Результат интеллектуальной деятельности: НАУЧНО-ИССЛЕДОВАТЕЛЬСКИЙ ТРЕНАЖЕРНЫЙ КОМПЛЕКС МОДЕЛИРОВАНИЯ ОПЕРАЦИЙ УПРАВЛЕНИЯ ЛЕДОВОЙ ОБСТАНОВКОЙ ВОКРУГ МОРСКИХ ПЛАВУЧИХ И ГРАВИТАЦИОННЫХ СООРУЖЕНИЙ
Вид РИД
Изобретение
Изобретение относится к области имитационной техники, а более конкретно к тренажерам морских операций и предназначен для совместного обучения экипажей судов обеспечения и добывающих платформ таким морским операциям, как буксировка крупногабаритных инженерных сооружений, в том числе в ледовых условиях, их позиционирование и установка в заданном месте, проведение грузобалластных операций, а также для разработки тактических приемов управления ледовой обстановкой (УЛО) у морских ледостойких сооружений при совместной работе нескольких ледокольных судов.
В настоящее время ведется интенсивная разработка месторождений углеводородов на Арктическом шельфе, что потребует производства новых добывающих платформ, вспомогательных ледокольных судов, танкеров ледового класса, а значит, потребуется подготовка новых экипажей и отработка новых технологий УЛО с нестандартными типами маневров.
Судоходство в ледовых условиях само по себе является непростой задачей, а при маневрировании и проведении различных операций в ледовых условиях вблизи добывающих сооружений риски возникновения аварийных ситуаций многократно повышаются, особенно при работе нескольких судов в ограниченной акватории. Поэтому подготовка экипажей судов к проведению совместных ледовых операций экономически гораздо выгоднее проводить на тренажерах, а не в реальных условиях. При этом можно проанализировать возникающие аварийные ситуации и разработать рекомендации по их предотвращению.
Известны и получили достаточно широкое внедрение отечественные тренажеры судоводителей с использованием полномасштабных моделей интегрированных мостиковых систем, имитацией функционирования судовых технических средств и визуализацией окружающей обстановки.
Наиболее близким к настоящему техническому решению по технической сущности является навигационный тренажерный комплекс Navi-Trainer Professional (http://www.transas.ru/products/NTPROIce?from=9990), включающий универсальный навигационный тренажер, содержащий инструкторские станции и учебные места в виде навигационных мостиков в любой конфигурации, и стационарные обслуживающие технические средства в виде серверных станций и автоматизированных рабочих мест, включающих средства виртуального моделирования внешних условий, систему разработки тренажерных баз данных и редактор математических моделей судов, (см. приложение: рекламный буклет Группы Транзас (выставка «Нева-2013», Санкт-Петербург, 2013 г). Основным недостатком известного тренажерного комплекса является недостаточная точность воспроизведения динамических параметров судна при моделировании его движения в ледовых условиях, а также трудоемкий и длительный процесс настройки тренажера под конкретное судно (подбор коэффициентов для различных режимов движения и пр.). При этом настройка современных тренажеров производится на основе данных, полученных при выполнении стандартных маневров при натурных или модельных испытаниях.
Задачей предполагаемого изобретения является повышение точности воспроизведения динамических параметров судна при моделировании его движения в морских ледовых условиях, в том числе при выполнении нестандартных маневров при различных режимах движения, и снижение трудозатрат на настройку тренажерного комплекса под конкретное судно.
Для этого в состав известного научно-исследовательского тренажерного комплекса моделирования операций управления ледовой обстановкой вокруг морских плавучих и гравитационных сооружений, включающего универсальный навигационный тренажер, содержащий инструкторские станции и учебные места в виде навигационных мостиков в любой конфигурации, и стационарные обслуживающие технические средства в виде серверных станций и автоматизированных рабочих мест, включающих средства виртуального моделирования внешних условий, систему разработки тренажерных баз данных и редактор математических моделей судов, по изобретению введен блок физического моделирования движения ледокольных судов в ледовом опытовом бассейне и выполняемых этими ледокольными судами операций управления ледовой обстановкой в моделируемых ледовых условиях. Указанный блок включает, по меньшей мере, одну самоходную беспроводную дистанционно-управляемую модель ледокольного судна, которая оснащена автономном движительно-рулевым комплексом и оборудована автономной системой измерения сил и моментов на указанном движительно-рулевом комплексе, автономной системой измерения кинематических и динамических параметров движения упомянутой модели, автономной системой определения положения модели в пространстве, модулем управления, обработки и регистрации результатов упомянутых измерений, связанным с указанными системами с одной стороны и с редактором математических моделей судов универсального навигационного тренажера с другой стороны. Также в указанный блок физического моделирования движения ледокольных судов входит расположенный на расстоянии и снабженный программным обеспечением беспроводной пульт управления дистанционно-управляемой моделью. При этом редактор математических моделей судов дополнен программным модулем импорта информации от блока физического моделирования.
При этом связь модуля управления, обработки и регистрации результатов измерений с редактором математических моделей судов универсального навигационного тренажера осуществляется посредством беспроводного соединения и/или переносных накопителей информации.
Введение в состав научно-исследовательского тренажерного комплекса блока физического моделирования позволяет оперативно получать требуемые данные для повышения точности воспроизведения динамических параметров судна при движении в морских ледовых условиях, в том числе при выполнении нестандартных маневров при любых режимах движения.
Дополнение редактора математических моделей судов программным модулем импорта информации от блока физического моделирования обеспечивает снижение трудозатрат на настройку тренажерного комплекса под конкретное судно за счет автоматизированного получения данных от блока физического моделирования, а также их автоматического ввода в математическую модель судна.
Связь блока физического моделирования с универсальным навигационным тренажером посредством беспроводного соединения и/или переносных накопителей информации позволяет каждому из них работать автономно и на значительном удалении друг от друга.
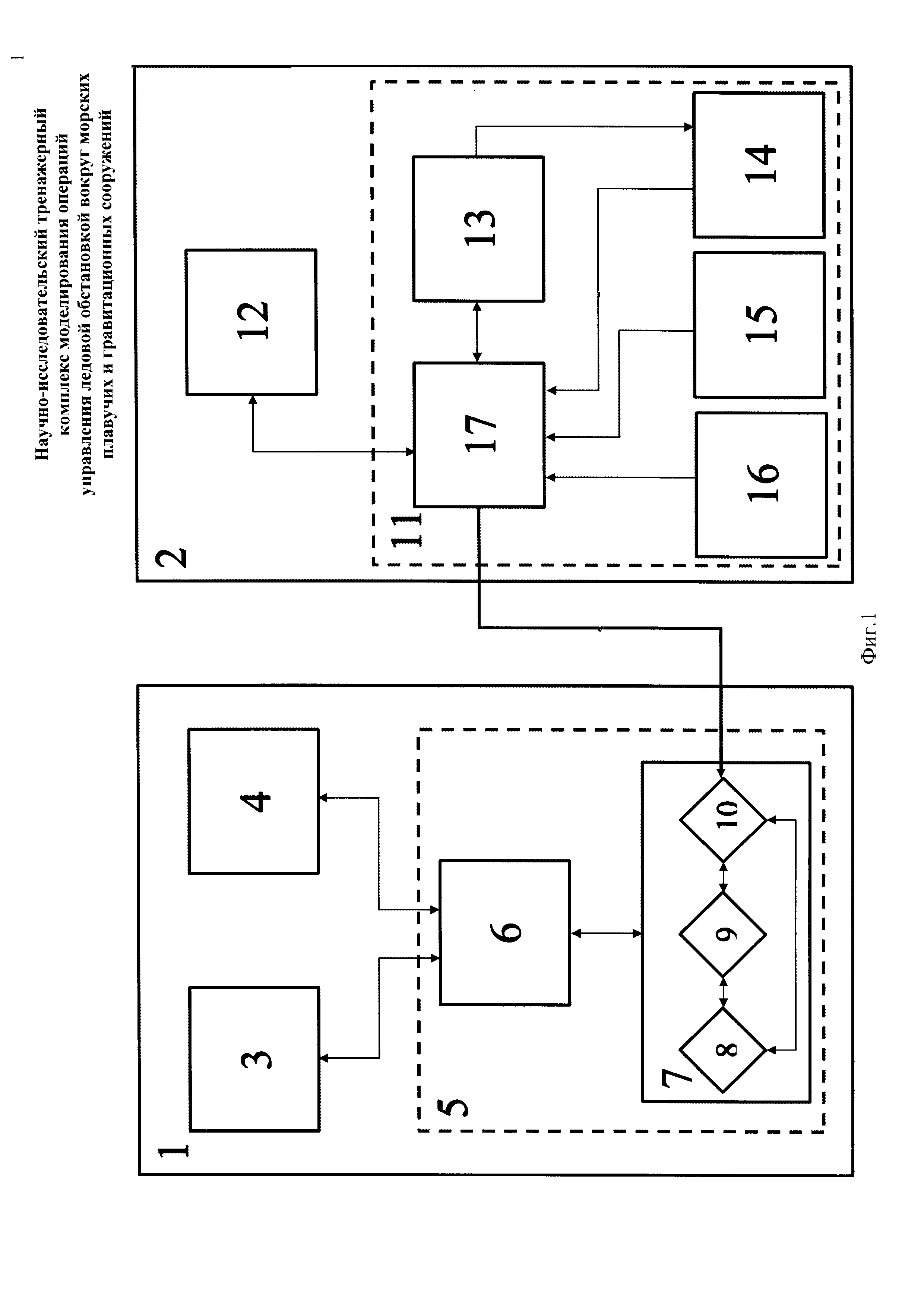
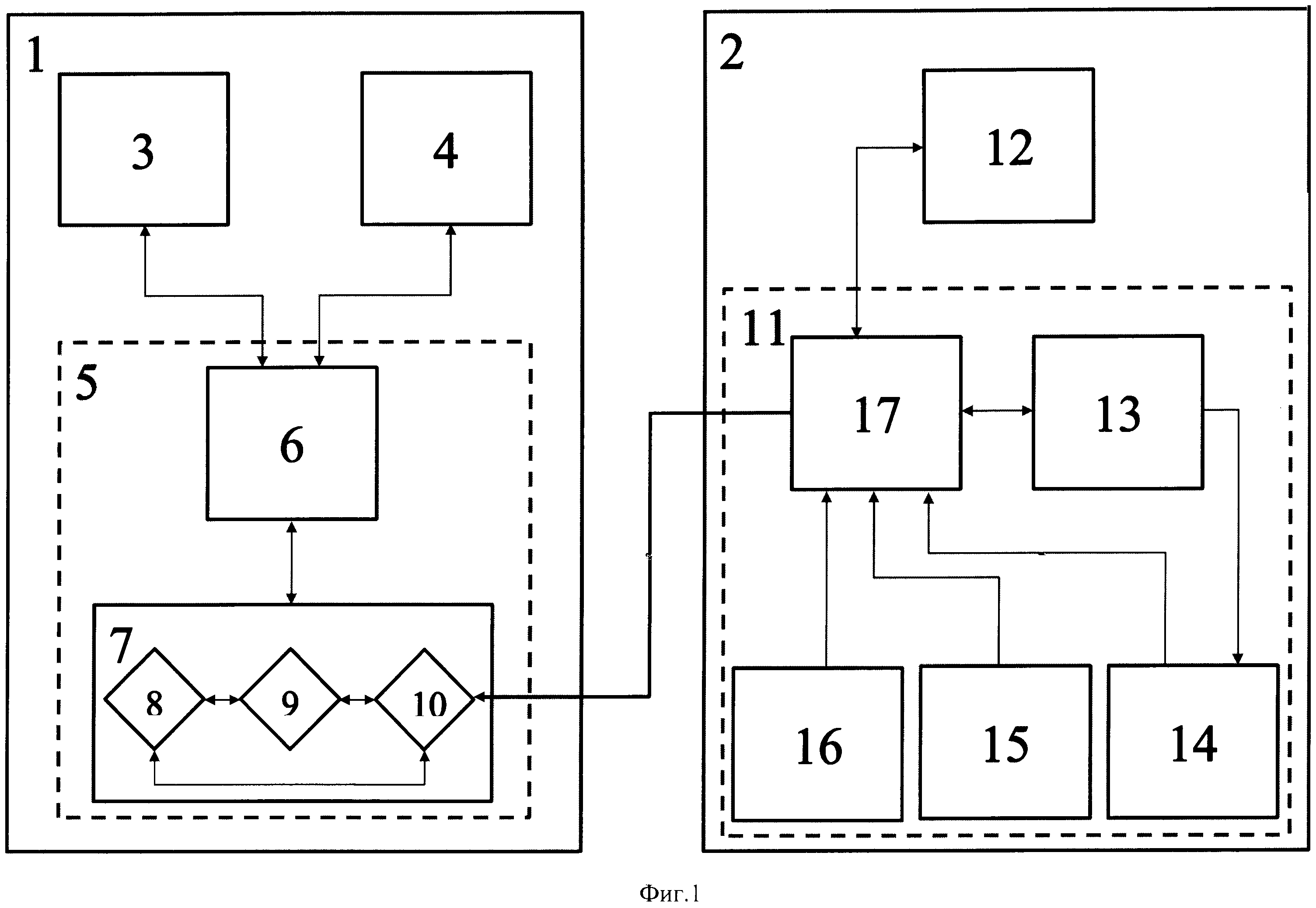
Сущность предполагаемого изобретения поясняется рисунком, на котором изображена блок-схема научно-исследовательского тренажерного комплекса моделирования операций управления ледовой обстановкой вокруг морских плавучих и гравитационных сооружений.
Предлагаемый научно-исследовательский тренажерный комплекс включает универсальный навигационный тренажер 1 и блок физического моделирования 2 движения ледокольных судов в ледовом опытовом бассейне и выполняемых этими ледокольными судами операций управления ледовой обстановкой в моделируемых ледовых условиях. Универсальный навигационный тренажер 1 содержит инструкторские станции 3 и учебные места 4 в виде навигационных мостиков в любой конфигурации, стационарные обслуживающие технические средства 5 в виде серверных станций 6 и автоматизированных рабочих мест 7, включающих средства виртуального моделирования внешних условий 8, систему разработки тренажерных баз данных 9 и редактор математических моделей судов 10.
Блок физического моделирования 2 включает по меньшей мере одну самоходную беспроводную дистанционно-управляемую модель ледокольного судна 11 и расположенный на расстоянии и снабженный программным обеспечением беспроводной пульт управления 12 моделью 11.
Модель ледокольного судна 11 оснащена автономным движительно-рулевым комплексом 13 и оборудована автономной системой измерения сил и моментов 14 на движительно-рулевом комплексе 13, автономной системой измерения кинематических и динамических параметров движения 15, автономной системой определения положения 16 в пространстве и модулем управления, обработки и регистрации результатов упомянутых измерений 17.
Модуль управления, обработки и регистрации результатов измерений 17 модели 11 блока физического моделирования 2 связан с редактором математических моделей судов 10 универсального навигационного тренажера 1 посредством беспроводного соединения Wi-Fi и/или переносных накопителей информации.
Эксплуатация научно-исследовательского тренажерного комплекса моделирования операций управления ледовой обстановкой осуществляется следующим образом.
В ледовом бассейне оператор с пульта дистанционного управления 12 управляет моделью 11. При этом все данные от движительно-рулевого комплекса 13, автономной системы измерения сил и моментов 14, автономной системы измерения кинематических и динамических параметров движения 15 и автономной системы определения положения 16 модели 11 в пространстве, поступают в модуль управления, обработки и регистрации результатов измерений 17, где сохраняются в файл. Параллельно модуль управления, обработки и регистрации результатов измерений 17 по беспроводному соединению Wi-Fi передает данные на пульт дистанционного управления 12, где оператор в реальном времени контролирует ход эксперимента.
После проведения эксперимента полученные данные от модуля управления, обработки и регистрации результатов измерений 17 блока физического моделирования 2 после предварительной подготовки передаются по беспроводному соединению Wi-Fi либо посредством переносных накопителей информации в редактор математических моделей 10 универсального навигационного тренажера 1, где с учетом этих данных создается новая или корректируется существующая математическая модель судна.
С помощью средств виртуального моделирования внешних условий 8 и системы разработки тренажерных баз данных 9 задаются внешние условия и готовятся сценарии предполагаемых работ. Данные от средств виртуального моделирования внешних условий 8, системы разработки тренажерных баз данных 9 и редактора математических моделей 10 взаимосвязаны в рамках каждого сценария. Эти данные из автоматизированных рабочих мест 7 передаются на серверные станции 6, откуда в процессе работы универсального навигационного тренажера 1 загружаются в инструкторские станции 3 и учебные места 4. Данные от инструкторских станций 3 и учебных мест 4, полученные при проведении работ универсального навигационного тренажера 1 передаются на серверные станции 6, откуда могут быть доступны для обработки на автоматизированных рабочих местах 7.
После создания математических моделей судов в редакторе математических моделей 10 в универсальном навигационном тренажере 1 по заранее подготовленным сценариям производятся следующие виды работ: проверка разработанных методик УЛО, отработка действий при морских операциях (в т.ч. грузобалластных) в сложных ледовых условиях, подготовка экипажей судов к проведению совместных ледовых операций и отработка действий в аварийных ситуациях.
В процессе моделирования морских операций УЛО в тренажерном комплексе с помощью опытных судоводителей производится отработка известных и разработка новых методов и тактических приемов управления ледовой обстановкой, на основании которых затем будут разрабатываться регламентирующие документы по управлению ледовой обстановкой у морских плавучих и гравитационных сооружений.
Предлагаемый научно-исследовательский тренажерный комплекс моделирования операций управления ледовой обстановкой вокруг морских плавучих и гравитационных сооружений позволяет наиболее точно моделировать динамические параметры движения судов в морских ледовых условиях при выполнении любых маневров на всех режимах движения, а также сократить время, затрачиваемое на создание уточненных математических моделей судов, используемых в работе тренажерного комплекса, что выгодно отличает его от прототипа.
Катализатор для получения сверхвысокомолекулярного полиэтилена
Способ получения хлопчатобумажной ткани технического назначения с комплексом защитных свойств от кислот и нефтепродуктов
Координатный стол
Стенд для контроля точности контурных перемещений промышленного робота
Эпоксиполиэфирная лакокрасочная композиция
Способ сбора штормовых выбросов морских водорослей
Устройство для преобразования изменения сопротивления в напряжение
Устройство для защиты емкостного накопителя энергии
Катализатор, способ его приготовления и способ получения β-пиколина
Катализатор, способ его приготовления и способ получения малосернистого дизельного топлива
Катализатор для получения сверхвысокомолекулярного полиэтилена
Способ получения хлопчатобумажной ткани технического назначения с комплексом защитных свойств от кислот и нефтепродуктов
Координатный стол
Стенд для контроля точности контурных перемещений промышленного робота
Эпоксиполиэфирная лакокрасочная композиция
Способ сбора штормовых выбросов морских водорослей
Фотохромная регистрирующая среда для трехмерной оптической памяти
Устройство для преобразования изменения сопротивления в напряжение
Устройство для защиты емкостного накопителя энергии
Катализатор, способ его приготовления и способ получения β-пиколина

