплекта многофункциональных индикаторов, комплекта навигационно-пилотажных систем, радиотехнической системы связи и бортовой цифровой вычислительной системы (БЦВС), включающей взаимосоединенные входами-выходами по бортовой магистрали информационного обмена (БМИО) ВЛФМ объединенной базы данных (ОБД), ВЛФМ формирования навигационно-пилотажных параметров (ФНПП), ВЛФМ формирования отображаемой информации (ФОИ), ВЛФМ формирования управляющих сигналов (ФУС), ВЛФМ ввода-вывода и управления информационным обменом, отличающаяся тем, что она дополнительно снабжена введенным в состав ЭБ ВЛФМ формирования графического образа пространственной траектории произвольной формы (ТПФ) и ВЛФМ декомпозиции графического образа ТПФ, взаимосоединенными по УМИО с ВЛФМ БДКИ, ВЛФМ БДАНИ и ВЛФМ ФМП, а также введенным в состав БЦВС второго ВЛФМ декомпозиции графического образа ТПФ, взаимосоединенным по БМИО с ВЛФМ ОБД, ВЛФМ ФНПП, ВЛФМ ФОИ и ВЛФМ ФУС.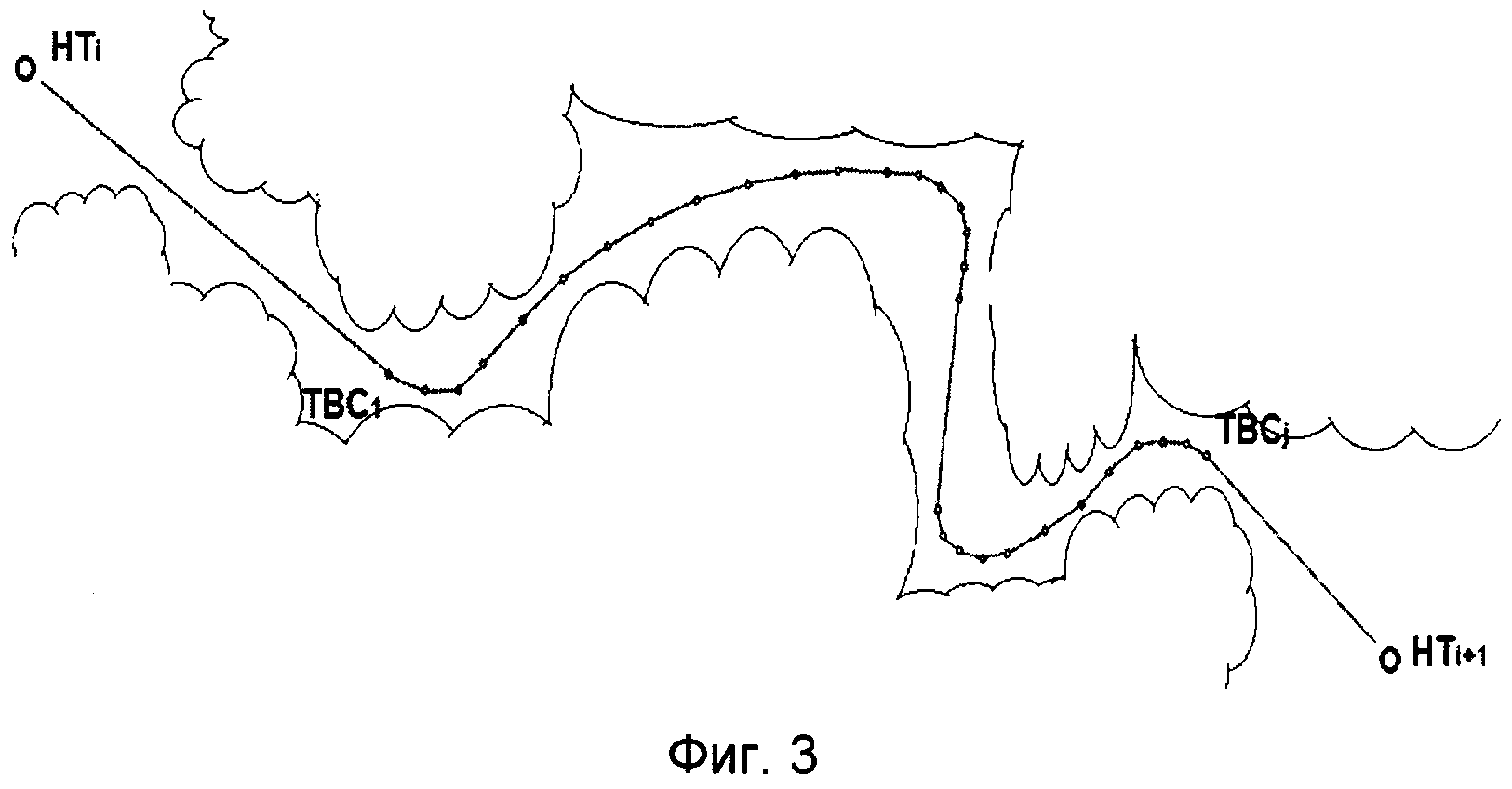
Комплексная система навигации и управления летательного аппарата
Способ определения скорости ветра на борту летательного аппарата и устройство, его реализующее
Способ управления летательным аппаратом при заходе на посадку
Комплексная система управления траекторией летательного аппарата при заходе на посадку
Способ подготовки инерциальной навигационной системы к полету
Способ управления траекторией летательного аппарата при посадке на незапрограммированный аэродром
Способ управления траекторией посадки летательного аппарата на запрограммированный аэродром
Способ управления траекторией летательного аппарата при заходе на посадку
Способ управления летательным аппаратом при заходе на навигационную точку с заданного направления
Комплексная навигационная система летательного аппарата
Комплексная система навигации и управления летательного аппарата
Способ определения скорости ветра на борту летательного аппарата и устройство, его реализующее
Способ управления летательным аппаратом при заходе на посадку
Комплексная система управления траекторией летательного аппарата при заходе на посадку
Способ подготовки инерциальной навигационной системы к полету
Способ управления траекторией летательного аппарата при посадке на незапрограммированный аэродром
Способ управления траекторией посадки летательного аппарата на запрограммированный аэродром
Способ управления траекторией летательного аппарата при заходе на посадку
Способ управления летательным аппаратом при заходе на навигационную точку с заданного направления
Комплексная навигационная система летательного аппарата

