Результат интеллектуальной деятельности: СИСТЕМА И СПОСОБ ОБНАРУЖЕНИЯ ВИНТОКРЫЛЫХ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ
Вид РИД
Изобретение
Изобретение относится к системам безопасности, предназначенным для предотвращения несанкционированного доступа винтокрылых беспилотных летательных аппаратов (БПЛА) в контролируемую зону и отслеживания перемещения винтокрылых БПЛА в контролируемой зоне с одновременной их аутентификацией, а именно к системам и способам обнаружения винтокрылых беспилотных летательных аппаратов. Изобретение может применяться в составе комплексных систем безопасности.
В настоящее время существуют системы и способы обнаружения винтокрылых БПЛА, основанные на радиочастотных и акустических датчиках. Существующие системы и способы обнаружения винтокрылых БПЛА с использованием радиочастотных датчиков обнаруживают источники радиоизлучения, которыми в винтокрылых БПЛА являются системы управления или передачи телеинформации, определяют их координаты при помощи гониометрических методов и других высокоточных методов определения координат.
Существующие акустические системы и способы обнаружения летательных аппаратов включают набор акустических датчиков или акустических антенн, предназначенных для приема акустических сигналов, блоки обработки, классификации и определения координат источников акустических сигналов.
Наиболее близкими к заявленному изобретению являются система и способ обнаружения винтокрылых беспилотных летательных аппаратов, описанные в патенте US 7957225 В2, в которых принимают акустический сигнал с помощью набора акустических датчиков, классифицируют источник акустического сигнала на основе спектрального анализа акустического сигнала, определяют горизонтальные координаты и высоту источника акустического сигнала на основе анализа, по меньшей четырех акустических сигналов, полученных от четырех акустических датчиков. Данные система и способ выбраны в качестве прототипов заявленного изобретения.
Недостатком системы и способа прототипов является недостаточная точность определения типа и параметров винтокрылого БПЛА и информативность данных о винтокрылом БПЛА вследствие отсутствия возможности автоматического видео-наблюдения за винтокрылым БПЛА в дополнение к методам обнаружения БПЛА с помощью спектрального и временного анализа акустического сигнала.
Задачей заявленного изобретения является создание системы и способа обнаружения винтокрылых беспилотных летательных аппаратов с увеличенной точностью определения типа и параметров винтокрылого БПЛА и увеличенной информативностью данных о винтокрылом БПЛА за счет автоматического видеонаблюдения за винтокрылым БПЛА в дополнение к методам обнаружения БПЛА с помощью спектрального и временного анализа акустического сигнала.
Поставленная задача решена путем создания системы обнаружения беспилотных винтокрылых летательных аппаратов (БПЛА), содержащей по меньшей мере четыре акустических датчика с известным взаимным расположением и расположением относительно контролируемой зоны в пространстве, каждый из которых состоит из приемного устройства и блока обнаружения и классификации, причем выход приемного устройства соединен с входом блока обнаружения и классификации, который соединен с блоком оперативного управления и принятия решения, который соединен с системой оповещения и индикации, отличающейся тем, что блок оперативного управления и принятия решения также соединен с блоком сопряжения с телекамерами, который соединен по меньшей мере с одной поворотной телекамерой с известным местоположением в пространстве и скоростью поворота, при этом
приемное устройство выполнено с возможностью приема акустического сигнала и передачи его в
блок обнаружения и классификации, выполненный с возможностью предварительной обработки акустического сигнала, при этом классификации источника акустического сигнала в качестве винтокрылого БПЛА с помощью методов спектрального анализа акустического сигнала, с возможностью определения данных о перемещении источника акустического сигнала, а именно расстояния от акустического датчика до источника акустического сигнала и направления его движения, с помощью метода анализа мощности акустического сигнала во временной области, с возможностью принятия решения о наличии или отсутствии винтокрылого БПЛА в контролируемой зоне, и с возможностью передачи данных о перемещении источника акустического сигнала и решения о наличии винтокрылого БПЛА в контролируемой зоне в
блок оперативного управления и принятия решения, выполненный с возможностью уточнения данных о перемещении винтокрылого БПЛА, при этом определения высоты полета и горизонтальных координат БПЛА в каждую единицу времени и передачи их в систему оповещения и индикации, а также в
блок сопряжения с телекамерами, выполненный с возможностью вычисления PTZ-координат наведения поворотной телекамеры на основе данных о местоположении поворотной телекамеры, данных о скорости ее поворота и данных о перемещении винтокрылого БПЛА, а также с возможностью передачи PTZ-координат наведения в
поворотную телекамеру, выполненную с возможностью наведения на винтокрылый БПЛА по PTZ-координатам, с возможностью формирования изображения винтокрылого БПЛА и контролируемой зоны, а также с возможностью передачи изображения в
систему оповещения и индикации, выполненную с возможностью визуализации данных о перемещении винтокрылого БПЛА в виде его высоты полета и траектории полета на топографической карте, а также с возможностью визуализации изображения винтокрылого БПЛА и контролируемой зоны.
В предпочтительном варианте осуществления системы выход приемного устройства соединен с входом блока обнаружения и классификации по беспроводному каналу передачи данных.
В предпочтительном варианте осуществления системы акустические датчики выполнены с возможностью ретрансляции данных в блок обнаружения и классификации по беспроводному каналу передачи данных.
В предпочтительном варианте осуществления системы блок оперативного управления и принятия решения, выполненный с возможностью уточнения данных о перемещении винтокрылого БПЛА, при этом определения высоты полета и горизонтальных координат БПЛА в каждую единицу времени и на основе них вычисления скорости и направления перемещения винтокрылого БПЛА.
В предпочтительном варианте осуществления системы система оповещения и индикации расположена на рабочем месте оператора и выполнена в виде монитора.
В предпочтительном варианте осуществления системы система оповещения и индикации расположена на рабочем месте оператора и состоит из соединенных между собой монитора и акустической колонки, при этом блок оперативного управления и принятия решения выполнен с возможностью формирования звукового сигнала оповещения о наличии винтокрылого БПЛА в контролируемой зоне и передачи его в акустическую колонку, выполненную с возможностью трансляции звукового сигнала оповещения.
В предпочтительном варианте осуществления системы блок оперативного управления и принятия решения также соединен с блоком интеграции, выполненным с возможностью подключения к внешним устройствам, и передачи в них данных, и с блоком информации, выполненным с возможностью передачи в блок интеграции через блок оперативного управления и принятия решения данных об интерфейсе и протоколе связи с внешним устройством.
В предпочтительном варианте осуществления системы блок обнаружения и классификации состоит из блока формирования АЧХ (амплитудно-частотной характеристики), вход которого соединен с выходом приемного устройства, а выход - с входом блока анализа сигнала во временной области и с входом блока классификации источника, который соединен с памятью и выход которого соединен с входом блока принятия решения, при этом вход блока принятия решения также соединен с выходом блока анализа во временной области, причем
блок формирования АЧХ выполнен с возможностью формирования амплитудно-частотной характеристики акустического сигнала и передачи ее в блок анализа во временной области и в
блок классификации источника, выполненный с возможностью классификации источника акустического сигнала в качестве винтокрылого БПЛА с помощью методов спектрального анализа с использованием библиотеки шаблонов амплитудно-частотных характеристик акустических сигналов винтокрылых БПЛА, хранящейся в памяти, при этом формирования классификационных признаков винтокрылого БПЛА и передачи их в блок принятия решения, а
блок анализа во временной области выполнен с возможностью анализа мощности акустического сигнала во временной области, при этом определения данных о перемещении источника акустического сигнала, а именно расстояния от акустического датчика до источника акустического сигнала и направления его движения, и с возможностью передачи данных о перемещении источника акустического сигнала в
блок принятия решения, выполненный с возможностью принятия решения о наличии винтокрылого БПЛА в контролируемой зоне, при этом анализа данных о перемещении источника акустического сигнала и классификационных признаков винтокрылого БПЛА, а также с возможностью передачи данных о перемещении источника акустического сигнала и решения о наличии винтокрылого БПЛА в контролируемой зоне в блок оперативного управления и принятия решения.
Поставленная задача решена также путем создания способа обнаружения беспилотных винтокрылых летательных аппаратов (БПЛА), в котором
с помощью приемного устройства принимают акустический сигнал и передают его в
блок обнаружения и классификации, с помощью которого предварительно обрабатывают акустический сигнал, при этом классифицируют источник акустического сигнала в качестве винтокрылого БПЛА с помощью методов спектрального анализа акустического сигнала, определяют данные о перемещении источника акустического сигнала, а именно расстояние от акустического датчика до источника акустического сигнала и направление его движения, с помощью метода анализа мощности акустического сигнала во временной области, принимают решение о наличии или отсутствии винтокрылого БПЛА в контролируемой зоне и передают данные о перемещении источника акустического сигнала и решение о наличии винтокрылого БПЛА в контролируемой зоне в
блок оперативного управления и принятия решения, с помощью которого уточняют данные о перемещении винтокрылого БПЛА, при этом определяют высоту полета и горизонтальные координаты БПЛА в каждую единицу времени и передают их в систему оповещения и индикации, а также в
блок сопряжения с телекамерами, с помощью которого вычисляют PTZ-координаты наведения поворотной телекамеры на основе данных о местоположении поворотной телекамеры, данных о скорости ее поворота и данных о перемещении винтокрылого БПЛА, а также передают PTZ-координаты наведения в
поворотную телекамеру, которую наводят на винтокрылый БПЛА по PTZ-координатам, формируют изображение винтокрылого БПЛА и контролируемой зоны, а также передают изображение в
систему оповещения и индикации, с помощью которой визуализируют данные о перемещении винтокрылого БПЛА в виде его высоты полета и траектории полета на топографической карте, а также визуализируют изображение винтокрылого БПЛА и контролируемой зоны.
В предпочтительном варианте осуществления способа с помощью блока обнаружения и классификации передают данные в блок оперативного управления по беспроводному каналу передачи данных.
В предпочтительном варианте осуществления способа с помощью акустических датчиков ретранслируют данные в блок обнаружения и классификации по беспроводному каналу передачи данных.
В предпочтительном варианте осуществления способа с помощью блока оперативного управления и принятия решения уточняют данные о перемещении винтокрылого БПЛА, при этом определяют высоту полета и горизонтальные координаты БПЛА в каждую единицу времени и на основе них вычисляют скорость и направление перемещения винтокрылого БПЛА.
В предпочтительном варианте осуществления способа передают изображение в систему оповещения и индикации, которая расположена на рабочем месте оператора и выполнена в виде монитора.
В предпочтительном варианте осуществления способа передают изображение в систему оповещения и индикации, которая расположена на рабочем месте оператора и состоит из соединенных между собой монитора и акустической колонки, при этом с помощью блока оперативного управления и принятия решения формируют звуковой сигнал оповещения о наличии винтокрылого БПЛА в контролируемой зоне и передают его в акустическую колонку, с помощью которой транслируют звуковой сигнал оповещения.
В предпочтительном варианте осуществления способа с помощью блока интеграции подключают блок оперативного управления и принятия решения к внешним устройствам, и передают в них данные, и к блоку информации, с помощью которого передают в блок интеграции через блок оперативного управления и принятия решения данные об интерфейсе и протоколе связи с внешним устройством.
В предпочтительном варианте осуществления способа
с помощью блока формирования АЧХ формируют амплитудно-частотную характеристику акустического сигнала и передают ее в блок анализа во временной области и в
блок классификации источника, с помощью которого классифицируют источник акустического сигнала в качестве винтокрылого БПЛА с помощью методов спектрального анализа с использованием библиотеки шаблонов амплитудно-частотных характеристик акустических сигналов винтокрылых БПЛА, хранящейся в памяти, при этом формируют классификационные признаки винтокрылого БПЛА и передают их в блок принятия решения, а
с помощью блока анализа во временной области анализируют мощность акустического сигнала во временной области, при этом определяют данные о перемещении источника акустического сигнала, а именно расстояние от акустического датчика до источника акустического сигнала и направление его движения, и передают данные о перемещении источника акустического сигнала в
блок принятия решения, с помощью которого принимают решение о наличии винтокрылого БПЛА в контролируемой зоне, при этом анализируют данные о перемещении источника акустического сигнала и классификационные признаки винтокрылого БПЛА, а также передают данные о перемещении источника акустического сигнала и решение о наличии винтокрылого БПЛА в контролируемой зоне в блок оперативного управления и принятия решения.
Для лучшего понимания заявленного изобретения далее приводится его подробное описание с соответствующими графическими материалами.
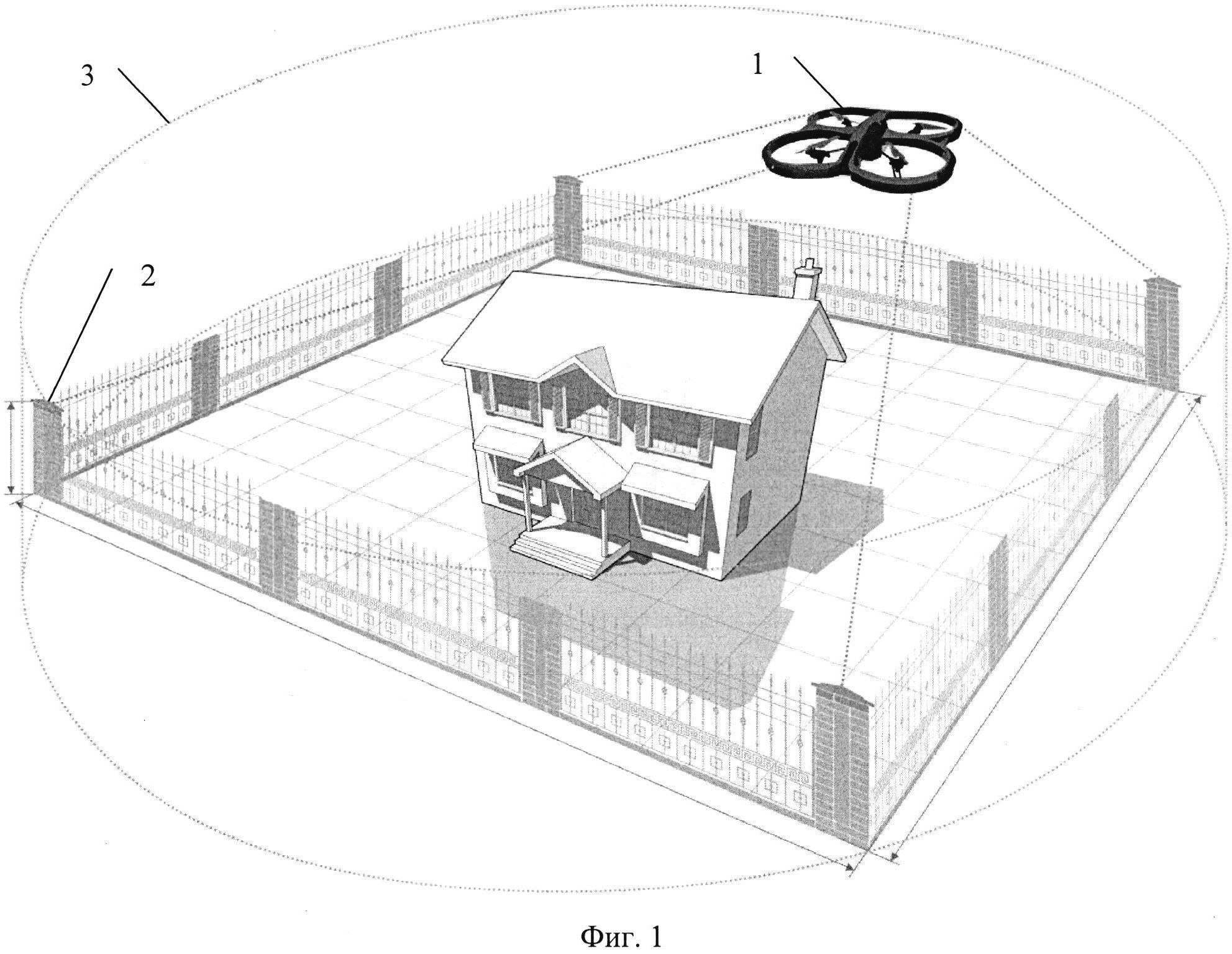
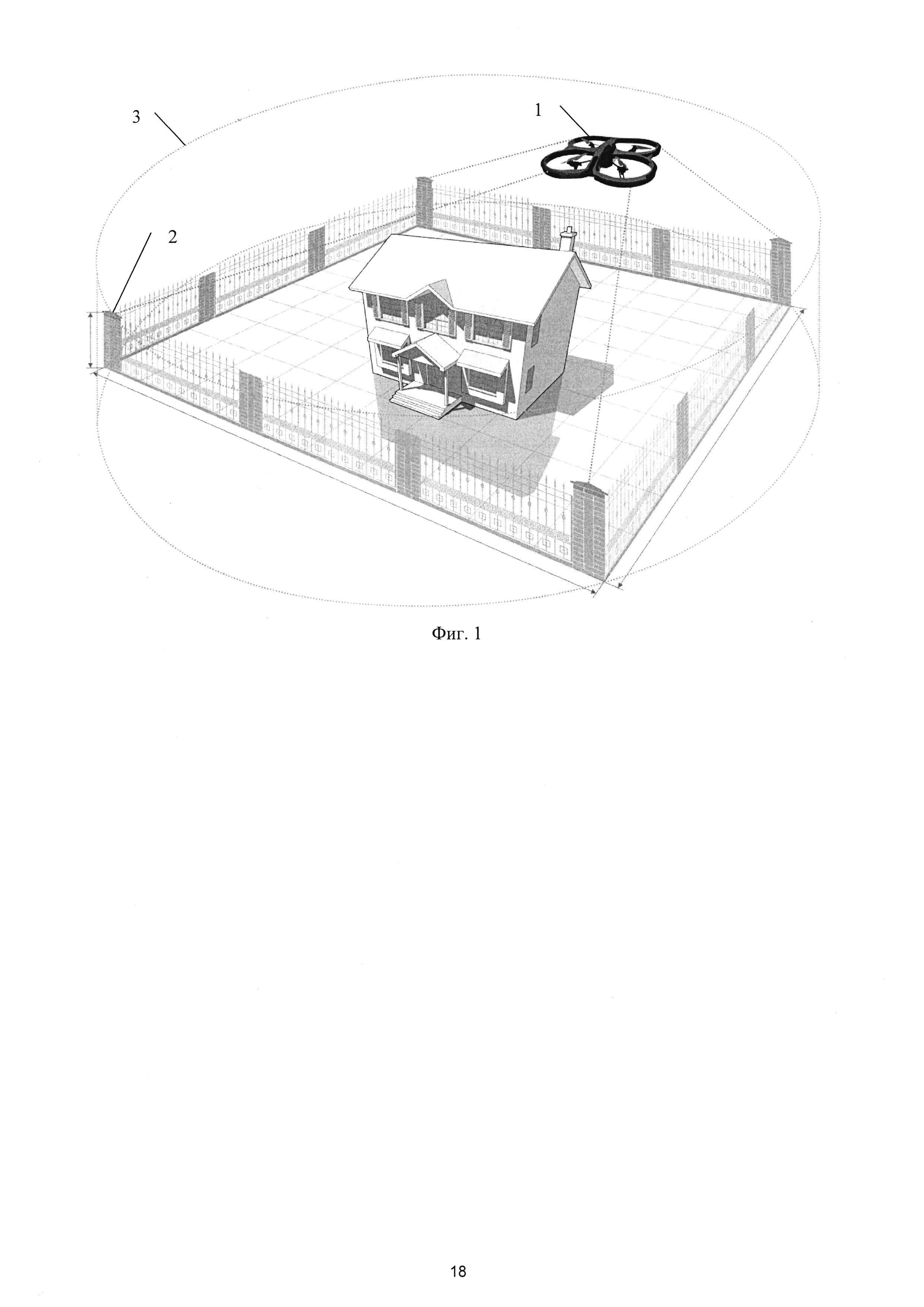
Фиг. 1. Схема расположения датчиков системы обнаружения винтокрылых беспилотных летательных аппаратов в контролируемой зоне, выполненная согласно изобретению.
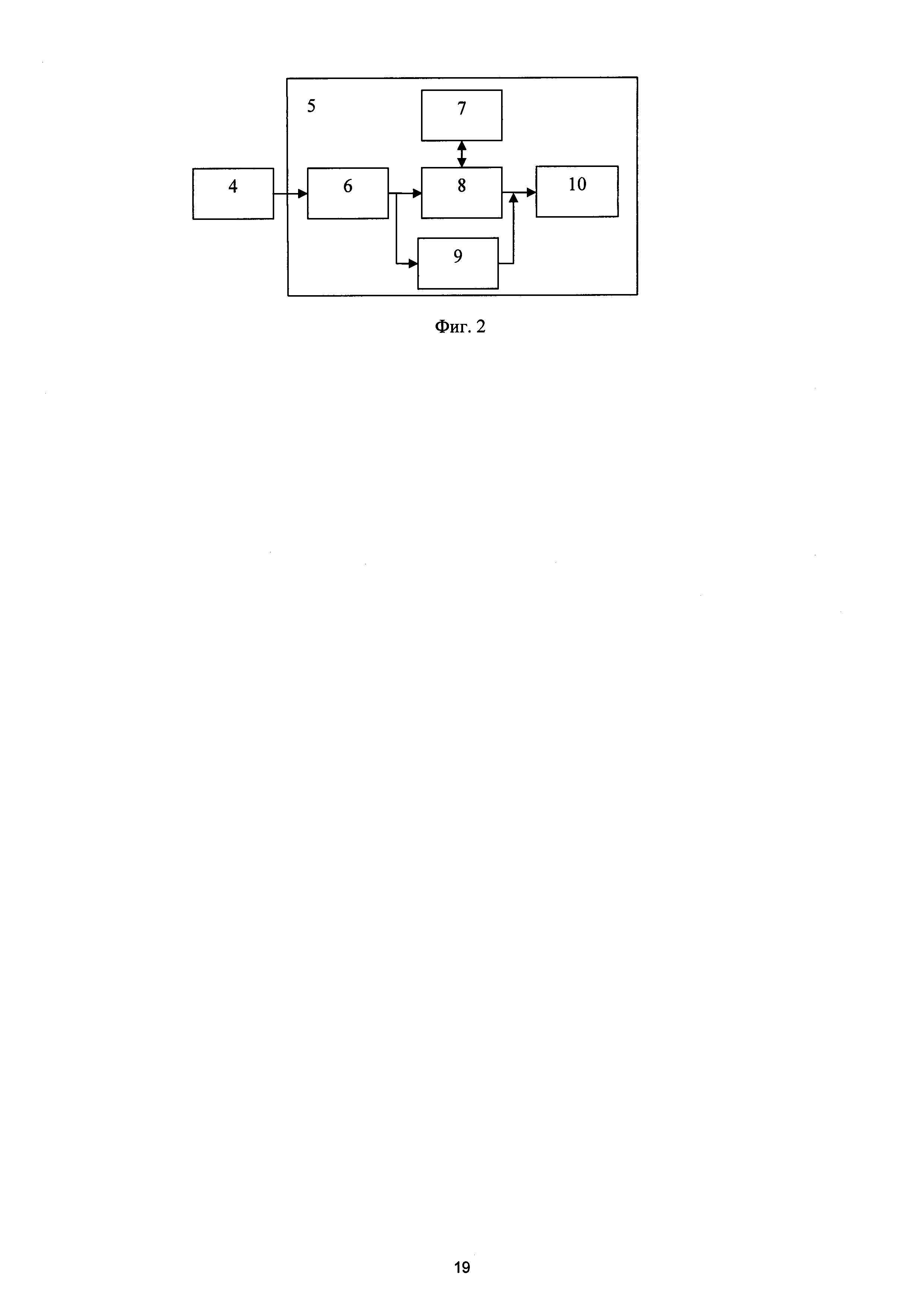
Фиг. 2. Функциональная схема акустического датчика системы обнаружения винтокрылых беспилотных летательных аппаратов, выполненная согласно изобретению.
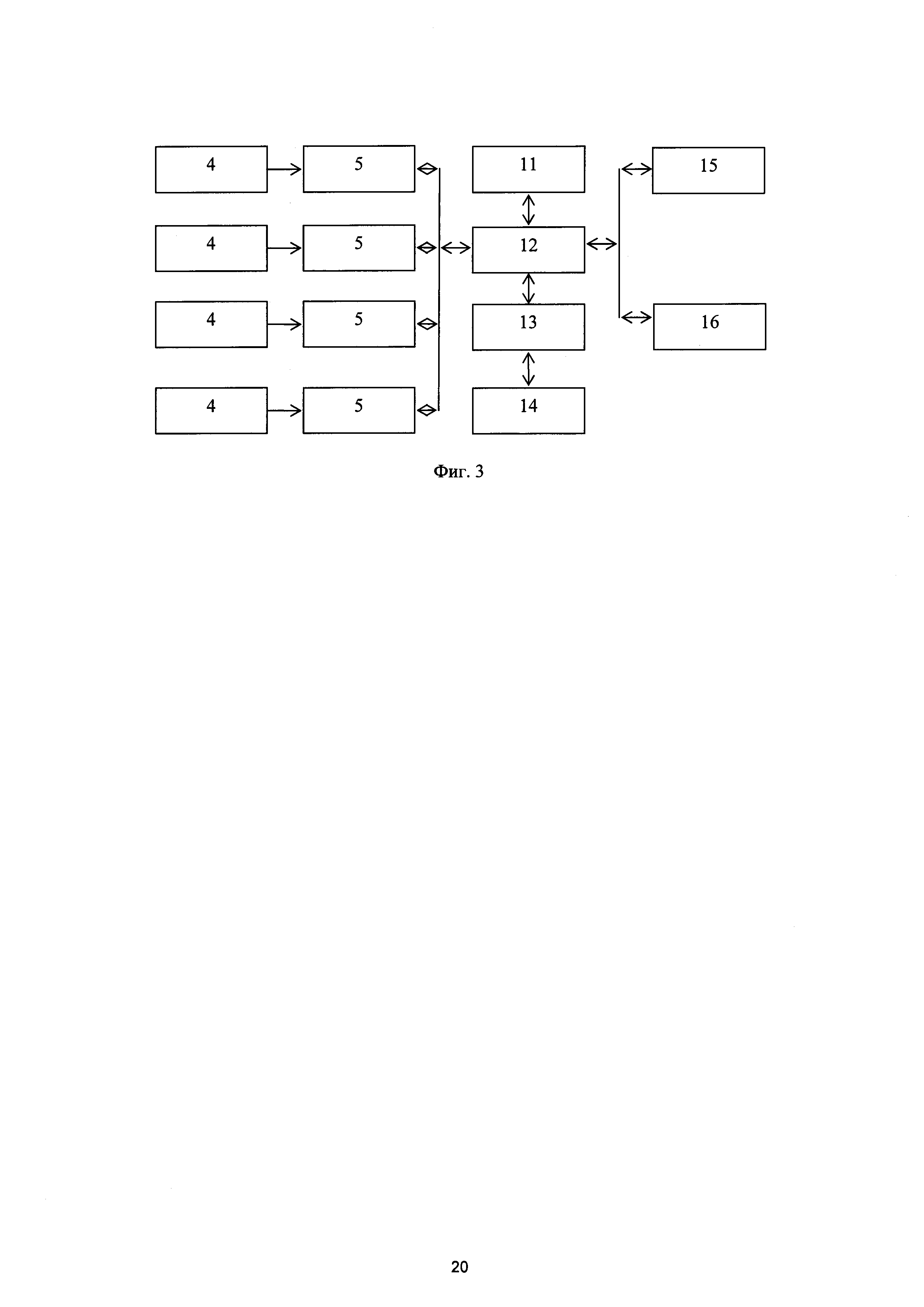
Фиг. 3. Функциональная схема системы обнаружения винтокрылых беспилотных летательных аппаратов, выполненная согласно изобретению.
Элементы:
1 - БПЛА (беспилотный летательный аппарат);
2 - акустический датчик;
3 - контролируемая зона;
4 - приемное устройство;
5 - блок обнаружения и классификации;
6 - блок формирования АЧХ (амплитудно-частотная характеристика);
7 - память;
8 - блок классификации источника;
9 - блок анализа во временной области;
10 - блок принятия решения;
11 - блок интеграции;
12 - блок оперативного управления и принятия решения;
13 - блок сопряжения с телекамерами;
14 - телекамера;
15 - система оповещения и индикации;
16 - блок информации.
Рассмотрим вариант выполнения заявленных системы и способа обнаружения винтокрылых беспилотных летательных аппаратов (Фиг. 1-3).
Система обнаружения беспилотных винтокрылых летательных аппаратов 1, содержит четыре акустических датчика 2 с известным взаимным расположением и расположением относительно контролируемой зоны 3 в пространстве. Каждый акустический датчик 2 состоит из приемного устройства 4 и блока 5 обнаружения и классификации. Выход приемного устройства 4 соединен с входом блока 5 обнаружения и классификации, который соединен с блоком 12 оперативного управления и принятия решения, который соединен с системой 15 оповещения и индикации. Блок 12 оперативного управления и принятия решения также соединен с блоком 13 сопряжения с телекамерами, который соединен с поворотной телекамерой 14 с известным местоположением в пространстве и скоростью поворота.
Выход приемного устройства 4 соединен с входом блока 5 обнаружения и классификации по беспроводному каналу передачи данных.
Система 15 оповещения и индикации расположена на рабочем месте оператора и выполнена в виде монитора.
Блок 12 оперативного управления и принятия решения также соединен с блоком 11 интеграции, выполненным с возможностью подключения к внешним устройствам и передачи в них данных, и с блоком 16 информации, выполненным с возможностью передачи в блок 11 интеграции через блок 12 оперативного управления и принятия решения данных об интерфейсе и протоколе связи с внешним устройством.
Блок 5 обнаружения и классификации состоит из блока 6 формирования АЧХ (амплитудно-частотной характеристики), вход которого соединен с выходом приемного устройства 4, а выход - с входом блока 9 анализа сигнала во временной области и с входом блока 8 классификации источника, который соединен с памятью 7 и выход которого соединен с входом блока 10 принятия решения. Вход блока 10 принятия решения также соединен с выходом блока 9 анализа во временной области.
Система обнаружения беспилотных винтокрылых летательных аппаратов функционирует следующим образом (Фиг. 1-3).
С помощью приемного устройства 4 принимают акустический сигнал и передают его в блок 5 обнаружения и классификации.
С помощью блока 5 обнаружения и классификации: предварительно обрабатывают акустический сигнал, при этом классифицируют источник акустического сигнала в качестве винтокрылого БПЛА 1 с помощью методов спектрального анализа акустического сигнала; определяют данные о перемещении источника акустического сигнала, а именно расстояние от акустического датчика до источника акустического сигнала и направление его движения, с помощью метода анализа мощности акустического сигнала во временной области; принимают решение о наличии или отсутствии винтокрылого БПЛА 1 в контролируемой зоне 3 и передают данные о перемещении источника акустического сигнала и решение о наличии винтокрылого БПЛА 1 в контролируемой зоне в блок 12 оперативного управления и принятия решения.
С помощью блока 12 оперативного управления и принятия решения уточняют данные о перемещении винтокрылого БПЛА 1, при этом определяют высоту полета и горизонтальные координаты БПЛА 1 в каждую единицу времени и передают их в систему 15 оповещения и индикации, а также в блок 13 сопряжения с телекамерами.
С помощью блока 13 сопряжения с телекамерами вычисляют PTZ-координаты наведения поворотной телекамеры 11 на основе данных о местоположении поворотной телекамеры 11, данных о скорости ее поворота и данных о перемещении винтокрылого БПЛА 1, а также передают PTZ-координаты наведения в поворотную телекамеру 11.
Поворотную телекамеру 11 наводят на винтокрылый БПЛА 1 по PTZ-координатам, формируют изображение винтокрылого БПЛА 1 и контролируемой зоны 3, а также передают изображение в систему 15 оповещения и индикации, которая расположена на рабочем месте оператора и выполнена в виде монитора.
С помощью системы 15 оповещения и индикации визуализируют данные о перемещении винтокрылого БПЛА 1 в виде его высоты полета и траектории полета на топографической карте, а также визуализируют изображение винтокрылого БПЛА 1 и контролируемой зоны 3.
С помощью блока 12 оперативного управления и принятия решения уточняют данные о перемещении винтокрылого БПЛА 1, при этом определяют высоту полета и горизонтальные координаты БПЛА 1 в каждую единицу времени и на основе них вычисляют скорость и направление перемещения винтокрылого БПЛА 1.
С помощью блока 11 интеграции подключают блок 12 оперативного управления и принятия решения к внешним устройствам, и передают в них данные, и к блоку 16 информации, с помощью которого передают в блок интеграции 11 через блок 12 оперативного управления и принятия решения данные об интерфейсе и протоколе связи с внешним устройством.
С помощью блока 6 формирования АЧХ формируют амплитудно-частотную характеристику акустического сигнала и передают ее в блок 9 анализа во временной области и в блок 8 классификации источника.
С помощью блока 8 классификации источника классифицируют источник акустического сигнала в качестве винтокрылого БПЛА 1 с помощью методов спектрального анализа с использованием библиотеки шаблонов амплитудно-частотных характеристик акустических сигналов винтокрылых БПЛА, хранящейся в памяти, при этом формируют классификационные признаки винтокрылого БПЛА 1 и передают их в блок 10 принятия решения.
С помощью 9 блока анализа во временной области анализируют мощность акустического сигнала во временной области, при этом определяют данные о перемещении источника акустического сигнала, а именно расстояние от акустического датчика до источника акустического сигнала и направление его движения, и передают данные о перемещении источника акустического сигнала в блок 10 принятия решения.
С помощью блока 10 принятия решения принимают решение о наличии винтокрылого БПЛА 1 в контролируемой зоне 3, при этом анализируют данные о перемещении источника акустического сигнала и классификационные признаки винтокрылого БПЛА, а также передают данные о перемещении источника акустического сигнала и решение о наличии винтокрылого БПЛА в контролируемой зоне в блок 12 оперативного управления и принятия решения.
Заявленное изобретение предназначено для обнаружения винтокрылых беспилотных летательных аппаратов с целью предотвращения несанкционированного доступа в воздушное пространство контролируемой зоны 3 пространства и отслеживания перемещения винтокрылых БПЛА 1 в контролируемой зоне 3. Применение заявленного изобретения позволяет выполнять классификацию источников акустического сигнала на основе информации от одного или нескольких акустических датчиков 2, определять местоположение источника акустического сигнала на основе информации по меньшей мере от четырех акустических датчиков 2 и производить его аутентификацию. Централизованное принятие решения позволяет вырабатывать комплексное решение по направлению перемещения винтокрылого БПЛА 1 в контролируемой зоне 3, и при необходимости формировать сообщение любого типа (оповещение о параметрах перемещения, тревога и другие) о наличии винтокрылого БПЛА 1 в контролируемой зоне 3 с указанием его параметров перемещения.
В заявленных системе и способе обнаружения винтокрылых БПЛА 1 одновременно применяют методы спектрального и временного анализа. Заявленные система и способ позволяют повысить надежность обнаружения винтокрылых БПЛА 1 и их аутентификации с помощью по меньшей мере одной телекамеры 14, автоматически направляемой на винтокрылый БПЛА 1 после его обнаружения с помощью методов спектрального и временного анализа.
Хотя описанный выше вариант выполнения изобретения был изложен с целью иллюстрации настоящего изобретения, специалистам ясно, что возможны разные модификации, добавления и замены, не выходящие из объема и смысла настоящего изобретения, раскрытого в прилагаемой формуле изобретения.
Устройство и способ каскадной обработки потока изображений с помощью свёрточных нейронных сетей
Видеокамера для получения и обработки видеоданных в формате 4k с обзором 360x360 градусов и способ ее функционирования
Способ настройки видеокамеры для более качественного распознавания государственных регистрационных знаков в системах фиксации нарушений правил дорожного движения
Система фиксации нарушения правил парковки
Способ определения траектории движения автомобиля по видео для выявления нарушений правил дорожного движения
Система определения скорости транспортного средства на участке
Система контроля и мониторинга автотранспортных средств
Телекамера и способ для формирования панорамного видеоизображения и распознавания объектов на нем
Симметричный мультиплексор на комплементарных металл-окисел-полупроводник (кмоп) транзисторах
Векторный мультиформатный умножитель
Радиационно-стойкий элемент памяти для статических оперативных запоминающих устройств на комплементарных металл-окисел-полупроводник транзисторах
Система поиска нарушений в порядке расположения объектов
Система и способ предотвращения нарушений правил полетов беспилотными летательными аппаратами
Унифицированная реконфигурируемая схема коммутации быстрого преобразования фурье и способ её формирования
Устройство коммуникационного интерфейса gigaspacewire
Параллельный реконфигурируемый кодер рида-соломона
Источник опорного напряжения с калибровкой выходного напряжения

