Результат интеллектуальной деятельности: СПОСОБ ИЗМЕРЕНИЯ КОМПОНЕНТОВ СЛОЖНЫХ ПЕРЕМЕЩЕНИЙ ОБЪЕКТА
Вид РИД
Изобретение
Изобретение относится к измерительной технике и может быть использовано, например, для измерения с помощью оптического приемника изображения линейных и угловых перемещений, в машиностроении, станкостроении, автомобилестроении и робототехнике.
Известен способ измерения компонентов сложных перемещений, реализованный в устройстве измерения углового положения и перемещения объекта, заключающййся в использовании связанного с контролируемым объектом распределенного в пространстве тестового объекта, выполненного в виде кодового лимба со штрихами, и формирования изображения штрихов в плоскости приемника изображения, по которым судят о перемещениях контролируемого объекта (пат. 2120105 РФ, МПК6 G01B 11/00, G01B 11/26, G01B 21/00, G01B 21/22. Преобразователь угловых перемещений / А.В. Балай, В.И Беляев, Е.Р. Маламед, Ю.Н. Петров. - Заявл. 11.06.96; Опубл. 10.10.98).
Недостатком известного способа является недостаточная точность из-за большого расстояния между штрихами, нанесенными на тестовый объект, ограниченные функциональные возможности из-за сложности и громоздкости тестового объекта, низкая информативность из-за отсутствия измерения линейного перемещения объекта.
Известен способ измерения компонентов сложных перемещений, реализованный в фотоэлектрическом измерительном устройстве, заключающийся в использовании тестового объекта в виде штриховой миры, сканатора, диафрагмы генератора опорных сигналов в виде двух разнесенных на известное базовое расстояние щелевых отверстий и снабжении анализатора изображения дополнительной ветвью измерения третьей линейной координаты и угловых перемещений (пат. 2057286 РФ, МПК6 G01B 11/00. Фотоэлектрический измеритель перемещений / В.Я. Колючкин, Г.М. Мосягин, В.Н. Рязанов. - Заявл. 14.07.93; Опубл. 27.03.96).
Недостатком известного способа является недостаточная точность из-за большого расстояния между штрихами, сложность и громоздкость реализации, приводящие к ограничениям в практических применениях.
Известен способ измерения перемещений, реализованный в измерителе угловых перемещений, заключающийся в использовании тест-объекта с периодической структурой и характерной маркой, оптической системы и анализатора координат изображения с другой периодической структурой, образованной расположением фотоприемных областей, оптически связанных так, что линейные координаты изображения тест-объекта в анализаторе зависят от углового положения хотя бы одного из компонентов оптической системы, связанного с контролируемым объектом (пат. 2116618 РФ, МПК6 G01B 11/26, G01C 1/00. Измеритель углов (варианты) / А.В. Голицын. - Заявл. 02.06.94; Опубл. 27.07.98).
Недостатком известного способа является недостаточная информативность и ограниченные функциональные возможности из-за отсутствия измерения линейного перемещения контролируемого объекта, недостаточная точность из-за большого расстояния между элементами периодических структур, нанесенных на тестовый объект и фотоприемную область, сложности и громоздкости реализации.
Наиболее близким по технической сущности к заявленному является способ измерения компонентов сложных перемещений объекта, осуществляемый с помощью оптической системы и заключающийся в использовании связанного с контролируемым объектом распределенного в пространстве видимого тестового объекта, в качестве которого используют отрезок прямой известной длины L, формировании изображения последнего в приемнике изображения, где создается шкала в виде виртуальных меток, фиксируемых в начальный такт измерения на поверхности приемника изображения в определенных заранее точках изображения тестового объекта, по перемещениям изображения относительно которых судят о перемещениях контролируемого объекта (пат. 2315948 РФ, МПК G01B 11/00. Способ измерения компонентов сложных перемещений объекта / В.Н. Нестеров, А.В. Мещанов, В.М. Мухин. - Заявл. 26.04.2006; Опубл. 27.01.2008. Бюл. №3).
Недостатком известного способа является низкая информативность и точность измерения компонентов сложных перемещений контролируемого объекта из-за неселективности известного способа к компонентам перемещения, характеризующим поворот и приближение-удаление объекта, а также ограниченные функциональные возможности способа из-за невозможности его применения в технических приложениях, требующих определения большего количества информативных компонентов перемещений контролируемых объектов, например в специальных системах ближней локации, 3D-стендах определения компонентов развала-схождения элементов ходовой части автомобилей, в системах калибровки универсальных промышленных роботов и т.д.
Техническим результатом изобретения является повышение точности и информативности измерения за счет обеспечения селективности способа измерения к компонентам перемещения, характеризующим поворот и приближение-удаление объекта относительно соответствующих координатных осей, в том числе обеспечения измерения дополнительной компоненты, характеризующей линейное перемещения объекта в направлении удаления-приближения (в направлении оси OZ) относительно видеокамеры, при одновременном измерении компоненты, характеризующей линейное перемещения объекта в направлении другой координатной оси (в направлении оси OX), ориентированной в плоскости, параллельной плоскости чувствительной поверхности видеокамеры, и компоненты перемещения объекта, характеризующей поворот его вокруг третьей оси декартовой системы координат (вокруг оси OY), а также расширение функциональных возможностей способа за счет обеспечения его применимости в большем числе технических приложений.
Сущность изобретения заключается в том, что в известном способе измерения компонентов сложных перемещений объекта, осуществляемом с помощью оптической системы и заключающемся в использовании связанного с контролируемым объектом распределенного в пространстве видимого тестового объекта, в качестве которого используют отрезок прямой известной длины L, формировании изображения последнего в приемнике изображения, где создается шкала в виде виртуальных меток, фиксируемых в начальный такт измерения на поверхности приемника изображения в определенных заранее точках изображения тестового объекта, и по перемещениям изображения относительно которых судят о перемещениях контролируемого объекта, по п. 1 формулы используют дополнительный трехмерный тестовый объект в виде шара известного диаметра D, который жестко совмещают с тестовым объектом, выполненным в виде отрезка прямой известной длины L, таким образом, что отрезок пересекает центр шара, а геометрические параметры отрезка и шара выбирают из условия L>D, и по четырем расстояниям от соответствующих виртуальных меток до выбранных точек изображения многомерного тестового объекта, складывающихся из изображений известных элементов отрезка L и (или) изображений известных элементов, например, радиуса или диаметра D, тестового объекта, выполненного в виде шара, и (или) изображений информативных компонентов, характеризующих сложное перемещение контролируемого объекта, определяют информативные компоненты перемещений контролируемого объекта, характеризующие его линейные перемещения вдоль осей OX и OZ и поворот вокруг оси OY декартовой системы координат в последующие такты измерения.
В реализации по п. 2 формулы изобретения одну виртуальную метку фиксируют на поверхности приемника изображения в точке, совпадающей в начальный такт измерения с одной из крайних точек изображения элемента тестового объекта, выполненного в виде отрезка прямой известной длины L, вторую виртуальную метку фиксируют в начальный такт измерения на поверхности приемника изображения в точке пересечения изображения поверхности элемента тестового объекта, выполненного в виде шара известного диаметра D, и элемента тестового объекта, выполненного в виде отрезка прямой известной длины L, ближайшей к первой метке, в последующие такты измеряют значения расстояний от первой виртуальной метки до изображения ближайшей к ней крайней точки отрезка прямой известной длины L, от первой виртуальной метки до точки пересечения изображения поверхности шара известного диаметра D и изображения отрезка прямой известной длины L, от первой виртуальной метки до изображения центра поверхности шара известного диаметра D, от второй виртуальной метки до изображения ближайшей к ней крайней точки отрезка прямой известной длины L, а значения компонентов, характеризующих линейные перемещения контролируемого объекта вдоль осей OX и OZ и поворот его вокруг оси OY декартовой системы координат, определяют по формулам:
 ;
;
 ;
;
 ,
,
где Y1(τ) - величина расстояния от первой виртуальной метки до изображения ближайшей к ней крайней точки отрезка прямой известной длины L; Y2(τ) - величина расстояния от первой виртуальной метки до точки пересечения изображения поверхности шара известного диаметра D и изображения отрезка прямой известной длины L; Y3(τ) - величина расстояния от первой виртуальной метки до изображения центра поверхности шара известного диаметра D; Y4(τ) - величина расстояния от второй виртуальной метки до изображения ближайшей к ней крайней точки отрезка прямой известной длины L; L - известная длина отрезка прямой тестового объекта; D - известный диаметр шара тестового объекта.
В реализации по п. 3 формулы изобретения одну виртуальную метку фиксируют на поверхности приемника изображения в точке, совпадающей в начальный такт измерения с одной из крайних точек изображения элемента тестового объекта, выполненного в виде отрезка прямой известной длины L, вторую виртуальную метку фиксируют на поверхности приемника изображения в точке, совпадающей в начальный такт измерения с центром поверхности элемента тестового объекта, выполненного в виде шара известного диаметра D, в последующие такты измеряют значения расстояний от первой виртуальной метки до изображения ближайшей к ней крайней точки отрезка прямой известной длины L, от первой виртуальной метки до точки пересечения изображения поверхности шара известного диаметра D и изображения отрезка прямой известной длины L, от первой виртуальной метки до изображения центра поверхности шара известного диаметра D, от второй виртуальной метки до изображения геометрического центра шара известного диаметра D, а значения компонентов, характеризующих линейные перемещения контролируемого объекта вдоль осей OX и OZ и поворот его вокруг оси OY декартовой системы координат, определяют по формулам:
 ;
;
 ;
;
 ,
,
где Y1(τ) - величина расстояния от первой виртуальной метки до изображения ближайшей к ней крайней точки отрезка прямой известной длины L; Y2(τ) - величина расстояния от первой виртуальной метки до точки пересечения изображения поверхности шара известного диаметра D и изображения отрезка прямой известной длины L; Y3(τ) - величина расстояния от первой виртуальной метки до изображения центра поверхности шара известного диаметра D; Y4(τ) - величина расстояния от второй виртуальной метки до изображения геометрического центра шара известного диаметра D; L - известная длина отрезка прямой тестового объекта; D - известный диаметр шара тестового объекта.
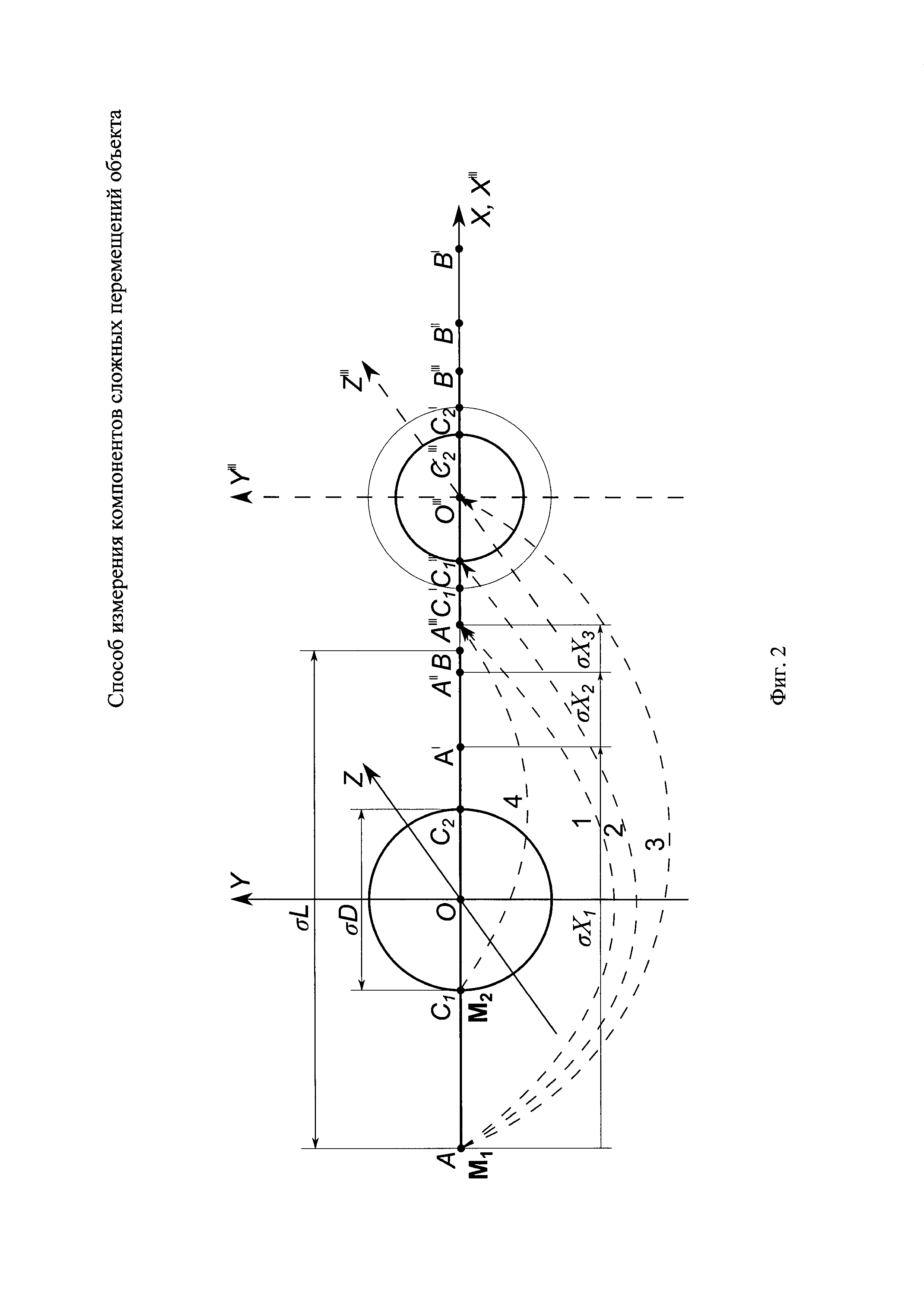
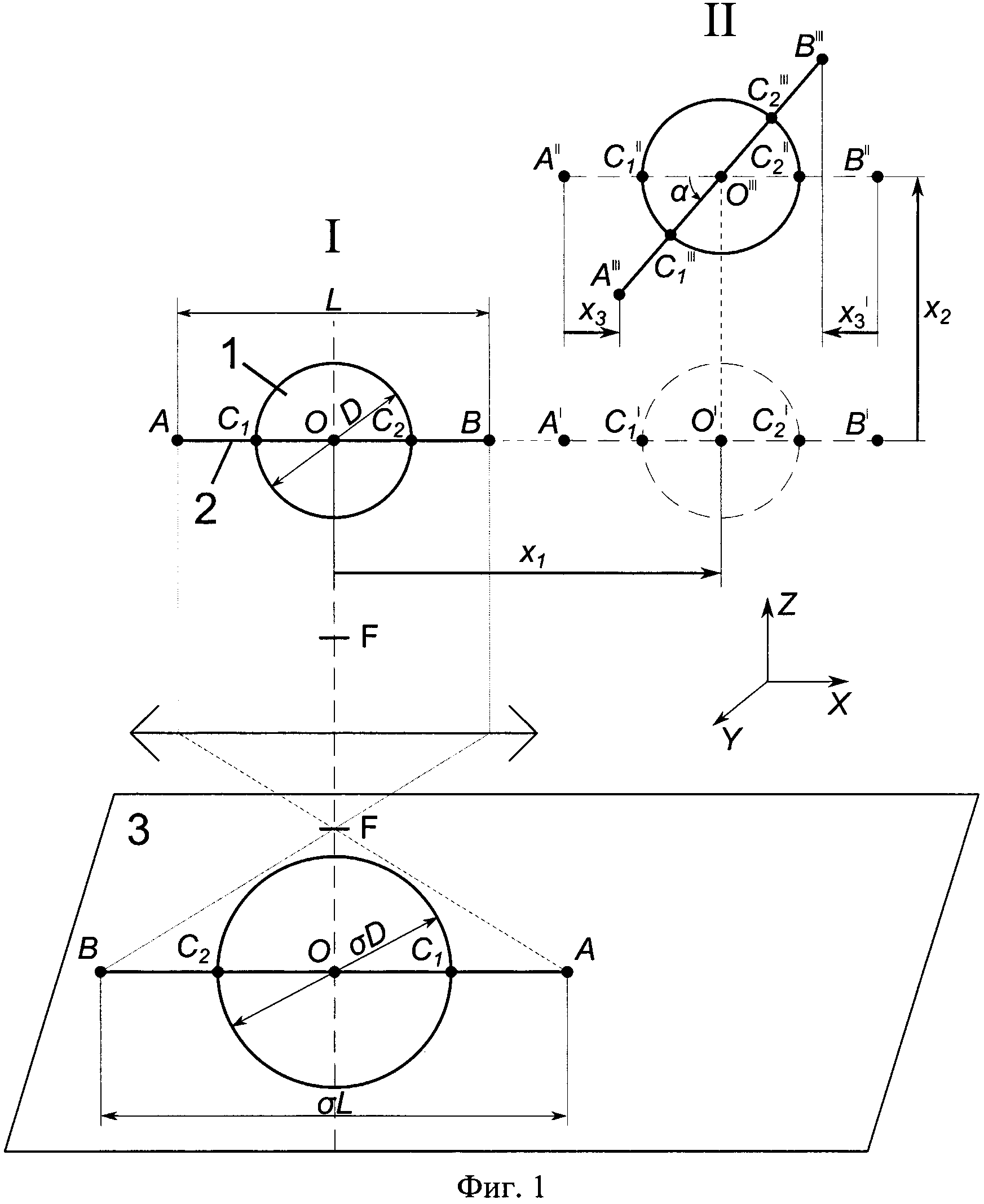
Сущность изобретения поясняется чертежами, где на фиг. 1 показана графическая модель тестового объекта в двух положениях и его проекция в одном из положений на плоскость приемника изображения, на фиг. 2 - вариант графической модели изображений информативных компонентов перемещения выбранных точек тестового объекта относительно меток М1 и М2 в соответствии с пп. 1 и 2 формулы изобретения, на фиг. 3 - вариант графической модели изображений компонентов перемещения выбранных точек тестового объекта относительно меток M1 и М2 в соответствии с пп. 1 и 3 формулы изобретения.
Основными элементами устройства, необходимыми для реализации способа, являются трехмерный тестовый объект, один элемент которого выполнен в виде шара известного диаметра D и жестко совмещен с другим элементом, выполненным в виде отрезка прямой известной длины L, как показано на фиг. 1, и оптический приемник изображения (унифицированная видеокамера или цифровой фотоаппарат, сопряженных с устройством обработки цифровых изображений, в качестве которого можно использовать персональный компьютер).
Способ измерения компонентов сложных перемещений объекта реализуется следующим образом. Тестовый объект (фиг. 1), один элемент которого выполнен в виде шара 1 известного диаметра D и жестко совмещен с другим элементом, выполненным в виде отрезка 2 прямой известной длины L, перемещается в пространстве, непосредственно являясь контролируемым объектом или вместе с контролируемым объектом, с которым имеет жесткую связь (на фиг. 1 не показано). При этом, как показано на фиг. 1, в первый такт измерения он занимает положение I, а в следующий такт измерения положение II, куда он переместился из положения I. Центр тестового объекта находится в точке О. На фиг. 1 показаны компоненты перемещения: X1 - вектор поступательного перемещения тестового объекта в направлении оси X (на фиг. 1 - проекция на ось X перемещения центра тестового объекта из точки О в точку O'); X2 - вектор поступательного перемещения тестового объекта в направлении оси Z (на фиг. 1 - проекция на ось Z перемещения центра тестового объекта из точки O' в точку Oʺ'); X3 и  - векторы, характеризующие поворот тестового объекта вокруг оси Y присоединенной к нему системы координат на угол α из положения
- векторы, характеризующие поворот тестового объекта вокруг оси Y присоединенной к нему системы координат на угол α из положения  в положение
в положение  , которые получены путем декомпозиции сложного перемещения тестового объекта на элементарные информативные составляющие. В данном случае вследствие симметрии тестового объекта относительно точки O можно считать, что
, которые получены путем декомпозиции сложного перемещения тестового объекта на элементарные информативные составляющие. В данном случае вследствие симметрии тестового объекта относительно точки O можно считать, что  , а получение формулы вычисления угла α поворота тестового объекта вокруг оси Y присоединенной к объекту системы координат по известному параметру AB=L и одному из векторов
, а получение формулы вычисления угла α поворота тестового объекта вокруг оси Y присоединенной к объекту системы координат по известному параметру AB=L и одному из векторов  носит тривиальный характер и здесь не приводится. Не приводится также алгоритм перехода от определяемой информативной компоненты X2(τ) к вектору X2, так как он не составляет предмет изобретения и может быть получен путем тривиальных тригонометрических и алгебраических преобразований. Оптический приемник изображения установлен таким образом, что на его чувствительную поверхность 3, компланарную плоскости OXY, проецируется изображение тестового объекта, в данном случае BC2OC1A. В следующий такт измерения проецируется изображение тестового объекта в новом положении, например в положении II (на фиг. 1 не показано). Для удобства по примеру зрения человека на фиг. 2 и фиг. 3 показаны дважды инвертированные изображения тестового объекта в первый и второй такты измерения. Коэффициент σ является коэффициентом передачи оптического канала, а величины σX1, σX2, σX3 получены по изображениям перемещений выбранных точек изображения тестового объекта, которые характеризуют, соответственно, линейные перемещения контролируемого объекта вдоль осей OX и OZ и поворот его вокруг оси OY декартовой системы координат.
носит тривиальный характер и здесь не приводится. Не приводится также алгоритм перехода от определяемой информативной компоненты X2(τ) к вектору X2, так как он не составляет предмет изобретения и может быть получен путем тривиальных тригонометрических и алгебраических преобразований. Оптический приемник изображения установлен таким образом, что на его чувствительную поверхность 3, компланарную плоскости OXY, проецируется изображение тестового объекта, в данном случае BC2OC1A. В следующий такт измерения проецируется изображение тестового объекта в новом положении, например в положении II (на фиг. 1 не показано). Для удобства по примеру зрения человека на фиг. 2 и фиг. 3 показаны дважды инвертированные изображения тестового объекта в первый и второй такты измерения. Коэффициент σ является коэффициентом передачи оптического канала, а величины σX1, σX2, σX3 получены по изображениям перемещений выбранных точек изображения тестового объекта, которые характеризуют, соответственно, линейные перемещения контролируемого объекта вдоль осей OX и OZ и поворот его вокруг оси OY декартовой системы координат.
В соответствии с заявленным способом в начальный, первый, такт измерения на изображении тестового объекта в определенных его точках, например в точке A, являющейся крайней точкой изображения тестового объекта, и в точке C1, являющейся точкой пересечения изображения поверхности элемента тестового объекта, выполненного в виде шара известного диаметра D, и элемента тестового объекта, выполненного в виде отрезка AB прямой известной длины L, как показано на фиг. 2, или в точках A и O, первая из которых является крайней точкой изображения тестового объекта, а вторая - центром изображения тестового объекта, как показано на фиг. 3, формируют виртуальные метки M1 и М2. Виртуальные метки M1 и М2 в соответствии с п. 1 формулы изобретения могут быть зафиксированы и в других определенных заранее точках изображения тестового объекта в начальный такт измерения.
Расстояния от выбранных виртуальных меток M1 и М2 до соответствующих точек изображения тестового объекта во второй такт измерения в общем виде представляются выражениями, составляющими систему уравнений:
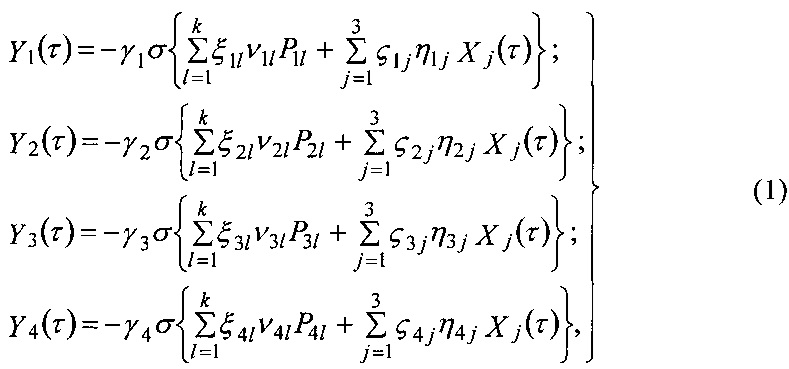
где количество уравнений определяется числом неизвестных, в данном случае их четыре: X1(τ), X2(τ), X3(τ) - информативные компоненты, характеризующие, соответственно, поступательное перемещение тестового объекта в направлении оси X, поступательное перемещение тестового объекта в направлении оси Z, поворот тестового объекта вокруг оси Y присоединенной к нему системы координат на угол α из положения в положение , и σ - неизвестный коэффициент передачи оптического канала;
τ - промежуток времени между тактами измерения;
νil∈[0,1] - весовые коэффициенты, отражающие отсутствие - 0 - или наличие - (0,1] - соответствующего параметра Pil многокомпонентного тестового объекта;
ηij∈[0,1] - весовые коэффициенты, отражающие отсутствие - 0 - или наличие - (0,1] - соответствующей информативной компоненты Xj(τ);
коэффициенты γi, ξil, ζij принимают значения в соответствии с соглашениями:
Количество уравнений в (1) определяется количеством подлежащих определению информативных компонентов плюс еще одно, что обусловлено наличием неизвестного коэффициента σ передачи оптического канала
Положения меток M1, M2 и контролируемых точек изображений тестового объекта (см. фиг. 2 и фиг. 3) выбираются таким образом, чтобы функциональный определитель для системы уравнений (1) не был равен нулю:

Тогда из системы уравнений (1) определяют искомые информативные компоненты X1(τ), X2(τ), X3(τ).
В частности, в соответствие вариантом по п. 2 расстояния во второй такт измерения от меток M1 и M2, зафиксированных на плоскости приемника изображения в первый такт измерения в точках, соответственно, А и C1, как показано на фиг. 2, до точек Aʺ',  и Oʺ' определяются выражениями:
и Oʺ' определяются выражениями:
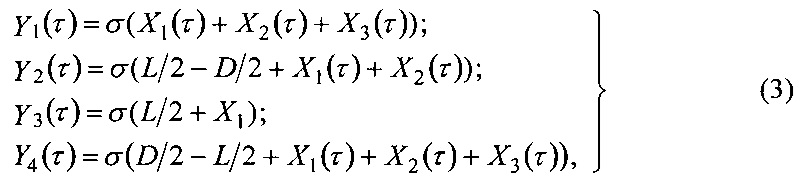
Тогда из системы уравнений (3) определяют информативные компоненты X1(τ), X2(τ), X3(τ), характеризующие, соответственно, поступательное перемещение тестового объекта в направлении оси X, поступательное перемещение тестового объекта в направлении оси Z, поворот тестового объекта вокруг оси Y присоединенной к нему системы координат на угол α из положения в положение , в соответствие с выражениями:
; (4)
; (5)
. (6)
В соответствии с вариантом по п. 3 расстояния во второй такт измерения от меток M1 и M2, зафиксированных на плоскости приемника изображения в первый такт измерения в точках, соответственно, A и O, как показано на фиг. 3, до точек, соответственно, Aʺ', и Oʺ' определяются выражениями:
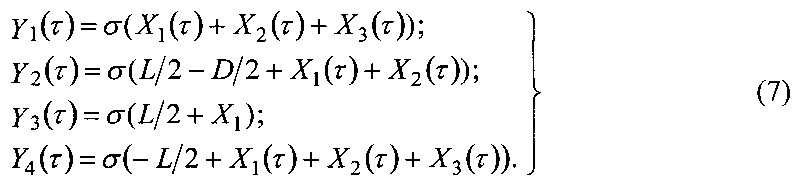
Из системы уравнений (7) определяют информативные компоненты X1(τ), X2(τ), X3(τ), характеризующие, соответственно, поступательное перемещение тестового объекта в направлении оси X, поступательное перемещение тестового объекта в направлении оси Z, поворот тестового объекта вокруг оси Y присоединенной к нему системы координат на угол а из положения в положение , в соответствие с выражениями:
; (8)
; (9)
. (10)
Технический результат предложенного способа, обеспечивающий его преимущества по сравнению с известными аналогами и прототипом, заключается в существенном расширении функциональных возможностей за счет его применимости в большем числе технических приложений. Это обеспечивается большей информативностью и точностью измерения, которые обусловлены селективностью способа к компонентам перемещения, характеризующим поворот и приближение-удаление объекта относительно соответствующих координатных осей, в том числе обеспечения измерения дополнительной компоненты, характеризующей линейное перемещение объекта в направлении удаления-приближения относительно видеокамеры, при одновременном измерении компоненты, характеризующей линейное перемещение объекта в направлении другой координатной оси, ориентированной в плоскости, параллельной плоскости чувствительной поверхности видеокамеры, и компоненты перемещения объекта, характеризующей поворот его вокруг третьей оси декартовой системы координат. При этом не усложняется аппаратная реализация способа, которая, как и в прототипе, состоит из унифицированного цифрового фотоаппарата или цифровой видеокамеры, сопрягаемых с устройством обработки цифровых изображений, в качестве которого можно использовать персональный компьютер. Заявленное техническое решение также позволяет повысить точность измерения за счет применения в качестве приемника изображения современных фотоприемных матриц с высокой разрешающей способностью и отсутствия каких-либо механических элементов, требующих дополнительной юстировки.





Координатный стол
Стенд для контроля точности контурных перемещений промышленного робота
Аппарат для дмв-терапии
Координатный стол
Стенд для контроля точности контурных перемещений промышленного робота
Аппарат для дмв-терапии

