Результат интеллектуальной деятельности: АВТОМАТИЗИРОВАННАЯ СИСТЕМА ВЫЯВЛЕНИЯ НАРУШЕНИЙ ПРАВИЛ ДОРОЖНОГО ДВИЖЕНИЯ ПРИ ПРОЕЗДЕ ПЕРЕКРЕСТКА, ЖЕЛЕЗНОДОРОЖНОГО ПЕРЕЕЗДА ИЛИ ПЕШЕХОДНОГО ПЕРЕХОДА
Вид РИД
Изобретение
Область техники, к которой относится изобретение
Настоящее изобретение относится к области регулирования движения транспортных средств (далее - ТС), в частности к устройствам контроля соблюдения правил дорожного движения (далее - ПДД), в том числе соблюдения скоростного режима, и предназначено для осуществления автоматического контроля дорожно-транспортной обстановки и соблюдения правил дорожного движения на перекрестках, железнодорожных переездах и пешеходных переходах.
Уровень техники
Из существующего уровня техники известен комплекс контроля проезда автотранспорта через автомобильный перекресток «АвтоУраган» (http://www.recognize.ru/node/18), позволяющий в автоматическом режиме выявлять нарушения, связанные с проездом на запрещающий сигнал светофора. Комплекс содержит телекамеру с широким углом обзора для видеорегистрации общей картины дорожной обстановки, а также несколько расположенных над каждой полосой проезжей части телекамер с узким углом обзора, предназначенных для видеорегистрации деталей ТС. Информация с телекамер о каждом ТС, пересекающем перекресток, поступает во всепогодный уличный шкаф-сервер, автоматически обрабатывается и далее передается в центр обработки данных по имеющимся каналам связи. В процессе компьютерной обработки фото- и видеоматериала осуществляется распознавание визуально читаемых государственных регистрационных знаков ТС (далее - ГРЗ ТС), пересекающих зону контроля. Видеозапись нарушения с обзорной камеры получают путем извлечения видеофрагмента из полного цикла видеозаписи, находящегося в буферной памяти, включающего пятисекундный интервал до нарушения, непосредственно само нарушение и пятисекундный интервал после нарушения. На всех кадрах видеозаписи виден сигнал светофора со стороны движения ТС нарушителя.
Данное техническое решение включает в себя большое количество аппаратных технических средств, имеет большое число связей между функциональными узлами системы, что значительно усложняет ее работу, существенно повышает нагрузку на линии передачи информации, ограничивает число параметров, подлежащих контролю, и не позволяет достаточно эффективно осуществлять контроль дорожной ситуации на многополосных дорогах, а также их пересечении особенно при плотном транспортном потоке. К недостаткам системы можно отнести и то, что фиксация нарушений возможна только в том случае, когда ГРЗ ТС визуально различим. Кроме того, существенным недостатком данного технического решения является необходимость монтажа элементов системы над каждой контролируемой полосой движения с помощью специальных консольных или арочных конструкций, строительство которых не всегда возможно вблизи железнодорожных переездов. Необходимость установки дополнительных удерживающих конструкций существенно удорожает проект, и осложняет процесс технического обслуживания оборудования, так как для очистки иллюминаторов телекамер потребуется перекрытие движения на данном участке дороги.
Также известна система выявления нарушений ПДД вида «проезд на запрещающий сигнал светофора» при проезде перекрестка, описанная в заявке на полезную модель CN 201247530 (Y), опубл. 27.05.2009 и система выявления нарушений ПДД видов «проезд на запрещающий сигнал светофора» и «остановка перед стоп-линией при запрещающем сигнале светофора» при проезде перекрестка, описанная в документе RU 2534131, опубл. 27.11.2014. Эти системы содержат соединенные между собой обзорную телекамеру, выполненную с возможностью формирования изображения ТС нарушителя в момент пересечения стоп-линий, светофорную телекамеру, выполненную с возможностью формирования изображения сигналов светофора в момент пересечения стоп-линий ТС нарушителя, а также электронно-вычислительное устройство, выполненное с возможностью обработки информации с обеих телекамер с целью выявления указанных нарушений ПДД.
Данные технические решения также имеют существенные ограничения при их эксплуатации в условиях высокой плотности транспортного потока, не позволяют осуществлять одновременный контроль и фиксацию параметров движения всех участников движения, перемещающихся как в прямом, так и во встречном направлениях, а также участников движения, перемещающихся по разным полосам проезжей части на многополосных дорогах. Кроме того, использующийся в них исключительно оптический метод выявления нарушений ПДД, не обеспечивает достаточную достоверность их выявления, не исключает возникновения спорных случаев, в том числе и тех случаев, при которых требуется проведение дополнительной экспертизы. К недостаткам указанных систем также можно отнести то, что эти устройства имеют возможность регистрировать весьма ограниченный перечень нарушений (два вида нарушений правил дорожного движения). Кроме того, выявление нарушений, при использовании указанных выше систем, возможно только в том случае, когда ГРЗ ТС подлежит автоматическому распознаванию.
Наиболее близким к заявленному изобретению является упомянутая выше система определения нарушений правил дорожного движения при проезде перекрестка, описанная в документе RU 2534131, опубл. 27.11.2014. Данная система выбрана в качестве прототипа заявленного изобретения.
Задачей, на решение которой направлено заявляемое изобретение, является осуществление точного дискретного контроля параметров движения всех ТС, движущихся как в прямом, так и в обратном направлениях, с автоматизированным выявлением нарушителей ПДД на перекрестке, железнодорожном переезде либо пешеходном переходе, в том числе в условиях сложной дорожной обстановки, а также при наличии ошибок в процессе распознавания ГРЗ ТС, вызванных низкой различимостью ГРЗ ТС вследствие их загрязненности, низким контрастом полученных фотоснимков, а также засветками.
Раскрытие изобретения
Данная задача решается за счет того, что заявленная автоматизированная система контроля дорожно-транспортной обстановки и выявления нарушений правил дорожного движения при проезде перекрестка, железнодорожного переезда или пешеходного перехода, содержащая по меньшей мере одну распознающую телекамеру, выполненную с возможностью формирования видеоизображения, включающего в себя вид транспортного средства спереди и перекресток с примыкающими к нему территориями, подлежащими контролю, по меньшей мере одну обзорную телекамеру, выполненную с возможностью формирования видеоизображения, включающего в себя вид транспортного средства сзади, сигнал светофора и перекресток с примыкающими к нему территориями, подлежащими контролю, по меньшей мере один процессорный блок, выполненный с возможностью получения, записи, хранения и передачи данных о произошедших нарушениях правил дорожного движения «об остановке перед стоп-линией при запрещающем сигнале светофора» и «проезд на запрещающий сигнал светофора» на удаленный сервер обработки информации по беспроводному или проводному каналу передачи данных, а также распознавания государственных регистрационных знаков транспортных средств, и по меньшей мере один модуль связи. Система отличается тем, что дополнительно содержит по меньшей мере один радиолокационный модуль, выполненный с возможностью измерения скорости, дальности и азимутального угла положения транспортного средства и связанный по меньшей мере с одной распознающей телекамерой и по меньшей мере одним процессорным блоком, при этом процессорный блок выполнен с возможностью вычисления траекторий движения транспортных средств в зоне контроля, выполняемого на основе данных, полученных с телекамер, и раздельно на основе данных, полученных с радиолокационного модуля с последующим наложением результатов вычислений и их совместной обработки.
Радиолокационный модуль, процессорный блок, распознающая телекамера и модуль связи предпочтительно представляют собой единый фоторадарный блок.
Фоторадарный блок может дополнительно содержать, по меньшей мере, один навигационный модуль, выполненный с возможностью точного определения времени и географических координат и возможностью автоматической коррекции системного времени и даты по спутниковым сигналам ГЛОНАСС/GPS.
Фоторадарный блок может дополнительно содержать встроенный ИК-прожектор.
Система может дополнительно содержать внешний блок связи, связанный по меньшей мере с одной обзорной телекамерой и через по меньшей мере один модуль связи по меньшей мере с одним процессорным блоком.
Внешний блок связи предпочтительно выполнен с возможностью обеспечения проводного или беспроводного канала связи.
По меньшей мере один модуль связи может быть выполнен с возможностью обеспечения проводного или беспроводного канала связи.
Процессорный блок может быть выполнен с возможностью сбора статистических данных по скоростям, направлениям, полосам движения транспортных средств и данных об интегральной интенсивности транспортного потока.
Система может дополнительно содержать резервный беспроводной канал связи, обеспечивающий возможность загрузки данных о зафиксированных нарушениях непосредственно на компьютер патрульного автомобиля.
Система может быть установлена на обочине рядом с краем проезжей части.
Техническим результатом, обеспечиваемым приведенной совокупностью признаков, является существенное повышение точности и достоверности идентификации целей и, как следствие, выявления нарушителей ПДД, в том числе в условиях сложной дорожной обстановки, а также при наличии ошибок в процессе распознавания ГРЗ ТС, вызванных низкой различимостью ГРЗ ТС вследствие их загрязненности, низким контрастом полученных фотоснимков, а также засветками. Кроме того, техническим результатом является расширение функциональных возможностей системы. В частности, заявленная система позволяет осуществлять точный дискретный контроль скорости и координат всех ТС в зоне контроля, движущихся как в прямом, так и в обратном направлениях на перекрестке, железнодорожном переезде либо пешеходном переходе, вычислять траектории движения каждого ТС в зоне контроля, формировать фото- и видеоизображения нарушений ПДД, связанных с превышением скоростного режима, движением по встречной полосе, по обочине, по полосе для маршрутных ТС, по тротуару, движением при запрещающем сигнале светофора, а также осуществлять сбор статистических данных по скоростям, направлениям, полосам движения ТС и данных об интегральной интенсивности транспортного потока. Кроме того, заявленная система позволяет осуществлять контроль участков дорог с многополосным движением посредством одного устройства.
Краткое описание чертежей
Сущность изобретения поясняется чертежами.
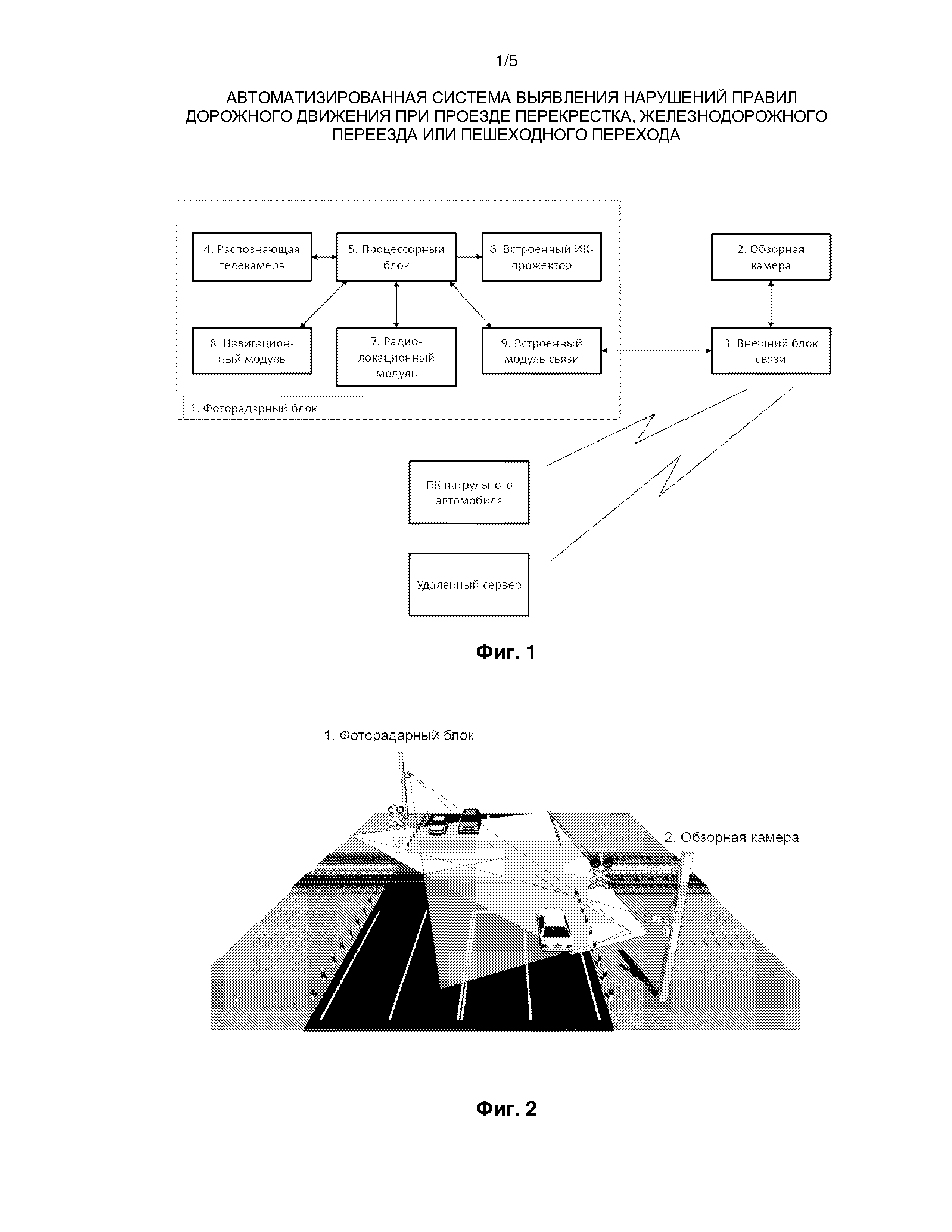
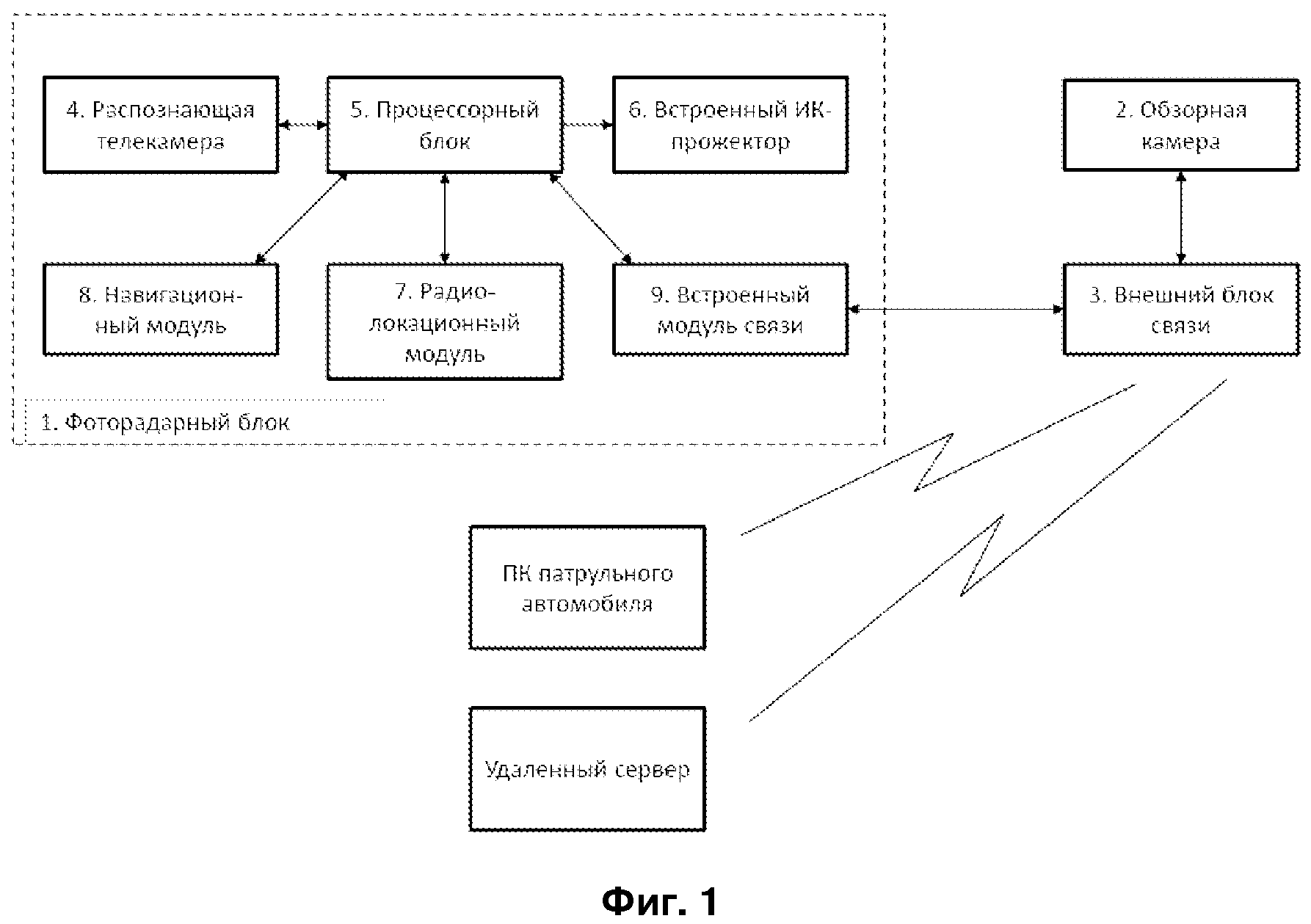
На Фиг.1 изображена блок-схема заявляемой системы.
На Фиг.2 показана 3D-схема размещения системы на железнодорожном переезде.
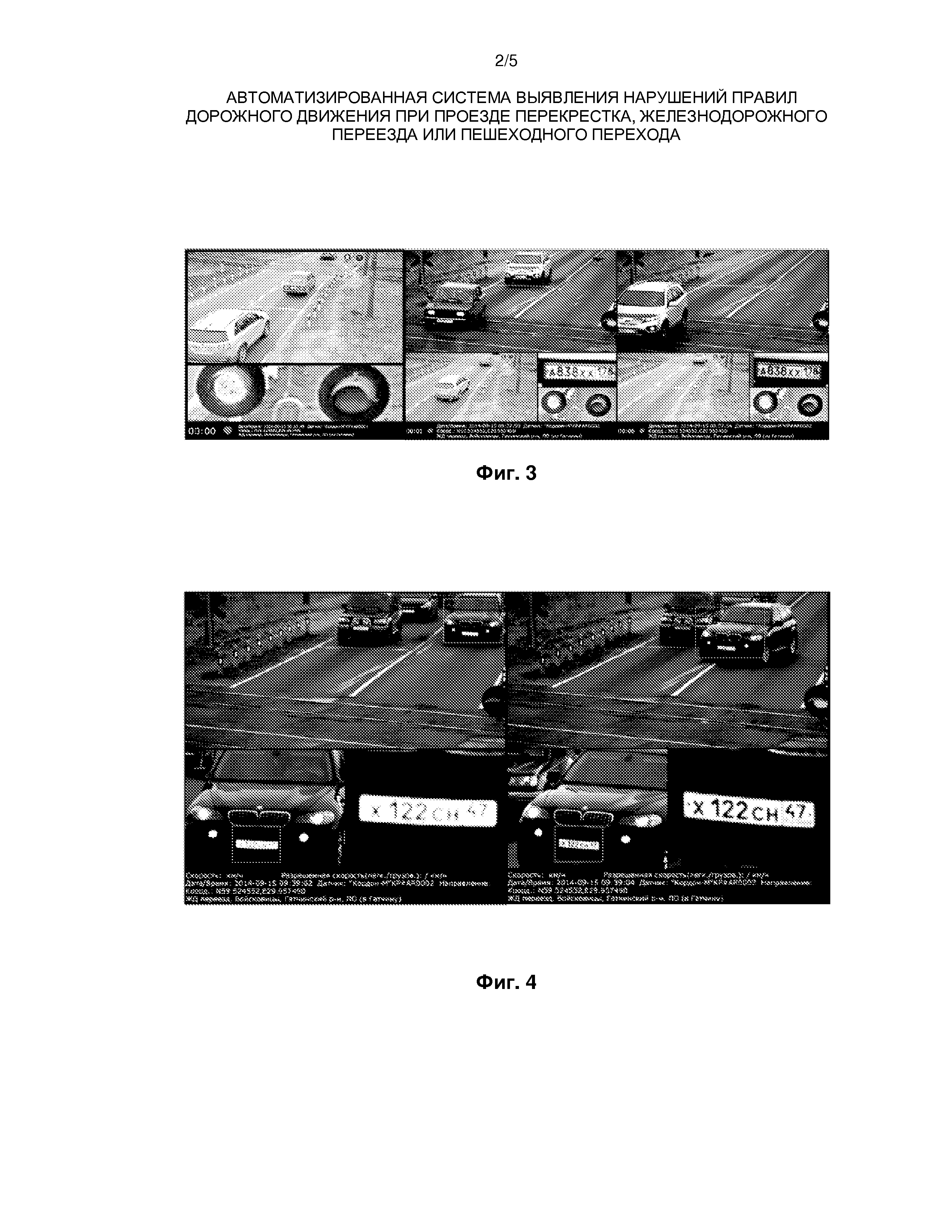
На Фиг.3 приведены примеры зафиксированных изображений с обзорной и распознающей телекамер, иллюстрирующие виды нарушений ПДД «остановка перед стоп-линией при запрещающем сигнале светофора» и «проезд на запрещающий сигнал светофора».
На Фиг.4 приведен пример зафиксированных изображений с обзорной и распознающей телекамер, иллюстрирующий вид нарушения ПДД «выезд на встречную полосу».
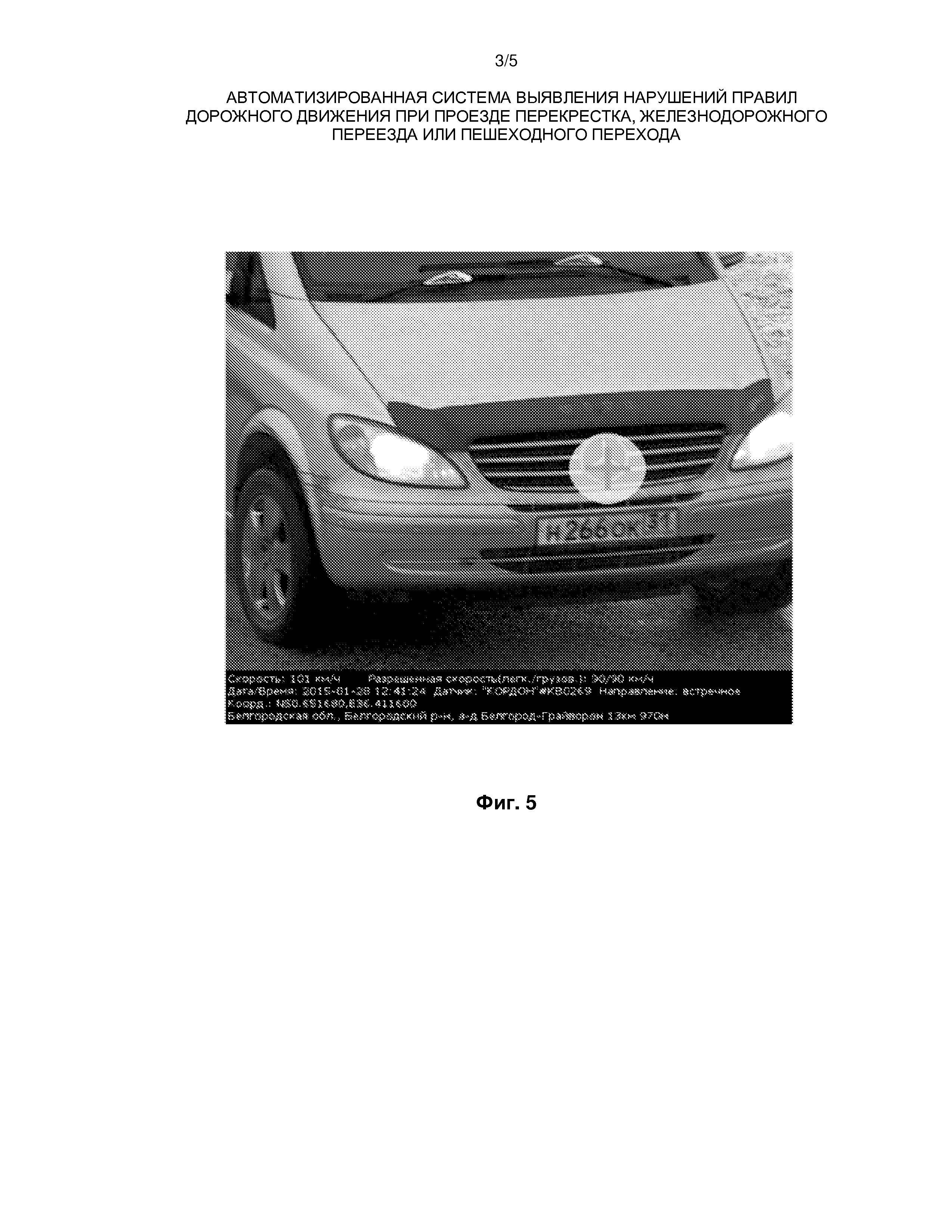
На Фиг.5 приведен пример зафиксированного изображения с распознающей телекамеры, иллюстрирующий вид нарушения ПДД «превышение скорости».
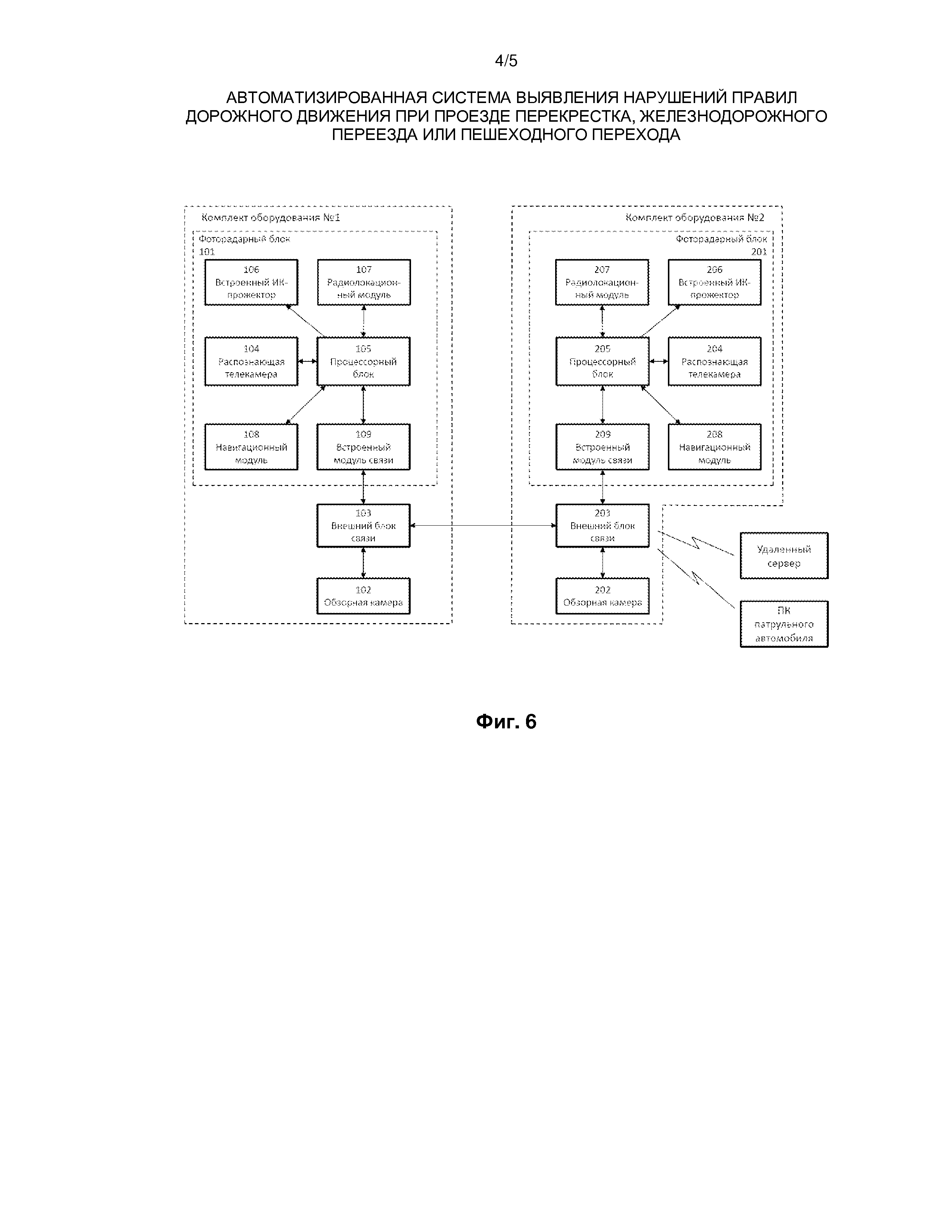
На Фиг.6 изображена блок-схема одной из возможных конфигураций системы: совместная работа двух комплектов оборудования заявляемой системы.
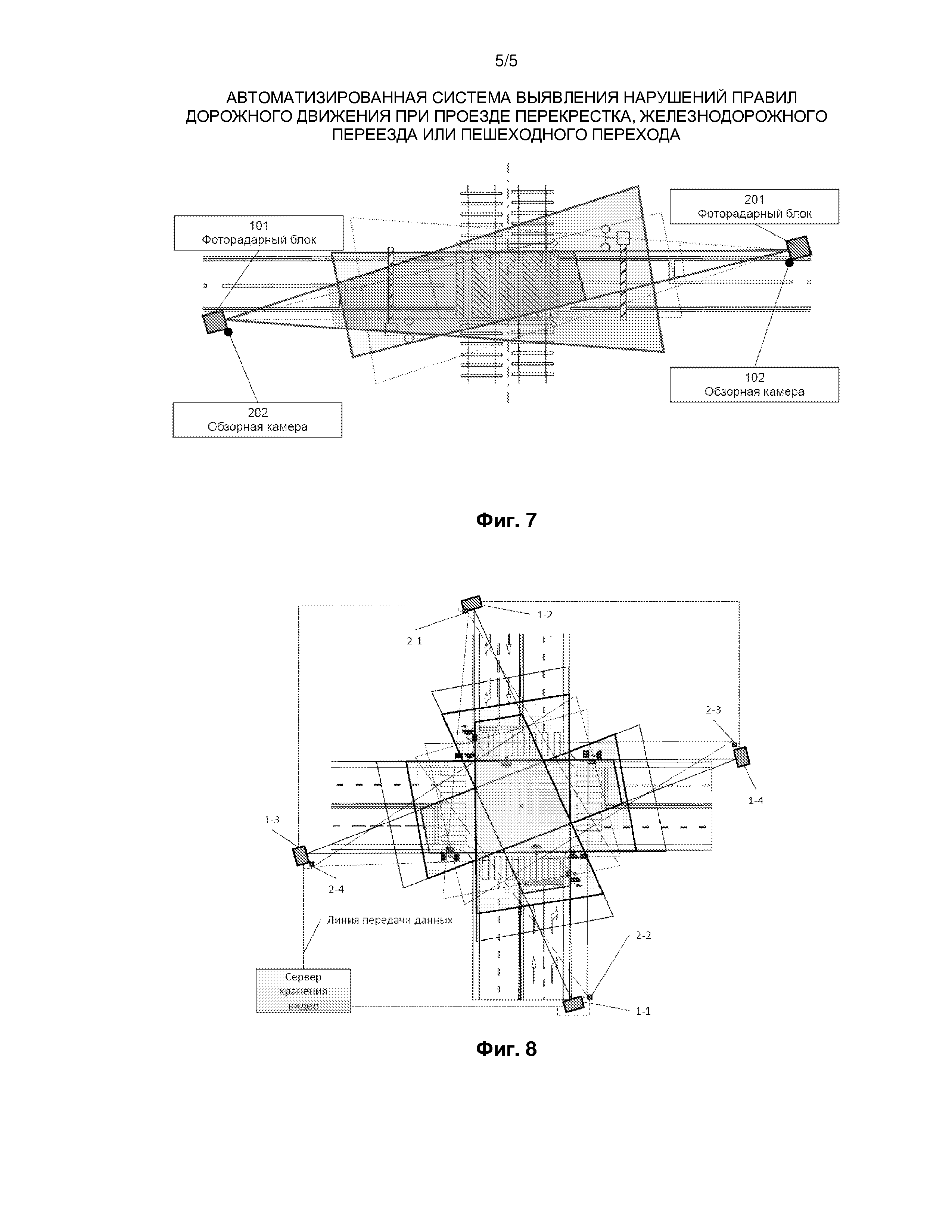
На Фиг.7 показана 2D-схема размещения системы на железнодорожном переезде (вид сверху) при использовании двух комплектов оборудования заявляемой системы.
На Фиг.8 показана 2D-схема размещения системы на перекрестке (вид сверху) с использованием четырех комплектов оборудования заявляемой системы.
Осуществление изобретения
На блок-схеме заявленной системы, приведенной на Фиг. 1, приняты следующие обозначения: 101 - фоторадарный блок, 102 - обзорная телекамера, 103 - внешний блок связи, 104 - распознающая телекамера, 105 - процессорный блок, 106 - встроенный ИК-прожектор, 107 - радиолокационный модуль, 108 - навигационный модуль, 109 - модуль связи.
Система в общем случае состоит из фоторадарного блока 101, обзорной телекамеры 102 и внешнего блока 103 связи. Фоторадарный блок 101, в свою очередь, включает в себя распознающую телекамеру 104, процессорный блок 105, встроенный ИК-прожектор 106, радиолокационный модуль 107, навигационный модуль 108 и модуль связи 109.
Как показано на Фиг.2, фоторадарный блок 101 и обзорная телекамера 102 устанавливаются на обочине рядом с краем проезжей части на расстоянии от ее края 0,5…4 м на высоте нескольких метров на стационарной конструкции (мачта освещения, опора фермы и т.д.), установленной сбоку от контролируемого участка дороги. Зоны контроля фоторадарного блока 101 и обзорной телекамеры 102 имеют протяженность несколько десятков метров и охватывают весь переезд (перекресток, пешеходный переход): полосы попутного и встречного движения перед переездом (перекрестком, пешеходным переходом) и за ним. Обзорная телекамера 102 устанавливается со стороны водителя ТС, подъезжающего к переезду. С другой стороны переезда устанавливается фоторадарный блок 101, включающий в себя распознающую телекамеру 104 высокого разрешения. Фоторадарный блок 101 и обзорная телекамера 102 ориентируются на зону контроля с помощью подключаемого по сети Wi-Fi мобильного компьютера либо установочного интерфейса сенсорного экрана. Установка требуемых параметров работы системы (контролируемое направление движения ТС, ввод места установки и максимальной разрешенной скорости на данном участке дороги, настройка телекамеры и др.) осуществляется удаленно через Web-интерфейс с помощью компьютера.
Обзорная телекамера 102 представляет собой широкоугольную телекамеру, используемую для видеосъемки общей дорожно-транспортной обстановки в зоне контроля со стороны водителя; ее оптические параметры подобраны таким образом, чтобы иметь возможность уверенного распознавания цвета сигналов светофора перед перекрестком (переездом, пешеходным переходом) оптическим способом, а также видеосъемки ТС сзади.
Распознающая телекамера 104 представляет собой широкоугольную телекамеру высокого разрешения, позволяющая осуществлять видеоконтроль дорожной обстановки и распознавание ГРЗ ТС спереди.
Посредством внешнего 103 блока связи информация с обзорной телекамеры 102 передается через модуль 109 связи на процессорный блок 105 фоторадарного блока 101.
Процессорный блок 105 получает и обрабатывает информацию, поступающую с телекамер 102 и 104, радиолокационного модуля 107 и навигационного модуля 108. Кроме того, процессорный блок 105 имеет функцию настройки виртуальной стоп-линии, пересечение которой рассматривается как выезд на переезд (перекресток, пешеходный переход), и функцию управления параметрами телекамер 102 и 104, встроенного ИК-прожектора 106, а также радиолокационного модуля 107.
Радиолокационный модуль 107, включающий в себя передающую радиоантенну, две приемные радиоантенны и доплеровский измеритель скорости, фиксирует скорость каждого ТС, находящегося в зоне контроля, измеряет дальность и азимутальный угол положения одного или нескольких ТС, скорость которых зафиксирована, и передает данные о скорости, дальности до ТС и азимутальном угле положения этого ТС на входы процессорного блока 105. Радиолокационный модуль 107 идентифицирует параметры всех ТС, находящихся в зоне контроля не менее чем на двух ближайших полосах движения (либо не менее чем на четырех ближайших полосах движения в зависимости от используемого типа модуля).
Навигационный модуль 108 включает в себя антенну модема диагностического канала и ГЛОНАСС/GPS-приемник.
Работает система следующим образом.
Изображения, полученные с телекамер 102 и 104, посредством устройства 103 связи и модуля 109 связи в закодированном виде в режиме онлайн транслируются на соответствующие входы процессорного блока 105. Процессорный блок 105 осуществляет обработку полученных видеопотоков, в результате которой осуществляется:
- распознавание ГРЗ каждого ТС в зоне контроля,
- анализ движения ГРЗ ТС в кадре для вычисления траектории движения каждого ТС в зоне контроля по оптическим данным,
- определение цвета сигнала светофора на переезде в каждом зафиксированном кадре.
Одновременно с вышеупомянутыми процессами радиолокационный модуль 107 принимает отраженные сигналы от каждого ТС (каждой цели), находящегося в зоне контроля, измеряет скорость движения этих целей и передает информацию о координатах и скоростях каждой цели на соответствующие входы процессорного блока 105. Процессорный блок 105, в свою очередь, производит вычисление траектории движения каждого ТС и осуществляет сравнение оптических данных о траекториях движения каждого ТС в зоне контроля, полученных с телекамер 102 и 104, с данными о траекториях движения каждого ТС в зоне контроля, полученными от радиолокационного модуля 107. В результате указанных операций в процессорном блоке 105 формируются уточненные данные о траектории движения каждого ТС в зоне контроля. При возникновении ошибки при определении координат положения ТС на дорожном полотне (при потере цели) в какой-то момент времени, вычисление траектории движения ТС в процессорном блоке 105 происходит посредством восстановления потерянных данных по соседним измерениям.
Наложение результатов анализа движения ТС в зоне контроля, полученных от двух независимых друг от друга информационных источников, - телекамер 102, 104 и радиолокационного модуля 107 - позволяет:
- существенно снизить влияние случайных ошибок на результат вычисления траектории движения ТС,
- увеличить достоверность выявления нарушения,
- достичь высокой достоверности идентификации целей: точно определить, какому транспортному средству с данным ГРЗ соответствует измеренная скорость и траектория в случаях, когда в зоне контроля присутствует несколько целей.
При этом также снижаются вероятность пропуска и вероятность ошибок при идентификации нарушителей в условиях сложной дорожной обстановки на многополосных дорогах при интенсивном движении.
При наличии ошибок в процессе распознавания государственных регистрационных знаков ТС, вызванных низкой различимостью государственных регистрационных знаков вследствие их загрязненности, низким контрастом полученных фотоснимков, засветками либо по причине загрязненности объектива распознающей телекамеры 104, за счет совместной обработки данных, поступающих с телекамер 102, 104 и радиолокационного модуля 107, процессорный блок 105 направит информацию о выявленном нарушении на удаленный сервер Центра Обработки Данных (ЦОД) вне зависимости от того, было ли успешно осуществлено распознавание ГРЗ ТС нарушителя, было осуществлено частично (отдельные символы не были распознаны) либо распознавание не было осуществлено вследствие указанных выше ошибок и помех.
Навигационный модуль 108 передает на соответствующий вход процессорного блока 105 точные данные о GPS-координатах каждого ТС в зоне контроля, а также данные о текущем времени, что позволяет не прибегать к синхронизации по времени между отдельными модулями системы, упрощая функционирование системы.
После совместной обработки данных процессорный блок 105 осуществляет автоматическое выявление нарушителей ПДД. В процессе обработки формируются общая фотография переезда (перекрестка, пешеходного перехода), увеличенная фотография нарушителя (с распознанным ГРЗ ТС) и/или фотографии дорожной обстановки, сделанные с заданным интервалом, фотография световой индикации светофора. Процессорный блок 105 также выделяет из буферной памяти видеофрагменты заданной длительности, полученные с обзорной и распознающей телекамер 102 и 104, содержащие нарушение и цвет сигнала светофора. Кроме того, данные о нарушении ПДД содержат зафиксированную скорость ТС, направление движения, дату и время нарушения, значение максимально допустимой скорости на данном участке дороги, место нарушения, код местоположения и служебные данные (серийный номер устройства регистрации и т.п.).
Информация о нарушениях ПДД после компьютерной обработки по беспроводной линии передачи данных (LTE, 3G, GPRS и т.п.) либо по проводной линии связи (Ethernet или ВОЛС) поступает на удаленный сервер Центра Обработки Данных (ЦОД). При необходимости загрузка данных о зафиксированных нарушениях может быть осуществлена непосредственно на компьютер патрульного автомобиля по резервному беспроводному каналу связи.
В памяти процессорного блока 105, кроме информации обо всех ТС, проследовавших через перекресток, переезд либо пешеходный переход, и параметрах их движения (ГРЗ ТС, скорость, траектория движения), также содержится информация статистического характера: данные по скоростям, направлениям, полосам движения ТС и данные об интегральной интенсивности транспортного потока.
На Фиг. 3, 4 и 5 приведены примеры различных нарушений, зафиксированных системой.
Удобна в применении конфигурация, содержащая две идентичные заявляемые системы, работающие синхронно, информационно связанные друг с другом. Блок-схема такой конфигурации показана на Фиг .6. Далее в настоящем изобретении эту конфигурацию системы будем называть «двойной системой».
На блок-схеме, приведенной на Фиг. 6, все функциональные узлы систем пронумерованы в соответствии с правилом: первая цифра в обозначении указывает, к какой из двух систем относится тот или иной функциональный узел (к первой или ко второй), а две последующие - нумеруют каждый элемент в соответствии с принятыми в настоящей заявке обозначениями. Так, фоторадарный блок, имеющий обозначение на данной блок-схеме 101, относится к первой системе. Функционально фоторадарный блок 101 связан с обзорной телекамерой 102, расположенной на противоположной стороне перекрестка (переезда, пешеходного перехода) и относящейся также к первой системе.
Использование двойной системы особенно удобно при размещении комплекса на многополосных переездах, перекрестках и пешеходных переходах. Размещение элементов системы на железнодорожном переезде, а также зоны контроля каждого регистрирующего элемента показаны на Фиг. 7. Зоны контроля фоторадарных блоков 101 и 201 обозначены пунктиром, зоны контроля обзорных телекамер 102 и 202 - сплошной линией.
Как видно из Фиг. 7, обзорная телекамера 102 и фоторадарный блок 201 устанавливаются с одной стороны переезда (перекрестка, пешеходного перехода), а с другой стороны переезда устанавливаются фоторадарный блок 101 и обзорная телекамера 202. Таким образом, зона контроля участка дорожного полотна, содержащего весь переезд (перекресток, пешеходный переход) и прилегающие территории, может быть значительно увеличена без потери в разрешении получаемой видеоинформации, что позволяет дополнительно осуществлять фиксацию таких видов нарушений ПДД, как «проезд по обочине» и «проезд по тротуару».
Как было указано выше, фоторадарный блок 101 функционально связан с обзорной телекамерой 102, но при необходимости фоторадарный блок 101 может получать информацию и с обзорной телекамеры 202, расположенной на той же мачте, что и фоторадарный блок 101.
Среди преимуществ использования двойной системы можно указать и то, что в этом случае каждый из радиолокационных модулей (107 и 207) может осуществлять измерение скоростей ТС, движущихся как встречно по отношению к модулю, так и попутно («ближние попутные, дальние встречные»). Распознавание ГРЗ ТС, движущихся навстречу фоторадарному блоку 101, также может осуществляться как спереди ТС, так и сзади посредством фоторадарного блока 201.
Заявленная система позволяет выявлять следующие виды нарушений ПДД:
- «проезд на запрещающий сигнал светофора»,
- «об остановке перед стоп-линией при запрещающем сигнале светофора»,
- «превышение установленной скорости движения»,
- «выезд на полосу, предназначенную для встречного движения, либо на трамвайные пути встречного направления»,
- «пересечение сплошной линии разметки проезжей части дороги»,
- «движение под запрещающий знак»,
- «поворот налево или разворот в нарушение требований, предписанных дорожными знаками или разметкой проезжей части дороги»,
- «движение во встречном направлении по дороге с односторонним движением»,
- «превышение установленной скорости движения ТС в жилых зонах»,
- «движение по тротуару»,
- «движение по обочине».
На перекрестках многополосных дорог с интенсивным транспортным потоком, как показано на Фиг. 8, может быть применен комплекс, содержащий две двойные системы, которые могут работать как совместно, так и самостоятельно друг от друга. Обозначения основных блоков каждой из четырех систем отражают функциональную связь между этими устройствами.
Таким образом, обеспечивается существенное повышение точности и достоверности идентификации целей и, как следствие, выявления нарушителей ПДД, в том числе в условиях сложной дорожной обстановки, а также при наличии ошибок в процессе распознавания ГРЗ ТС, вызванных низкой различимостью ГРЗ ТС вследствие их загрязненности, низким контрастом полученных фотоснимков, а также засветками.
Радиолокационный видеофиксирующий измеритель скорости транспорта и способ определения цели-нарушителя
Комплекс видеофиксации и измерения скорости движения и координат транспортных средств
Способ определения положения и скорости движения транспортного средства на дороге и комплекс для его осуществления
Способ измерения габаритной длины транспортных средств, способ измерения расстояния между ними и устройство для их реализации
Система предупреждения столкновений участников дорожного движения
Многоцелевой многополосный лазерный измеритель параметров движения транспорта с видеофиксацией
Способ автоматического контроля дорожного движения и система, его реализующая
Радиолокационный видеофиксирующий измеритель скорости транспорта и способ определения цели-нарушителя
Комплекс видеофиксации и измерения скорости движения и координат транспортных средств
Способ определения положения и скорости движения транспортного средства на дороге и комплекс для его осуществления
Способ измерения габаритной длины транспортных средств, способ измерения расстояния между ними и устройство для их реализации
Система предупреждения столкновений участников дорожного движения
Многоцелевой многополосный лазерный измеритель параметров движения транспорта с видеофиксацией
Учебно-тренировочный снаряд
Способ автоматического контроля дорожного движения и система, его реализующая

