Результат интеллектуальной деятельности: СПОСОБ ИЗМЕРЕНИЯ ПОВЕРХНОСТИ ОБЪЕКТА В РЕЖИМЕ СКАНИРУЮЩЕГО ЗОНДОВОГО МИКРОСКОПА
Вид РИД
Изобретение
Изобретение относится к измерительной технике, а более конкретно к способам измерения зондовыми методами объектов после нанотомирования. Оно может быть использовано для исследования структур образцов, например, биоматериалов и изделий медицинского назначения.
Известен способ измерения поверхности объекта в режиме сканирующего зондового микроскопа, включающий подготовку поверхности объекта путем ее среза за счет относительного перемещения объекта и ножа по третьей координате Z, сближение зонда с поверхностью объекта по первой координате X, относительное сканирование зонда и поверхности объекта в плоскости второй координаты Y и третьей координаты Z и проведение измерения поверхности объекта в режиме сканирующего зондового микроскопа с составлением карты поверхности объекта [1]. Этот способ выбран в качестве прототипа настоящего изобретения.
Недостаток этого способа связан с низким качеством подготовки поверхности объектов к измерению, что приводит к снижению качества зондовых измерений за счет негативного влияния неровностей срезанной поверхности объектов на процесс измерений.
Технический результат изобретения заключается в повышении качества подготовки поверхности объектов к измерению и, соответственно, повышении качества зондовых измерений за счет уменьшения влияния неровностей срезанной поверхности объектов на процесс измерений.
Указанный технический результат достигается тем, что в способе измерения поверхности объекта в режиме сканирующего зондового микроскопа, включающем подготовку поверхности объекта путем ее среза за счет относительного перемещения по третьей координате Z объекта и ножа с кромкой, расположенной вдоль второй координаты Y, сближение зонда с поверхностью объекта по первой координате X, относительное сканирование зонда и поверхности объекта в плоскости второй координаты Y и третьей координаты Z и проведение измерения поверхности объекта в режиме сканирующего зондового микроскопа с составлением карты поверхности объекта, подготовку поверхности объекта дополняют периодическим перемещением поверхности объекта относительно ножа.
В одном из вариантов периодическое перемещение поверхности объекта осуществляют по второй координате Y.
В одном из вариантов периодическое перемещение поверхности объекта по второй координате Y осуществляют с постоянной амплитудой и постоянной частотой.
В одном из вариантов периодическое перемещение поверхности объекта по второй координате Y осуществляют с постоянной амплитудой и переменной частотой.
В одном из вариантов периодическое перемещение поверхности объекта по второй координате Y осуществляют с переменной амплитудой и постоянной частотой.
В одном из вариантов периодическое перемещение поверхности объекта по второй координате Y осуществляют с переменной амплитудой и переменной частотой.
В одном из вариантов периодическое перемещение поверхности объекта осуществляют по третьей координате Z.
В одном из вариантов периодическое перемещение поверхности объекта осуществляют по второй координате Y и по третьей координате Z.
В одном из вариантов периодическое перемещение поверхности объекта осуществляют по первой координате X.
В одном из вариантов периодическое перемещение поверхности объекта осуществляют после составления карты физических свойств поверхности объекта и в соответствии с неоднородностью физических свойств поверхности объекта.
В одном из вариантов периодическое перемещение поверхности объекта осуществляют после составления карты морфологии поверхности объекта и в соответствии с неоднородностью морфологии поверхности объекта.
В одном из вариантов периодическое перемещение поверхности объекта дополняют управляемым перемещением поверхности объекта по первой координате X в соответствии с морфологией поверхности объекта.
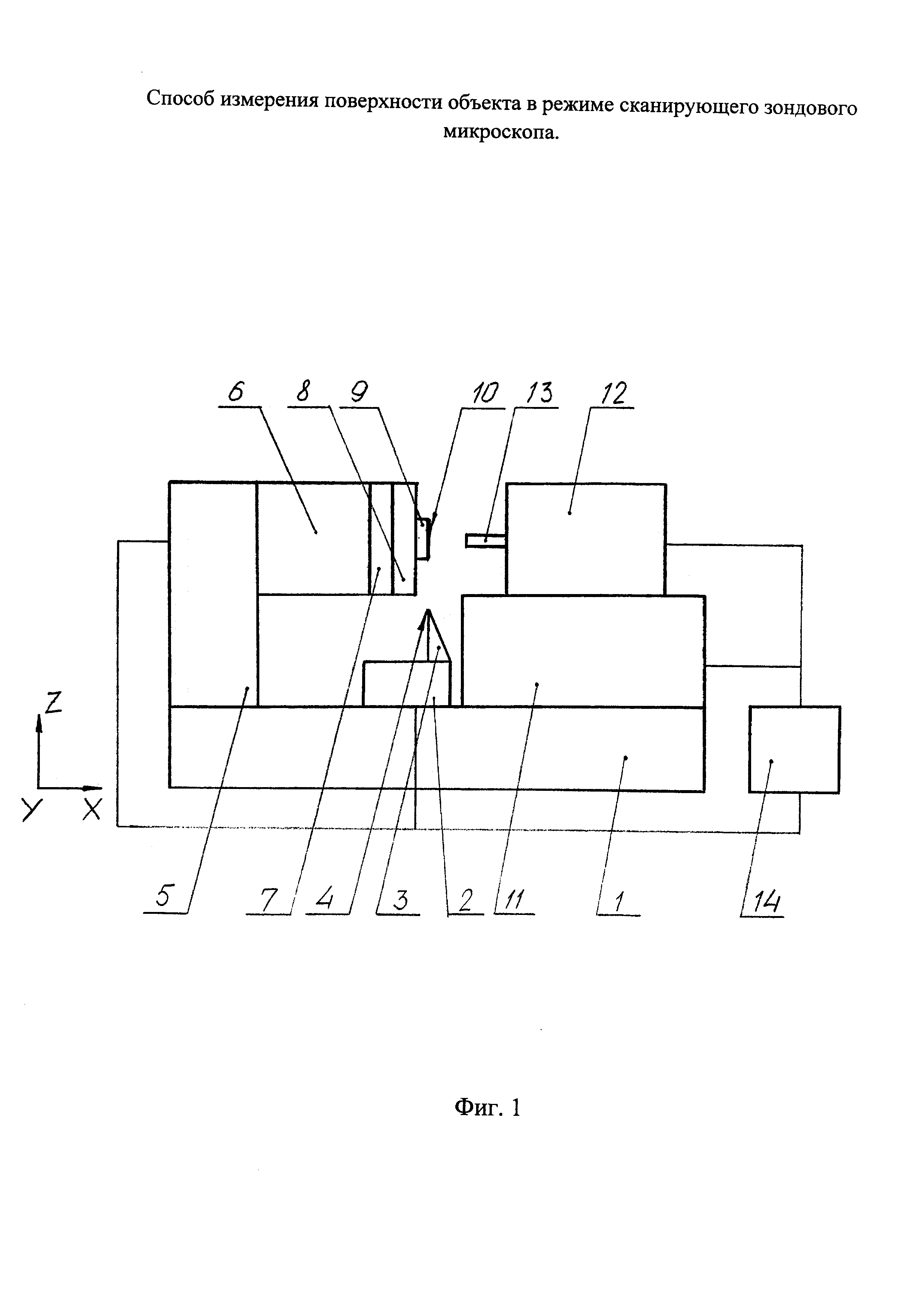
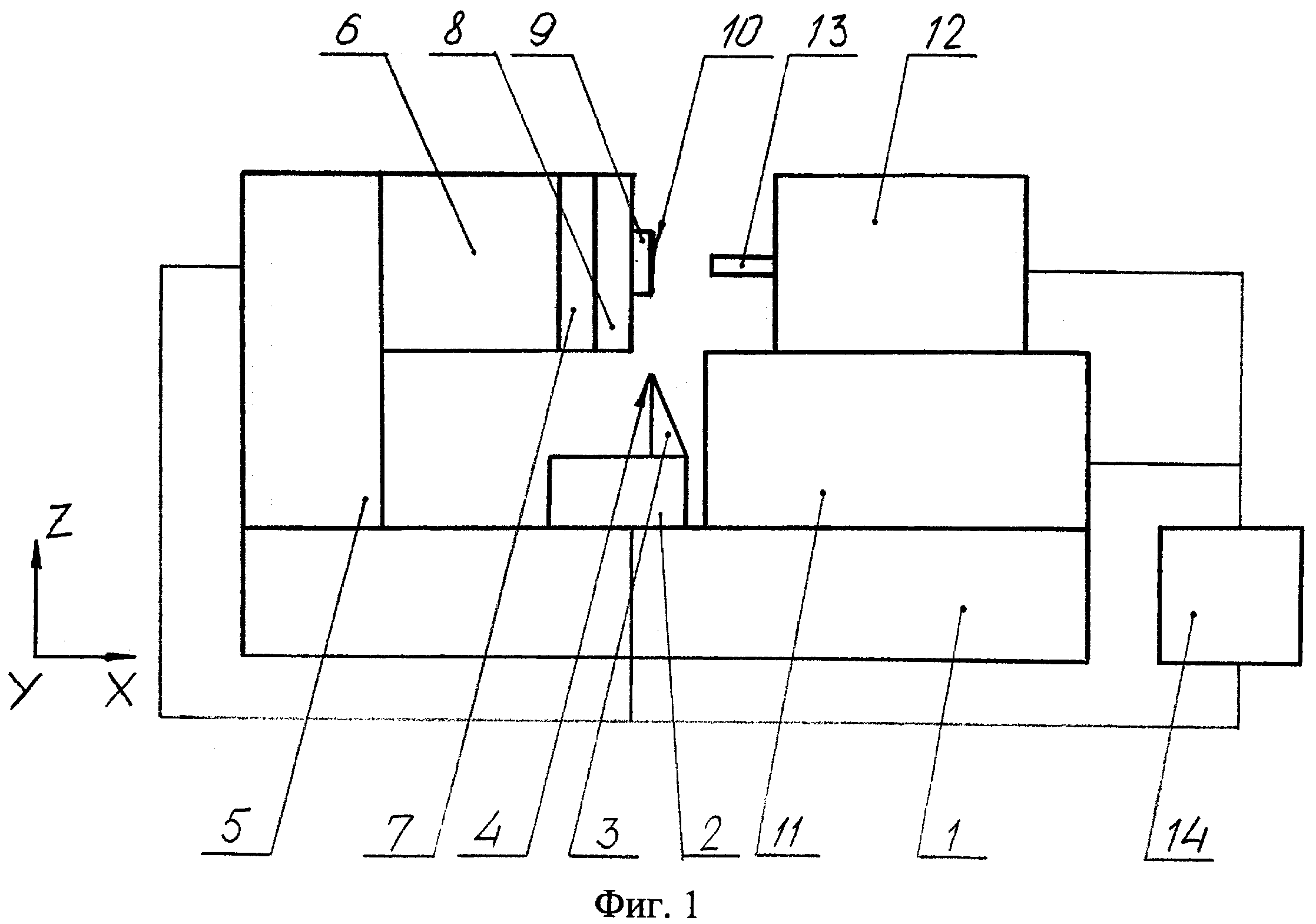
На фиг. 1 изображена компоновочная схема сканирующего зондового микроскопа, совмещенного с устройством модификации поверхности объекта, на котором может быть реализован предложенный способ измерения поверхности объекта. Он содержит основание 1, на котором установлен модуль ножа 2 с ножом 3. При этом нож 3 включает режущую кромку 4, расположенную вдоль второй координаты Y. Модуль ножа 2 имеет возможность перемещения по первой координате X и по второй координате Y. На основании 1 установлен также модуль объекта 5 с пьезосканером 6, включающим держатель 7, на который устанавливают носитель 8 объекта 9 с поверхностью 10. Модуль объекта 5 имеет возможность перемещения пьезосканера 6 по направлению третьей координаты Z. Пьезосканер 6 обеспечивает перемещения объекта 9 по координатам X, Y, Z. Нож 3 расположен с возможностью взаимодействия с объектом 9. Закрепление объекта 9 на носителе 8 может быть выполнено посредством клея, например эпоксидной смолы. Закрепление носителя 8 на держателе 7 может быть магнитное. Для этого держатель 7 может быть изготовлен, например, из сплава самарий-кобальт либо включать вставку из этого сплава (не показана). Носитель 8 при этом может быть изготовлен из никеля. Сканирующий зондовый микроскоп, совмещенный с устройством модификации поверхности объекта, содержит также модуль зонда 11 с модулем подвижки 12, в котором закреплен зонд 13. При этом модуль подвижки 12 установлен на модуле зонда 11 с возможностью перемещения по первой координате X, а зонд 13 имеет возможность взаимодействия с поверхностью 10 объекта 9. В качестве зонда 13 обычно используют кварцевый резонатор с заострением (не показан). Модуль зонда 11 может иметь возможность перемещения по координатам Y, Z для поиска нужной зоны сканирования зондом 13 поверхности 10. Элементы 1, 2, 3, 4, 5 являются стандартными составляющими микротома и описаны в [1, 2, 3, 4]. Элементы 6, 7, 8, 11, 12, 13 являются стандартными составляющими сканирующего зондового микроскопа и описаны в [1, 2]. Модуль ножа 2, модуль объекта 5, модуль зонда 11 и модуль подвижки 12 подключены к блоку управления 14. В одном из вариантов основание 1 с расположенными на нем модулями может быть размещено в криокамере (не показано). Этот вариант подробно описан в [2, 5].
Работа сканирующего зондового микроскопа, совмещенного с устройством модификации поверхности объекта, осуществляется следующим образом. Закрепляют носитель объекта 8 с объектом 9 на держателе 7. Закрепляют зонд 13 в модуле подвижки 12. Используя модуль объекта 5, опускают объект 9 в сторону ножа 3 и производят срез объекта 9, формируя поверхность 10. После этого объект 9 поднимают в верхнее положение. Используя модуль подвижки 12, осуществляют перемещение зонда по координате X и сближение зонда 13 с поверхностью 10 объекта 9. Далее, используя пьезосканер 6, производят сканирование поверхности 10 относительно зонда 13 и измерение топографии поверхности 10 с составлением карты поверхности объекта.
Предложенный способ измерения поверхности объекта в режиме сканирующего зондового микроскопа реализуется посредством того, что подготовку поверхности 10 объекта 9 дополняют периодическим перемещением поверхности 10 объекта 9 относительно ножа 3. Это перемещение может осуществляться пьезосканером 6.
В одном из вариантов периодическое перемещение поверхности 10 объекта 9 осуществляют по второй координате Y. Диапазоны перемещения стандартных пьезосканеров, используемых в сканирующей зондовой микроскопии, по координатам сканирования составляют величины порядка 100 мкм. В данном случае это координаты Y, Z. При периодическом перемещении поверхности 10 объекта 9 по второй координате Y в момент среза объекта 9 происходят дополнительные разрывы тела объекта 9 по направлению, перпендикулярному основному перемещению режущей кромки 4 ножа 3 по координате Z. Таким образом, основное относительное перемещение реза режущей кромки 4 по координате Z дополняется относительным перемещением режущей кромки 4 в «режиме пилы».
В одном из вариантов периодическое перемещение поверхности 10 объекта 9 по второй координате Y осуществляют с постоянной амплитудой и постоянной частотой. Это целесообразно в том случае, если известно, что объекты однородны. Для пластичных объектов и материалов, таких как полистирол, целесообразно устанавливать максимальные амплитуды в диапазоне 250-500 нм и минимальные частоты 1-10 кГц периодического перемещения поверхности 10 объекта 9. Для твердых объектов и материалов, таких как гидроксиапатит, целесообразно устанавливать минимальные амплитуды в диапазоне 100-200 нм и максимальные частоты 10-50 кГц периодического перемещения поверхности 10 объекта 9.
В одном из вариантов периодическое перемещение поверхности 10 объекта 9 по второй координате Y осуществляют с постоянной амплитудой и переменной частотой. Это целесообразно в том случае, если известно, что твердые объекты неоднородны по твердости. Например, образцы частиц гидроксиапатита, фиксированных в биополимерных матрицах [6], имеют повышенную твердость внутренних зон. В этом случае следует повышать частоту периодического перемещения поверхности 10 объекта 9 в области реза зон, содержащих твердые частицы, до 20-30 кГц. Амплитуду целесообразно устанавливать в диапазоне 100-200 нм.
В одном из вариантов периодическое перемещение поверхности 10 объекта 9 по второй координате Y осуществляют с переменной амплитудой и постоянной частотой. Это целесообразно в том случае, если известно, что упругие объекты неоднородны по упругости. Например, образцы биологических тканей, залитые в эпоксидную смолу [7, 8], имеют повышенную упругость наружной поверхности (эпоксидная смола) и вязкую середину (биоткань). В этом случае следует повышать в диапазоне 250-500 нм амплитуду периодического перемещения поверхности 10 объекта 9 в области реза наружной его поверхности. Частоту целесообразно устанавливать в диапазоне 10-20 кГц.
В одном из вариантов периодическое перемещение поверхности 10 объекта 9 по второй координате Y осуществляют с переменной амплитудой и переменной частотой. Это целесообразно в том случае, если известно, что объекты неоднородны по твердости, упругости и вязкости. Например, образцы биополимерных матриксов с биологическими клетками, зафиксированные в металлических (например, золотых или медных [9]) капиллярах, имеют повышенную твердость наружной поверхности и вязкую или упругую середину. В этом случае следует понижать в диапазоне 50-100 нм амплитуду периодического перемещения поверхности 10 объекта 9 в области реза наружной его поверхности. Частоту целесообразно повышать в диапазоне 15-30 кГц в области реза наружной его поверхности. При осуществлении реза срединной части таких объектов в этой области следует повышать амплитуду периодического перемещения поверхности 10 объекта 9 в диапазоне 250-500 нм. Частоту целесообразно понижать в диапазоне 5-10 кГц.
В одном из вариантов периодическое перемещение поверхности 10 объекта 9 осуществляют по третьей координате Z. Это целесообразно, в первую очередь, для твердых объектов. Амплитуда периодического перемещения поверхности 10 объекта 9 может быть в диапазоне 10-100 нм, а частоты в диапазоне 50-100 кГц. Для упругих объектов также возможен этот режим. В этом случае амплитуда периодического перемещения поверхности 10 объекта 9 может быть в диапазоне 100-500 нм, а частоты в диапазоне 10-20 кГц.
В одном из вариантов периодическое перемещение поверхности 10 объекта 9 осуществляют по второй координате Y и по третьей координате Z.
В одном из вариантов периодическое перемещение поверхности 10 объекта 9 осуществляют по первой координате X. В этом случае в процессе реза объекта 9 периодическое перемещение поверхности 10 осуществляется в импульсном режиме на величину 10-500 нм в сторону зонда 13, формируя периодические структуры выступами или углублениями на поверхности 10.
В одном из вариантов периодическое перемещение поверхности 10 объекта 9 осуществляют после составления карты физических свойств поверхности 10 объекта 9 и в соответствии с неоднородностью физических свойств поверхности 10 объекта 9. В одном из вариантов измерения зондом 13 поверхности объекта 9 могут осуществляться в режиме измерения локальной упругости. [10] Таким образом, при очередном срезе объекта 9 можно корректировать амплитуду и частоту периодического перемещения в соответствии с картой физических свойств в виде измеренной локальной упругости поверхности 10.
В одном из вариантов периодическое перемещение поверхности 10 объекта 9 осуществляют после составления карты морфологии поверхности 10 объекта 9 и в соответствии с неоднородностью морфологии поверхности 10 объекта 9. Это целесообразно, например, для микро- и нанопористых объектов с размерами пор в диапазоне от 10 до 500 нм и неоднородной степенью пористости. После составления карты морфологии поверхности объекта путем измерения в режиме сканирующего зондового микроскопа на карте могут быть выделены области пор большего и меньшего диаметра. При очередном срезе объекта 9 можно корректировать амплитуду и частоту периодического перемещения в соответствии с измеренным локальным размером пор. В данном случае целесообразно устанавливать амплитуду периодического перемещения объекта 9 по второй координате Y на уровне среднего размера пор в срезаемой области, а частоту периодического перемещения устанавливать как отношение скорости относительного перемещения объекта 9 и ножа 3 при срезе к среднему размеру пор в срезаемой области.
В одном из вариантов периодическое перемещение поверхности 10 объекта 9 дополняют управляемым перемещением поверхности 10 объекта 9 по первой координате X в соответствии с морфологией поверхности 10 объекта 9. Иногда из-за недостаточной жесткости крепления объекта 9 и самого объекта 9 на его поверхности формируется волнообразный профиль, параллельный режущей кромке 4. [11] В этом случае после среза измеряют зондом 13 этот профиль и на следующем срезе поверхность 10 объекта 9 смещают по первой координате X противофазно этому профилю.
То, что подготовку поверхности 10 объекта 9 дополняют периодическим перемещением поверхности 10 объекта 9 относительно ножа 3, уменьшает усилие реза, улучшает качество срезанной поверхности 10 объекта 9 и соответственно повышает качество зондовых измерений за счет уменьшения влияния неровностей срезанной поверхности 10 объекта 9 на процесс измерений. При этом появляется также возможность формирования более тонких срезов за счет минимизации неровностей среза.
То, что периодическое перемещение поверхности 10 объекта 9 осуществляют по второй координате Y, одновременно с улучшением качества срезанной поверхности 10 объекта 9 позволяет дольше сохранять режущую кромку 4, в первую очередь, при резке твердых объектов за счет ее периодических перемещений по направлению, перпендикулярному направлению реза.
То, что периодическое перемещение поверхности 10 объекта 9 по второй координате Y осуществляют с постоянной амплитудой и постоянной частотой, положительно влияет на качество срезанной поверхности 10 объекта 9, имеющего одинаковые характеристики твердости и упругости по всему объему объекта 9.
То, что периодическое перемещение поверхности 10 объекта 9 по второй координате Y осуществляют с постоянной амплитудой и переменной частотой, положительно влияет на качество срезанной поверхности твердых объектов, имеющих различные характеристики твердости по всему объему. В зоне повышенной твердости объекта 9 целесообразно повышать частоту периодического перемещения поверхности 10 объекта 9, что также дольше сохраняет режущую кромку 4.
То, что периодическое перемещение поверхности 10 объекта 9 по второй координате Y осуществляют с переменной амплитудой и постоянной частотой, положительно влияет на качество срезанной поверхности пластичных объектов, имеющих различные характеристики упругости и вязкости по всему объему. В зонах повышенной вязкости объектов целесообразно повышать амплитуду периодического перемещения поверхности 10 объекта 9, добиваясь разрыва упругих тканей.
То, что периодическое перемещение поверхности 10 объекта 9 по второй координате Y осуществляют с переменной амплитудой и переменной частотой, положительно влияет на качество срезанной поверхности объектов, имеющих различные характеристики твердости, упругости и вязкости по всему объему.
То, что периодическое перемещение поверхности 10 объекта 9 осуществляют по третьей координате Z, положительно влияет на качество срезанной поверхности хрупких объектов и позволяет дольше сохранять режущую кромку 4 за счет ее периодических перемещений по направлению реза, которые уменьшают усилие реза.
То, что периодическое перемещение поверхности 10 объекта 9 осуществляют по второй координате Y и по третьей координате Z, положительно влияет на качество срезанной поверхности объектов и позволяет дольше сохранять режущую кромку 4 за счет ее периодических перемещений по направлению реза и перпендикулярно ему.
То, что периодическое перемещение поверхности 10 объекта 9 осуществляют по первой координате X, позволяет создавать на поверхности 10 объекта 9 координатную сетку выступами или углублениями на поверхности 10, которая может упрощать запоминание и поиск локальных фрагментов на поверхности 10 объекта 9.
То, что периодическое перемещение поверхности 10 объекта 9 осуществляют после составления карты физических свойств поверхности 10 объекта 9 и в соответствии с неоднородностью физических свойств поверхности 10 объекта 9, положительно влияет на качество срезанной поверхности объектов и позволяет дольше сохранять режущую кромку 4 за счет учета неоднородности физических свойств объектов и в первую очередь их твердости.
То, что периодическое перемещение поверхности 10 объекта 9 осуществляют после составления карты морфологии поверхности 10 объекта 9 и в соответствии с неоднородностью морфологии поверхности 10 объекта 9 и дополняют управляемым перемещением поверхности 10 объекта 9 по первой координате X, позволяет компенсировать, например, волнообразную неровность волнообразным противофазным перемещением поверхности 10 объекта 9 по первой координате X.
Литература
1. Патент RU 2389032. Сканирующий зондовый микроскоп, совмещенный с устройством модификации поверхности объекта 10.05.2010.
2. Патент RU 2545471. Способ исследования трехмерных структур. 27.03.2015.
3. Патент US 5299481. Carrier arm seal for a microtome of ultramicrotome. 05.04.1994.
4. Патент US 2009183613. Micromanipulator for a cryomicrotome. 23.07.2009.
5. A.E. Efimov, H. Gnaegi, R. Schaller, W. Grogger, F. Hofer and N.B. Matsko, Analysis of native structure of soft materials by cryo scanning probe tomography, Soft Matter, 2012, 8, p.9756-9760.
6. M.M. Moisenovich, A. Yu. Arkhipova, A.A. Orlova, M.S Drutskaya, S.V. Volkova, S.E. Zacharov, I.I. Agapov, M.R Kirpichnikov, Composite Scaffolds Containing Silk Fibroin, Gelatin, and Hydroxyapatite for Bone Tissue Regeneration and 3D Cell Culturing, Acta Naturae. 2014; 6(1), p. 96-101.
7. K. Nagashima, J. Zheng, D. Parmiter, A. K. Patri, Biological Tissue and Cell Culture Specimen Preparation for ТЕМ Nanoparticle Characterization, Characterization of Nanoparticles Intended for Drug Delivery Methods in Molecular Biology Vol. 697, 2011, p. 83-91.
8. N. Matsko, M. Mueller, AFM of biological material embedded in epoxy resin. Journal of Structural Biology, 2004, 146, p. 334-343.
9. S. Yakovlev, К.H. Downing, Freezing in Sealed Capillaries for Preparation of Frozen Hydrated Sections, J Microsc, 2011, 244 (3), p. 235-247.
10. S Banerjee, N Gayathri, S R Shannigrahi, S Dash, А К Tyagi, Baldev Raj, Imaging distribution of local stiffness over surfaces using atomic force acoustic microscopy, J. Phys. D: Appl. Phys., 2007, 40, p. 2539.
11. H. Sitte, Ultramikrotomie - Haufige Fehler und Probleme., "Supplement Mikroskopie/Elektronenmikroskopie Janner 1982", GIT-Verlag Ernst Giebeler, Darmstadt, p. 9-32.
Неорганический люминесцирующий материал для твердотельных источников белого света
Способ получения суспензий гидрогелевых микрочастиц с заданными размерами на основе рекомбинантного белка паутины и их применение
Способ получения биодеградируемого композитного матрикса на основе регенерированного фиброина шелка bombyx mori и его применение
Объект с повышенной устойчивостью на воде
Способ подготовки и измерения поверхности крупногабаритного объекта сканирующим зондовым микроскопом
Композиционный люминесцирующий материал для твердотельных источников белого света
Способ трансплантации сплошного свободного полнослойного аутологичного кожного лоскута в эксперименте
Сканирующий зондовый микроскоп, совмещенный с космическим аппаратом
Способ титрования групповых антител системы аво
Способ гемодинамической разгрузки левого желудочка при проведении периферической вено-артериальной экстракорпоральной мембранной оксигенации
Неорганический люминесцирующий материал для твердотельных источников белого света
Способ получения суспензий гидрогелевых микрочастиц с заданными размерами на основе рекомбинантного белка паутины и их применение
Способ получения биодеградируемого композитного матрикса на основе регенерированного фиброина шелка bombyx mori и его применение
Объект с повышенной устойчивостью на воде
Способ подготовки и измерения поверхности крупногабаритного объекта сканирующим зондовым микроскопом
Композиционный люминесцирующий материал для твердотельных источников белого света
Способ трансплантации сплошного свободного полнослойного аутологичного кожного лоскута в эксперименте
Сканирующий зондовый микроскоп, совмещенный с космическим аппаратом
Способ титрования групповых антител системы аво
Способ гемодинамической разгрузки левого желудочка при проведении периферической вено-артериальной экстракорпоральной мембранной оксигенации

