Результат интеллектуальной деятельности: ГИДРОАКУСТИЧЕСКИЙ СПОСОБ ИЗМЕРЕНИЯ ГЛУБИНЫ ПОГРУЖЕНИЯ НЕПОДВИЖНОГО ОБЪЕКТА
Вид РИД
Изобретение
Способ измерения глубины погружения неподвижного объекта относится к области гидроакустики и может быть использован для повышения эффективности навигационных гидроакустических станций освещения ближней обстановки и расширения объема решаемых ими задач.
Известен метод определения глубины погружения неподвижного объекта с использованием гидролокатора, описанный в работе (А.П. Сташкевич. «Акустика океана». Судостроение, Ленинград, 1966 г., стр. 263).
Гидролокатор производит излучение зондирующего сигнала в момент времени t1, приемник обрабатывает эхосигнал и измеряет временную задержку между моментами излучения зондирующего сигнала и приема эхосигнала, определяет на момент времени t1 дистанцию до объекта по величине временной задержки и известной скорости распространения звука, измеряет направления на цель в вертикальной плоскости; определяет глубину Н погружения по формуле Н=Dsin(α), где D - измеренная дистанция до объекта, α - угол между направлением движения носителя и направлением на объект в вертикальной плоскости. Недостатком этого способа является сложность определения угла в вертикальной плоскости, который определяется изменением положения характеристики направленности.
Известен способ определения глубины погружения неподвижного объекта по патенту №2350983 от 15.02.2007 г., который содержит излучение зондирующего сигнала в момент времени t1 и измерение дистанции до объекта D1 в этот момент времени, измерение дистанции D2 в последующий момент времени t2. По разности времен излучения Δt=(t2-t1), измеренным оценкам дистанции D1 и D2, оценки собственной скорости V в вычислителе определяется пройденный путь V Δt носителем гидролокатора между посылками и определяется глубина Н по формуле:
 , где
, где  .
.
В этом случае направление движения носителя гидролокатора может не совпадать с направлением прихода эхосигнала от обнаруженного объекта. Это приводит к снижению точности определения глубины погружения объекта из-за несовпадения направления собственного движения и направления прихода сигнала при использовании оценки собственной скорости. При этом изменение составляющей скорости сближения проявляется не только, когда направление прихода эхосигнала не совпадает с направлением движения носителя гидролокатора в горизонтальной плоскости, но и когда направление движения носителя гидролокатора не совпадает с направлением прихода эхосигнала в вертикальной плоскости.
Задачей изобретения является повышение точности измерения глубины погружения объекта.
Технический результат от использования изобретения заключается в устранении влияния несовпадения направления движения носителя и направления на неподвижный объект на результат измерения и оценку глубины погружения неподвижного объекта, что обеспечивает решение задачи.
Достижение указанного технического результата достигается тем, что в способ измерения глубины погружения неподвижного объекта, содержащий излучение двух последовательных во времени зондирующих сигналов с движущегося носителя, прием эхосигналов гидроакустической антенной, установленной на движущемся носителе, измерение дистанции D1 по первому зондирующему сигналу, измерение дистанции D2 по второму зондирующему сигналу через время Δt=(t2.-t1), измерение собственной скорости движения носителя Vдв, введены новые признаки, а именно: формируют на гидроакустической антенне в приеме статический веер характеристик направленности в горизонтальной плоскости, прием эхосигналов осуществляют статическим веером характеристик направленности в горизонтальной плоскости, измеряют радиальную скорость сближения движущегося носителя с неподвижным объектом Vр.изм как отношение (D2-D1)/Δt, определяют направление движения носителя, определяют направление прихода эхосигнала, измеряют угол между направлением движения носителя и направлением прихода эхосигнала Q0,, определяют скорость сближения движущегося носителя с неподвижным объектом с учетом угла между направлением движения и направлением на неподвижный объект в горизонтальной плоскости Vсб.гор=Vр.изм/cos Q0, определяют косинус угла между направлением на неподвижный объект и направлением движения носителя в вертикальной плоскости cos U0=Vсб.гор\Vдв, а глубину погружения объекта определяют по формуле
 .
.
Поясним достижение технического результата.
Если гидролокатор движется точно на неподвижный объект, то величина изменения расстояния будет соответствовать скорости гидролокатора, и это является скоростью сближения гидролокатора и неподвижного объекта. При этом величина изменения расстояния будет пропорциональна скорости сближения с объектом за счет собственной скорости гидролокатора. Эта величина будет зависеть от того, с какого направления принимается сигнал. (А.С. Колчеданцев. Гидроакустические станции. Судостроение, Л., 1982 г., стр. 30) Если направление приема сигнала (направление на неподвижный объект) совпадает с направлением движения носителя гидролокатора, то скорость сближения и величина изменения расстояния будет равна собственной скорости носителя. Если направление прихода сигнала отличается от направления движения носителя гидролокатора, то величина изменение расстояния будет определяться разностью углов между направлением на неподвижный объект и направлением движения, носителя гидролокатора. Обнаружение сигнала производится, как правило, при круговом обзоре, поэтому объект может быть обнаружен в любом направлении. Для повышения точности измерения глубины необходимо использовать достоверную оценку собственной скорости сближения носителя гидролокатора и в частности с учетом разности угла между направлением на объект и направлением движения носителя гидролокатора. Для этой цели необходимо произвести измерение направления движения носителя с использованием навигационной системы, которая является штатной аппаратурой, установленной на любом корабле, и определить пространственное положение объекта с использованием гидролокационной станции, которая определяет курсовой угол неподвижного объекта с точностью формирования статического веера приемных характеристик направленности в горизонтальной плоскости. Как правило, ширина характеристик направленности статического веера достаточно узкая и они перекрываются на уровне не хуже 0,7, что обеспечивает высокую точность измерения направления на объект. Можно изменить направление собственного движения носителя с учетом прихода эхосигнала, но это потеря времени и необходимость дополнительных измерений. Поэтому в предлагаемом техническом решении используется измеренная оценка радиальной скорости Vр.изм и эта оценка корректируется в зависимости от направления прихода эхосигнала. Радиальная скорость измеряется стандартным методом как отношением разности дистанций к разности времен измерений. Определяется угол между направлением движения и направлением прихода эхосигнала Q0 и корректируется оценка измеренной радиальной скорости за счет смещения в горизонтальной плоскости и определяется скорректированная скорость сближения Vсб.гор=Vр.изм/cos Q0. Ширина характеристики направленности в вертикальной плоскости может достигать нескольких десятков градусов при использовании, так называемой, «косекенсной» характеристики направленности (А.В. Богородский, Г.В. Яковлев, Е.А. Корепин. А.К. Должиков. «Гидроакустическая техника исследования и освоения океана». Л.: Гидрометиоиздат, 1084 г., стр 105). В этом случае смещение оценки за счет приема в вертикальной плоскости определить нельзя, поскольку не известен угол прихода эхосигнала. Будем исходить из следующих очевидных положений. Если бы направление движения носителя со скоростью Vдв совпадало с направлением прихода эхосигнала (направлением на неподвижный объект) в вертикальной плоскости, то оценка радиальной скорости совпадала бы с измеренной собственной скоростью. Если она не совпадает, значит можно определить угол, который характеризует величину отклонения cosU0=Vсб.гор/Vдв,. В этом случае по оценке полученного угла можно определить глубину погружения объекта при решении прямоугольного треугольника, в котором есть оценка дистанции D1 и оценка косинуса вертикального угла между направлением движения и направлением на объект по формуле  .
.
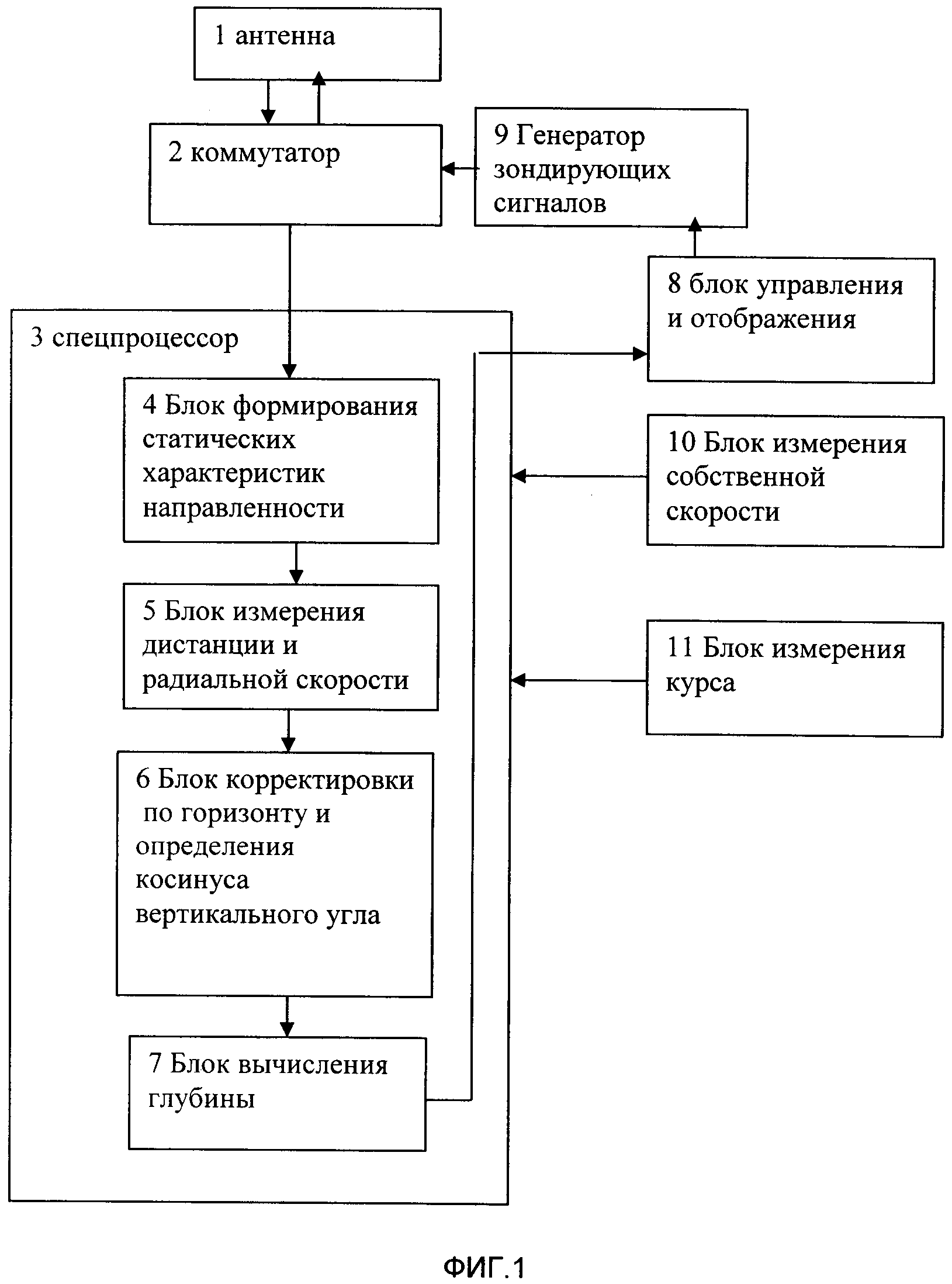
Блок-схема устройства, реализующего рассматриваемой способ, представлена на фиг. 1.
На фиг. 1 антенна 1 двусторонней связью соединена с коммутатором приема передачи 2, выход которого соединен с первым входом спецпроцессора 3. В состав спецпроцессора 3 входят последовательно соединенные блок 4 формирования статических характеристик направленности, блок 5 измерения дистанции и радиальной скорости, блок 6 корректировки по горизонту и определения косинуса вертикального угла, блок 7 вычисления глубины. Выход спецпроцессора 3 соединен со входом блока 8 управления и отображения и через генератор 9 зондирующих сигналов со вторым входом коммутатора 2. Блок 10 измерения собственной скорости соединен со вторым входом спецпроцессора 3, а третий вход спецпроцессора 3 соединен с выходом блока 11 измерения собственного курса.
Антенна 1, генератор зондирующих сигналов 9 и коммутатор 2 являются известными устройствами, которые подробно описаны в отечественной литературе (А.С. Колчеданцев. «Гидроакустические станции». Судостроение, Л., 1982 г., А.Н. Яковлев Г.П. Кабаков. «Гидролокаторы ближнего действия». Судостроение, Л., 1983 г.). Спецпроцессор 3 является известным устройством, который реализован в современных гидролокаторах. (Ю.А. Корякин, С.А. Смирнов, Г.В. Яковлев. «Корабельная гидроакустическая техника». СПб.: «Наука», 2004 г., с. 281-289). Спецпроцессоры предназначены для реализации конкретных алгоритмов обработки с использованием аппаратурных решений и жесткой логики вычислений. Формирование веера статических характеристик направленности и является известной операцией, которая может выполняться как в аналоговом, так и в цифровом виде и используется в современной гидроакустической аппаратуре (там же, стр. 237). Гидроакустический измеритель собственной скорости движения блок 10 является известным устройством, которые выпускаются серийно и устанавливаются на всех современных судах (А.В. Богородский, Д.Б. Островский. «Гидроакустические навигационные и поисково-обследовательские средства». Санкт-Петербург, 2009 г., Изд. ЛЭТИ, стр. 40-81).
Реализация предлагаемого способа происходит следующим образом.
В блоке 8 управления и отображения формируется команда на излучение и передается в генератор 9 зондирующих сигналов, который формирует зондирующий сигнал определенной длительности и мощности и через коммутатор 2 приема передачи передает на антенну 1, которая излучает сигнал в водное пространство.
Отраженный эхосигнал принимается антенной 1, где преобразуется из акустического сигнала в электрический сигнала и через коммутатор 2 передается на спецпроцессор 3 для обработки в блоке 4 формирования статистических характеристик направленности. В блоке 5 происходит прием эхосигнала, измерение дистанции D и определение измеренной радиальной скорости Vр.изм сближения, которое выполняется во всех современных гидролокаторах. Корректировки оценки радиальной скорости Vсб.гор=Vp.изм/cos Q0 по горизонтали определяется в блоке 6, куда поступает из блока 11 оценка собственного курса движения, а направление приема эхосигнала измеряется по номеру характеристики направленности в блоке 4. Определив Vсб.гор, там же может быть определен вертикальный угол положения объекта относительно направления движения гидролокатор cosU0=V.сб.гор/Vдв. Для выполнения этой операции необходимы исходные данные о собственной скорости Vдв, которая поступает из блока 10. В блоке 7 происходит вычисление глубины погружения объекта по формуле  и передается в блок 8 управления и отображения. Практически все указанные процедуры могут быть реализованы на современных компьютерах и ноутбуках, в которых реализованы вычислительные программы Матлаб, Матсард и др. (А.Б. Сергиенко. Цифровая обработка сигналов. СПб., «БХВ - Петербург», 2011 г.).
и передается в блок 8 управления и отображения. Практически все указанные процедуры могут быть реализованы на современных компьютерах и ноутбуках, в которых реализованы вычислительные программы Матлаб, Матсард и др. (А.Б. Сергиенко. Цифровая обработка сигналов. СПб., «БХВ - Петербург», 2011 г.).
Таким образом, предложенная процедура измерения позволяет определять глубину погружения неподвижного объекта с учетом пространственных оценок положения гидролокатора и объекта.
Способ измерения глубины погружения неподвижного объекта, содержащий излучение двух последовательных во времени зондирующих сигналов с движущегося носителя, прием эхосигналов гидроакустической антенной, установленной на движущемся носителе, измерение дистанции D по первому зондирующему сигналу, измерение дистанции D по второму зондирующему сигналу через время Δt=(t-t), измерение собственной скорости движения носителя V, отличающийся тем, что формируют на гидроакустической антенне в приеме статический веер характеристик направленности в горизонтальной плоскости, прием эхосигналов осуществляют статическим веером характеристик направленности в горизонтальной плоскости, измеряют радиальную скорость сближения движущегося носителя с неподвижным объектом V как отношение (D-D)/Δt, определяют направление движения носителя, определяют направление прихода эхосигнала, измеряют угол между направлением движения носителя и направлением прихода эхосигнала Q°, определяют скорость сближения движущегося носителя с неподвижным объектом с учетом угла между направлением движения и направлением на неподвижный объект в горизонтальной плоскости V=V/cos Q°, определяют косинус угла между направлением на неподвижный объект и направлением движения носителя в вертикальной плоскости cosU°=V/V, а глубину погружения объекта определяют по формуле .
Активный гидролокатор
Способ определения маневра шумящего объекта
Приемный тракт гидролокатора
Передающий тракт для возбуждения гидроакустической антенны
Система обеспечения гидроакустической совместимости корабельных гидроакустических средств
Способ отображения гидролокационной информации
Способ пассивного определения координат движущегося слабого источника излучения
Способ обработки и классификации гидролокационной информации
Способ оперативного контроля приемного тракта гидроакустического комплекса корабля
Способ многоканальной асинхронной широтно-импульсной модуляции и устройство для его реализации
Способ определения параметров маневрирования источника зондирующих сигналов
Способ отображения гидроакустической информации

