Результат интеллектуальной деятельности: КООРДИНАТНЫЙ СТОЛ
Вид РИД
Изобретение
Изобретение относится к машиностроению, а именно к двухкоординатным устройствам на линейных электродвигателях с программным управлением, и может быть использовано в прецизионных станках и других высокоточных координатных устройствах.
Известен координатный стол, который может быть использован в прецизионных станках [1, 2], который содержит основание и параллельные направляющие, закрепленные вдоль противоположных сторон основания, портал, установленный с возможностью реверсивного перемещения по направляющим, головку с рабочим органом, установленную с возможностью реверсивного перемещения вдоль портала, средства перемещения портала и головки с рабочим органом, которые выполнены в виде линейных электродвигателей, и программный блок управления. В конструкции основания использованы опорные бруски из гранита, базальта или подобных горных пород, а индукторы линейных электродвигателей снабжены трехсторонними аэростатическими опорами.
К недостаткам известных технических решений следует отнести громоздкость и сложность, которые обусловлены использованием в конструкции элементов из горных пород и трехсторонних аэростатических опор. Кроме того, координатное устройство с аэростатическими опорами не обладает высокой грузоподъемность, необходимую во многих станках с механической обработкой сложных и крупных деталей, а портальная конструкция может привести к возникновению погрешностей позиционирования вследствие упругих и температурных деформаций портала в процессе работы станка, в том числе при изменении температурных условий. Портал и направляющие с линейным электродвигателем, расположенные в рабочем пространстве, ограничивают технологические возможности координатного стола и усложняют его наладку и эксплуатацию.
Известен крестовой стол [3], содержащий модули продольного и поперечного перемещения, каждый из которых выполнен в виде основания с направляющими, каретки, размещенной на направляющих, и привода каретки, выполненного в виде линейного электродвигателя и индуктором и якорем, где индуктор каждого из модулей скреплен с соответствующим основанием, якорь - с кареткой, а индуктор линейного электродвигателя каждого из модулей расположен между направляющими соответствующего модуля, причем каретки модулей продольного и поперечного перемещения скреплены между собой.
Недостатком данного крестового стола является недостаточная грузоподъемность и, соответственно, точность позиционирования обрабатываемых на столе изделий из-за влияния на опоры разнонаправленных динамических нагрузок, приводящих к нормальным и тангенциальным смещениям в опорах. Кроме того, т.к. каретки модулей продольного и поперечного перемещения скреплены между собой, электромагнитные катушки якоря, скрепленного с кареткой верхнего модуля, необходимо устанавливать вдоль всего пути движения индуктора, что усложняет и удорожает конструкцию.
Наиболее близким по технической сущности к заявленному является координатный стол [4], содержащий модули продольного и поперечного перемещения, каждый из которых выполнен в виде основания с линейными шариковыми направляющими, каретки, размещенной на направляющих, и привода каретки, выполненного в виде линейного синхронного электродвигателя, содержащего якорь с электромагнитными модулями и индуктор, выполненный в виде магнитной дороги из постоянных магнитов, где индуктор каждого из модулей скреплен с соответствующим основанием, якорь - с кареткой, а индуктор линейного электродвигателя каждого из модулей расположен между направляющими соответствующего модуля.
Несмотря на то что по сравнению с аналогами данный координатный стол обладает более широкими функциональными возможностями, более технологичен в исполнении и повышает долговечность работы, он имеет следующие недостатки:
- недостаточную грузоподъемность и жесткость конструкции из-за использования шариковых опор в направляющих;
- недостаточную точность позиционирования стола при значительных динамических нагрузках в поперечных по отношению к линейным шариковым направляющим направлениях.
Техническим результатом изобретения являются увеличение грузоподъемности и надежности изделия, а также повышение точности позиционирования стола в условиях повышенных динамических нагрузок.
Сущность изобретения заключается в том, что в известном координатном столе, содержащем модули продольного и поперечного перемещения, каждый из которых выполнен в виде основания с направляющими, каретки, размещенной на направляющих, и привода каретки, выполненного в виде линейного синхронного электродвигателя, содержащего якорь с электромагнитными модулями и индуктор, выполненный в виде магнитной дороги из постоянных магнитов, где индуктор каждого из модулей скреплен с соответствующим основанием, якорь - с кареткой, а индуктор линейного электродвигателя каждого из модулей расположен между направляющими соответствующего модуля, направляющие каретки одного или обоих модулей выполнены в виде роликовых дорожек, ориентированных в направлениях свободного перемещения модулей, где направляющие качения и ролики роликовых дорожек развернуты под углом к горизонтальным поверхностям кареток зеркально по отношению друг к другу, а в качестве линейного синхронного двигателя применен двигатель, в котором использованы две вертикально установленные магнитные дороги, а якорь с электромагнитными модулями выполнен из двух жестко связанных вертикально установленных и направленных к магнитным дорогам блоков. Кроме того, углы установки роликовых дорожек по отношению к горизонтальным поверхностям кареток равны и находятся в диапазоне от 135° до 175°. Диапазон выбран исходя из следующего. Если углы принимают значение 135°, то обеспечивается баланс реакций опор на вертикально и горизонтально направленные нагрузки со стороны подвижных конструкций координатного стола. Увеличивая углы до значения 175°, увеличиваем тем самым значения реакций опор на вертикальные нагрузки, что необходимо для обеспечения более высокой грузоподъемности. Углы большие, чем 175°, не играют существенной роли по сравнению с прототипом. Таким образом, большие значения углов необходимы для больших значений веса установленных на координатном столе изделий. А меньшие значения углов предпочтительны для столов с высокими значениями динамических нагрузок. Конкретные оптимальные значения могут быть выявлены экспериментально.
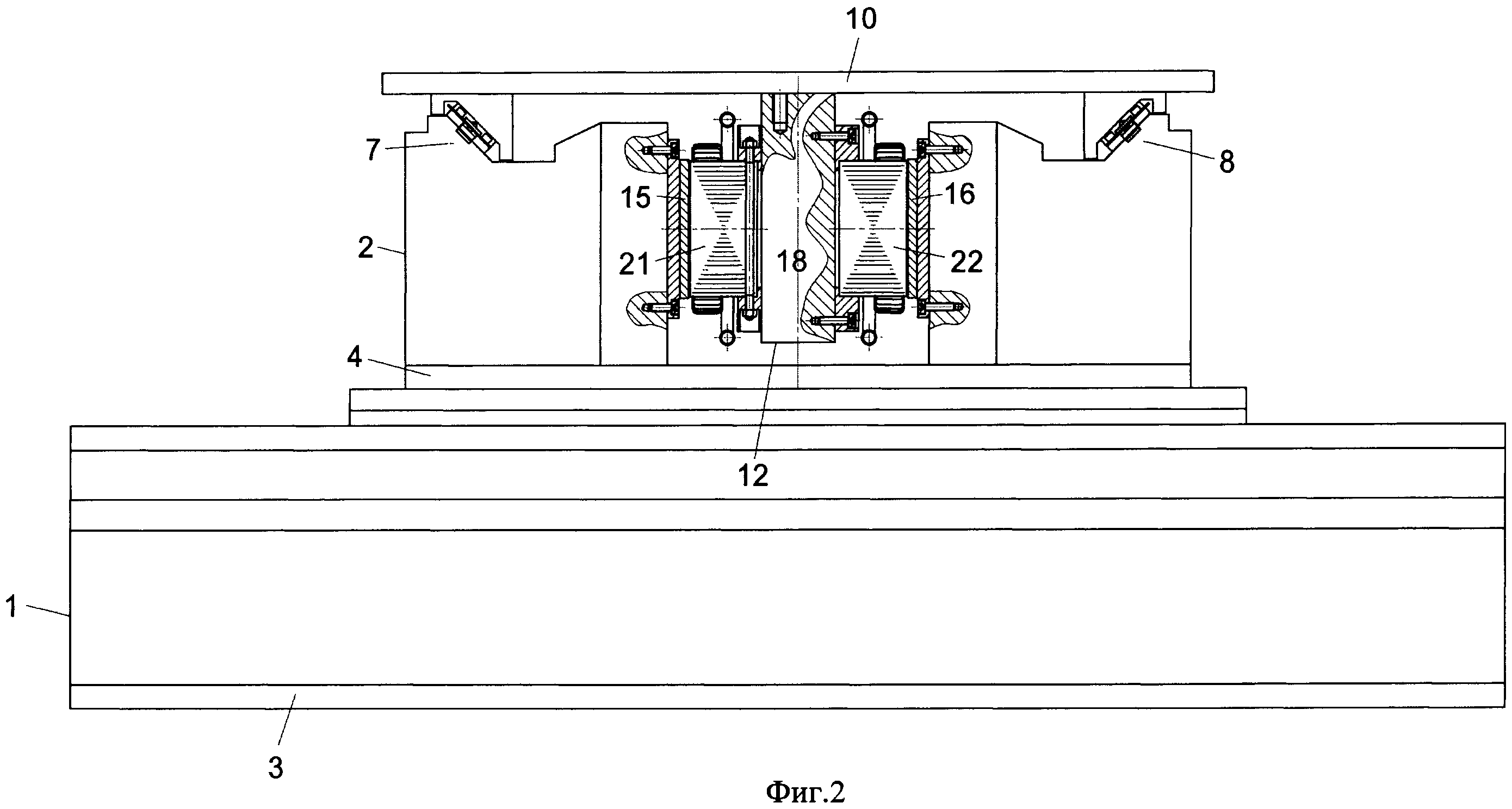
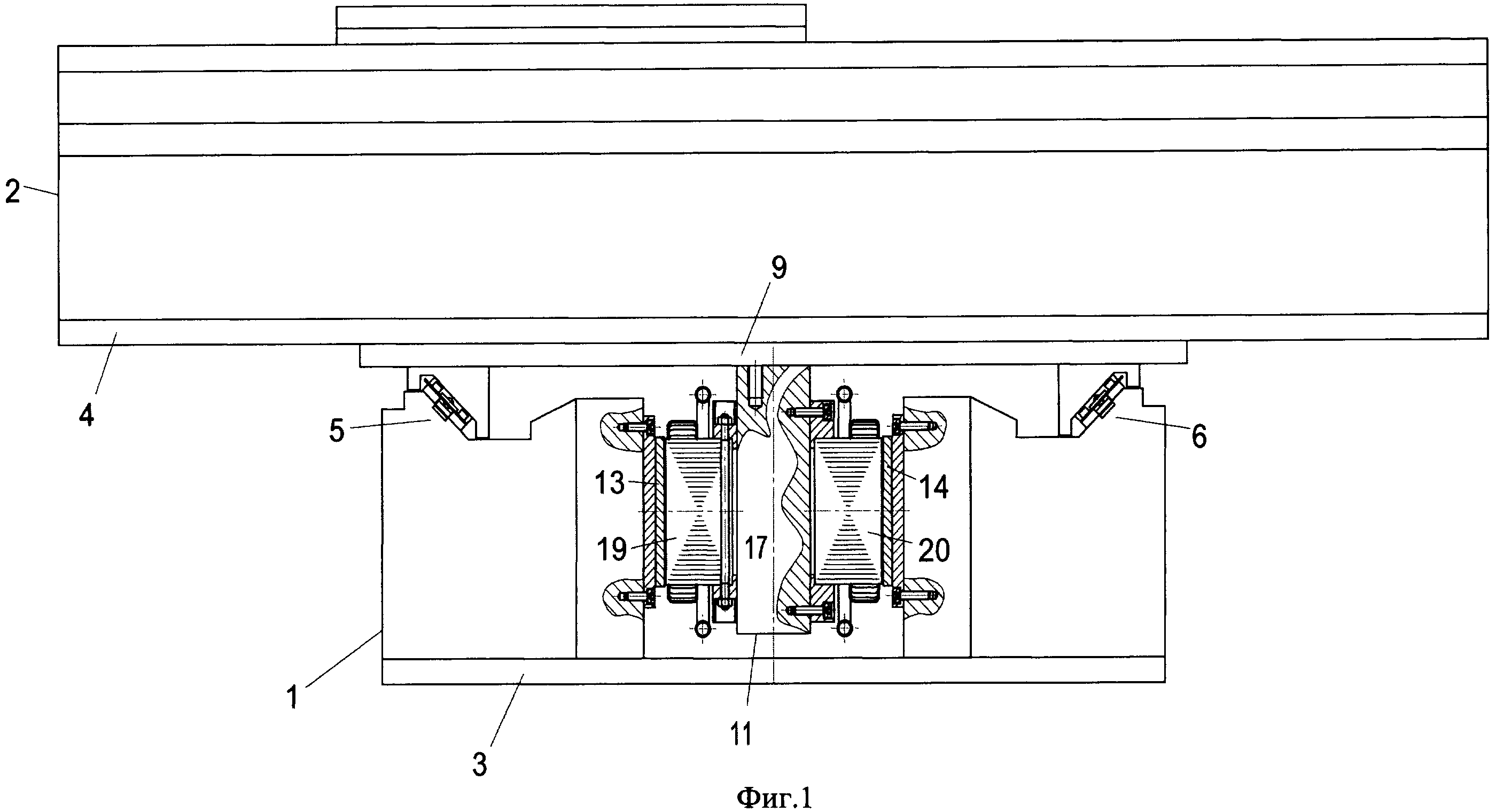
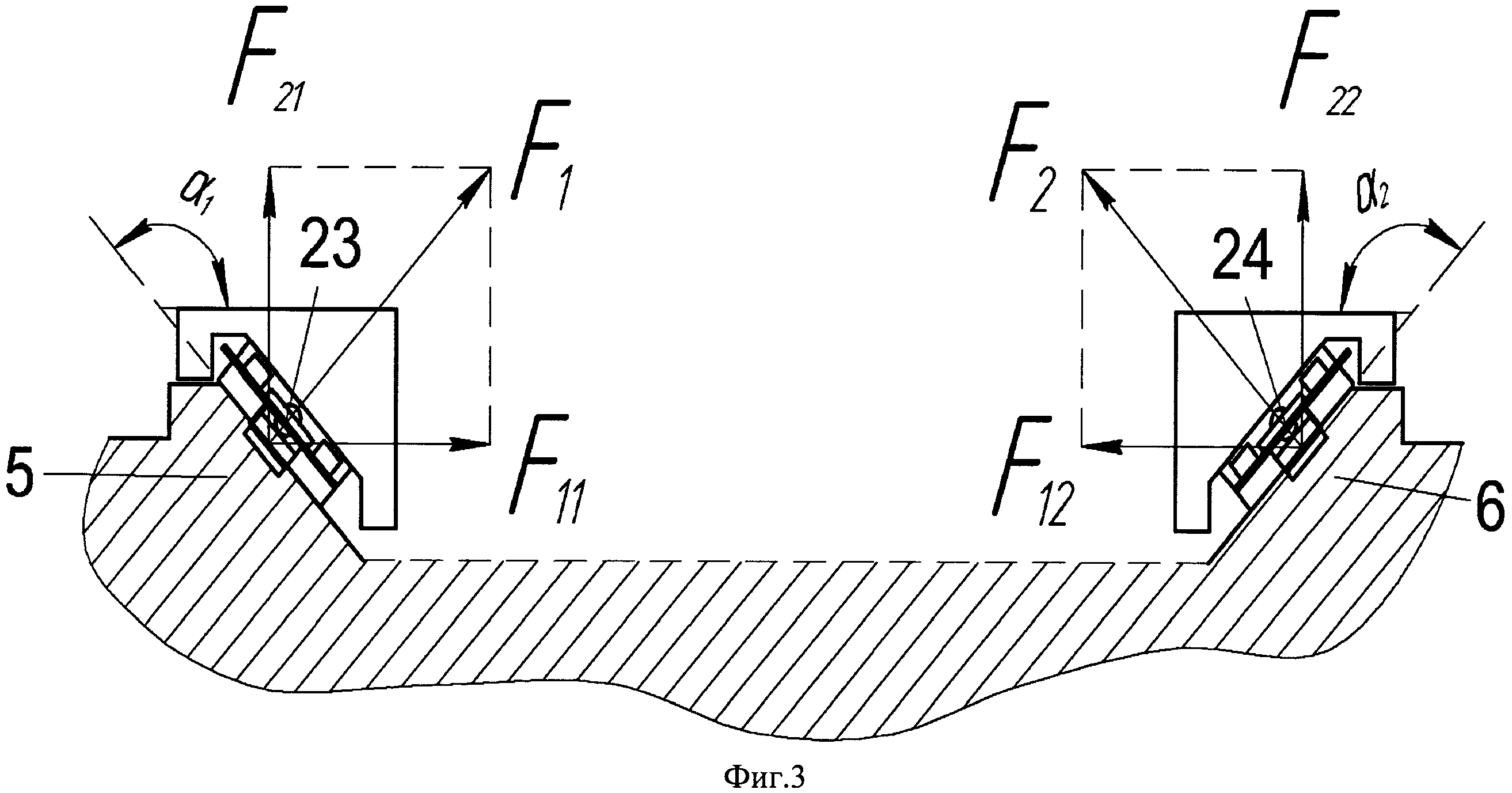
Сущность изобретения поясняется чертежами, где на фиг.1 показан координатный стол с разрезом модуля продольного перемещения, на фиг.2 - координатный стол с разрезом модуля поперечного перемещения, а на фиг.3 - поперечный разрез линейных роликовых направляющих с векторными диаграммами сил реакции пор.
Координатный стол, содержит модули 1 и 2 продольного и поперечного перемещения (см. фиг.1 и 2). Каждый из модулей 1 и 2 содержит основания 3 и 4, соответственно, с двумя роликовыми направляющими 5 и 6, 7 и 8 каждый, каретки 9 и 10, соответственно, размещенных на направляющих 5 и 6, 7 и 8 модулей 1 и 2, соответственно. Приводы кареток 9 и 10 выполнены в виде линейных синхронных электродвигателей 11 и 12, в которых в индукторах использованы по две вертикально установленные магнитные дороги 13 и 14, 15 и 16, а якоря 17 и 18 с электромагнитными модулями выполнены из двух жестко связанных вертикально установленных и направленных к магнитным дорогам 13 и 14, 15 и 16 блоков 19 и 20, 21 и 22, соответственно. Магнитные дороги 13 и 14, 15 и 16 индукторов каждого из линейных электродвигателей 11 и 12 скреплены с соответствующими основаниями 3 и 4 модулей 1 и 2. Якоря 17 и 18 скреплены, соответственно, с каретками 9 и 10, а индукторы линейных электродвигателей 11 и 12 каждого из модулей 1 и 2 расположены между направляющими 5 и 6, 7 и 8 соответствующих модулей. Направляющие 5 и 6, 7 и 8 кареток 9 и 10 выполнены в виде роликовых дорожек, ориентированных в направлениях свободного перемещения модулей, где направляющие качения и ролики 23 и 24 роликовых дорожек развернуты под углом к горизонтальным поверхностям кареток зеркально по отношению друг к другу (см. фиг.3). Причем что углы α1 и α2 установки роликовых дорожек по отношению к горизонтальным поверхностям кареток равны и находятся в диапазоне от 135° до 175°. Система кабель-каналов, датчики контроля линейных перемещений линейных электродвигателей и программный блок управления линейными электродвигателями на рисунках не показаны.
Координатный стол работает следующим образом.
По сигналу программного блока управления (на рисунках не показан) одновременно и согласованно запитываются обмотки управления блоков 19, 20 и 21, 22 якорей 17 и 18, соответственно, линейных электродвигателей 11 и 12. При этом электрические токи, протекая по обмоткам управления блоков 19, 29 и 21, 22, создают магнитные потоки, которые замыкаются через магнитопроводы статора и ротора, соответственно продольного и поперечного модулей координатного стола (фиг.1 и 2). Эти магнитные потоки, взаимодействуя, соответственно, с потоками возбуждения постоянных магнитов магнитных дорог 13 и 14, 15 и 16, электродвигателей 11 и 12, создают тяговые усилия блоков 19 и 20, 21 и 22, передаваемые от якорей 17 и 18 на каретки 9 и 10 продольного 1 и поперечного 2 модулей координатного стола. Под воздействием соответствующего тягового усилия каретка 9, с которой скреплено основание 4 модуля 2 поперечного перемещения, по роликовым направляющим 5 и 6 перемещается в продольном направлении. Соответственно, в продольном направлении перемещается весь модуль 2 поперечного перемещения. Под воздействием соответствующего тягового усилия каретка 10 модуля 2 поперечного перемещения, по роликовым направляющим 7 и 8 перемещается в поперечном направлении. Верхняя поверхность каретки 10 модуля 2 поперечного перемещения является рабочей поверхностью, на которую устанавливается плита (на рисунках не показана) координатного стола для крепления обрабатываемого изделия.
Вследствие тяжести обрабатываемого изделия (на рисунках не показано), рабочей плиты и непосредственно подвижных частей модулей 1 и 2 координатного стола, воздействия на обрабатываемое изделие со стороны инструмента, а также высоких скоростей перемещения подвижных частей линейных электродвигателей возникают большие инерционные и иные силы, направленные в продольных направлениях по отношению к направляющим 5 и 6, 7 и 8 модулей 1 и 2 продольного и поперечного перемещения соответственно.
Поскольку направляющие кареток 9 и 10 модулей 1 и 2 выполнены в виде роликовых дорожек 5 и 6, 7 и 8, это повышает грузоподъемность, жесткость и надежность модулей в целом. Так как направляющие качения и ролики 23 и 24, например, роликовых дорожек 5 и 6 модуля 1 установлены под углами α1 и α2 к горизонтальной поверхности каретки (фиг.3), то силы F1 и F2 реакции опор, направленные по нормалям к поверхностям направляющих качения, разлагаются на горизонтально F11 и F12 и вертикально F21 и F22 направленные составляющие. Горизонтально направленные составляющие F11 и F12 направлены встречно и компенсируют возмущающие воздействия на направляющие 5 и 6 и ролики 23 и 24 со стороны подвижных частей конструкции, возникающие вследствие воздействия сил инерции и воздействия сил, приложенных со стороны инструмента к обрабатываемому изделию. В результате увеличивается жесткость конструкции и повышается точность позиционирования координатного стола. Аналогично происходит компенсация возмущающих воздействий на направляющие 7 и 8 в модуле 2 продольного перемещения. Однако ориентация направляющих под углами α1 и α2 к горизонтали приводит к уменьшению вертикальных составляющих F21 и F22 сил реакций опор, например, для модуля 1 (фиг.3), уменьшая тем самым грузоподъемность конструкции в целом. Следует учитывать большие силы притяжения между катушками якоря и постоянными магнитами линейных электродвигателей, которые в техническом решении прототипа и аналогов направлены встречно силам F21 и F22, и без того уменьшенных за счет составляющих F11 и F12. Так как в конструкции использованы две вертикально установленные магнитные дороги 13 и 14, например, в модуле 1 продольного перемещения, то силы притяжения между ними и блоками 19 и 20 с обмотками якоря 17 компенсируются за счет жесткого крепления блоков 19 и 20 на якорь 17, направлены перпендикулярно составляющим сил F21 и F22, не приводя к дополнительным нагрузкам на ролики 23 и 24. В то же время, вследствие симметрии конструкции силы притяжения между магнитными дорогами 13, 14 и блоками 19 и 20, соответственно, направленные встречно, увеличивают стабильность положения каретки 9 модуля при отклонениях ее в продольных направлениях по отношению к направлению направляющих 5 и 6. Аналогично происходит компенсация возмущающих сил в модуле 2 продольного перемещения координатного стола.
Углы α1 и α2 установки роликовых дорожек по отношению к горизонтальным поверхностям кареток равны и находятся в диапазоне от 135° до 175°, а конкретные их значения определяются экспериментально для каждой конкретной конструкции в зависимости от грузоподъемности и других конструктивных и эксплуатационных параметров.
Таким образом, технический результат координатного стола, обеспечивающий его преимущества по сравнению с известными аналогами и прототипом, выражается в увеличении грузоподъемности, надежности изделия, повышении точности и стабильности позиционирования каждого модуля и координатного стола в целом в условиях повышенных динамических нагрузок.
Источники информации
1. Пат. 2133184 С1, РФ, МПК В23Q 1/01, В43L 13/02, H02К 19/06. Координатный стол, портал координатного стола и способ изготовления индуктора многофазного линейного электродвигателя / А.П.Чаталбашев. - Заявл. 08.04.1998; Опубл. 20.07.1999.
2. Пат. 2173625 С1, РФ, МПК В23Q 1/25, В23К 37/02. Координатное устройство / М.И.Горбуленко, В.В.Коряк, Е.Б.Кульбацкий, С.Е.Поденок - Заявл. 21.12.2000; Опубл. 20.09.2001.
3. Пат. 86517 U1, РФ, МПК В23Q 1/00. Крестовый стол / Л.Г.Сапрыкин, О.А.Рокачевский. - Заявл. 03.06.2009; Опубл. 10.09.2009, Бюл. №25.
4. Пат. 2244617 С1, РФ, МПК В23Q 1/00. Координатный стол (варианты) / А.Н.Коруков, Н.О.Наумов - Заявл. 17.06.2003; Опубл. 20.01.2005, Бюл.№2.
Катализатор для получения сверхвысокомолекулярного полиэтилена
Способ получения хлопчатобумажной ткани технического назначения с комплексом защитных свойств от кислот и нефтепродуктов
Стенд для контроля точности контурных перемещений промышленного робота
Эпоксиполиэфирная лакокрасочная композиция
Способ сбора штормовых выбросов морских водорослей
Устройство для преобразования изменения сопротивления в напряжение
Устройство для защиты емкостного накопителя энергии
Катализатор, способ его приготовления и способ получения β-пиколина
Катализатор, способ его приготовления и способ получения малосернистого дизельного топлива
Силовой тиристор
Катализатор для получения сверхвысокомолекулярного полиэтилена
Способ получения хлопчатобумажной ткани технического назначения с комплексом защитных свойств от кислот и нефтепродуктов
Стенд для контроля точности контурных перемещений промышленного робота
Эпоксиполиэфирная лакокрасочная композиция
Способ сбора штормовых выбросов морских водорослей
Фотохромная регистрирующая среда для трехмерной оптической памяти
Устройство для преобразования изменения сопротивления в напряжение
Устройство для защиты емкостного накопителя энергии
Катализатор, способ его приготовления и способ получения β-пиколина
Катализатор, способ его приготовления и способ получения малосернистого дизельного топлива

