Результат интеллектуальной деятельности: Трехзвенное кинематическое соединение с тремя относительными движениями
Вид РИД
Изобретение
Изобретение относится к области машиностроения и может использоваться для соединения звеньев механизмов и деталей машин.
Известно, что любая механическая система (механизм, машина) состоит из звеньев и соединений звеньев [1]. Простейшим (по числу звеньев) соединением, допускающим относительное движение звеньев, является кинематическая пара. К настоящему времени теория кинематических пар является достаточно разработанной, известно большое многообразие пар, воспроизводящих различные виды относительных движений. Однако, несмотря на это, только некоторые пары широко используются в технике. Это во многом связано со сложностью изготовления кинематических пар (соединений). Конструктивно пара может быть упрощена путем введения в ее состав дополнительного, третьего звена. Такое соединение является трехзвенным кинематическим соединением (трексом) [2].
Известна двухподвижная цилиндрическая кинематическая пара [1, стр. 57, рис. 95], образованная связью цилиндр-желоб. Такая пара имеет комплекс относительных движений ВП - вращательное и поступательное движения относительно одной общей оси координат. Недостатком цилиндрической пары является невозможность воспроизведения дополнительного вращательного движения относительно любой из двух оставшихся свободных осей координат.
Наиболее близким к заявляемому устройству является трехзвенное кинематическое соединение (треке) с шестью относительными движениями [3], принимаемое за прототип. Соединение включает в свой состав входное, промежуточное и выходное звенья. При этом выходное звено выполнено в виде прямого кругового цилиндра. Входное и промежуточное звенья образуют плоскостную кинематическую пару (параллелепипед на плоскости), выходное и промежуточное звенья соединяются посредством четырехподвижной пары (цилиндр на плоскости), входное и выходное звенья организуют пятиподвижную точечную кинематическую пару. При этом подвижность соединения прототипа равна шести (W=6).
Недостаток прототипа заключается в слишком большом числе его относительных движений. На практике в наибольшей степени применимыми являются одно-, двух- и трехподвижные соединения (кинематические пары). Соединения, обеспечивающие большее число относительных движений, используются в конструкциях механизмов и машин крайне редко.
Недостатком прототипа также является ограниченная область его применения в силу использования в нем одноподвижной точечной кинематической пары. Прототип может быть использован исключительно в кинематических цепях нулевого семейства [1, стр. 85], содержащих в своем составе одноподвижные пары. В цепях иных семейств использование прототипа невозможно.
Задачей изобретения является уменьшение числа относительных движений прототипа и расширение области его применения путем использования в его составе исключительно одно- и двухподвижных кинематических пар.
Сущность заявляемого устройства заключается в том, что предлагается трехзвенное кинематическое соединение с тремя относительными движениями, включающее входное, промежуточное и выходное звенья, где выходным звеном является прямой круговой цилиндр, при этом входное и промежуточное звенья образуют вращательную кинематическую пару, а выходное и промежуточное звенья входят в двухподвижную цилиндрическую кинематическую пару, при этом промежуточное звено выполнено в виде цилиндрического закрытого желоба.
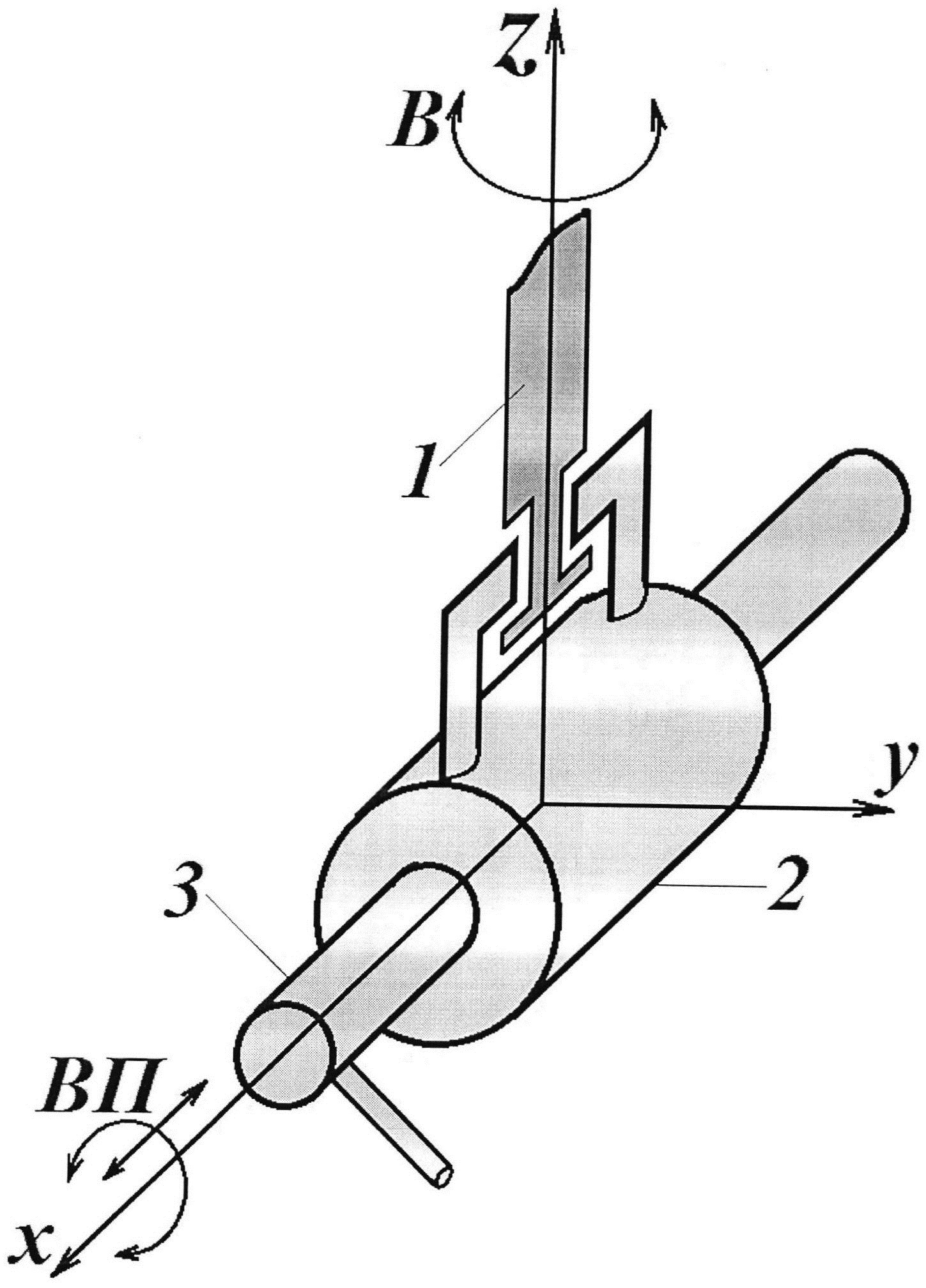
На фиг. показано трехзвенное кинематическое соединение с тремя относительными движениями. Соединение включает в свой состав три звена - входное звено 1; промежуточное звено 2, выполненное в виде прямого кругового цилиндрического закрытого желоба; выходное звено 3, выполненное в виде прямого кругового цилиндра.
Промежуточное звено 2 образует с входным звеном 1 вращательную кинематическую пару пятого класса (р5), а с выходным звеном 3 - двухподвижную цилиндрическую кинематическую пару (р4).
Относительное движение звеньев может быть рассмотрено в декартовой системе координат xyz. Вокруг оси z звену 2 относительно звена 1 обеспечивается лишь вращательное движение (движение В). В направлении оси х звено 3 относительно звена 2 может двигаться вращательно и поступательно (движение ВП). Относительные движения звеньев вокруг и вдоль оси у, а также вдоль оси z оказываются невозможными в связи с замкнутостью контактов кинематического соединения.
Подвижность заявляемого устройства может быть определена по формуле Сомова-Малышева [1, стр. 67, формула (2.8)]. Введя в эту формулу число подвижных звеньев соединения (n=2), двухподвижных пар четвертого класса (p4=1) и одноподвижных пар пятого класса (р5=1), получим
W=6n-5p5-4p4-3p3-2p2-p1=6⋅2⋅5⋅1-4⋅1-3⋅0-2⋅0-0=3.
Полученный результат доказывает, что заявляемое кинематическое соединение обладает тремя степенями свободы, то есть позволяет воспроизводить три относительных движения. Данное соединение с W=3 также может быть использовано в качестве трехподвижной кинематической пары с комплексом движений ВПВ.
Принцип работы трехзвенного кинематического соединения с тремя относительными движениями заключается в следующем. Задавая в пространстве xyz движения звеньям 2 и 3, удерживаемым звеном 1, относительно оси х будут обеспечены вращательное и поступательное движения, а относительно оси z - только вращательное. Предлагаемое трехзвенное кинематическое соединение обеспечивает комплекс трех относительных движений ВПВ.
Использованные источники
1. Артоболевский, И.И. Теория механизмов. Изд-во «Наука», Гл. ред. физ.-мат. лит-ры, 1965, 776 с.
2. Попугаев, М.Г. Разработка методов структурного синтеза трехзвенных механизмов [Текст]: автореф. дис. … канд. техн. наук: 05.02.18 / Попугаев Максим Геннадьевич. Омск: Омский гос. техн. ун-т. 2011. - 20 с.
3. Патент РФ 2332600, МПК6 F16H 25/00, F16H 21/02, F16S 5/00. Трехзвенное кинематическое соединение (треке) с шестью относительными движениями / Дворников Л.Т., Попугаев М.Г.; заявл. №2007108182/11; приоритет от.05.03.2007; опубл. 27.08.2008, Бюл. №24.
Трехзвенное кинематическое соединение с тремя относительными движениями, включающее входное, промежуточное и выходное звенья, где выходным звеном является прямой круговой цилиндр, отличающееся тем, что входное и промежуточное звенья соединены вращательной кинематической парой, геометрическая ось которой перпендикулярна продольной оси выходного звена - цилиндра, при этом выходное и промежуточное звенья входят в двухподвижную цилиндрическую кинематическую пару, а промежуточное звено выполнено в виде цилиндрического закрытого желоба.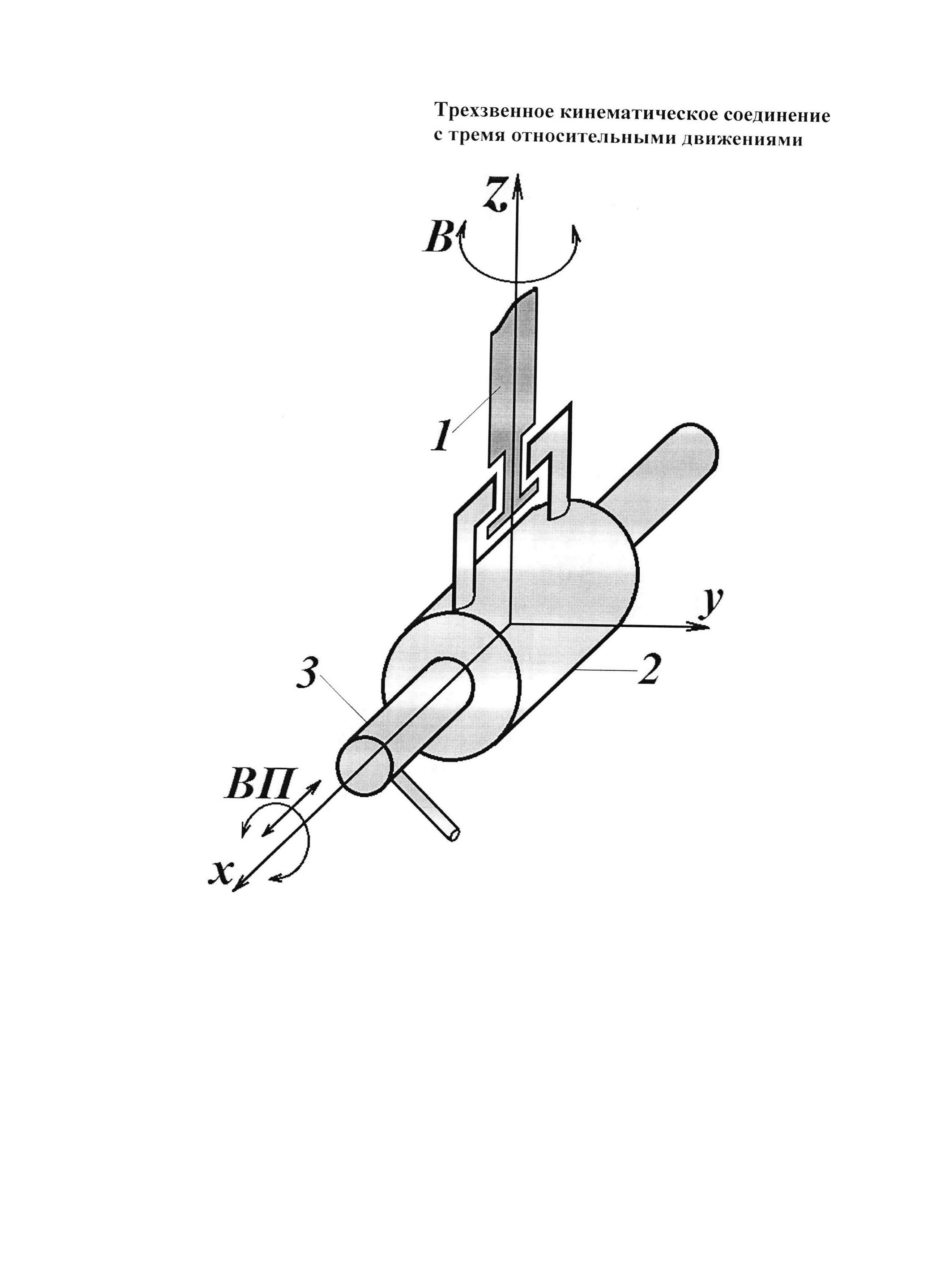
Удерживающая трехподвижная кинематическая пара
Пространственный четырехзвенный механизм
Трехподвижная кинематическая пара
Двухподвижная кинематическая пара
Двухподвижная кинематическая пара
Трехподвижная кинематическая пара
Способ определения оптимальных параметров давления прессования и влажности пресс-порошка для получения стеновых керамических материалов
Пространственный четырехзвенный механизм
Трехподвижная кинематическая пара
Двухподвижная кинематическая пара
Двухподвижная кинематическая пара
Трехподвижная кинематическая пара
Способ определения оптимальных параметров давления прессования и влажности пресс-порошка для получения стеновых керамических материалов
Пространственный механизм с круговым рычажным основанием
Механизм для вычерчивания пространственных кривых
Пространственный механизм для микропозиционирования
Устройство для пространственной ориентации объектов

