Результат интеллектуальной деятельности: РАДИОВОЛНОВОЙ СПОСОБ ОБНАРУЖЕНИЯ И РАСПОЗНАНИЯ ПЕРЕМЕЩАЮЩИХСЯ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ
Вид РИД
Изобретение
Изобретение относится к техническим средствам охраны и может быть использовано для обнаружения и распознавания перемещающихся объектов на охраняемом рубеже.
Существуют радиоволновые способы обнаружения перемещающихся объектов, основанные на регистрации изменений электромагнитного поля при пересечении объектом объемной зоны обнаружения между приемной и передающей антенными системами, которые реализованы в средстве обнаружения «Бином-2П». [1]
Способ обнаружения перемещающихся объектов, используемый в радиоволновом средстве обнаружения «Бином-2П», основан на регистрации изменений электромагнитного поля при пересечении объектом объемной зоны обнаружения, формируемой между излучающим кабелем и локальной приемной антенной, представляющей собой четвертьволновый вертикальный вибратор [1]. В передающем кабеле устанавливается режим, близкий к режиму бегущей волны, и часть электромагнитной энергии проникает в смеситель блока обработки, где используется в качестве опорного сигнала. На вход смесителя поступает сигнал с приемной антенны. При появлении перемещающегося объекта происходит низкочастотная модуляция амплитуды и фазы сигнала связи, в результате чего на выходе смесителя появляются низкочастотные биения, по наличию и характеру которых принимается решение о наличии или отсутствии объекта в зоне обнаружения.
Недостатком данного способа является малое время наработки на ложное срабатывание, обусловленное наличием приемника, чувствительного к воздействию электромагнитных помех.
Известен также радиоволновой способ обнаружения перемещающихся объектов [2], основанный на регистрации изменения коэффициента стоячей волны при пересечении объектом объемной зоны обнаружения. Данный способ обнаружения основан на мониторинге характеристик электромагнитного поля в зоне контроля излучателя. Наличие объекта в контролируемой зоне приводит к появлению дифрагированного на нем электромагнитного поля. Это поле воздействует на антенну первичного излучателя, создавая на его поверхности электродвижущую силу (ЭДС). В соответствии с требованиями граничных условий для идеальных проводников тангенциальная составляющая напряженности электрического поля на их поверхности должна равняться нулю. Для того, чтобы скомпенсировать наведенную объектом составляющую, распределение тока вдоль тела линейной антенны-излучателя должно измениться так, чтобы создалась компонента, равная по амплитуде наведенной, но противофазная ей.
Таким образом, присутствие объекта изменяет структуру электромагнитного поля излучателя, вследствие чего меняются электрические параметры самого излучателя. В качестве контролируемого параметра используется коэффициент стоячей волны (КСВ). Пересчет величин амплитуд падающей (Uпад) и отраженной (Uотр) волн в коэффициент стоячей волны осуществляется по формуле:

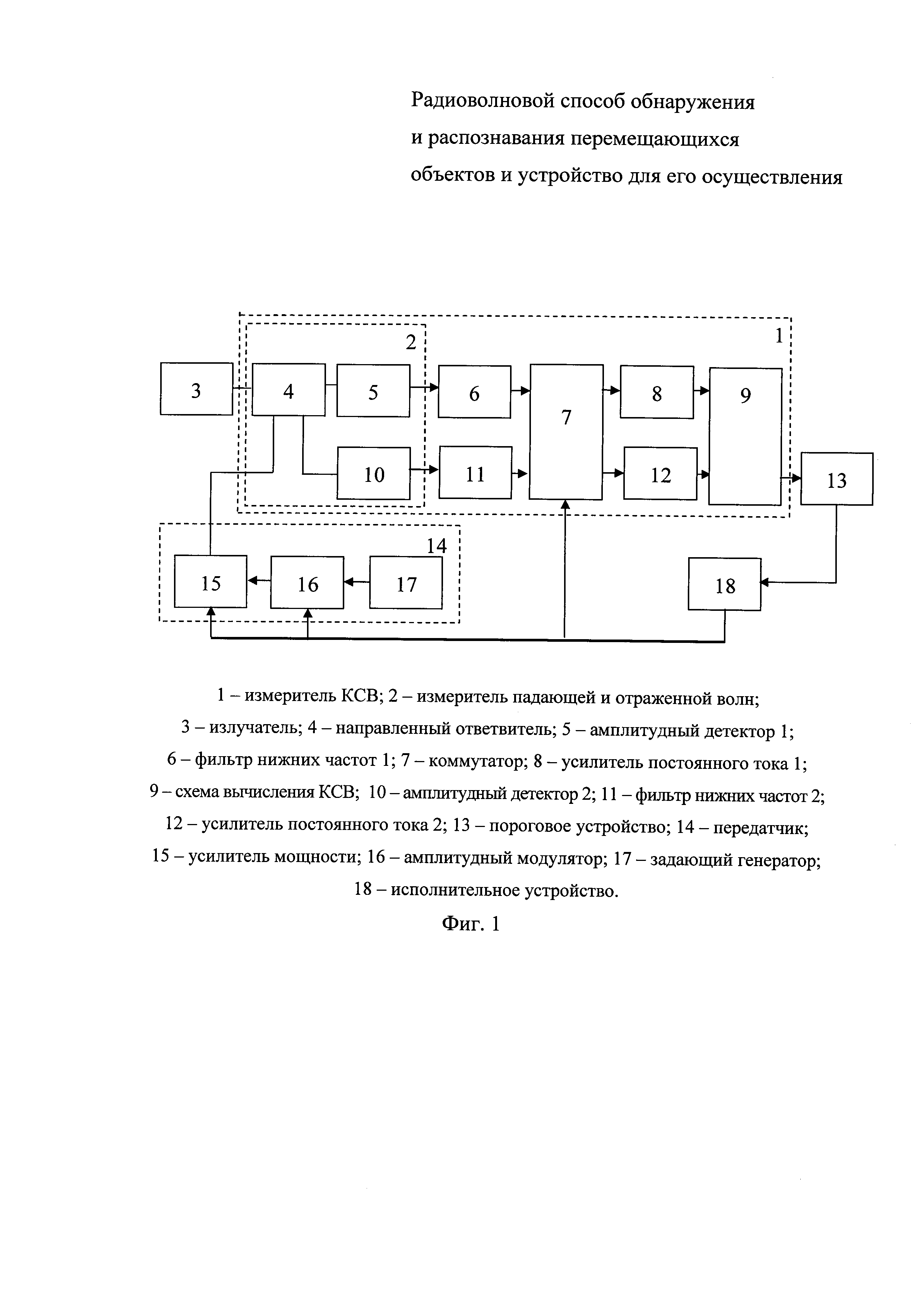
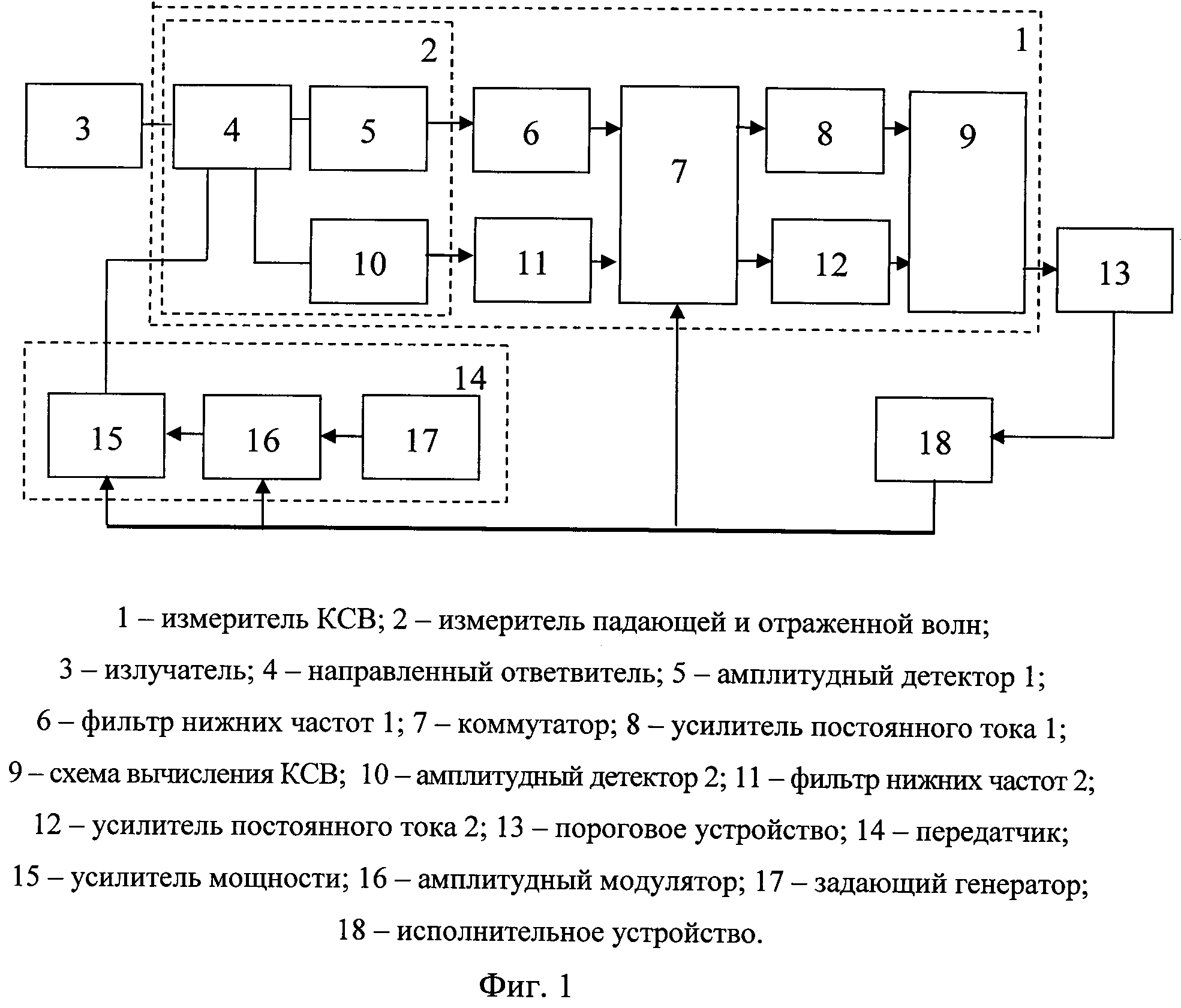
На фиг. 1 иллюстрируется вариант практической реализации данного радиоволнового способа обнаружения. В состав однопозиционного радиоволнового средства обнаружения входят: измеритель 1 коэффициента стоячей волны, состоящий из измерителя 2 падающей и отраженной волн, состоящего из направленного ответвителя 4 и амплитудных детекторов 5 и 10, фильтров 6 и 11 нижних частот, коммутатора 7, усилителей 8 и 12 постоянного тока, схемы 9 вычисления коэффициента стоячей волны, излучатель 3, пороговое устройство 13, передатчик 14, состоящий из усилителя 15 мощности, модулятора 16 и задающего генератора 17 и исполнительное устройство 18.
Измеритель 1 коэффициента стоячей волны последовательно разделяет сигнал, обрабатывает и усиливает его, таким образом, формирует информационный сигнал, соответствующий выражению (1).
В схеме измерителя 2 падающей и отраженной волн происходит разделение сигнала на два канала: падающей и отраженной волн.
Излучатель 3 представляет собой несимметричный четвертьволновый вибратор, который выполнен из проволоки диаметром 5-10 мм длиной 1,7 м. Излучатель 3 соединяется с направленным ответвителем 4, имеющим четыре плеча, к которым помимо излучателя 3 подключены усилитель 15 мощности и амплитудные детекторы 5 и 10.
Направленный ответвитель (НО) 4 предназначен для разделения падающей и отраженной волн.
Амплитудные детекторы 5 и 10 идентичны по структуре. Амплитудный детектор 5 используется для детектирования падающей волны, амплитудный детектор 10 - для отраженной волны. Амплитудные детекторы 5 и 10 своими выходами через фильтры нижних частот 6 и 11 соединяются с входами коммутатора 7.
Выходы фильтров нижних частот 6 и 11 соединены с входами коммутатора 7 и предназначены для удаления из сигнала высокочастотной составляющей, являющейся отрицательным воздействием от фона.
Коммутатор 7 осуществляет соединение выходов фильтров 6 и 11 нижних частот с входами усилителей 8 и 12 и предназначен для отключения усилителей 8 и 12 постоянного тока в момент передачи сигнала тревоги, поскольку для передачи используется чувствительный элемент (четвертьволновой вибратор). Выходы коммутатора 7 соединяются с входами усилителей постоянного тока 8 и 12.
Усилители постоянного тока 8 и 12 осуществляют усиление информационного сигнала по току. Выходы усилителей постоянного тока 8 и 12 соединяются с входами схемы 9 вычисления КСВ.
Выход схемы 9 вычисления КСВ соединяется с входом порогового устройства 13. В качестве порогового устройства 13 используется компаратор, на один вход которого подается опорное напряжение, задающее порог срабатывания компаратора, а на второй - сигнал со схемы 9 вычисления КСВ. Выход порогового устройства 13 соединен с входом системы 18 определения дальности.
Передатчик 14 предназначен для выработки электромагнитных колебаний и передачи сигнала срабатывания на приемное устройство системы сбора и обработки информации. Задающий генератор 17 генерирует высокостабильные радиочастотные колебания в заданном диапазоне частот.
Передатчик 14 состоит из задающего генератора 17, формирующего синусоидальный сигнал, который в дальнейшем используется как несущая, модулятора 16, который изменяет несущий сигнал по закону передаваемого сообщения, и усилителя 15 мощности, который выступает как оконечный каскад передатчика 14 и формирует сигнал определенной мощности для передачи сообщения через радиоканал.
Выход исполнительного устройства 18 соединяется со входом коммутатора 7, со входом амплитудного модулятора 16 и входом усилителя 15 мощности. Устройство работает следующим образом.
В исходном состоянии («дежурном» режиме) передатчик 14 вырабатывает электромагнитные колебания на заданной частоте излучения f1 при мощности излучения РΣдеж, которые через направленный ответвитель 4 излучаются излучателем 3. На выходе исполнительного устройства 18 сигнал срабатывания отсутствует.
В случае появления объекта обнаружения амплитуда отраженной волны увеличивается, вследствие чего меняется величина коэффициента стоячей волны. Эта величина сравнивается с заданным пороговым значением в пороговом устройстве 13. При превышении порогового значения происходит срабатывание порогового устройства, которое вызывает включение исполнительного устройства 18. Исполнительное устройство 18 переключает коммутатор 7, включает амплитудный модулятор 16 и усилитель мощности 15 в режим передачи сигнала "Тревога". Коммутатор отключает усилители 8 и 12 и схему 9 вычисления КСВ. Амплитудный модулятор 16 начинает вырабатывать кодовую последовательность импульсов, соответствующую сигналу «Тревога». Усилитель 15 мощности, имеющий в своем составе регулирующий элемент, позволяет увеличить выходную мощность передатчика 14, обеспечивая передачу информации по радиоканалу. Через определенное время исполнительное устройство 18 переходит в дежурный режим, переключает коммутатор 7 в исходное состояние, и мощность излучения передатчика 14 уменьшается.
Недостатками данного способа являются низкие помехоустойчивость и информативность ввиду отсутствия возможности распознавания обнаруженных перемещающихся объектов (людей и животных).
Целью данного изобретения является повышение помехоустойчивости средства обнаружения за счет распознавания людей и животных при пересечении объектом объемной зоны обнаружения.
Основными задачами, решаемыми в изобретении, являются:
1) разработка способа обнаружения и распознавания, основанного на определении расстояния до объекта обнаружения при помощи подсистемы локации и классификации воздействий: объект обнаружения - животные - помеха.
2) создание устройства для реализации разработанного способа.
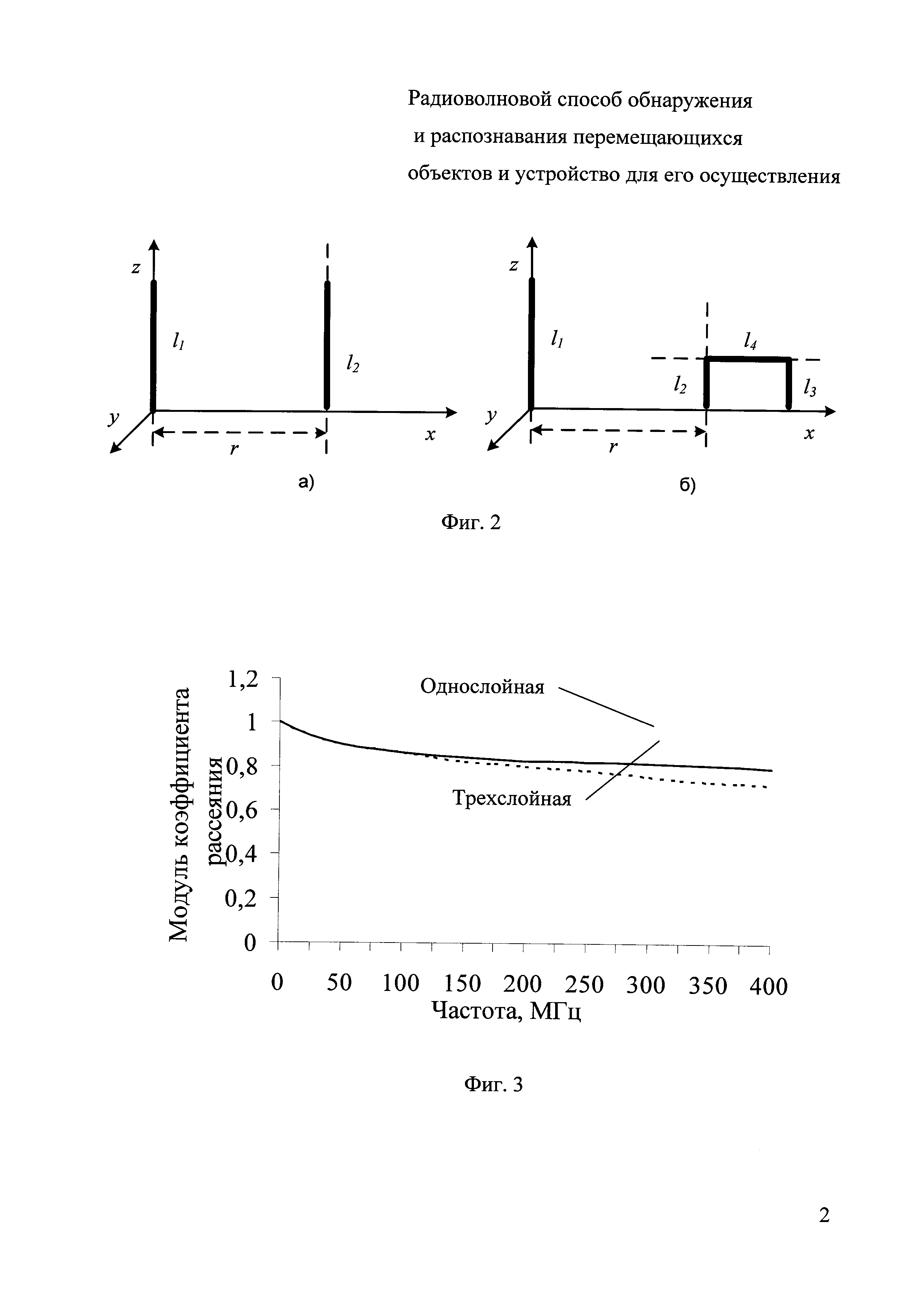
Известно, что модель человека, взаимодействующая с чувствительным элементом (l1) средства обнаружения в диапазоне частот до 100 МГц, представляется в виде простого вертикального вибратора длиной (l2), соответствующей среднему росту человека (фиг. 2а), и рассматривается как однослойная модель (воздушная среда, слой кожи). [3]
Анализ электрофизических характеристик животного показал, что кожный покров, мышечная и жировая ткани весьма схожи с характеристиками тела человека. На основании исследования модуля коэффициента рассеяния для однослойной и трехслойной (воздушная среда, слой кожи, слой жира и бесконечный по толщине слой мышечной ткани) модели животного установлено, что в диапазоне частот до 100 МГц тело животного можно описать однослойной моделью с параметрами кожной ткани (фиг. 3). Следовательно, на частотах до 100 МГц тело животного можно считать проводящим, а преломленные волны в его тканях плоскими. При этом допустимо представление тела животного в виде П-образного пассивного вибратора, состоящего из системы двух вертикальных электрических вибраторов (l2, l3), соответствующих высоте передних и задних конечностей, находящихся на расстоянии, равном длине (l4) тела животного (фиг. 2б).
Таким образом, в диапазоне частот до 100 МГц модели человека и животных отличаются количеством, геометрическими размерами и пространственным положением описывающих их пассивных вибраторов.
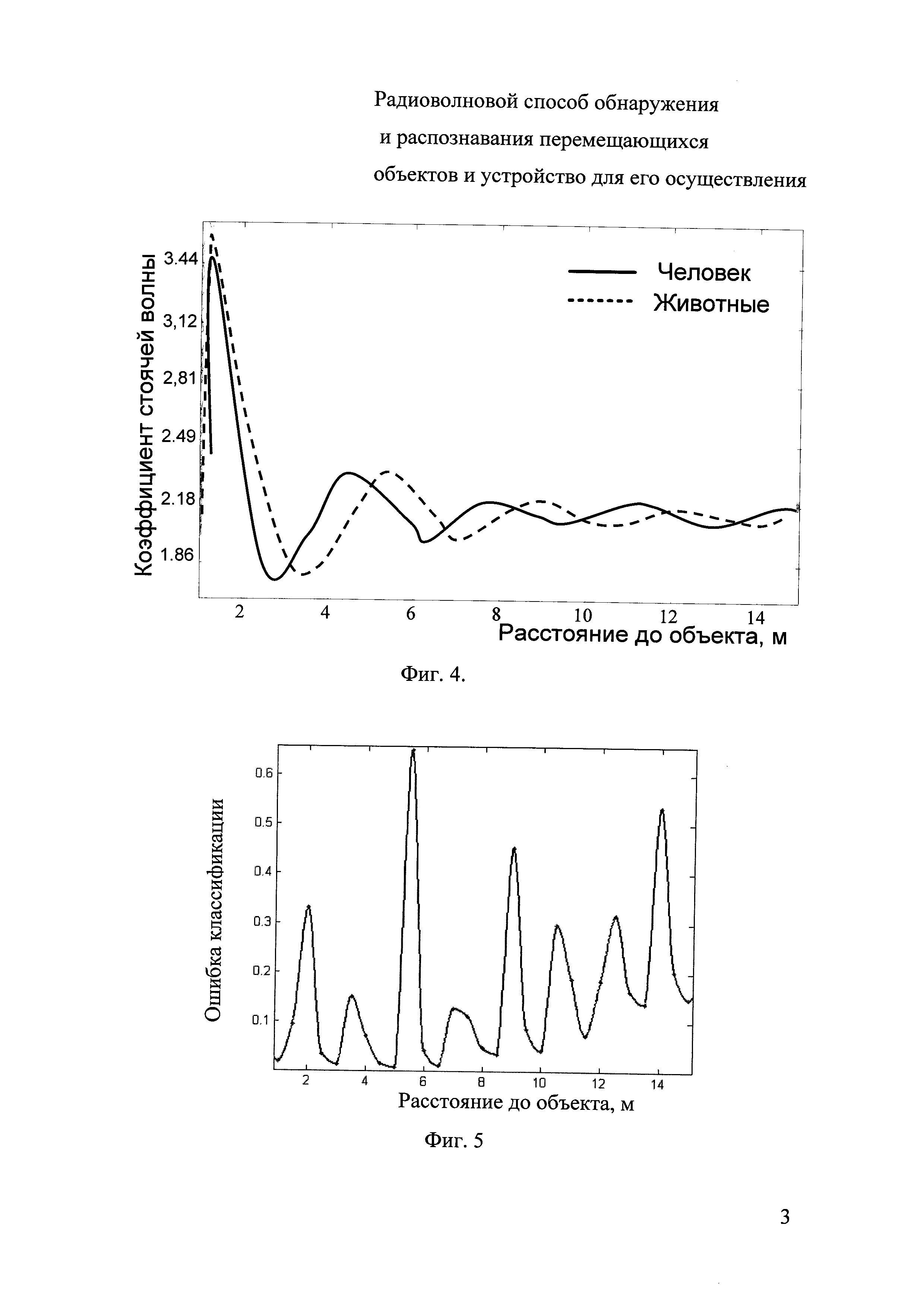
Для построения алгоритма работы классификатора выбран линейный дискриминант Фишера [5]. При этом в двумерном пространстве признаков в качестве параметров используются коэффициент отражения и расстояние до объекта обнаружения. В итоге получена зависимость ошибки классификации от расстояния до объектов обнаружения (фиг. 5). Анализ распределений объектов обнаружения в признаковом пространстве позволил сделать выводы о возможности компактного группирования классов: «животные», «человек», «помеха».
Таким образом, исследования доказали возможность обнаружения и распознавания человека в условиях воздействия животных на основании регистрации изменения электромагнитного поля вокруг передающей антенны путем измерения КСВ и расстояния до объекта, полученного от системы определения дальности.
Сущность изобретения поясняется чертежами, где на:
- фиг. 1 представлена структурная схема радиоволнового средства обнаружения;
- фиг. 2 - электродинамические модели человека (а) и животного (б);
- фиг. 3 - графики зависимостей модулей коэффициентов рассеяния от частоты для однослойной и трехслойной моделей объектов обнаружения;
- фиг. 4 - график зависимости коэффициента стоячей волны активного вибратора от расстояния до объекта обнаружения;
- фиг. 5 - график зависимости ошибки классификации (MSE) от расстояния до объектов обнаружения;
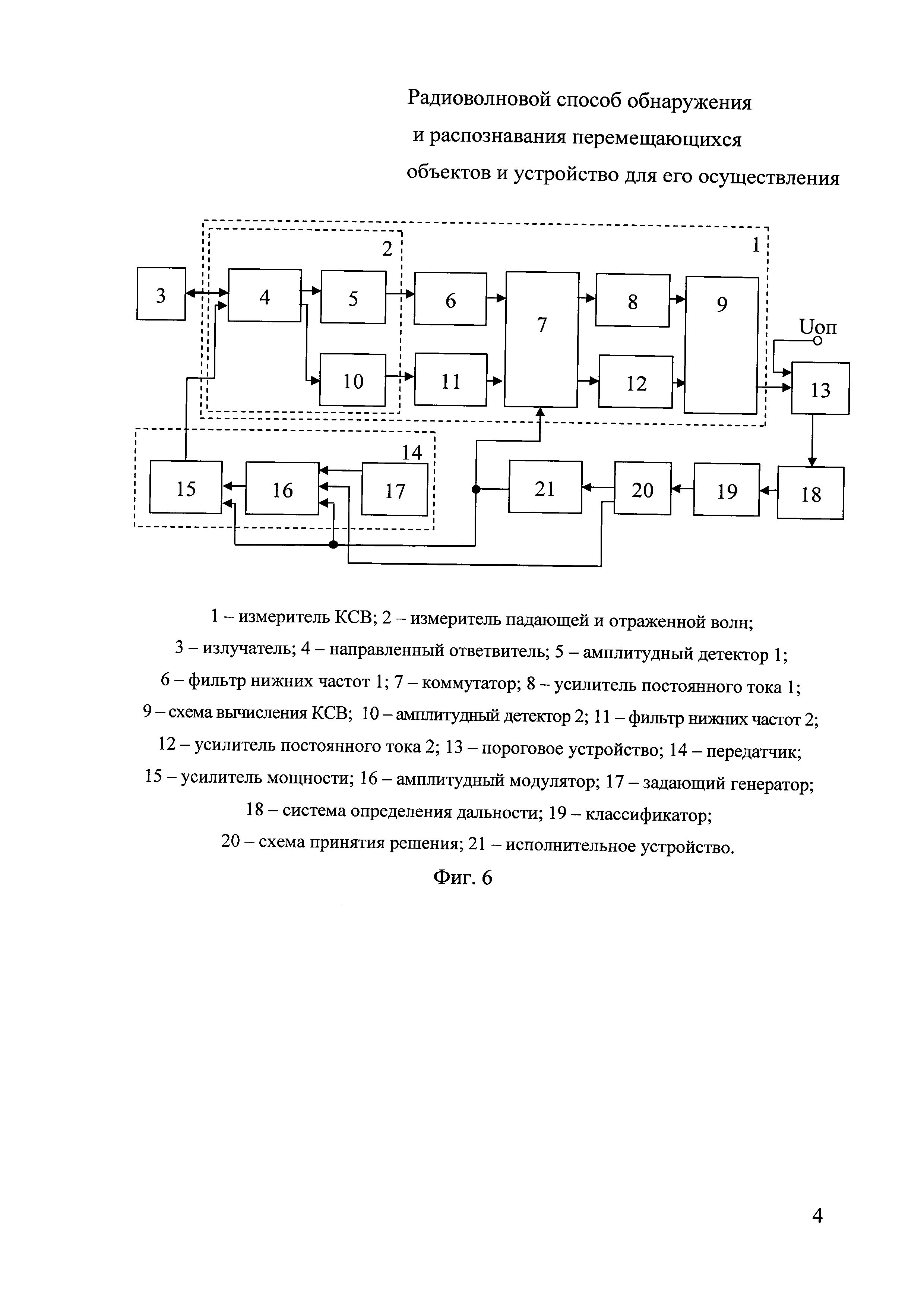
- фиг. 6 - структурная схема предлагаемого радиоволнового средства обнаружения и распознавания;
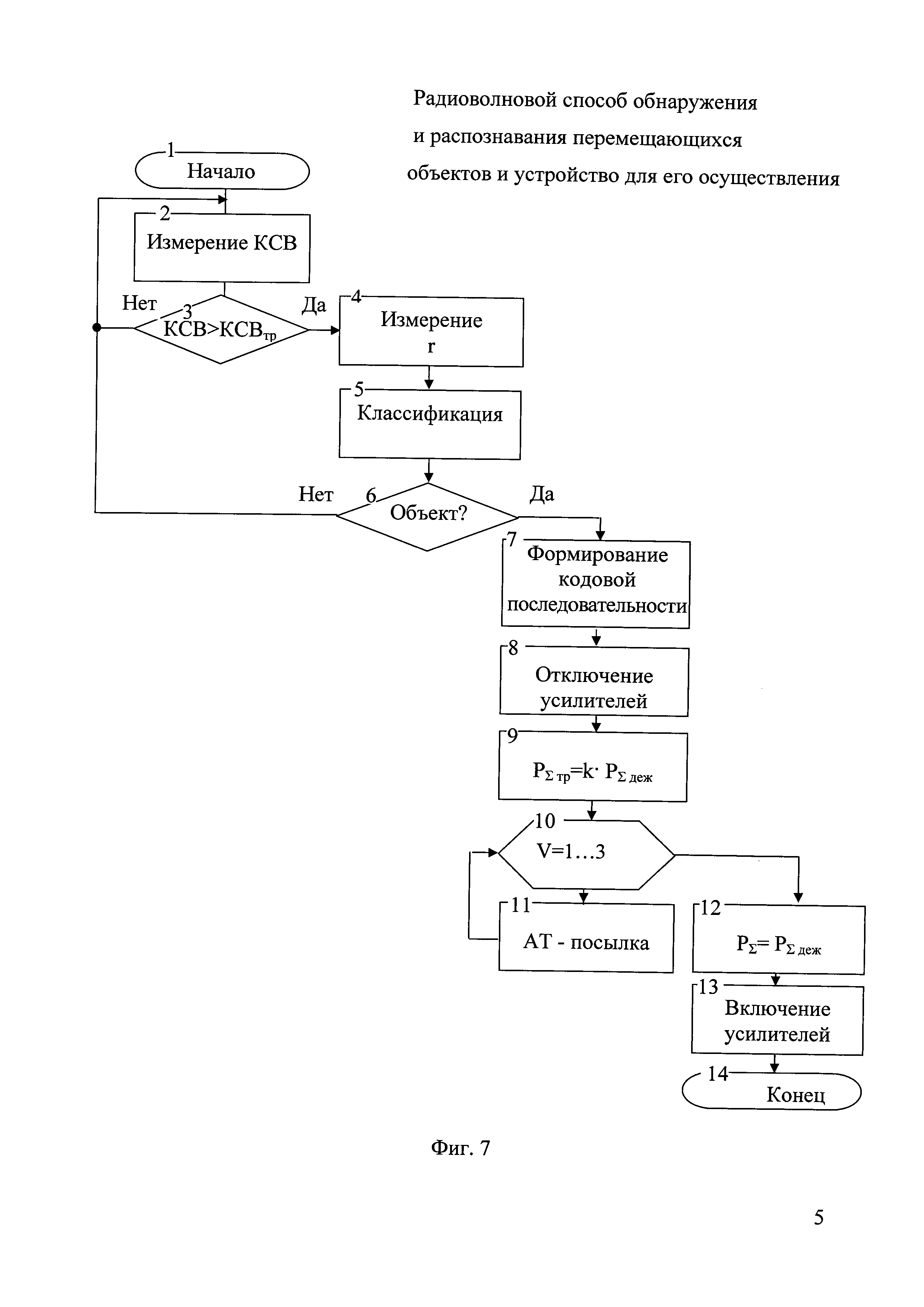
- фиг. 7 - алгоритм функционирования радиоволнового средства обнаружения и распознавания объектов.
Радиоволновой способ обнаружения и распознавания перемещающихся объектов заключается в следующем:
1. Регистрация изменения электромагнитного поля вокруг передающей антенны по изменению значения КСВ при появлении объекта в зоне обнаружения.
2. Определение расстояния от передающей антенны до объекта обнаружения системой определения дальности.
3. Классификация объекта обнаружения по двум признакам: значение КСВ и расстояние до объекта обнаружения.
4. При классификации объекта обнаружения как «человек» происходит выдача сигнала тревоги. Во всех остальных случаях («животное», «помеха») система продолжает работать в дежурном режиме.
Для реализации данного способа предложено радиоволновое средство обнаружения и распознавания, вариант реализации которого представлен на фиг. 6. В состав однопозиционного радиоволнового средства обнаружения и распознавания перемещающихся объектов входят: измеритель 1 коэффициента стоячей волны, состоящий из измерителя 2 падающей и отраженной волн, состоящего из направленного ответвителя 4 и амплитудных детекторов 5 и 10, фильтров 6 и 11 нижних частот, коммутатора 7, усилителей 8 и 12 постоянного тока, схемы 9 вычисления коэффициента стоячей волны, излучатель 3, пороговое устройство 13, передатчик 14, состоящий из усилителя 15 мощности, модулятора 16 и задающего генератора 17, система 18 определения дальности, классификатор 19, схема 20 принятия решения и исполнительное устройство 21.
Измеритель 1 коэффициента стоячей волны последовательно разделяет сигнал, обрабатывает и усиливает его, таким образом формирует информационный сигнал, соответствующий выражению (1).
В схеме измерителя 2 падающей и отраженной волн происходит разделение сигнала на два канала - падающей и отраженной волн.
Излучатель 3 представляет собой несимметричный четвертьволновый вибратор, который выполнен из проволоки диаметром 5-10 мм длиной 1,7 м. Выход излучателя 3 соединен со входом направленного ответвителя 4, имеющего четыре плеча, к которым помимо излучателя 3 подключены выход усилителя 15 мощности и входы амплитудных детекторов 5 и 10.
Направленный ответвитель (НО) 4 предназначен для разделения падающей и отраженной волн. Направленный ответвитель должен быть полностью согласован с подводящими линиями и не должен вносить потерь в передаваемые сигналы.
При отсутствии объектов обнаружения в зоне действия излучателя НО полностью согласован. При этом отраженная волна имеет на выходе минимальную амплитуду. При появлении нарушителя в зоне действия излучателя модуль входного сопротивления изменяется по величине, следовательно, ухудшается согласование антенны. При этом амплитуда отраженной волны увеличивается, что ведет к изменению коэффициента стоячей волны.
Амплитудные детекторы 5 и 10 идентичны по структуре. Амплитудный детектор 5 используется для детектирования падающей волны, амплитудный детектор 10 - для отраженной волны. Амплитудные детекторы 5 и 10 своими выходами через фильтры нижних частот 6 и 11 соединяются с входами коммутатора 7.
Выходы фильтров нижних частот 6 и 11 соединены с входами коммутатора 7, фильтры предназначены для удаления из сигнала высокочастотной составляющей, являющейся отрицательным воздействием от фона.
Коммутатор 7 осуществляет соединение выходов фильтров 6 и 11 нижних частот с входами усилителей 8 и 12 и предназначен для отключения усилителей 8 и 12 постоянного тока в момент передачи сигнала тревоги, поскольку для передачи используется чувствительный элемент (четвертьволновой вибратор). Выходы коммутатора 7 соединены с входами усилителей постоянного тока 8 и 12.
Усилители постоянного тока 8 и 12 осуществляют усиление информационного сигнала по току. Выходы усилителей постоянного тока 8 и 12 соединены с входами схемы 9 вычисления КСВ.
Выход схемы 9 вычисления КСВ соединен с входом порогового устройства 13. В качестве порогового устройства 13 используется компаратор, на один вход которого подается опорное напряжение, задающее порог срабатывания компаратора, а на второй - сигнал со схемы 9 вычисления КСВ. Выход порогового устройства 13 соединен с входом системы 18 определения дальности.
Передатчик 14 предназначен для выработки электромагнитных колебаний и передачи сигнала срабатывания на приемное устройство системы сбора и обработки информации. Задающий генератор (например, кварцевый) генерирует высокостабильные радиочастотные колебания в заданном диапазоне частот.
Передатчик 14 состоит из задающего генератора 17, формирующего синусоидальный сигнал, который в дальнейшем используется как несущая, модулятора 16, который изменяет несущий сигнал по закону передаваемого сообщения, и усилителя 15 мощности, который выступает как оконечный каскад передатчика 14 и формирует сигнал определенной мощности для передачи сообщения через радиоканал.
Система 18 определения дальности предназначена для определения расстояния от излучателя до обнаруженного объекта и может быть реализована как дальномер, локатор и т.п. [6, 7] Выход системы 18 определения дальности соединяется с входом классификатора 19.
Классификатор 19 предназначен для классификации обнаруженных сигналов от объектов по двум признакам: измеренному коэффициенту стоячей волны и расстоянию от излучателя до объекта, например, на основе линейного дискриминанта Фишера. [5] Выход классификатора 19 соединяется с входом схемы 20 принятия решения.
Схема 20 принятия решения предназначена для разделения классифицированных сигналов на сигналы от объектов и помехи в соответствии с заданными настройками и управления исполнительным устройством 21. При распознавании «полезного» сигнала от объекта схема 20 принятия решения формирует кодовую последовательность в виде сигнала «Тревога» или информационного сообщения о классе объекта и расстоянии между ним и излучателем. Если какой-то класс объектов при настройке задан как помеха (например, определенный тип животных), то схема 20 принятия решения кодовую последовательность не формирует. Выход схемы 20 принятия решения соединяется с входом исполнительного устройства 21 и с входом амплитудного модулятора 16.
Классификатор 19 и схема 20 принятия решения могут быть реализованы в микропроцессоре (например, микроконтроллер MSP 430 фирмы Texas Instruments).
Выход исполнительного устройства 21 соединен с входом коммутатора 7, с входом амплитудного модулятора 16 и входом усилителя 15 мощности.
Устройство работает следующим образом.
В исходном состоянии («дежурном» режиме) передатчик 14 вырабатывает электромагнитные колебания, которые через направленный ответвитель 4 излучаются излучателем 3 на заданной частоте излучения при мощности излучения РΣдеж. На выходе исполнительного устройства 21 сигнал срабатывания отсутствует.
С выхода схемы 9 вычисления коэффициента стоячей волны сигнал поступает в пороговое устройство 13. Срабатывание порогового устройства 13 по превышению амплитуды КСВ вызывает запуск системы 18 измерения дальности и классификатора 19. Система 18 определения дальности определяет расстояние от излучателя до объекта и передает полученную информацию на классификатор 19. Классификатор 19 определяет, к какому классу относится объект (человек, животное, помеха) и подает эту информацию в схему 20 принятия решения. При распознавании класса объекта как человека или животного схема 20 принятия решения вызывает включение исполнительного устройства 21 и формирует кодовую последовательность. Исполнительное устройство 21 переключает коммутатор 7, отключая усилители 8 и 12 постоянного тока, соответственно отключается схема 9 вычисления коэффициента стоячей волны, включает амплитудный модулятор 16 и усилитель 15 мощности в режим передачи сигнала «Тревога». Амплитудный модулятор 16 модулирует колебания задающего генератора 17 кодовой последовательностью, поступающей со схемы 20 принятия решения. Усилитель 15 мощности, имеющий в своем составе регулирующий элемент, позволяющий увеличивать выходную мощность передатчика, обеспечивает передачу информации по радиоканалу. Через определенное время исполнительное устройство 21 переходит в «дежурный» режим, переключает коммутатор 7 в исходное состояние, и мощность излучения передатчика 14 уменьшается.
Описание алгоритма работы устройства, реализующего радиоволновой способ обнаружения и распознавания объектов (фиг. 7), включает:
1. Излучение сигнала на заданной частоте излучения с мощностью излучения РΣдеж, необходимой для обнаружения человека.
2. Измерение значения коэффициента стоячей волны.
3. Принятие решения о выполнении условия КСВ больше КСВтр: если условие выполняется, то происходит продолжение анализа сигнала, если нет - повторяется операция измерения КСВ.
4. Определение расстояния r от излучателя до объекта.
5. Классификация обнаруженного объекта по расстоянию и КСВ.
6. Принятие решения о выполнении условия о классе: если человек или животное, - то продолжение анализа, если нет - возврат на начало.
7. Формирование кодовой последовательности в виде сигнала «Тревога» или информационного сообщения о классе объекта и расстоянии между ним и излучателем.
8. Отключение усилителей 8 и 12 постоянного тока.
9. Увеличение мощности излучения с помощью усилителя мощности, необходимой для передачи сигнала «Тревога».
10. Начало мажоритарного цикла передачи сигнала «Тревога» (V=1…3).
11. Передача АТ-сигналов. Завершается мажоритарный цикл.
12. Уменьшение мощности излучения до величины, необходимой для работы РВСО в «дежурном» режиме.
13. Включение усилителей 8 и 12 постоянного тока.
14. Переход РВСО в дежурный режим.
Таким образом, предлагаемый способ и устройство для его реализации позволяют повысить помехоустойчивость за счет распознавания людей и животных при пересечении объектом объемной зоны обнаружения.
Технический результат достигается за счет совместного использования однопозиционного радиоволнового способа обнаружения и системы определения дальности с последующей классификацией перемещающегося объекта по двум признакам: коэффициенту стоячей волны и расстоянию от излучателя до объекта.
Источники информации
1. Средство БИНОМ-2П. Руководство по эксплуатации ЦКДИ. 425342.005 РЭ. 1998 - 56 с.
2. Пат. 2292600 Российская Федерация. Радиоволновой способ обнаружения перемещающихся объектов / Крюков И.Н., Онуфриев Н.В., Соколова М.А., Иванов В.А. - опубл. 27.01.2007. Бюл. №3. - 17 с.
3. Соколова М.А., Карвецкий В.Л. Модель взаимодействия излучателя с посторонним объектом // Радиотехника. Сер. Радиосистемы (журнал в журнале). Вып.85. Территориально распределенные системы охраны. - 2005. - №3. - С. 9-11.
4. Онуфриев Н.В., Скридлевский А.В., Соколова М.А. Электрофизические характеристики биологических объектов для точечного радиоволнового средства обнаружения // Радиотехника. Сер. Радиосистемы (журнал в журнале). Вып.160. Территориально распределенные системы охраны. - 2011. - №9. - С. 88-91.
5. Справочник по прикладной статистике. В 2-х т.Т.2.: Пер. с англ.; под ред. Э. Ллойда, У. Ледермана, С.А. Айвазяна, Ю.Н. Тюрина. - М.: Финансы и статистика, 1990. - 526 с.
6. Пат. 2273867 Российская Федерация. Сейсмическое устройство определения координат объектов / И.Н. Крюков, В.А. Иванов, А.К. Козинный, В.В. Матвеев. - опубл. 10.04.06, Бюл. №14. - 10 с.
7. ИК-дальномер Sharp GP2D120XJ00F IR Package R146-GP2D120 http://www.sharpsma.com/webfm_send/1205.
Способ сигнализационного прикрытия перекрестка дорог
Способ определения направления движения нарушителя
Устройство комбинированной панели для защиты дорожных транспортных средств от пуль и осколков
Топливный бак транспортного средства
Способ сигнализационного прикрытия перекрестка дорог и путей его обхода
Способ сигнализационного прикрытия перекрёстка дорог и путей его обхода
Устройство для тушения шин транспортного средства
Устройство обеспечения видимости для водителя транспортного средства
Устройство для защиты водителя транспортного средства
Способ обнаружения нарушителя и определения направления его движения на перекрестке дорог и путях его обхода
Способ сигнализационного прикрытия перекрестка дорог
Способ определения направления движения нарушителя
Устройство комбинированной панели для защиты дорожных транспортных средств от пуль и осколков
Топливный бак транспортного средства
Способ сигнализационного прикрытия перекрестка дорог и путей его обхода
Способ сигнализационного прикрытия перекрёстка дорог и путей его обхода
Устройство для тушения шин транспортного средства
Устройство обеспечения видимости для водителя транспортного средства
Устройство для защиты водителя транспортного средства
Способ обнаружения нарушителя и определения направления его движения на перекрестке дорог и путях его обхода

