Результат интеллектуальной деятельности: ОЦЕНКА ВЕСА ТРАНСПОРТНОГО СРЕДСТВА
Вид РИД
Изобретение
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к способу оценки веса mv транспортного средства согласно преамбуле пункта 1 формулы изобретения. Изобретение относится также к системе для оценки веса mv транспортного средства согласно преамбуле пункта 18 формулы изобретения и к компьютерной программе для применения способа.
УРОВЕНЬ ТЕХНИКИ
Вес транспортного средства, который может принимать форму автопоезда, является важным параметром во многих функциях в его системе управления. На транспортное средство значительно влияет его вес во многих ситуациях, таким образом, очень важно иметь возможность оценивать его правильно. Его вес типично формирует часть моделей транспортного средства, которые используются для различных вычислений и различных форм управления в транспортном средстве.
Вес транспортного средства, способного перевозить тяжелые грузы, например автобус, способный перевозить большое число людей, или грузовой автомобиль, способный перевозить различные типы тяжелых грузов, может значительно изменяться. Например, веса грузовых автомобилей значительно меньше, когда они порожние, чем когда они полностью нагружены. Веса автобусов аналогично значительно меньше, когда они пустые, чем когда заполнены пассажирами. Изменения в весе легкового автомобиля значительно меньше, чем в случае транспортных средств, предназначенных для перевозки тяжелых грузов, но различие между пустым легковым автомобилем и полностью нагруженным, особенно когда полностью нагруженный легковой автомобиль может также иметь нагруженный прицеп, присоединенный к нему, может быть большим относительно низкого веса самого легкового автомобиля.
Вес транспортного средства влияет на его сопротивление движению и, следовательно, является важным параметром, например, в автоматическом выборе передачи. Автоматический выбор передачи имеет место, например, в ручной коробке передач с автоматическим управлением, для которой важно иметь возможность определять фактическое сопротивление движению и, следовательно, определять какую передачу выбирать в данной ситуации.
То, как топография участка дороги влияет на транспортное средство, также сильно зависит от веса транспортного средства, что является решающим фактором в том, насколько оно относительно ускоряется и замедляется на спуске и на подъеме. Вес транспортного средства, следовательно, также является важным параметром в системах круиз-контроля, которые принимают топографию участка дороги во внимание, т.е. в так называемых упреждающих системах круиз-контроля, в которых величина крутящего момента двигателя, применяемого в ситуации, зависит от того, как топография участков дороги впереди будет влиять на скорость транспортного средства. Вес транспортного средства, конечно, также является важным параметром в традиционных системах круиз-контроля.
В настоящее время применяются различные способы, чтобы оценивать вес транспортного средства. Один такой способ использует информацию от системы пневматической подвески транспортного средства. Система пневматической подвески измеряет осевые давления на всех осях, которые имеют пневматическую подвеску, и передает эту информацию блоку управления как основу для вычисления веса транспортного средства. Этот способ работает хорошо, если есть пневматическая подвеска на всех осях, но не работает удовлетворительно, или не работает вовсе, если одна или более осей не имеют пневматической подвески. Этот способ, например, является очень проблематичным в автопоездах, содержащих прицепы или полуприцепы, которые не сообщают нагрузки на оси, что может быть относительно обычным в случаях, когда более или менее неизвестные прицепы часто присоединяются к автопоезду во время эксплуатации транспортного средства. Этот способ также является проблематичным во время эксплуатации транспортного средства, поскольку осевое давление будет изменяться, когда транспортное средство движется по неровным участкам проезжей части, потенциально приводя к неправильной оценке веса вследствие неустойчивых осевых давлений.
Другие известные способы оценки веса основаны на ускорении, используя тот факт, что возможно вычислять вес транспортного средства из усилия, которое двигатель передает транспортному средству, и ускорения, получающемуся в результате этого усилия. Усилие от двигателя известно в транспортном средстве, но такие способы подразумевают необходимость измерять или оценивать ускорение.
Согласно способу ускорение оценивается посредством выполнения дифференцирования скорости транспортного средства. Этот способ работает хорошо при высоких ускорениях, т.е. на низких передачах при относительно низких скоростях транспортного средства, но недостаток в том, что на этот способ влияет уклон дороги, влекущий за собой дифференцирование, поскольку уклон дороги является параметром, неизвестным системе.
Другой способ оценивает ускорение посредством акселерометра. Способ на основе акселерометра имеет преимущество в том, что ускорение измеряется непосредственно, но только ограниченное число современных транспортных средств имеет акселерометр, что означает, что этот способ неприменим, в целом, на всех транспортных средствах. В настоящее время способ на основе акселерометра также испытывает недостаток в том, что сигнал акселерометра является зашумленным, что снижает точность способа.
Другой способ оценивает ускорение во время переключений передач. Этот способ основан на предположении, что сопротивление движению не изменяется во время переключения передачи, и, следовательно, основан на сравнении ускорения транспортного средства до, во время и после переключений передач для того, чтобы определять его вес. Этот способ дает в результате очень неудовлетворительные оценки веса транспортного средства.
Оценки веса на основе ускорения, как правило, имеют недостатки в том, что должны быть удовлетворены определенные требования движения, чтобы хорошая оценка была возможной. Не всегда бесспорно, что эти требования удовлетворяются во время движения, в таком случае хорошая оценка веса невозможна. Например, оценка веса на основе ускорения требует полного ускорения на низких передачах, чтобы добиваться достоверного результата. По существу, полное ускорение не всегда происходит во время движения, если, например, транспортное средство начинает свое движение вниз по склону, например, на скользком въезде с заправочной станции на шоссе, где уклон делает возможным ускорение относительно мягким перед поддержанием, по существу, постоянной скорости для оставшейся части поездки, эти способы часто не обеспечивают хорошую оценку веса транспортного средства.
Таким образом, предыдущие известные способы оценки веса не всегда применимы и/или не могут предоставлять достоверные оценки по каждому виду движения.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Целью настоящего изобретения является предоставление корректных оценок веса mv транспортного средства эффективным в вычислительном отношении способом.
Эта цель достигается посредством вышеупомянутого способа для оценки веса mv для транспортного средства согласно характеризующей части пункта 1 формулы изобретения. Она также достигается посредством вышеупомянутой системы для оценки веса mv для транспортного средства согласно характеризующей части пункта 18 формулы изобретения и посредством вышеупомянутой компьютерной программы.
Согласно настоящему изобретению, оценка веса mv для транспортного средства выполняется, когда результат подвержен минимальному влиянию от источников погрешности. Это достигается посредством того, что изобретение выбирает выполнение оценки в моменты времени, когда движущая сила FT доминирует над силами, которые действуют на транспортное средство. Поскольку движущая сила FT хорошо известна и в то же время подразумевает относительно незначительные погрешности, оценка, которая имеет хорошее качество, достижима посредством изобретения. Другими словами, может быть выполнена высококачественная оценка, поскольку она основана, главным образом, на движущей силе FT, которая сама сохраняет высокое качество. Выполнение оценок, только когда они вероятно должны сохранять высокое качество, также значительно ограничивает объем вычислений, подразумеваемых в такой оценке.
Согласно варианту осуществления изобретения оценка основывается, по меньшей мере, на действии, которое силы оказывают на транспортное средство в течение периода времени (от t0 до te, т.е. t0-te) или расстояния (от x0 до xe, т.е. x0-xe), на изменении в скорости транспортного средства на протяжении периода t0-te или расстояния x0-xe и на изменении в его высоте над уровнем моря на протяжении периода t0-te или расстояния x0-xe. Эти оценки могут быть основаны на первоначальной скорости v0 транспортного средства и конечной скорости ve транспортного средства соответственно в начале (t0, x0) и конце (te, xe) периода или расстояния, что является полезным в том, что не нужно выполнять дифференцирование зашумленного сигнала скорости, таким образом уменьшая погрешность оценки.
Эти оценки могут быть вычислены на основе интегралов по периоду t0-te, таким образом также увеличивая качество оценок, поскольку интегрирования служат в качестве фильтра для возмущений во входных параметрах.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Изобретение объясняется более подробно ниже со ссылкой на присоединенные чертежи, на которых одинаковые обозначения ссылок используются для аналогичных элементов и на которых
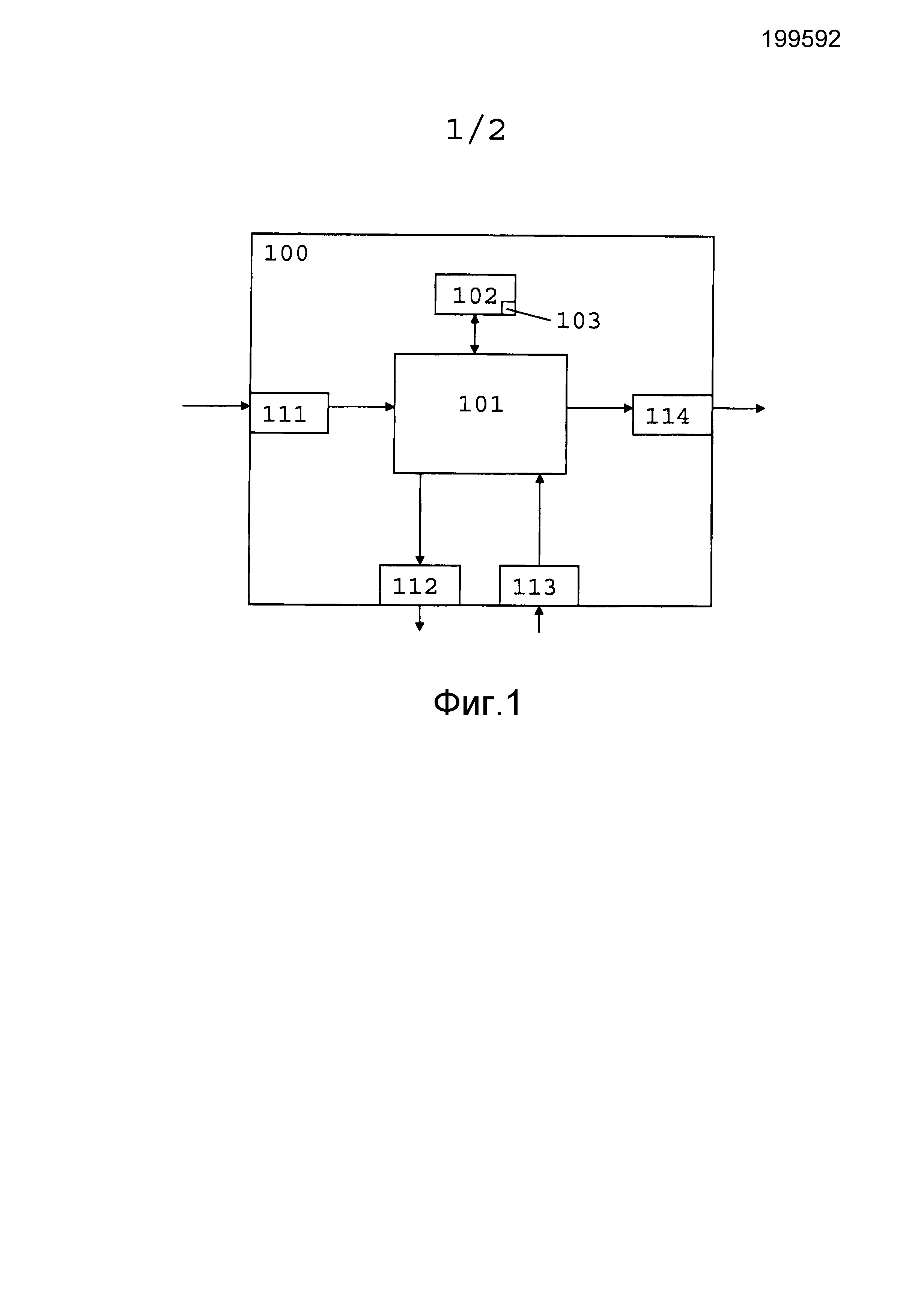
Фиг.1 изображает блок управления, и
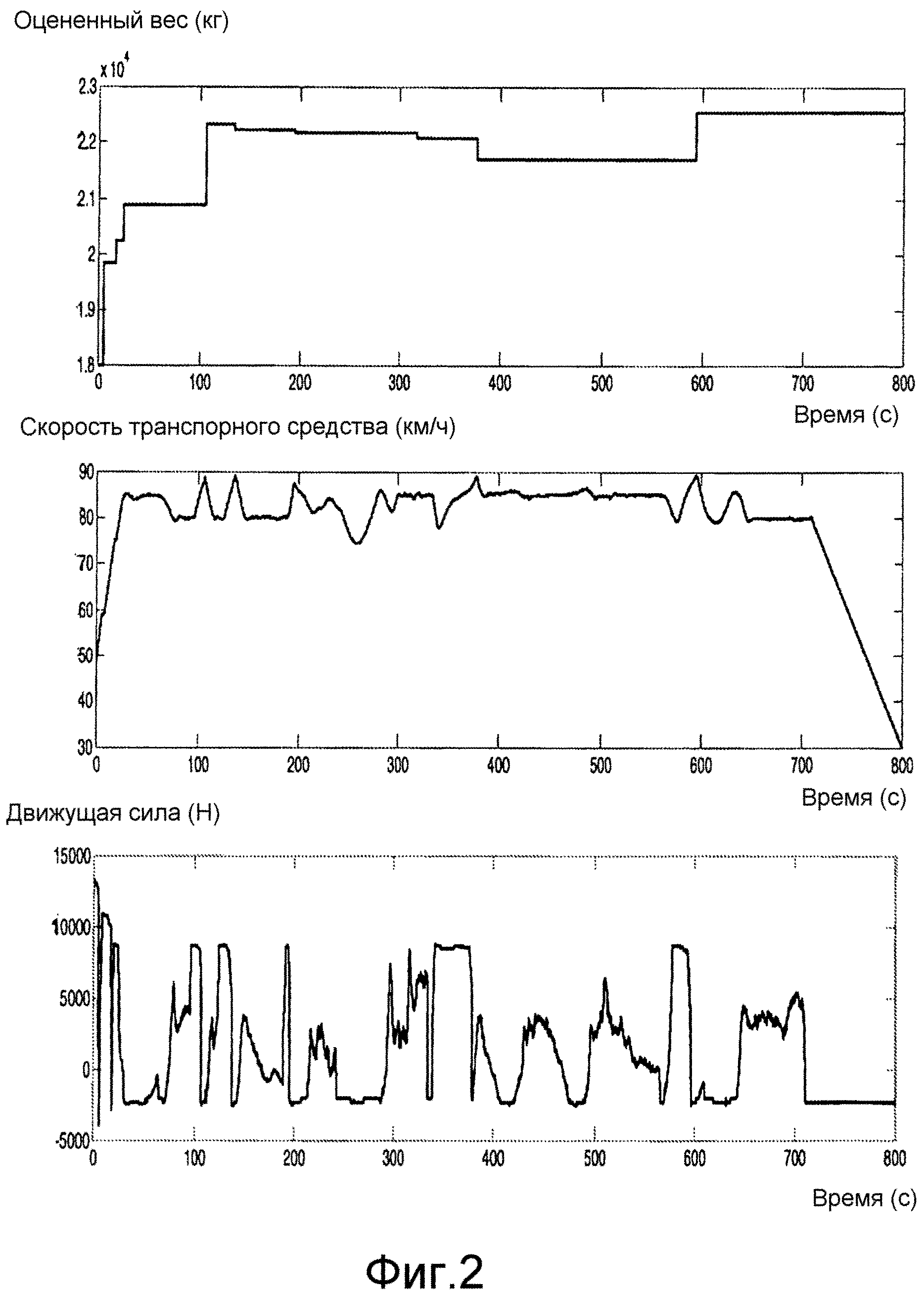
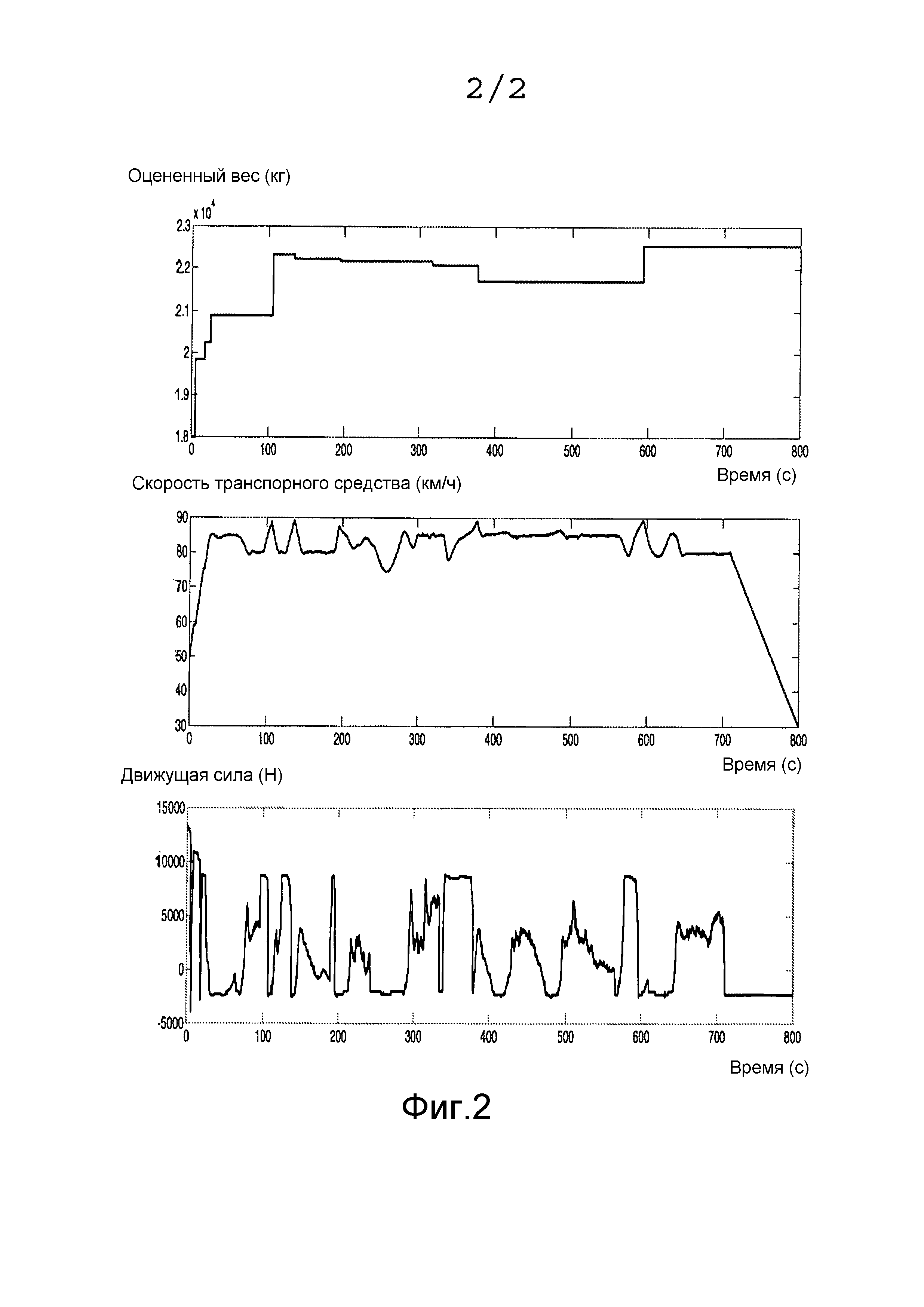
Фиг.2 изображает примеры данных, измеренных во время движения.
ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
Различные силы действуют на транспортное средство, когда оно находится в движении. Одной из них является движущая сила FT, которая двигает транспортное средство вперед, или назад, когда транспортное средство дает задний ход. Дополнительно, такие силы содержат одну или более из силы FR, относящейся к сопротивлению качению, силы FA, относящейся к сопротивлению воздуха, и силы FG, относящейся к гравитации. Уклон α дороги также значительно влияет на сопротивление движению транспортного средства.
Оценка веса mv транспортного средства, следовательно, основана, согласно настоящему изобретению, на движущей силе FT и по меньшей мере одной дополнительной силе из силы FR сопротивления качению, силы FA сопротивления воздуха и силы FG тяжести и на топографической информации для соответствующего участка дороги. Из топографической информации возможно определять эффект уклона α дороги вдоль участка дороги. Согласно настоящему изобретению оценка веса mv транспортного средства выполняется, когда из сил, действующих на транспортное средство, доминирует движущая сила FT. Эта сила доминирует над силами, которые, например, действуют на транспортное средство во время сильного ускорения, которое может происходить на низких передачах, или когда транспортное средство поддерживает высокую скорость на подъеме.
Оценка веса mv транспортного средства в течение периода времени t0-te или расстояния x0-xe, когда движущая сила FT является доминирующей силой, действующей на транспортное средство, делает возможным выполнение оценки с хорошей точностью, поскольку величина движущей силы FT для транспортного средства заведомо известна. В транспортном средстве таким образом выполняется доступ к высокоточной информации о движущей силе FT. В отличие от этого, информация, доступная в транспортном средстве о других силах, которые действуют на него, например, о силе FR сопротивления движению и силе FA сопротивления воздуха, имеет малую точность и часто включает в себя погрешности. Дополнительные силы зачастую оцениваются на основе модели для стандартного транспортного средства, которая может отличаться от конкретного транспортного средства, для которого должен быть оценен вес mv транспортного средства. Погода и состояние дороги также влияют на силу FR сопротивления движению и силу FA сопротивления воздуха со значительной, следовательно, неопределенностью о величине этих сил. Включение также топографической информации в оценку означает, что силы FG тяжести, возникающие, например, от крутых подъемов, принимаются во внимание при оценке веса mv транспортного средства, давая в результате то, что оценка может, например, также быть выполнена, когда транспортное средство не ускоряется, а все еще поддерживает высокую скорость на подъеме. В общем, настоящее изобретение основано на выборе выполнения оценки веса транспортного средства, когда из сил, действующих на транспортное средство, доминирует движущая сила FT, которая известна с хорошей точностью в транспортном средстве, что дает гарантию очень точной оценки. Некачественные оценки, таким образом, избегаются, и достоверные оценки выполняются с помощью минимального объема вычислений.
Согласно варианту осуществления настоящего изобретения предполагается, что по меньшей мере из двух сил, действующих на транспортное средство, доминирует движущая сила FT, если она значительно больше, чем одна или более дополнительных сил, действующих на него. В таком случае согласно настоящему изобретению должна выполняться оценка веса mv транспортного средства.
Согласно варианту осуществления настоящего изобретения движущая сила FT предполагается значительно большей, чем одна или более дополнительных сил, если крутящий момент M, извлеченный из двигателя транспортного средства в момент времени, превышает предварительно определенную пропорцию максимального крутящего момента MMax, который двигатель может предоставлять. Может также быть видно, когда движущая сила FT расценивается как значительно большая, чем одна или более дополнительных сил, если она превышает в момент времени предварительно определенную пропорцию максимальной движущей силы FTmax на текущей передаче. Это упрощает принятие решения о том, когда выполнять или выполнять или нет оценку веса mv транспортного средства.
Согласно варианту осуществления изобретения движущая сила FT расценивается как значительно большая, чем одна или более дополнительных сил, если крутящий момент M, извлеченный в момент времени из двигателя транспортного средства, превышает 90% его максимального крутящего момента MMax.
Эта предварительно определенная пропорция может быть регулируемым значением, в таком случае она может быть изменена, так что оценка выполняется любое подходящее число раз за поездку. Другими словами, пропорция здесь предварительно определена для конкретного расстояния поездки, но может быть отрегулирована по величине для различных расстояний поездки. Это регулируемое значение упрощает достижение любого желаемого подходящего числа. То, до какого уровня это значение должно быть отрегулировано, может зависеть от различных факторов. Оно будет, как правило, отрегулировано таким образом, чтобы добиваться баланса между числом выполненных оценок и их качеством. Более низкий уровень регулируемого значения означает, что оценки выполняются, когда движущая сила FT является менее доминирующей, чем было бы необходимо для выполнения оценки при более высоком уровне регулируемого значения, приводя к большему числу выполняемых оценок, но с потенциальными некоторыми варьированиями в их точности. Более высокий уровень регулируемого значения дает в результате меньшее число оценок, но с высокой точностью.
Согласно другому варианту осуществления изобретения величина движущей силы FT сопоставляется с величиной одной или более дополнительных сил, которые действуют на транспортное средство. В этом случае движущая сила FT расценивается как значительно большая, чем эти одна или более дополнительных сил, если она, по меньшей мере, в предварительно определенное число раз больше, чем по меньшей мере одна дополнительная сила. Здесь, движущая сила FT, следовательно, должна быть в предварительно определенное число раз больше, чем одна или более из силы FR сопротивления качению, силы FA сопротивления воздуха и силы FG тяжести, которые действуют на транспортное средство, для того, чтобы оценка веса mv транспортного средства была выполнена, и предварительно определенное число может быть определено таким образом, что гарантируется оценка высокого качества. Например, движущая сила FT может расцениваться как доминирующая, если она по меньшей мере в три (3) раза больше, чем одна или более дополнительных сил, которые действуют на транспортное средство, в таком случае должна быть выполнена оценка веса mv транспортного средства. Предпочтительное число, конечно, не должно быть целым кратным числом, а может быть любым подходящим числом, например дробным числом. Таким образом, движущая сила FT может, например, также расцениваться как доминирующая, если она по меньшей мере в два с половиной (2,5) раза больше, чем одна или более дополнительных сил, которые действуют на транспортное средство.
Это предварительно определенное число может быть регулируемым значением, в таком случае оно предварительно определяется для конкретного расстояния поездки, но может быть отрегулировано по величине для различных расстояний поездки. Аналогично предварительно определенной пропорции выше, это предварительно определенное регулируемое значение может затем быть изменено, так что оценка выполняется любое подходящее число раз за поездку. Низкий уровень для этого регулируемого значения ведет к тому, что выполняется больше оценок, но их точность потенциально варьируется в некоторой степени. Высокий уровень для этого регулируемого значения дает в результате меньшее число оценок, но с высокой точностью.
Предыдущие известные способы оценки веса mv транспортного средства использовали ускорение а транспортного средства, определенное посредством дифференцирования скорости транспортного средства. Сигнал скорости транспортного средства может быть относительно зашумленным, потенциально давая в результате то, что его производная является очень зашумленной. Предыдущие известные способы поэтому не формируют точных оценок веса mv транспортного средства.
Уравнения сил для транспортного средства могут быть заданы следующим образом:
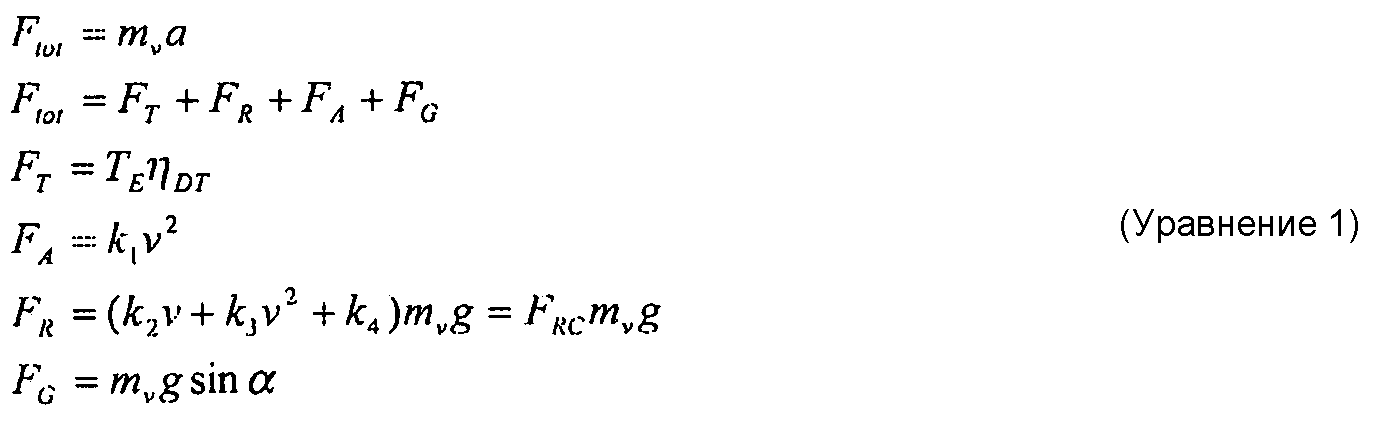
при этом
Ftot - это все силы, которые действуют на транспортное средство;
g - это постоянная силы тяжести;
α - это уклон дороги в радианах;
v - это скорость транспортного средства;
ηDT - это общее передаточное число трансмиссии силовой схемы, включающее в себя радиус колеса;
TE - это выходной крутящий момент двигателя;
a - это ускорение транспортного средства, полученное из скорости v транспортного средства;
k1, k2, k3, k4 - это константы; и
FRC - это коэффициент для силы сопротивления качению (который зависит от скорости v транспортного средства).
Эти уравнения могут быть перезаписаны, чтобы формировать выражение для вычисления веса транспортного средства:
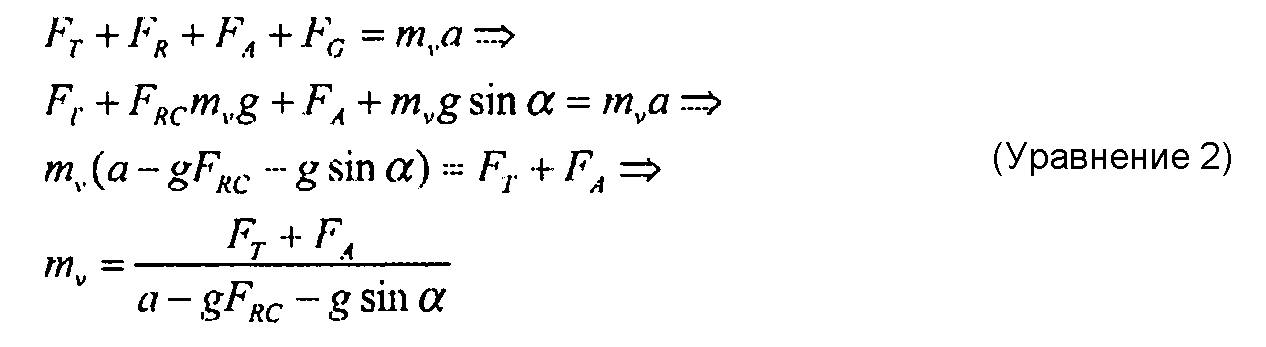
Как упомянуто выше и как также указано посредством уравнения 2, ранее известные способы используют сигнал для ускорения a, который определяется посредством дифференцирования скорости транспортного средства. Сигнал скорости является зашумленным, давая в результате то, что его производная является очень зашумленной, и оценка веса mv транспортного средства является неточной.
Вариант осуществления настоящего изобретения основывает оценку веса mv транспортного средства на том действии, который использует по меньшей мере две силы, т.е. движущая сила FT и одна или более дополнительных сил, которые действуют на транспортное средство, оказывают на транспортное средство в течение периода времени t0-te, который имеет продолжительность в допустимом интервале времени, т.е. период t0-te дольше, чем кратчайшее допустимое время, но короче, чем самое продолжительное допустимое время. Этот же вариант осуществления также основывает оценку веса mv транспортного средства на изменении в скорости транспортного средства в течение периода t0-te и на изменении в его высоте над уровнем моря в течение того же периода.
Поскольку оценка зависит в этом случае от изменения в скорости транспортного средства, т.е. от различия между первоначальной скоростью v0 и конечной скоростью ve, достаточно здесь определять начальное значение v0 и конечное значение ve для скорости транспортного средства, получая в результате эффективную в вычислительном отношении оценку.
В этом случае, следовательно, достаточно определять для скорости транспортного средства начальное значение v0 и конечное значение ve и определять различие между ними, следовательно, без необходимости выполнять дифференцирование скорости v для того, чтобы получать ускорение a. Этот вариант осуществления, таким образом, избегает оценки на основе зашумленных и формирующих погрешности сигналах ускорения. Это станет ясно ниже.
Вышеупомянутый период времени t0-te, в течение которого определяется влияние сил на транспортное средство, может также соответствовать расстоянию x0-xe, пройденному в течение того же периода, которое имеет длину в пределах допустимого диапазона расстояния, так что оно длиннее кратчайшего допустимого расстояния, но короче самого длинного допустимого расстояния. Оценка веса mv транспортного средства также основана на изменении в скорости транспортного средства на протяжении расстояния x0-xe и на изменении в его высоте над уровнем моря на протяжении того же расстояния.
Здесь, опять же, оценка может быть основана на первоначальном значении v0 и конечном значении ve для скорости транспортного средства, получая в результате эффективную в вычислительном отношении оценку. Также не нужна дифференциация скорости v, чтобы получать ускорение a, что дает в результате оценку высокого качества.
Согласно варианту осуществления изобретения изменение в высоте над уровнем моря определяется на основе уклона α на соответствующем участке дороги. В этом случае соответствующие начальное и конечное значения для высоты над уровнем моря транспортного средства поэтому определяются на основе информации, относящейся к уклону α дороги.
Уклон α дороги может здесь быть определен на основе информации топографической карты в комбинации с информацией позиционирования. Карты, содержащие топографическую информацию, например информацию об уклоне α и/или высоте над уровнем моря различных частей участка дороги, могут здесь быть использованы вместе с информацией позиционирования, которая указывает, где на карте транспортное средство находится в момент времени, тем самым также предоставляя значение для уклона α дороги. Такая информация позиционирования, например, может получаться с помощью GPS (системы глобального позиционирования) или аналогичных систем.
Согласно варианту осуществления изобретения вес mv транспортного средства может быть вычислен следующим образом, когда уклон α дороги определяется посредством информации из картографических данных и GPS-информации:
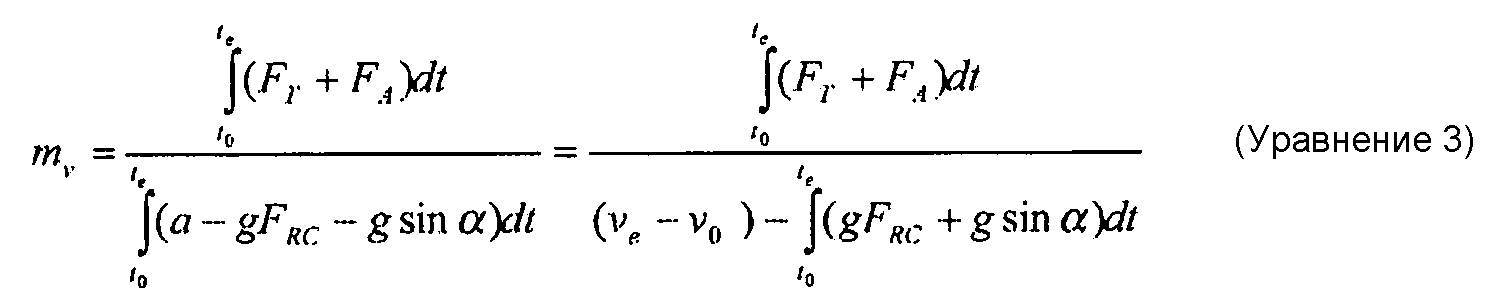
Как упомянуто выше, преимущество этого варианта осуществления в том, что ускорение a в уравнении для оценки заменено конечной скоростью ve минус начальная скорость v0. Дифференцирования зашумленного сигнала скорости таким образом можно избегать, тем самым улучшая качество оценки. Как указано выше, уравнение 3 может также быть задано для расстояния от x0 до xe вместо периода от t0 до te.
Согласно варианту осуществления изобретения уклон α дороги определяется на основе информации, предоставленной акселерометром. Когда используется информация акселерометра, вес mv транспортного средства может быть определен следующим образом:
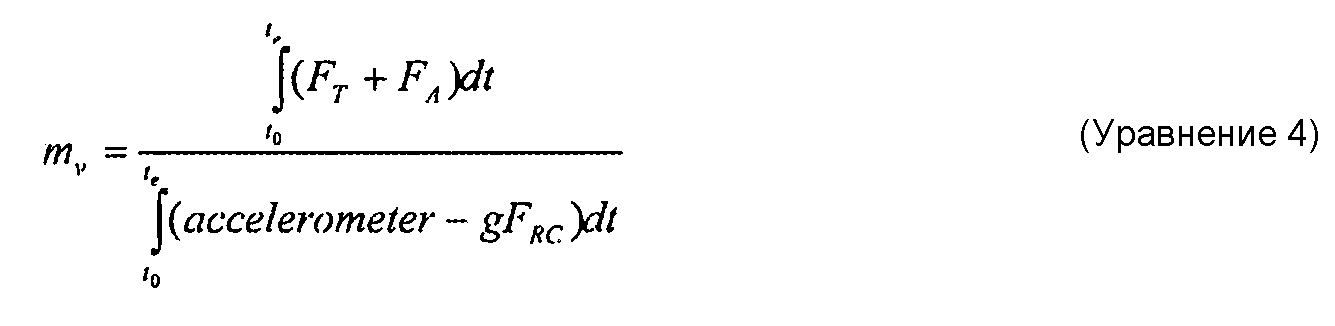
Акселерометр не может различать между ускорением a транспортного средства и компонентом гравитационного ускорения g, который действует в направлении акселерометра. Он, следовательно, измеряет как гравитационное ускорение g, так и ускорение a транспортного средства. Это делает возможным удаление в уравнении 4 выражения из уравнения 3. Как указано выше, уравнение 4 может также быть задано для расстояния от x0 до xe вместо периода от t0 до te.
Согласно варианту осуществления изобретения оценка веса mv транспортного средства основана на изменении в высоте над уровнем моря между начальной точкой и конечной точкой.
Изменение в высоте над уровнем моря транспортного средства, т.е. разница между начальной высотой над уровнем моря и конечной высотой над уровнем моря, может быть определено на основе данных топологической карты совместно с информацией позиционирования.
Изменение в высоте над уровнем моря между начальной точкой и конечной точкой может также быть определено на основе уклона α дороги для соответствующего участка дороги. Когда уклон α и время и/или расстояние, на протяжении которого транспортное средство движется, известны, различие высоты над уровнем моря относительно легко определить. Как описано выше, уклон α дороги может быть определен на основе информации топографической карты совместно с информацией позиционирования или на основе информации от акселерометра.
Изменение в высоте над уровнем моря между начальной точкой и конечной точкой может также быть определено на основе изменения в атмосферном давлении, воздействующем на транспортное средство. В этом случае первое измерение атмосферного давления выполняется в первоначальной точке, а второе измерение - в конечной точке, таким образом обнаруживая изменение высоты над уровнем моря.
Согласно варианту осуществления изменения следующее выражение может быть использовано для оценки веса транспортного средства на основе изменения высоты над уровнем моря, определенного, например, на основе картографических данных или атмосферного давления, как описано выше:

в котором
 - это разница в кинетической энергии;
- это разница в кинетической энергии;
 - это разница в потенциальной энергии;
- это разница в потенциальной энергии;
 - это потеря энергии; и
- это потеря энергии; и
 - это работа по продвижению, выполненная на протяжении расстояния от начальной точки x0 до конечной точки xe.
- это работа по продвижению, выполненная на протяжении расстояния от начальной точки x0 до конечной точки xe.
Таким образом, разница в кинетической энергии плюс разница в потенциальной энергии плюс потеря энергии должны быть равны работе по продвижению, выполненной на протяжении расстояния x0-xe. Потеря энергии может также быть выражена как

Разница в кинетической энергии может быть выражена как

Разница в потенциальной энергии может быть выражена как

в котором
 - это разница в высоте над уровнем моря между начальной точкой x0 и конечной точкой xe.
- это разница в высоте над уровнем моря между начальной точкой x0 и конечной точкой xe.
Согласно варианту осуществления изобретения вес mv транспортного средства, полученный тогда, равен
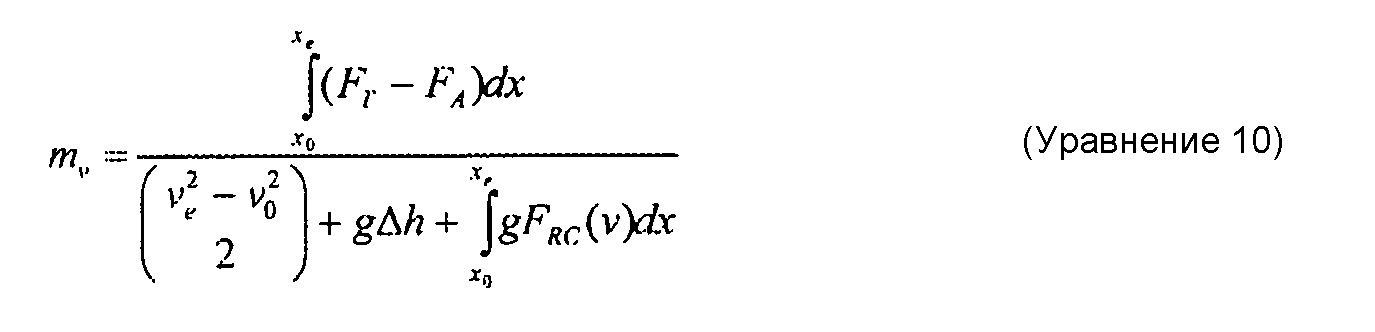
Уравнения 3, 4 и 10, все указывают способы оценки веса mv транспортного средства на основе интегрирования по периоду времени от t0 до te или расстоянию от x0 до xe. Преимущество базирования оценок на интегралах сил в том, что вычисление оценки фактически служит в качестве фильтра для возмущений. Поскольку оценки здесь интегрируются по относительно длительному периоду t0-te или относительно длинному расстоянию x0-xe, на них влияют очень незначительно временные погрешности вследствие, например, шума, свойственного уклону α дороги, скорости транспортного средства или некоторому другому параметру. Процедуры, представленные выше для оценки веса mv транспортного средства, следовательно, являются относительно нечувствительными к возмущениям.
Как упомянуто выше, оценки будут выполняться, когда движущая сила FT является большой относительно других сил, поскольку информации и точности для движущей силы FT больше, чем для других сил. Оценка может, например, выполняться, когда крутящий момент M двигателя превышает 90% максимального крутящего момента Mmax двигателя, или когда FT>x(FA+FR). Величина x непосредственно определяет здесь, сколько оценок будет выполнено в течение периода/расстояния и их качество. Большие значения для x дают в результате оценки, которые имеют хорошее качество, но их немного по числу. Источники погрешности, следовательно, минимизируются изобретением посредством выполнения оценок, т.е. вычисления алгоритма, в моменты времени, когда известно, что источники погрешности являются небольшими относительно сигналов, которые хорошо известны. Первоначальная точка t0 таким образом становится здесь моментом времени, когда удовлетворяется условие, что движущая сила FT является доминирующей относительно других сил. Конечная точка te становится моментом времени, когда условие больше не удовлетворяется или достигается наибольшее допустимое время периода t0-te.
Согласно варианту осуществления, чтобы оценка (вычисление) считалась достоверной(ым), она должна охватывать больший интервал, чем кратчайшее допустимое время (или больший интервал, чем кратчайшее допустимое расстояние). Она также должна охватывать меньший интервал, чем максимальное допустимое время (или меньший интервал, чем максимальное допустимое расстояние), что уменьшает число вычислений, если условие удовлетворяется в течение длительного времени/расстояния. Согласно варианту осуществления кратчайшее допустимое время равно 6 секундам, а самое продолжительное допустимое время равно 30 секундам. Альтернативно, кратчайшее и самое длинное допустимые времена составляют порядка 6 и 30 секунд, соответственно. Вычисления таким образом здесь ограничены охватом максимум меньшим, чем приблизительно 30 секунд для каждого вычисления.
Специалист в области техники поймет, что уравнения, изложенные выше для оценки веса mv транспортного средства, могут также быть заменены в целом, или частично, суммированием дискретных значений для затронутых параметров вместо интегрирований непрерывных значений для них.
Согласно варианту осуществления изобретения, когда оценка веса mv транспортного средства выполнена, она сохраняется в памяти. Когда более чем одна оценка веса mv транспортного средства выполнена, они усредняются, чтобы получать средний вес mv транспортного средства. Более чем одна оценка веса mv транспортного средства может также быть использована, чтобы получать срединное значение для веса mv транспортного средства, или может быть применен некоторый другой вид усреднения или фильтрации, чтобы выравнивать отдельные отклонения значения веса.
Согласно варианту осуществления настоящего изобретения каждой из оценок дается классификация, указывающая, насколько она достоверна. Эта классификация может, например, быть определена на основе того, насколько большим является крутящий момент M двигателя относительно максимального крутящего момента Mmax двигателя, или насколько большим является y в уравнении  т.е. насколько большой является движущая сила FT относительно общей суммы силы FA сопротивления воздуха и силы FR сопротивления качению. Эта классификация может затем быть использована, чтобы определять качество выполненных оценок.
т.е. насколько большой является движущая сила FT относительно общей суммы силы FA сопротивления воздуха и силы FR сопротивления качению. Эта классификация может затем быть использована, чтобы определять качество выполненных оценок.
Эта классификация может быть использована для решения относительно того, должны ли быть выполнены и/или сохранены дополнительные оценки. Согласно варианту осуществления другая оценка веса mv транспортного средства сохраняется в памяти, только если ее классификация выше, чем классификация уже сохраненной оценки. Согласно альтернативе, другая оценка веса mv транспортного средства также сохраняется в памяти, если она достигает, по существу, того же уровня классификации, что и уже сохраненная оценка.
Согласно другому варианту осуществления другие оценки выполняются, только если перспективы оценки более высокого класса, чем класс уже сохраненной в памяти оценки, являются хорошими, в таком случае выполняются только оценки, которые вероятно должны быть хорошего качества, следовательно, с последовательно высоким уровнем вычислительной эффективности для оценок веса mv транспортного средства. Должны ли оценки быть, вероятно, высокого качества, может здесь быть решено на основе того, насколько большим является крутящий момент M двигателя относительно максимального крутящего момента Mmax двигателя, или насколько большой является движущая сила FT относительно суммы силы FA сопротивления воздуха и силы FR сопротивления качению, как описано выше относительно классификации оценок.
Специалист в области техники поймет, что способ оценки веса mv двигателя согласно настоящему изобретению может также быть реализован в компьютерной программе, которая, когда выполняется на компьютере, инструктирует компьютеру применять способ. Компьютерная программа обычно принимает форму компьютерного программного продукта 103 (изображен на фиг.1), сохраненного на цифровом носителе хранения информации, и содержится на таком машиночитаемом носителе продукта, который содержит подходящую память, например ROM (постоянное запоминающее устройство), PROM (программируемое постоянное запоминающее устройство), EPROM (стираемое PROM), флэш-память, EEPROM (электрически стираемое PROM), запоминающее устройство на жестком диске и т.д.
Фиг.1 изображает схематично блок 100 управления, содержащий блок 101 вычисления, который может принимать форму, по существу, любого подходящего типа процессора или микрокомпьютера, например схему для цифровой обработки сигнала (цифровой сигнальный процессор, DSP) или схему с предварительно определенной специальной функцией (специализированная интегральная схема, ASIC). Блок 101 вычисления соединен с блоком 102 памяти, который расположен в блоке 100 управления и который предоставляет блоку вычисления, например, сохраненный программный код и/или сохраненные данные, которые необходимы блоку вычисления, чтобы предоставлять ему возможность выполнять вычисления. Блок 101 вычисления также приспособлен для сохранения частичных или конечных результатов вычислений в блоке 102 памяти.
Блок 100 управления дополнительно снабжен соответствующими устройствами 111, 112, 113, 114 для приема и отправки входных и выходных сигналов. Эти входные и выходные сигналы могут содержать колебания, импульсы или другие атрибуты, которые устройства 111, 113 приема входных сигналов могут обнаруживать в качестве информации и которые могут быть преобразованы в сигналы, обрабатываемые блоком 101 вычисления. Эти сигналы впоследствии передаются блоку 101 вычисления. Устройства 112, 114 отправки выходных сигналов выполнены с возможностью преобразования сигналов, принятых от блока 101 вычисления, например, посредством их модуляции, для того, чтобы создавать выходные сигналы, которые могут быть переданы другим частям системы управления транспортного средства, системам для выбора передачи или упреждающим системам круиз-контроля.
Каждое из соединений с соответствующими устройствами для приема и отправки входных и выходных сигналов может принимать форму одного или более из кабеля, шины данных, например CAN-шины (локальная сеть контроллеров), MOST-шины (шина передачи данных мультимедийных систем) или некоторой другой шинной конфигурации или беспроводного соединения.
Специалист в области техники поймет, что вышеупомянутый компьютер может принимать форму блока 101 вычисления и что вышеупомянутая память может принимать форму блока 102 памяти.
Настоящее изобретение относится также к системе для оценки веса mv транспортного средства. Эта система приспособлена основывать оценку на движущей силе FT и по меньшей мере одной дополнительной силе и на топографической информации для соответствующего участка дороги. Система согласно настоящему изобретению содержит средство сравнения движущей силы FT и по меньшей мере одной дополнительной силы. Система дополнительно приспособлена, чтобы выполнять оценки, когда по меньшей мере из двух сил, которые действуют на транспортное средство, т.е. движущей силы FT и по меньшей мере одной дополнительной силы, доминирует движущая сила FT.
Согласно варианту осуществления изобретения средство выполнения сравнения приспособлено, чтобы определять, что движущая сила FT является доминирующей, если она значительно больше, чем по меньшей мере одна дополнительная сила.
Использование системы согласно изобретению дает в результате, как описано выше относительно способа согласно изобретению, оценки, которые менее подвержены влиянию источников погрешностей, поскольку они выполняются только тогда, когда они, главным образом, затрагивают сигналы, которые система знает и которые имеют хорошее качество.
Фиг.2 изображает данные из поездки, когда настоящее изобретение было использовано для оценки веса mv транспортного средства. Нижняя кривая представляет движущую силу FT, средняя кривая - скорость v транспортного средства, а верхняя кривая - оценку веса mv транспортного средства. Как может быть видно, оценка изменяется между 20000 и 22500 кг в течение больших частей поездки. Правильный вес mv тестового транспортного средства во время поездки был 21200 кг. Применение изобретения таким образом дает в результате хорошую оценку веса mv транспортного средства. Оценки согласно изобретению являются значительно более точными, чем оценки согласно ранее известным способам оценки веса mv транспортного средства.
Специалист в области техники также поймет, что вышеописанная система может быть модифицирована согласно различным вариантам осуществления способа согласно изобретению. Изобретение относится также к моторному транспортному средству, например грузовому автомобилю или автобусу, снабженному по меньшей мере одной системой для оценки веса mv транспортного средства. Настоящее изобретение не ограничено вариантами осуществления изобретения, описанными выше, а относится к и содержит все варианты осуществления в рамках защиты приложенных независимых пунктов формулы изобретения.
Кровать с изменяемыми размерами
Устройство для приведения в действие системы управления уровнем подвески в транспортном средстве
Инструментальный отсек и узел панели, предназначенный для него
Устройство для охлаждения рециркулирующих выхлопных газов двигателя внутреннего сгорания
Устройство для расцепления привода
Конструкция и способ для демпфирования перемещения поршня
Способ и устройство для изменения восприятия рулевого управления в механизме рулевого управления транспортного средства, а также транспортное средство, содержащее такое устройство
Модуль для системы управления транспортным средством
Модуль для определения опорных значений для системы управления транспортным средством
Способ и модуль для управления скоростью транспортного средства
Кровать с изменяемыми размерами
Устройство для приведения в действие системы управления уровнем подвески в транспортном средстве
Инструментальный отсек и узел панели, предназначенный для него
Устройство для охлаждения рециркулирующих выхлопных газов двигателя внутреннего сгорания
Устройство для расцепления привода
Конструкция и способ для демпфирования перемещения поршня
Способ и устройство для изменения восприятия рулевого управления в механизме рулевого управления транспортного средства, а также транспортное средство, содержащее такое устройство
Модуль для системы управления транспортным средством
Модуль для определения опорных значений для системы управления транспортным средством
Способ и модуль для управления скоростью транспортного средства

