Результат интеллектуальной деятельности: СПОСОБ АВТОМАТИЧЕСКОГО ОПРЕДЕЛЕНИЯ ГИДРОЛОКАТОРОМ КУРСОВОГО УГЛА ОБНАРУЖЕННОГО ОБЪЕКТА
Вид РИД
Изобретение
Настоящее изобретение относится к области гидроакустики и может быть использовано для измерения координат обнаруженного объекта с использованием гидролокатора ближнего действия.
Все современные гидролокаторы предназначены для измерения параметров движения обнаруженного объекта, к которым относится дистанция до объекта, скорость движения объекта и угловое положения объекта относительно направления движения гидролокатора, которое называется курсовым углом объекта. Курсовой угол объекта определяется относительно направления движения гидролокатора.
Известен способ определения курсового угла с помощью гидролокатора, описанный в книге А.С. Колчеданцева «Гидроакустические станции», Л., Судостроение, 1982 г., стр. 54, в котором приведена структурная схема гидролокатора, определяющего курсовой угол объекта. Гидролокатор содержит антенну, генератор, коммутатор, приемное устройство, индикатор. Антенна излучает зондирующий сигнал, принимает отраженный сигнал, автоматически поворачивается на фиксированный угол, снова излучает зондирующий сигнал, и таким образом обнаруживает эхосигнал от объекта. По углу положения объекта относительно движения гидролокатора определяется курсовой угол объекта. Недостатком этого гидролокатора является то, что при широких характеристиках направленности и большом угле поворота имеет место большая величина ошибки измерения курсового угла объекта.
Известны способы гидролокации, которые позволяют за один цикл излучения - приема вести наблюдение за объектами, находящимися в секторе 360°. Для этого формируется статический веер характеристик направленности. В этом случае направление на объект определяется не изменением положения антенны, а шириной характеристики направленности статического веера (там же, стр. 63), который выделяет оператор. Этот способ определения курсового угла объекта является наиболее близким аналогом и может быть принят за прототип. Способ, реализованный в гидролокаторе кругового обзора, содержит следующие операции: излучение зондирующего сигнала, прием эхосигнала, обнаружение объекта, измерение дистанции, измерение радиальной скорости объекта, измерение курсового угла объекта по номеру характеристики направленности, определенному оператором.
Недостатком данного способа является то, что измерение курсового угла объекта производится оператором по положению объекта, который фиксируется на индикаторе общей обстановки в яркостном виде и при протяженном объекте возникают ошибки в определении точного положения эхосигнала по виду отображения на яркостном индикаторе.
Задачей изобретения является обеспечение автоматического определения курсового угла на объект и уменьшения погрешности измерения.
Для решения поставленной задачи в способ, содержащий излучение зондирующего сигнала, прием эхосигнала от объекта статическим веером характеристик направленности, обнаружение эхосигнала, определение номера пространственного канала Ni, в котором обнаружен эхосигнал от объекта, введены новые признаки, а именно: измеряют уровень изотропной помехи после излучения зондирующего сигнала, определяют порог, измеряют времена обнаружения эхосигналов в каждом пространственном канале, в котором эхосигнал превышает выбранный порог, определяют максимальную амплитуду обнаруженного эхосигнала в каждом из этих каналов, сравнивают времена обнаружений этих амплитуд, и при совпадении времен определяют номера двух пространственных каналов, в которых совпадение произошло, и если эти пространственные каналы являются соседними, принимают решение, что принятый эхосигнал от одного объекта, а курсовой угол объекта определяют по формуле  , где Δβ0 - ширина характеристики направленности пространственного канала, Ni - номер характеристики направленности, в котором измерена максимальная амплитуда эхосигнала, Ai - значение максимальной амплитуды эхосигнала в канале Ni, Aj - значение максимальной амплитуды в соседнем пространственном канале Nj, где обнаружен эхосигнал в том же временном интервале, и курсовой угол увеличивается, если j<i, или уменьшается, если j>i.
, где Δβ0 - ширина характеристики направленности пространственного канала, Ni - номер характеристики направленности, в котором измерена максимальная амплитуда эхосигнала, Ai - значение максимальной амплитуды эхосигнала в канале Ni, Aj - значение максимальной амплитуды в соседнем пространственном канале Nj, где обнаружен эхосигнал в том же временном интервале, и курсовой угол увеличивается, если j<i, или уменьшается, если j>i.
Техническим результатом от использования предлагаемого способа является обеспечение автоматического измерения курсового угла объекта и уменьшение погрешности измерения за счет использования информации о пространственном положении объекта по одному эхосигналу в двух соседних пространственных каналах.
Существующие методы определения курсового угла обнаруженного объекта работают относительно направления движения гидролокатора. Относительно направления движения располагается приемная антенна, статические характеристики направленности которой ориентированы так, что по направлению движения расположена центральная характеристика направленности, относительно которой определяется курсовой угол обнаруженного объекта. Ширина характеристики направленности и определяет погрешность измерения курсового угла обнаруженного объекта. В зависимости от скорости перемещения объекта его положение может изменяться относительно направления движения гидролокатора и направления его движения. Объект может удаляться или приближаться и тогда его перемещение будет определяться радиальной составляющей скорости, а сам объект будет находиться в одной характеристике направленности. При тангенциальном перемещении объекта его радиальная скорость будет равна 0, и положение объекта будет фиксироваться в разных характеристиках направленности. Если ширина характеристики направленности составляет, например, 8°, то это и будет определять погрешность оценки курсового угла объекта. Как правило, измерение курсового угла производится оператором при наведении визира на обнаруженном на индикаторе эхосигнале от объекта. Поскольку яркостная отметка на индикаторе, из-за протяженности объекта, будет расплывчатая, то и курсовой угол объекта будет определен с ошибкой. Поэтому предлагается использовать для точного измерения курсового угла обнаруженного объекта соотношения между амплитудами эхосигнала, принятыми соседними характеристиками направленности. Поскольку характеристики направленности пересекаются на уровне 0,7 от максимума, то эхосигнал будет всегда обнаруживаться в двух характеристиках направленности с наибольшими амплитудами. Амплитуды эхосигналов будут определяться положением объекта относительно этих характеристик. Если в одной характеристике эхосигнал обнаруживается на максимуме характеристики, то амплитуда эхосигнала будет максимальной, а в соседней характеристике амплитуда эхосигнала будет меньше. Если положение объекта будет находиться на пересечении двух характеристик направленности на уровне 0,7, то амплитуды эхосигналов будут равны Ai=Aj и тогда курсовой угол будет равен  . Таким образом, по соотношению амплитуд можно автоматически оценивать курсовой угла обнаруженного объекта внутри характеристики направленности и тем самым повысить точность измерения курсового угла по одной посылке, что оператор никогда выполнить эту операцию не сможет. Для этого необходимо автоматически обнаружить эхосигнала в характеристиках направленности, измерить их амплитуды и по их соотношению рассчитать точное положение объекта внутри выбранной характеристики направленности.
. Таким образом, по соотношению амплитуд можно автоматически оценивать курсовой угла обнаруженного объекта внутри характеристики направленности и тем самым повысить точность измерения курсового угла по одной посылке, что оператор никогда выполнить эту операцию не сможет. Для этого необходимо автоматически обнаружить эхосигнала в характеристиках направленности, измерить их амплитуды и по их соотношению рассчитать точное положение объекта внутри выбранной характеристики направленности.
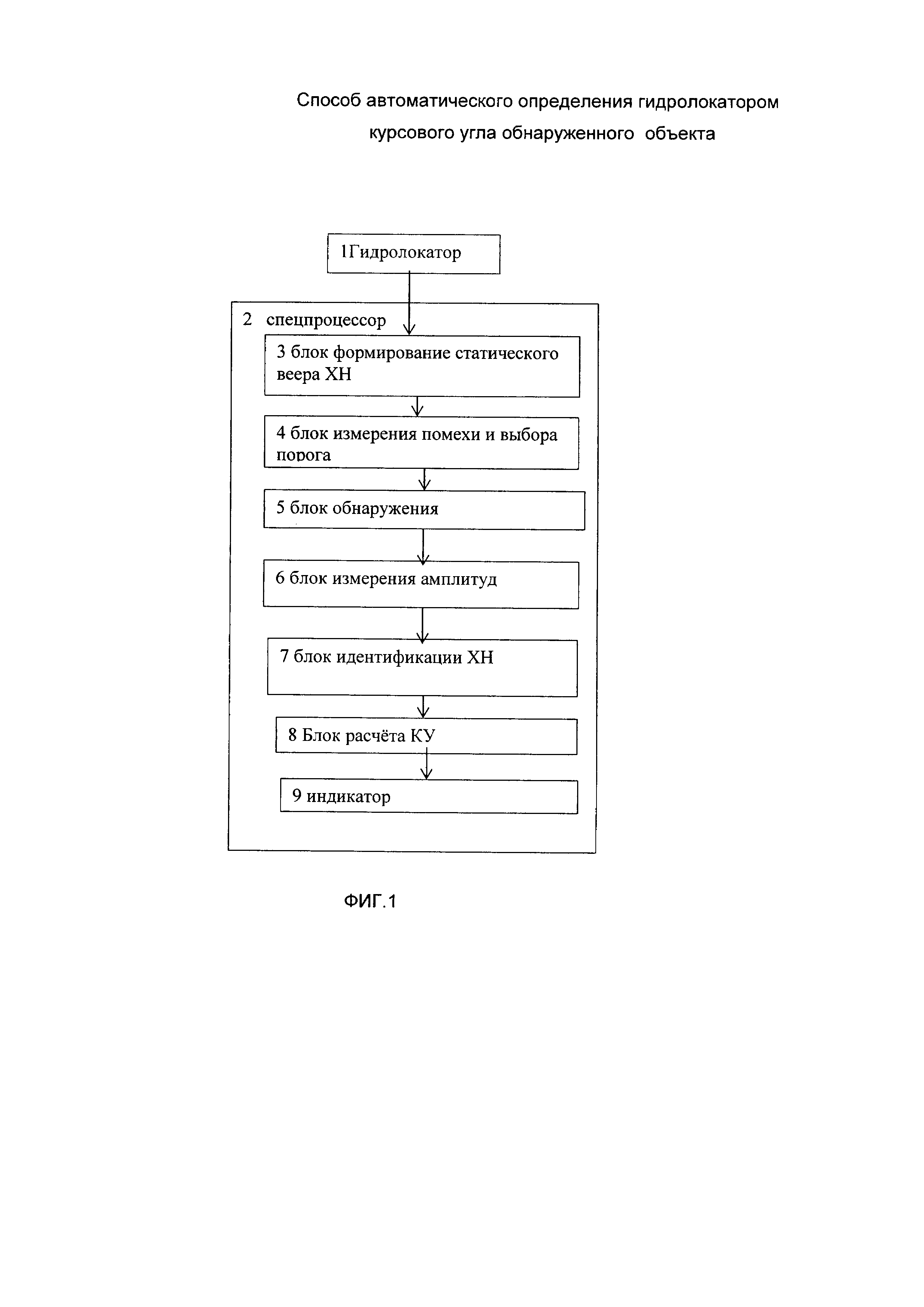
Сущность изобретения поясняется фиг. 1, на которой представлена блок-схема, реализующая предлагаемый способ.
Гидролокатор 1 содержит спецпроцессор 2, в состав которого входят последовательно соединенные блок 3 формирования статического веера характеристик направленности, блок 4 измерения помехи и выбора порога, блок 5 обнаружения, блок 6 измерения амплитуд, блок 7 идентификация характеристик направленности, блок 8 расчета курсового угла, блок 9 индикатор.
Реализацию способа целесообразно рассмотреть на примере работы устройства (фиг. 1). Гидролокатор 1 излучает зондирующие сигналы, принимает эхосигналы и передает их в спецпроцессор 2. Гидролокатор является известным устройством, которое используется для обнаружения эхосигналов от объектов с использования методов активной гидролокации (А.С. Колчеданцев «Гидроакустические станции», Л., Судостроение, 1982 г., стр. 54). Для качественного решения задач обработки гидроакустической информации в современных корабельных гидроакустических средствах (станциях) используются спецпроцессоры на основе ЦВС, обладающие высокой производительностью, функциональной надежностью и малыми габаритами. С использованием специального алгоритмического и программного обеспечения спецпроцессорами могут решаться все задачи формирования и обработки принимаемых гидроакустических сигналов, в том числе формирования статического веера характеристик направленности, измерения помехи, автоматическое обнаружение эхосигналов, измерения их параметров и автоматическое определения курсового угла обнаруженного объекта (Ю.А. Корякин, С.А. Смирнов, Г.В. Яковлев «Корабельная гидроакустическая техника», СПб, изд. «Наука», 2004 г. Стр. 281).
С выхода блока 3 сигнал поступает на блок 4 для измерения помехи и выбора порога и на блок 5 для автоматического обнаружения эхосигналов. В блоке 5 производится автоматическое обнаружение эхосигналов в характеристиках направленности, в блоке 6 - измерение их амплитуды А, номеров пространственных каналов N и времен обнаружения. Поскольку эхосигнал от одного объекта, то время обнаружения эхосигналов в соседних характеристиках направленности будет одинаково. По этим параметрам в блоке 7 производится идентификация по каналам и выбор тех двух соседних каналов, в которых произошло обнаружение в одно и то же время. Измеренные амплитуды и номера каналов передаются в блок 9 расчета курсового угла обнаруженного объекта по формуле . Это значение передается в блок 9 для отображения.
Таким образом, предложенная процедура автоматического измерения амплитуд эхосигналов, обнаруженных в одно и то же время в соседних пространственных каналах, позволяет более точно автоматически определить курсовой угол обнаруженного объекта по одному эхосигналу.
Способ автоматического определения гидролокатором курсового угла обнаруженного объекта, содержащий излучение зондирующего сигнала, прием эхосигнала статическим веером характеристик направленности, обнаружение эхосигнала, измерение направления на объект по определению номера пространственных каналов N, отличающийся тем, что измеряют уровень изотропной помехи после излучения зондирующего сигнала, определяют порог, измеряют времена обнаружения эхосигналов в каждом пространственном канале по превышению выбранного порога, определяют максимальную амплитуду обнаруженного эхосигнала A в каждом канале, сравнивают времена обнаружений этих амплитуд и при совпадении времен определяют номера пространственных каналов, в которых совпадение произошло, и если эти пространственные каналы являются соседними, принимают решение, что принятый эхосигнал от одного объекта, а курсовой угол объекта определяют по формуле , где Δβ - ширина характеристики направленности пространственного канала, N - номер характеристики направленности, в котором измерена максимальная амплитуда эхосигнала, A - значение максимальной амплитуды эхосигнала в канале N, A - значение максимальной амплитуды в соседнем пространственном канале N, где обнаружен эхосигнал в том же временном интервале, и курсовой угол увеличивается, если j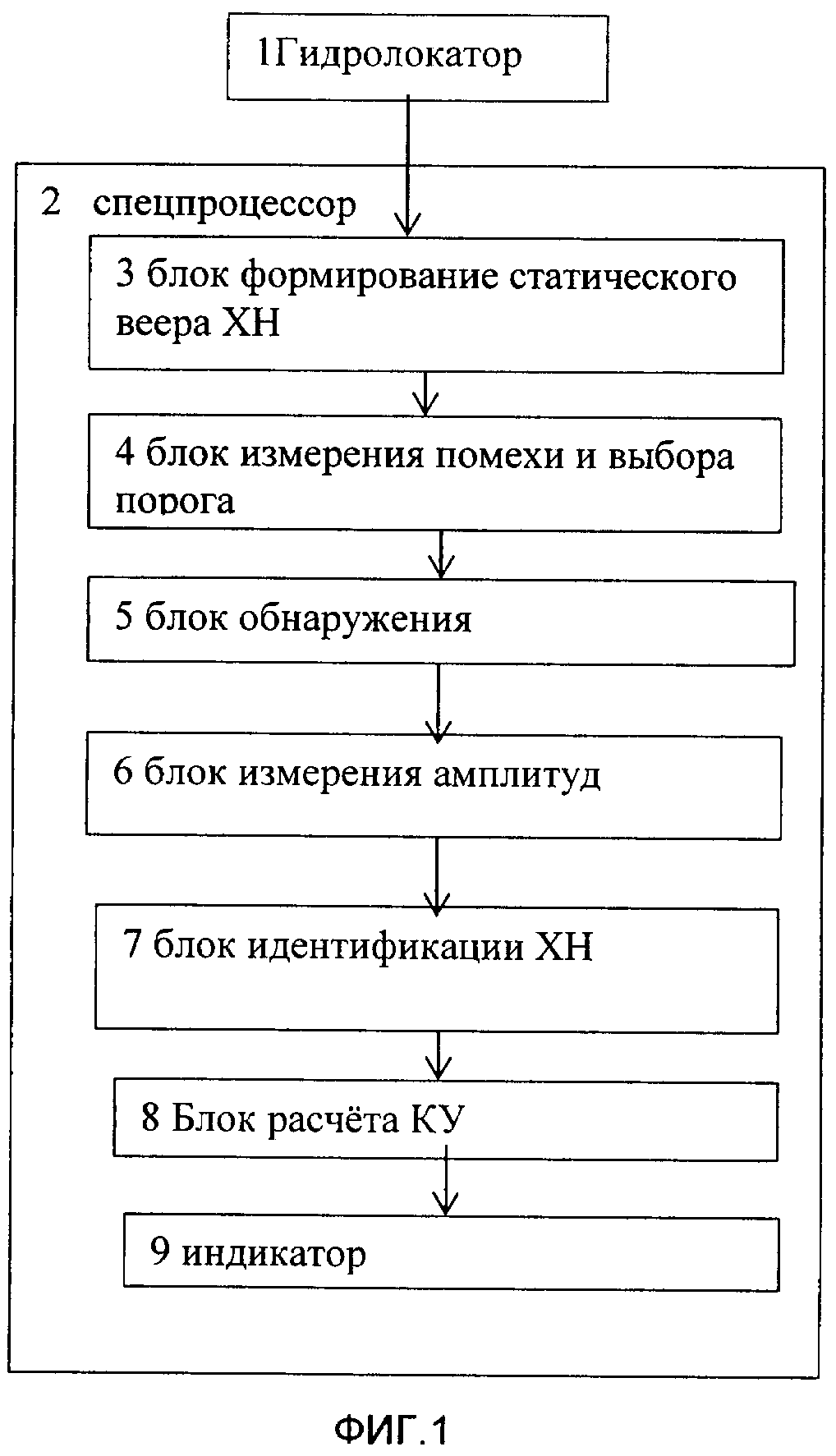

Способ измерения гидролокатором параметров вытекающего газа из трубы подводного газопровода
Способ определения маневра шумящего объекта
Способ обнаружения локального объекта на фоне распределенной помехи
Генераторное устройство для возбуждения ультразвуковых излучателей
Способ измерения гидролокатором параметров вытекающего газа из трубы подводного газопровода
Способ определения маневра шумящего объекта
Способ обнаружения локального объекта на фоне распределенной помехи
Генераторное устройство для возбуждения ультразвуковых излучателей
Гидроакустический способ управления торпедой
Гидролокационный способ классификации подводных объектов в контролируемой акватории
Способ определения параметров цели гидролокатором
Способ определения скорости звука гидролокатором по трассе распространения сигнала до цели
Активный гидролокатор
Способ обработки гидролокационной информации

