Результат интеллектуальной деятельности: МНОГОКАНАЛЬНОЕ СЕЙСМИЧЕСКОЕ УСТРОЙСТВО ОБНАРУЖЕНИЯ И КЛАССИФИКАЦИИ НАРУШИТЕЛЕЙ
Вид РИД
Изобретение
Изобретение относится к техническим средствам обнаружения человека, определения его местоположения в контролируемой зоне по создаваемым им сейсмическим колебаниям.
Известен адаптивный сейсмический корреляционный пеленгатор объектов [патент РФ №2248015 C1, МПК7 G01V 1/16, G01S 3/80].
Недостатком известного пеленгатора является то, что он не обеспечивает требуемую вероятность обнаружения объектов, при этом определение направления движения объектов в контролируемой зоне ограничено только пеленгом.
Известно сейсмическое устройство и способ обнаружения проникновения человека через контур запрещенной зоны [патент РФ №2209467 C2, МПК7 G08B 13/16].
Недостатком известного устройства является то, что оно не обеспечивает определение параметров движения объектов в контролируемой зоне и, соответственно, имеет низкую вероятность обнаружения нарушителя.
Наиболее близким по технической сущности к заявляемому изобретению является выбранное в качестве прототипа сейсмическое устройство обнаружения и классификации объектов [патент РФ №2311665, МПК7 G01V 1/16].
Работа сейсмического устройства обнаружения и классификации объектов заключается в следующем.
Сейсмические колебания грунта, создаваемые под воздействием подвижных объектов в контролируемой зоне, преобразовываются сейсмопреобразователем в электрический сигнал, который подается на детектор сигнала, где по отношению уровня сигнала к уровню шума принимается решение об его наличии. Если отношение сигнал/шум не превышает заданного уровня, то наличие сигнала не определяется и питание на последующие блоки, находящиеся в режиме пониженного энергопотребления, не подается. Если отношение сигнал/шум больше заданного уровня, то наличие сигнала определяется и детектор передает решение о наличии сигнала в устройство контроля, которое переводит остальные устройства в рабочий режим. Сигнал усиливается в автоматическом регуляторе усиления и подвергается аналого-цифровому преобразованию. Далее цифровой сигнал поступает параллельно на частотный преобразователь, где проводится модифицированное преобразование Фурье, направленное на выделение классификационных признаков, которыми являются значения частотных составляющих амплитудного спектра, и частотно-временной преобразователь, предназначенный для получения вторых классификационных признаков, которыми являются значения дисперсии вейвлет-коэффициентов. Для распознавания объектов, имеющих ярко выраженный импульсный характер воздействия на грунт и обладающих схожими частотными спектрами, используется определенное количество частотных признаков.
Известное устройство позволяет с вероятностью правильного распознавания 0,97 при доверительной вероятности 0,8 распознать объекты классов «Человек», «Группа людей», «Крупное животное», «Грузовой автомобиль», «Легковой автомобиль». Однако не позволяет осуществлять определение параметров движения объектов и идентифицировать объект как нарушителя, тем самым не обеспечивает требуемую вероятность обнаружения нарушителя.
Целью изобретения является повышение вероятности обнаружения нарушителя в контролируемой зоне.
Цель достигается тем, что в известное устройство, содержащее сейсмопреобразователь, который подключен ко входу детектора сигнала и через автоматический регулятор усиления соединен со входом аналого-цифрового преобразователя, блок анализа, блок индикации, память данных эталонных областей, последовательно соединенные частотный преобразователь и устройство предварительного решения, при этом вход частотного преобразователя соединен со входом частотно-временного преобразователя, выход которого через линейку вычислителей дисперсии подключен ко входу буфера накопления, согласно изобретению введены Q сейсмоприемников, J обнаружителей нарушителя и пульт контроля, при этом каждый q-й, q=1(1)Q, сейсмоприемник содержит сейсмопреобразователь, детектор сигнала, автоматический регулятор усиления, аналого-цифровой преобразователь, блок классификации и устройство контроля сейсмоприемника, причем блок классификации, выход которого является выходом q-го, q=1(1)Q, сейсмоприемника, подключен к выходу аналого-цифрового преобразователя, а первый выход детектора сигнала через устройство контроля сейсмоприемника соединен со вторым входом автоматического регулятора усиления, при этом вход сейсмопреобразователя является входом q-го, q=1(1)Q, сейсмоприемника и входом устройства в целом, причем каждый j-й, j=1(1)J, обнаружитель нарушителя содержит блок анализа, вычислитель задержек, память данных устройства вычисления местоположения, устройство вычисления местоположения, первый приемопередатчик, устройство управления обнаружителем нарушителя, причем первая группа входов j-го, j=1(1)J, обнаружителя нарушителя, которой является группа входов блока анализа, подключена к выходам блоков классификации, а вторая группа входов j-го, j=1(1)J, обнаружителя нарушителя, которой является группа входов вычислителя задержек, подключена ко вторым выходам детектора сигнала, при этом выход блока анализа через устройство управления обнаружителем нарушителя соединен с первым входом первого приемопередатчика, ко второму входу которого подсоединен выход пульта контроля, причем первый выход первого приемопередатчика подключен ко второму входу устройства управления обнаружителем нарушителя, а второй выход первого приемопередатчика является j-м, j=1(1)J, выходом обнаружителя нарушителя и соединен со входом пульта контроля, при этом выход вычислителя задержек через устройство вычисления местоположения соединен с третьим входом устройства управления обнаружителем нарушителя, а второй выход устройства вычисления местоположения подключен ко входу памяти данных устройства вычисления местоположения, выход которой соединен со вторым входом устройства вычисления местоположения, при этом пульт контроля содержит блок индикации, второй приемопередатчик, устройство управления пульта контроля, органы управления пульта контроля, причем J выходов второго приемопередатчика соединены со входами J первых приемопередатчиков, а J входов второго приемопередатчика подключены к выходам J первых приемопередатчиков, при этом выход второго приемопередатчика соединен с первым входом устройства управления пульта контроля, ко второму входу которого подключены органы управления пульта контроля, при этом первый выход устройства управления пульта контроля подключен к (J+1)-му входу второго приемопередатчика, а второй выход устройства управления пульта контроля соединен со входом блока индикации, выход которого является выходом пульта контроля и выходом устройства в целом.
Поставленная цель достигается также тем, что блок классификации содержит частотный преобразователь, частотно-временной преобразователь, устройство предварительного решения, линейку вычислителей дисперсии, память данных эталонных областей, буфер накопления и решающее устройство, причем первый вход решающего устройства подключен к выходу устройства предварительного решения, второй вход решающего устройства подключен к выходу буфера накопления, а третий вход решающего устройства подключен к выходу памяти данных эталонных областей, вход которой соединен с первым выходом решающего устройства, второй выход которого является выходом блока классификации.
Сопоставительный анализ технического решения с сейсмическим устройством обнаружения и классификации объектов, выбранным в качестве прототипа, показывает, что заявляемое многоканальное сейсмическое устройство обнаружения и классификации нарушителей отличается новыми элементами, такими как: Q сейсмоприемников, J обнаружителей нарушителя, пульт контроля, блок классификации, устройство контроля сейсмоприемника, вычислитель задержек, память данных устройства вычисления местоположения, устройство вычисления местоположения, первый приемопередатчик, устройство управления обнаружителем нарушителя, второй приемопередатчик, органы правления пульта контроля, решающее устройство.
Таким образом, заявляемое техническое решение соответствует критерию изобретения «новизна».
Анализ известных технических решений в исследуемой и смежных областях позволяет сделать вывод о том, что введенные элементы известны. Однако введение их в многоканальное сейсмическое устройство обнаружения и классификации объектов придает этому устройству новые свойства. Введенные элементы функционируют таким образом, что позволяют повысить вероятность обнаружения нарушителя.
Таким образом, техническое решение соответствует критерию "изобретательский уровень", т.к. оно для специалиста явным образом не следует из уровня техники.
Техническое решение может быть использовано для обнаружения нарушителей и определения их местоположения в контролируемой зоне.
Таким образом, изобретение соответствует критерию "промышленная применимость".
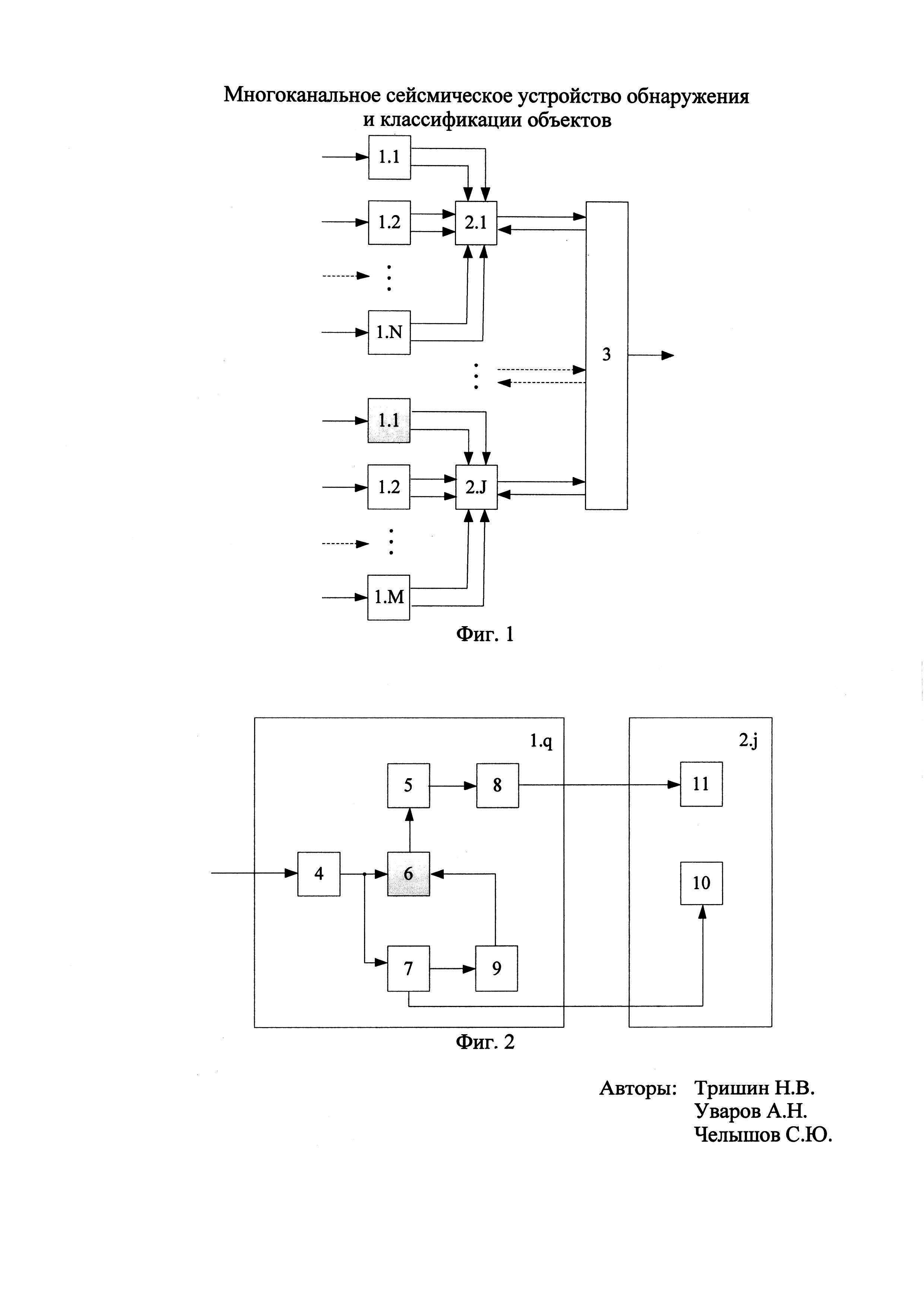
На фиг.1 представлена структурная блок-схема многоканального сейсмического устройства обнаружения и классификации нарушителей;
на фиг.2 - блок-схема сейсмоприемника;
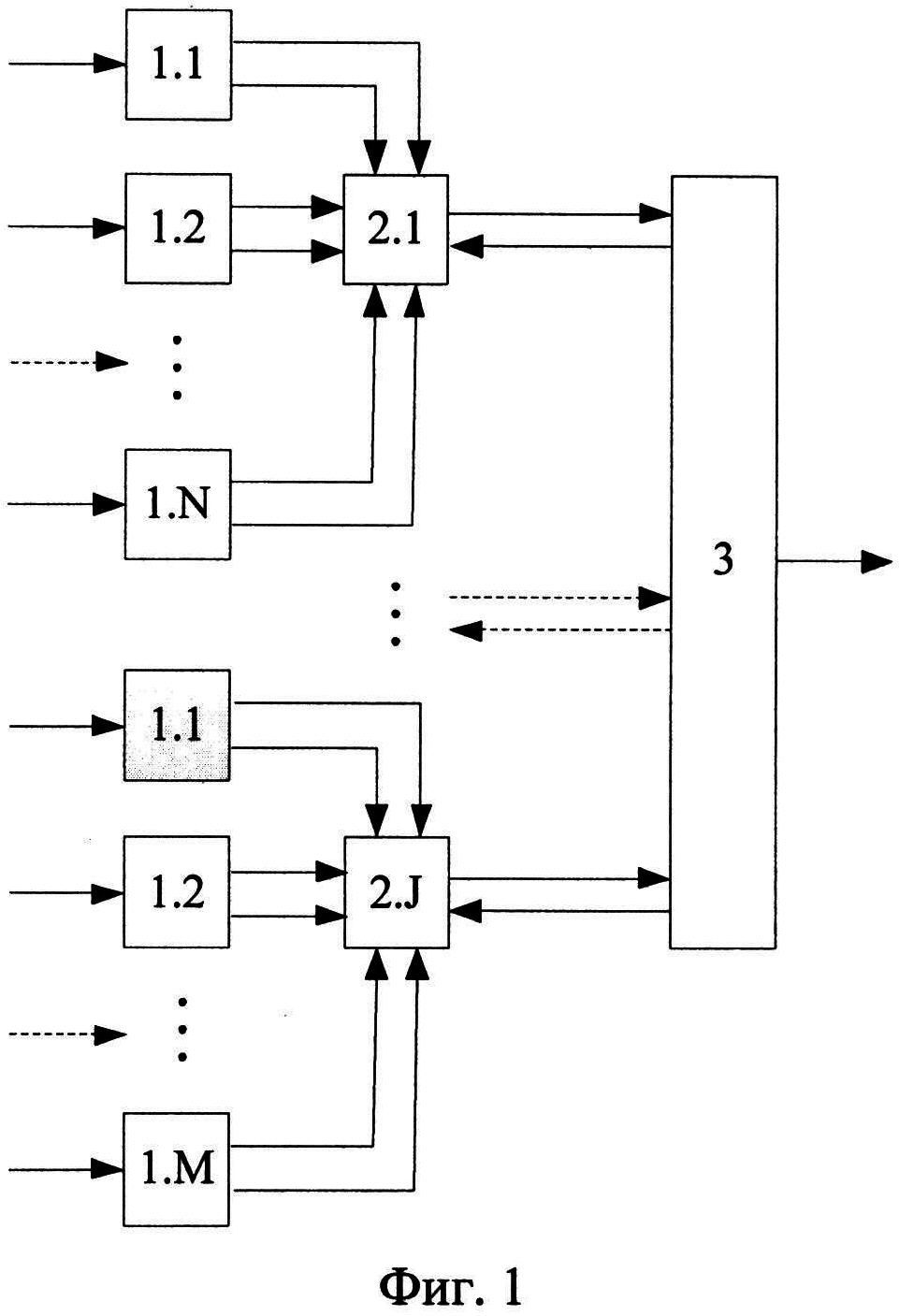
на фиг.3 - блок-схема обнаружителя нарушителя;
на фиг.4 - блок-схема пульта контроля;
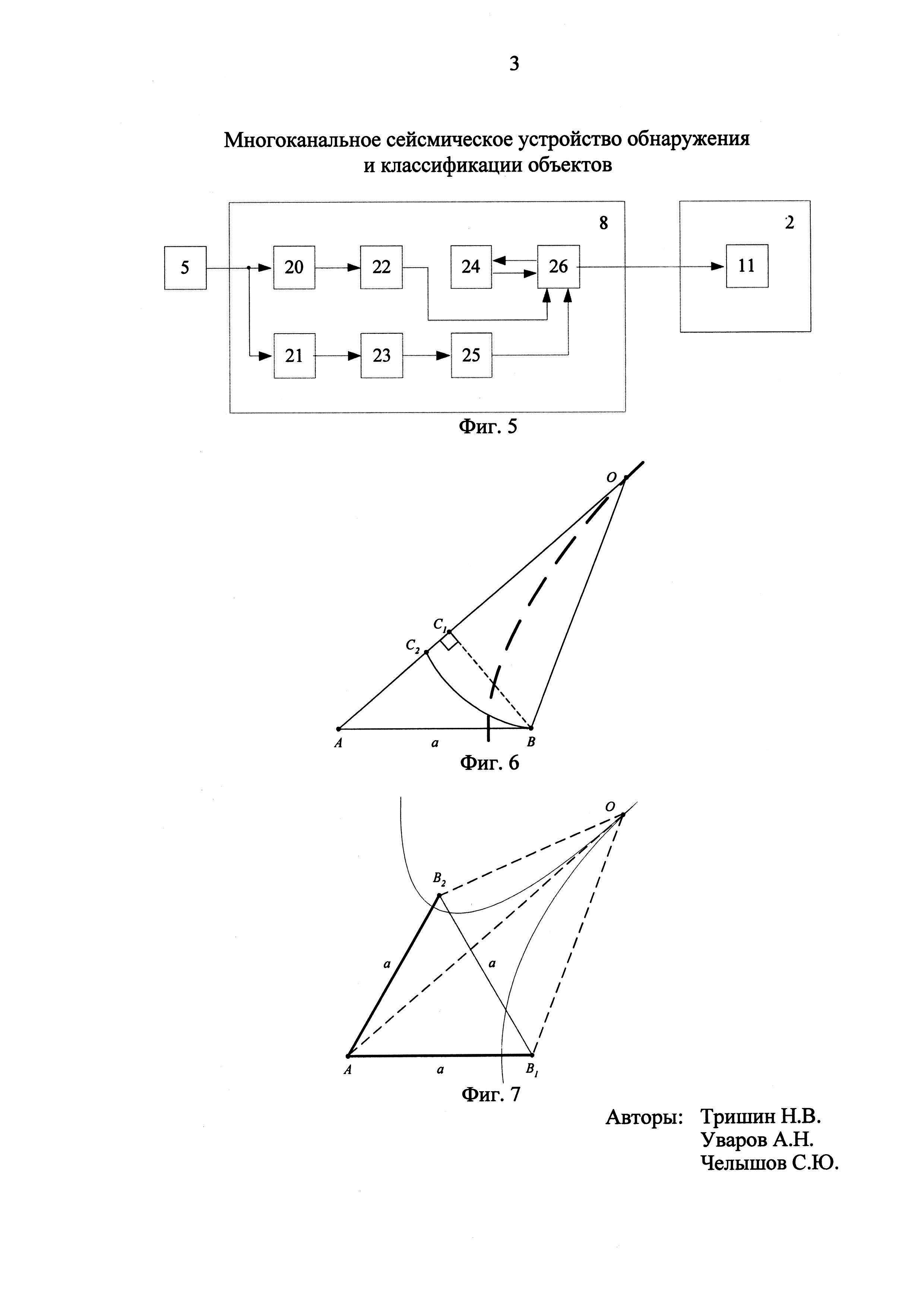
на фиг.5 - блок-схема блока классификации;
на фиг.6 - схемы пеленгования объектов фазоразностным и разностно-дальномерным методами;
на фиг.7 - схема определения местоположения объектов, реализующая разностно-дальномерный метод.
Многоканальное сейсмическое устройство обнаружения и классификации нарушителей (фиг. 1) содержит Q сейсмоприемников 1, J обнаружителей 2 нарушителя, пульт 3 контроля, сейсмопреобразователь 4, аналого-цифровой преобразователь 5, автоматический регулятор усиления 6, детектор 7 сигнала, блок 8 классификации, устройство 9 контроля сейсмоприемника, вычислитель 10 задержек, блок 11 анализа, память 12 данных устройства вычисления местоположения, устройство 13 вычисления местоположения, первый приемопередатчик 14, устройство 15 управления обнаружителем нарушителя, второй приемопередатчик 16, устройство 17 управления пульта контроля, блок 18 индикации, органы управления 19 пульта контроля, частотный преобразователь 20, частотно-временной преобразователь 21, устройство 22 предварительного решения, линейку вычислителей дисперсии 23, память 24 данных эталонных областей, буфер 25 накопления, решающее устройство 26, при этом сейсмопреобразователь 4 подключен ко входу детектора 7 сигнала и через автоматический регулятор усиления 6 соединен со входом аналого-цифрового преобразователя 5, причем частотный преобразователь 20 и устройство 22 предварительного решения соединены последовательно, а вход частотного преобразователя 20 соединен со входом частотно-временного преобразователя 21, выход которого через линейку вычислителей дисперсии 23 подключен ко входу буфера 25 накопления, при этом каждый q-й, q=1(1)Q, сейсмоприемник 1 содержит сейсмопреобразователь 4, детектор 7 сигнала, автоматический регулятор усиления 6, аналого-цифровой преобразователь 5, блок 8 классификации и устройство 9 контроля сейсмоприемника, причем блок 8 классификации, выход которого является выходом q-го, q=1(1)Q, сейсмоприемника 1, подключен к выходу аналого-цифрового преобразователя 5, а первый выход детектора 7 сигнала через устройство 9 контроля сейсмоприемника соединен со вторым входом автоматического регулятора усиления 6, при этом вход сейсмопреобразователя 4 является входом q-го, q=1(1)Q, сейсмоприемника 1 и входом устройства в целом, причем каждый j-й, j=1(1)J, обнаружитель нарушителя 2 содержит блок 11 анализа, вычислитель 10 задержек, память 12 данных устройства вычисления местоположения, устройство 13 вычисления местоположения, первый приемопередатчик 14, устройство 15 управления обнаружителем нарушителя, причем первая группа входов j-го, j=1(1)J, обнаружителя нарушителя 2, которой является группа входов блока 11 анализа, подключена к выходам блоков 8 классификации, а вторая группа входов j-го, j=1(1)J, обнаружителя нарушителя 2, которой является группа входов вычислителя 10 задержек, подключена ко вторым выходам детектора 7 сигнала, при этом выход блока 11 анализа через устройство 15 управления обнаружителем нарушителя соединен с первым входом первого приемопередатчика 14, ко второму входу которого подсоединен выход пульта 3 контроля, причем первый выход первого приемопередатчика 14 подключен ко второму входу устройства 15 управления обнаружителем нарушителя, а второй выход первого приемопередатчика 14 является j-м, j=1(1)J, выходом обнаружителя нарушителя 2 и соединен со входом пульта 3 контроля, при этом выход вычислителя 10 задержек через устройство 13 вычисления местоположения соединен с третьим входом устройства 15 управления обнаружителем нарушителя, а второй выход устройства 13 вычисления местоположения подключен ко входу памяти 12 данных устройства вычисления местоположения, выход которой соединен со вторым входом устройства 13 вычисления местоположения, при этом пульт 3 контроля содержит блок 18 индикации, второй приемопередатчик 16, устройство 17 управления пульта контроля, органы управления 19 пульта контроля, причем J выходов второго приемопередатчика 16 соединены со входами J первых приемопередатчиков 14, а J входов второго приемопередатчика 16 подключены к выходам J первых приемопередатчиков 14, при этом выход второго приемопередатчика 16 соединен с первым входом устройства управления пульта контроля, ко второму входу которого подключены органы управления 19 пульта контроля, при этом первый выход устройства 17 управления пульта контроля подключен к (J+1)-му входу второго приемопередатчика 16, а второй выход устройства 17 управления пульта контроля соединен со входом блока 18 индикации, выход которого является выходом пульта 3 контроля и выходом устройства в целом.
При этом блок 8 классификации (фиг. 5) содержит частотный преобразователь 20, частотно-временной преобразователь 21, устройство 22 предварительного решения, линейку вычислителей дисперсии 23, память 24 данных эталонных областей, буфер 25 накопления и решающее устройство 26, причем первый вход решающего устройства 26 подключен к выходу устройства 22 предварительного решения, второй вход решающего устройства 26 подключен к выходу буфера 25 накопления, а третий вход решающего устройства 26 подключен к выходу памяти 24 данных эталонных областей, вход которой соединен с первым выходом решающего устройства 26, второй выход которого является выходом блока 8 классификации.
Принцип работы многоканального сейсмического устройства обнаружения и классификации нарушителей состоит в следующем.
Сейсмические колебания грунта, создаваемые под воздействием перемещающегося в контролируемой зоне человека, в каждом из Q сейсмоприемников (СП) 1 преобразовываются с помощью сейсмопреобразователя (СПр) 4 в электрический сигнал, который подается на детектор сигнала (ДС) 7, где подвергается предварительному усилению и, по отношению уровня сигнала к уровню шума, принимается решение о наличии объекта в контролируемой зоне. Если отношение сигнал/шум не превышает трех, то наличие сигнала не определяется и питание на последующие блоки, находящиеся в режиме пониженного энергопотребления, не подается. Если отношение сигнал/шум больше трех, то наличие сигнала определяется и ДС 7, первый выход которого является первым выходом СП 1, передает решение о наличии сигнала в устройство контроля СП (УКСП) 9, которое переводит остальные устройства СП в рабочий режим. Сигнал усиливается в автоматическом регуляторе усиления (АРУ) 6 и подвергается аналого-цифровому преобразованию в аналого-цифровом преобразователе (АЦП) 5. Далее цифровой сигнал поступает параллельно на частотный преобразователь (ЧП) 20, где осуществляется модифицированное преобразование Фурье, направленное на выделение первой группы классификационных признаков, которыми являются значения частотных составляющих амплитудного спектра, и частотно-временной преобразователь (ЧВП) 21, предназначенный для получения второй группы классификационных признаков, которыми являются значения дисперсий вейвлет-коэффициентов.
Для распознавания объектов трех классов, имеющих ярко выраженный импульсный характер воздействия на грунт и обладающих схожими частотными спектрами («Человек», «Группа людей», «Крупное животное»), используется количество частотных признаков NF=25. При увеличении числа классов системы распознавания, с целью уменьшения вероятности ошибочных решений, надо расширять словарь признаков [Горелик А.Л. Методы распознавания: Учеб. пособие для вузов / А.Л. Горелик, В.А. Скрипкин. - 4-е изд., испр. - М.: Высш. шк., 2004. с. 262]. Для дальнейшего расширения алфавита классов необходимо увеличение числа используемых частотных составляющих.
Вычисление значений частотных признаков Mi в реальном масштабе времени проводится по формуле:

где Xn(k) - значения амплитуд составляющих частотного спектра, усредняемых в l-м частотном диапазоне (l=1…L), содержащем Z составляющих;
S(n) - значение n-го отсчета оцифрованного сейсмического сигнала;
 - значения сумм базисных функций.
- значения сумм базисных функций.
Значения частотных признаков Ml поступают в устройство предварительного решения (УПР) 22, где они используются для вычисления меры близости dl(S(n),Ai) к эталонам распознаваемых классов по формуле

где  - весовой коэффициент;
- весовой коэффициент;
 - математическое ожидание и дисперсия значений j-го частотного признака i-го класса соответственно.
- математическое ожидание и дисперсия значений j-го частотного признака i-го класса соответственно.
После вычисления меры близости di(Sl(n),Ai) в УПР 22 по критерию минимума значения выбираются два класса с сохранением информации о степени близости. Полученная информация поступает на первый вход решающего устройства (РУ) 26.
Для формирования признаков на основе дисперсий вейвлет-коэффициентов в разных масштабах (m=1…11) в ЧВП 21 используется дискретное вейвлет-преобразование действительных чисел Добиши (Daubechies) с использованием "материнского" вейвлета второго порядка. Дисперсии коэффициентов преобразования на разных масштабах вычисляются в линейке вычислителей дисперсии 23 и поступают в буфер накопления 25. Выход буфера накопления связан со вторым входом РУ 26. Первый выход и третий вход РУ 26 связаны с памятью данных эталонных областей (ПДЭО) 24. Второй выход РУ 26 является вторым выходом СП 1. В РУ 26 на основании накопленных данных принимается решение о распознавании объекта на основе анализа только частотных признаков сейсмического сигнала. Для этого используется информация, хранящаяся в ПДЭО 24 и представляющая собой статистические данные о частоте появления пар классов с учетом степени близости, сведенные в матрицу вида
где pi,j=P(d(s(n),Ai)<d(s(n),Aj)|s(n)∈Ai);
 ;
;
N - количество классов, к которым может быть отнесен объект.
Распознавание объекта на основе анализа только частотных признаков сейсмического сигнала возможно, если выполняется условие, проверяемое в РУ 26.

При выполнении условия (4) выбирается класс Ai, если pi,j≠0, или класс Aj, если  . Информация о выбранном классе с выхода РУ 26 поступает на вход блока анализа (БА) 11, где на основе информации, поступившей с N СП 1, формируется соответствующее выбранному классу, сообщение и передается на устройство управления обнаружителем нарушителя (УУОН) 15.
. Информация о выбранном классе с выхода РУ 26 поступает на вход блока анализа (БА) 11, где на основе информации, поступившей с N СП 1, формируется соответствующее выбранному классу, сообщение и передается на устройство управления обнаружителем нарушителя (УУОН) 15.
При невыполнении условия (4) решение о классе объекта (его выборе из двух наиболее близких) принимается на основе данных, поступивших из ПДЭО 24.
Сигналы с первых выходов N СП 1 поступают в обнаружитель нарушителя (ОН) 2 на соответствующие входы вычислителя задержек (ВЗ) 10, где вычисляются значения разности Δt1, Δt2, Δtq-1 времени прихода сейсмической волны в точки расположения q СП 1 соответственно и передаются в устройство вычисления местоположения (УВМП) 13.
СП в общем случае (N>3) должны располагаться на местности не на одной прямой, или, в крайнем случае (N=3), в вершинах равностороннего треугольника со стороной а, образуя минимально необходимые две базы пеленгования. Пеленгование объекта в ближней зоне, представленное в патентной информации [например, патент РФ №2209467 C2, МПК7 G08B 13/16] и осуществляемое в прототипе [патент РФ №2209467 C2, МПК7 G08B 13/16], реализует фазоразностный метод. При этом предполагается, что источник сейсмических колебаний бесконечно удален (на фиг.6, OC1 ≠ OB) и фронт создаваемой им волны является плоским (на фиг.6, BC1 ⊥ OC1). В этом случае направление на объект вычисляется по формуле:

где a = AB - база пеленгования;
b*=AC1=Δt·νсв - расстояние (фиг.6), проходимое сейсмической волной, распространяющейся со скоростью νсв, от точки B до точки A за время Δt.
Достоинством такого способа пеленгования является простота реализации при достаточно точном определении направления. Однако принятые допущения не позволяют определить расстояние до объекта.
В реальных условиях расстояние до источника регистрируемых колебаний ограничено. Оно вместе с мощностью сейсмических возмущений, создаваемых человеком, и чувствительностью датчика определяет возможность обнаружения источника. Поэтому целесообразно использовать разностно-дальномерный метод пеленгования и местоопределения [А.Г. Сайбель. Основы теории точности радиотехнических методов местоопределения. - М.: Оборонгиз, 1958. 54 с.]. При этом предполагается, что фронт создаваемой источником сейсмических колебаний волны не является плоским (на фиг.6, OB=OC2) и направление на объект вычисляется по формуле

где b=AC2=Δt·νсв;
x=OC2=OB - расстояние до источника сейсмической волны.
При этом прерывистой линией на фиг. 2 показана линия положений источника колебаний, для каждой точки которой разность между расстояниями до точек A и B постоянна. Линия положений представляет собой гиперболу с фокусами в точках A и B, при этом b - разность фокальных радиусов OA и OB.
Определение местоположения человека в контролируемой зоне основано на вычислении точки пересечения линий положения (гипербол) двух баз пеленгования, образованных тремя датчиками, размещенными в вершинах равностороннего треугольника (фиг. 7).
Вычисление точки пересечения гипербол по заданным фокусным расстояниям a углу между их фокальными осями (между базами) и измеряемым временным задержкам Δt1, Δt2 требует больших аппаратных затрат. Существенно снизить эти затраты можно путем заблаговременного расчета и хранения в памяти данных устройства вычисления местоположения (ПДУВМ) 12 значений x и α, зависящих от Δt1 и Δt2.
Точность определения расстояния x зависит от точности вычисления задержек Δt1, Δt2 (для первой и второй баз соответственно) и скорости распространения сейсмической волны в грунте νсв, которая измеряется на завершающем этапе установки устройства обнаружения на местности.
Данные из устройства вычисления местоположения (УВМ) 13 передаются в УУОН 15, дополняются результатами распознавания источника сейсмических колебаний и посредством приемопередатчика с антенной (ПП) 14 на пульт контроля (ПК) 3. УУОН 15 также управляет режимами энергопотребления ОН 2, который до получения сигналов с СП 1 или команд управления с ПК 3 находится в дежурном режиме, когда ПП 14 включен на прием, а остальные устройства в ожидании сигналов с СП 1 находятся в режиме пониженного энергопотребления.
Данные, передаваемые по радиоканалу с J ОН 2 на ПК 3 (с J ПП 14 на многоканальный приемопередатчик (МПП) 16, а затем на устройство управления пульта контроля (УУПК) 17) отображаются при помощи блока индикации 18. При помощи органов управления 19 пульта контроля (ОУПК) выбираются необходимые команды управления, позволяющие переводить ОН 2 в различные режимы работы, например передача данных об обнаруженных объектах в реальном масштабе времени или накопление данных с фиксацией времени обнаружения до получения соответствующей команды управления, а также программная конфигурация контролируемой зоны. Работой ПК 3 управляет устройство управления ПК (УУПК) 17.
Таким образом, предлагаемое устройство позволяет с вероятностью 0,97 при доверительной вероятности 0,8 обнаружить объект и с вероятностью 0,85 классифицировать нарушителя в контролируемой зоне радиусом 25 м. Экспериментальные исследования показали, что заявляемое устройство позволяет определять местоположение человека с точностью до 1 метра по дальности и до 3 градусов по направлению, а также определить направление его движения.
Для технической реализации многоканального сейсмического устройства обнаружения и классификации нарушителей могут быть использованы сейсмический датчик отечественного производства типа СД-1 фирмы ООО «КБ Безопасности» и импортные процессор со встроенным аналого-цифровым преобразователем (АЦП) типа ATMegal28L-8MI - фирмы Atmel, программируемая пользователем интегральная схема типа XCR3128XL-7VQ100I - фирмы XILINX, жидкокристаллический индикатор FDCG128128A - фирмы FORDATA ELECTRONIC CO. LTD, а в качестве источников питания двух СП, ОН и ПК - литиевые элементы питания LS 26500 «SAFT» напряжением 3,6 В фирмы SAFT.
Отсечной клапан
Способ управления газотурбинным двигателем с форсажной камерой сгорания и система для его осуществления
Имитатор дорожный тренажёра транспортного средства
Способ управления газотурбинным двигателем и система для его осуществления
Система автоматизированного формирования прогноза погодных явлений
Способ удержания космического аппарата на геосинхронной 24-часовой орбите
Способ обнаружения шумоподобного сигнала
Система для определения скорости распространения и направления прихода ионосферного возмущения
Зеркальная антенна аэростатического летательного аппарата
Способ защиты группового объекта от воздействия средств поражения заградительным дисперсным образованием
Установка для решения четвёртого уравнения максвелла
Установка для решения третьего уравнения максвелла
Устройство для поддержания оптимальной температуры воздуха внутри обитаемых отделений военной гусеничной машины
Способ питания импульсной нагрузки от источника переменного напряжения и устройства для его осуществления (варианты)
Универсальная мобильная авиационная система беспилотных летательных аппаратов
Способ управления амплитудно-фазовым распределением на раскрыве фазированной антенной решетки
Способ оценки точности геометрической модели местности при ее автоматическом построении
Способ идентификации космических объектов искусственного происхождения в космическом пространстве
Вероятностная спутниковая система для мониторинга лесных пожаров
Способ обучения рулению на месте и устройство для его реализации

