Результат интеллектуальной деятельности: СЕЛЬСКОХОЗЯЙСТВЕННОЕ ПЕРЕВОЗОЧНОЕ ТРАНСПОРТНОЕ СРЕДСТВО И КОМПЛЕКС ТРАНСПОРТНЫХ СРЕДСТВ
Вид РИД
Изобретение
Область техники, к которой относится изобретение
Изобретение относится к сельскохозяйственному перевозочному транспортному средству для приема материала, в особенности убранной массы, от первичного транспортного средства, в особенности самоходной уборочной машины, такой как полевой измельчитель или зерноуборочный комбайн, а также к комплексу нескольких скоординированных друг с другом транспортных средств.
Уровень техники
Такое перевозочное транспортное средство или комплекс транспортных средств известны из патентного документа WO 00/35265 А1. Первичным транспортным средством обычного комплекса является один или несколько зерноуборочных комбайнов, которые убирают поле и передают убранную массу на перевозочное транспортное средство. Перевозочным транспортным средством является трактор с прицепом. Когда прицеп заполнен, трактор ищет припаркованный на краю поля грузовой автомобиль, чтобы перегрузить на него убранную массу.
Для перегрузки комбайны оснащены разгрузочной трубой, которая перегружает убранную массу в прицеп плотной струей. Когда трактор и прицеп движутся рядом с комбайном с точно такой же скоростью, положение разгрузочной трубы относительно прицепа не изменяется, и убранная масса образует на прицепе насыпной конус. Когда он достигает загрузочной кромки прицепа, перегрузка в прицеп должна быть прервана, иначе образуются потери убранной массы. Затем трактор должен сначала отыскать на краю поля транспортное средство, чтобы выгрузиться в него, до того как может возобновиться перегрузка из комбайна. В результате перевозочное транспортное средство проделывает по полю ненужный длинный обратный путь, что, с одной стороны, приводит к нежелательному уплотнению почвы, и с другой стороны, наносит значительный ущерб экономике процесса уборки, так как перевозочное транспортное средство без необходимости потребляет топливо, а число комбайнов, которое оно может одновременно обслуживать, остается низким.
Раскрытие изобретения
Задачей изобретения является создание перевозочного транспортного средства или комплекса транспортных средств с устранением указанных недостатков.
С одной стороны, решение поставленной задачи достигается за счет сельскохозяйственного перевозочного транспортного средства для приема материала, в особенности убранной массы, от движущегося первичного транспортного средства в ходе движения в соседстве с первичным транспортным средством, содержащего транспортный контейнер с верхней загрузкой для приема материала, по меньшей мере, один датчик для определения распределения материала в транспортном контейнере и устройство управления для изменения положения перевозочного транспортного средства относительно движущегося первичного транспортного средства на основе установленного распределения материала.
За счет того, что датчик поставляет устройству управления информацию об областях транспортного контейнера, загруженных с различной интенсивностью, устройство управления может в любой момент времени отрегулировать положение перевозочного транспортного средства относительно первичного транспортного средства таким образом, что материал из первичного транспортного средства перегружается в относительно мало загруженную область перевозочного транспортного средства. Когда таким путем уровень заполнения материала в транспортном контейнере становится относительно ровным, приемная способность транспортного контейнера используется полностью, и число проездов перевозочного транспортного средства сводится к минимуму.
Устройство управления должно быть выполнено способным оценивать скорость движения первичного транспортного средства; для того, чтобы изменять положение, далее оно может временно устанавливать скорость движения перевозочного транспортного средства с отклонением от оцененной скорости движения.
В качестве датчика для определения распределения материала предпочтительно используется телевизионная камера. Преимущество камеры перед датчиками других типов состоит в том, что она не только способна воспринимать уровень заполнения материалом различных мест транспортного контейнера, но также позволяет определять положение перегрузочного потока от первичного транспортного средства, например, струи от разгрузочной трубы, и одновременно предоставляет возможность оценки положения перевозочного транспортного средства относительно первичного транспортного средства.
Особенно в том случае, когда перевозочное транспортное средство представляет собой поезд из тягача и прицепного к тягачу прицепа, камера должна быть стационарной принадлежностью транспортного контейнера, чтобы обеспечивать возможность ее правильной установки и способности оптического обзора верхней поверхности материала в транспортном контейнере и вследствие этого предоставлять необходимые данные для определения уровня заполнения.
Камера может быть предусмотрена также для восприятия почвы, по которой следует перевозочное транспортное средство и/или для восприятия первичного транспортного средства. Восприятие первичного транспортного средства особенно рационально во время приближения перевозочного транспортного средства к первичному транспортному средству для подготовки к перегрузке. Это важно, например, для того, чтобы устройство управления на основе данной информации могло автоматически управлять приближением к первичному транспортному средству без вмешательства водителя или только для того, чтобы предупреждать водителя перевозочного транспортного средства об опасной близости к первичному транспортному средству.
Для восприятия уровня заполнения транспортного контейнера и для восприятия почвы и/или первичного транспортного средства может использоваться одна и та же камера. За счет использования одной камеры в разное время для разных задач могут быть снижены до минимума затраты на перевозочное транспортное средство.
Далее, перевозочное транспортное средство должно быть оснащено присоединенным к транспортному контейнеру выпускным устройством для перегрузки материала во внешний контейнер, например, в грузовое пространство следующего транспортного средства.
Предпочтительно камера предусмотрена также для восприятия внешнего контейнера в ходе перегрузки.
Предпочтительно при этом речь идет о той же камере, которая может использоваться также для восприятия первичного транспортного средства или уровня заполнения транспортного контейнера.
Далее, устройство управления может быть выполнено с возможностью наблюдения за уровнем заполнения внешнего контейнера и позиционирования выпускного устройства относительно внешнего контейнера в зависимости от уровня его заполнения или от хода перегрузки. При этом могут быть сэкономлены затраты на соответствующую систему управления на внешнем контейнере и тем не менее может обеспечиваться равномерная полная загрузка внешнего контейнера.
Предпочтительно составной частью устройства управления перевозочного транспортного средства по изобретению является система планирования маршрутов для автоматического планирования маршрутов перевозочного транспортного средства между, по меньшей мере, одним подлежащим разгрузке первичным транспортным средством и пунктом разгрузки, таким как внешний контейнер.
Предпочтительно эта система планирования маршрутов выполнена с возможностью принимать от первичного транспортного средства в режиме реального времени, по меньшей мере, данные, относящиеся к состоянию загрузки и положению первичного транспортного средства, и на основе этих данных назначать пункт встречи сельскохозяйственного перевозочного транспортного средства с первичным транспортным средством. Благодаря этому могут устраняться ненужные длинные проезды перевозочного транспортного средства при своевременной разгрузке первичного транспортного средства для обеспечения экономичной эксплуатации с малыми перерывами.
Для упрощения координации перевозочного транспортного средства с первичным транспортным средством система планирования маршрутов может быть выполнена с возможностью также назначать маршрут первичного транспортного средства и передавать ему этот маршрут.
Далее, устройство управления может быть выполнено с возможностью автономной навигации перевозочного транспортного средства вдоль маршрута, запланированного системой планирования маршрутов.
Решение поставленной задачи достигается также за счет сельскохозяйственного комплекса транспортных средств, содержащего описанное выше перевозочное транспортное средство и, по меньшей мере, одно первичное транспортное средство. Предпочтительно первичное транспортное средство представляет собой зерноуборочный комбайн или другое уборочное транспортное средство, оснащенное бункером для сбора убранной массы. Поскольку такое первичное транспортное средство не должно постоянно сопровождаться перевозочным транспортным средством для забора убранной массы, одно перевозочное транспортное средство может обслуживать несколько первичных транспортных средств.
Краткий перечень фигур чертежей
Другие особенности и преимущества изобретения будут ясны из последующего описания примеров осуществления со ссылками на прилагаемые чертежи. На чертежах:
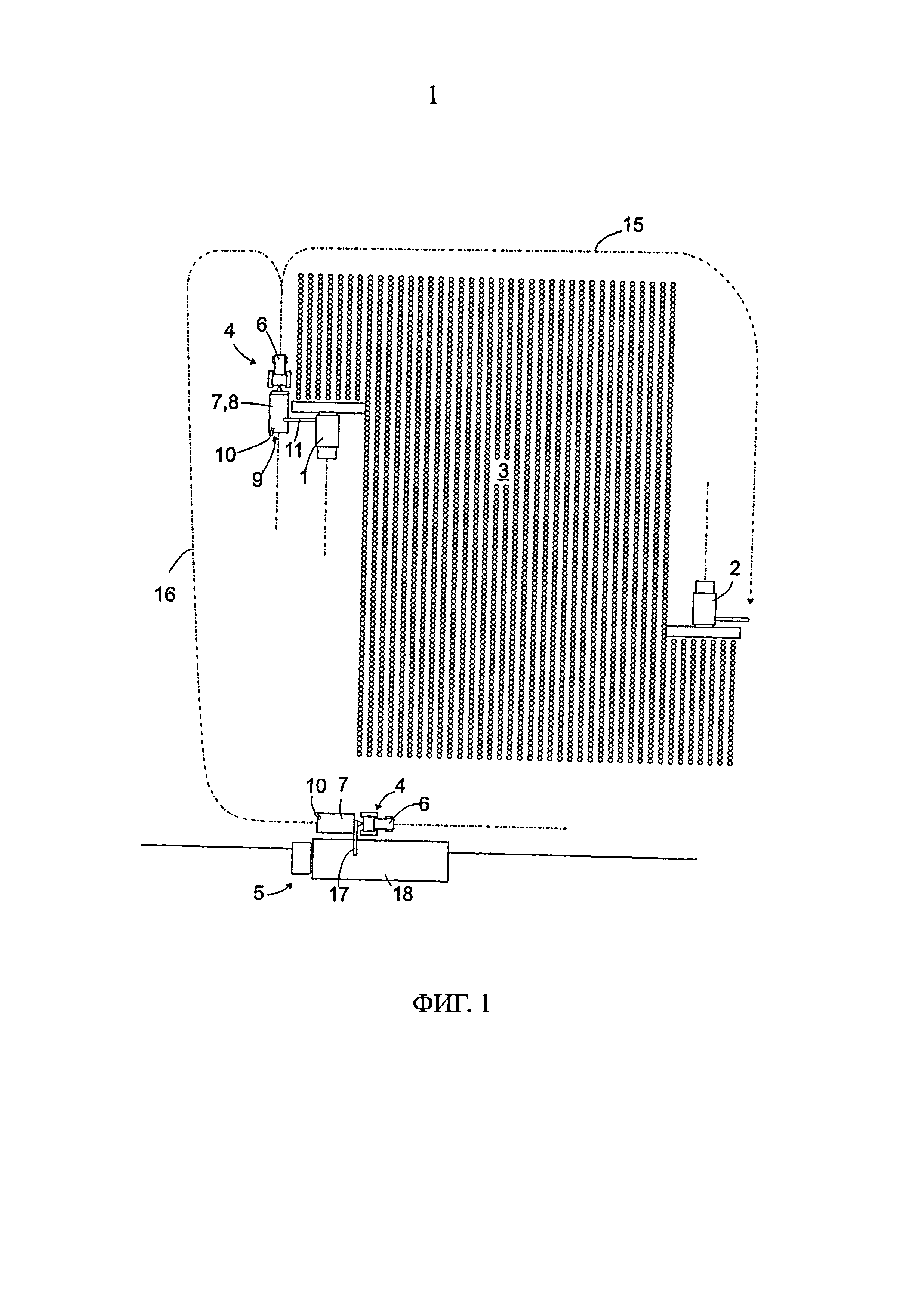
фиг.1 изображает комплекс транспортных средств в процессе эксплуатации и
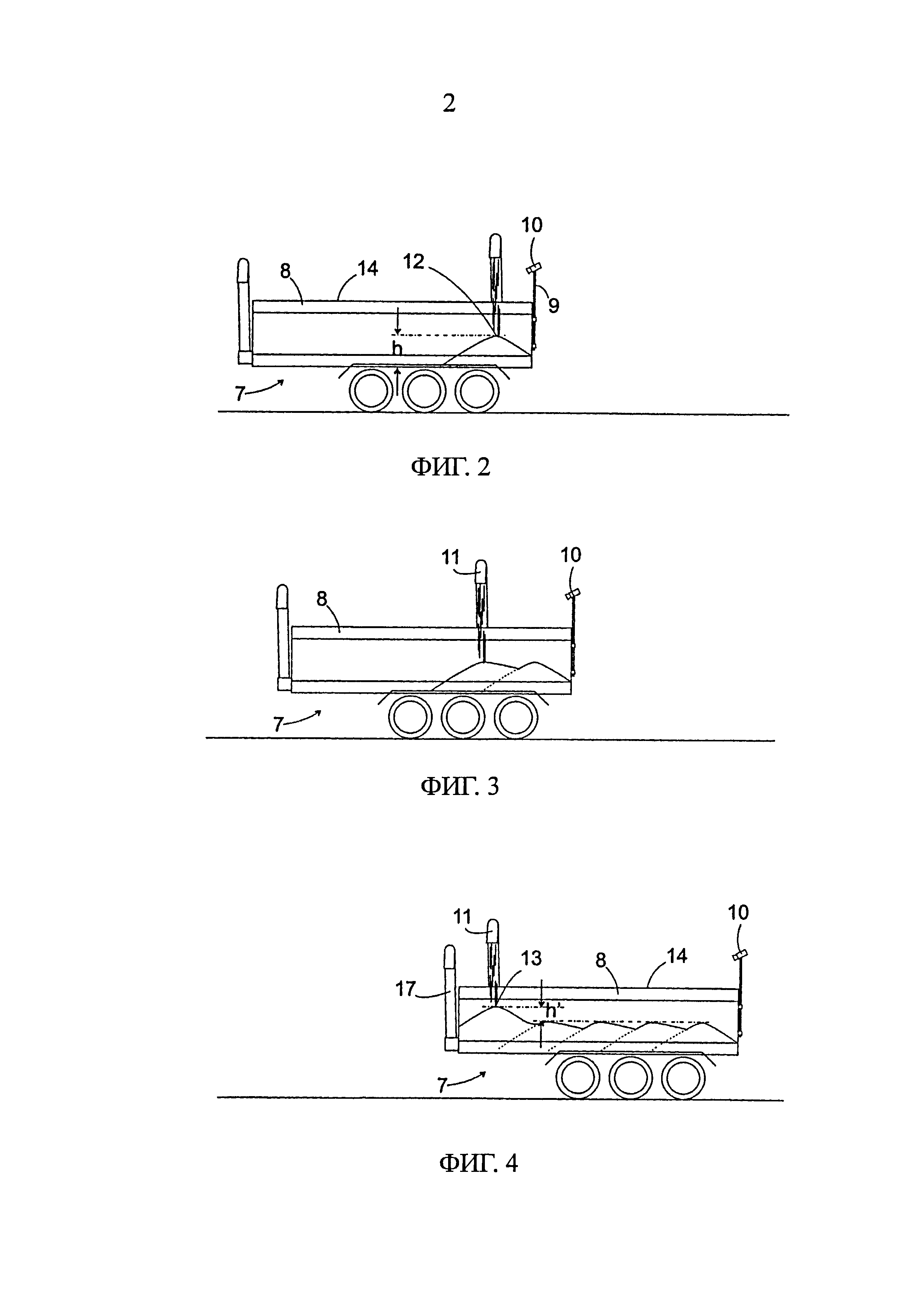
фиг.2-4 изображают этапы перегрузки из зерноуборочного комбайна на перевозочное транспортное средство.
Осуществление изобретения
На фиг.1 показана типовая ситуация эксплуатации комплекса транспортных средств по изобретению. Здесь комплекс включает два зерноуборочных комбайна 1, 2, которые одновременно убирают посевную площадь 3 на поле, дорожное транспортное средство 5 и полевое перевозочное транспортное средство 4. При показанной на фиг.1 эксплуатации полевое перевозочное транспортное средство циркулирует между комбайнами 1, 2 и дорожным транспортным средством 5, чтобы забирать зерно от комбайнов 1, 2, когда их зерновые бункеры достигли критического уровня заполнения, и транспортировать его к дорожному транспортному средству 5. При другом способе эксплуатации можно обойтись без дорожного транспортного средства 5, а вместо него полевое перевозочное транспортное средство 4 может транспортировать зерно непосредственно, то есть по дороге, к стационарному хранилищу.
Бортовой компьютер полевого перевозочного транспортного средства 4, который в дальнейшем будет для краткости обозначаться как перевозочное транспортное средство 4, известным образом связан с радиопередатчиком/приемником для приема спутниковых сигналов, в особенности сигналов GPS (Global Positioning System - глобальная система навигации и определения положения), и на основе этих сигналов точного определения положения перевозочного транспортного средства 4. Далее радиопередатчик/приемник служит для радиосвязи с комбайнами 1, 2, которые оснащены соответствующими приемопередатчиками и в состоянии определять собственное положение и сообщать его на компьютер перевозочного транспортного средства 4.
На основе картографических данных подлежащего обработке поля бортовой компьютер перевозочного транспортного средства 4 планирует маршруты, которые комбайны 1, 2 должны пройти при уборке поля, и передает их по радио на комбайны 1, 2. Комбайны 1, 2 могут проходить по этим маршрутам автономно и полностью автоматически, или же определенный для каждого из комбайнов 1, 2 маршрут может отображаться для водителя этого комбайна. В этом случае на водителя возлагается ответственность точно следовать по этому маршруту, при необходимости с учетом непредвиденных событий, не учтенных при планировании маршрута.
На основе сообщений обратной связи от комбайнов 1, 2 об уровне заполнения их зерновых бункеров бортовой компьютер в состоянии оценивать момент времени, когда каждый из комбайнов должен быть разгружен, чтобы не нужно было прерывать работу из-за переполнения зерновых бункеров, а также место проложенного маршрута, где они будут находиться к этому моменту времени. Заблаговременно до этого бортовой компьютер посылает перевозочное транспортное средство 4 в направлении рассчитанной точки встречи или выдает вызов на это водителю перевозочного транспортного средства 4.
В рассматриваемом случае перевозочным транспортным средством 4 является трактор 6 со схематично показанным на фиг.2-4 прицепом 7, который несет примерно прямоугольный открытый сверху транспортный контейнер 8. На задней стенке транспортного контейнера 8 установлена стойка 9, на вершине которой установлена камера 10, связанная с бортовым компьютером. Под управлением бортового компьютера камера 10 может поворачиваться на стойке 9 с двумя степенями свободы, чтобы пеленговать объекты в различных направлениях и на различных удалениях.
При приближении к запланированной точке встречи, например, с комбайном 1, бортовой компьютер сначала направляет камеру 10 на комбайн 1, чтобы оценить положение перевозочного транспортного средства 4 относительно комбайна 1 и подвести транспортный контейнер 8 в положение под выпускным потоком разгрузочной трубы 11 комбайна 1. Во время приближения к комбайну 1 бортовой компьютер на основании изменения по времени оценивает положение перевозочного транспортного средства 4 относительно комбайна 1 и скорость движения перевозочного транспортного средства 4 по сравнению со скоростью движения комбайна 1. Как только достигнуто подходящее для перегрузки целевое положение прицепа 7 под разгрузочной трубой 11, бортовой компьютер выравнивает скорость движения перевозочного транспортного средства 4 с комбайном 1.
Теперь камера 10 направляется на поверхность загрузки прицепа 7, при этом свободный конец разгрузочной трубы 11 также находится в поле обзора. Таким образом, на основе положения и размера разгрузочной трубы 11 в изображениях, получаемых от камеры 10, бортовой компьютер в любой момент может распознавать и при необходимости корректировать относительное положение перевозочного транспортного средства 4 и комбайна 1.
Далее, по полученным от камеры 10 изображениям бортовой компьютер оценивает распределение зерна в прицепе 7. Так например, как это показано на фиг.2, когда на основании изображений камеры определяется, что вершина насыпного конуса 12 под выпуском разгрузочной трубы 11 лежит на критической величине выше уровня заполнения зерна в других областях транспортного контейнера 8, бортовой компьютер временно устанавливает скорость движения перевозочного транспортного средства 4 с небольшой величиной отклонения от скорости движения комбайна 1, чтобы переместить выпуск разгрузочной трубы в продольном направлении прицепа 7. Например, как это показано на фиг.2, когда загрузка прицепа 7 начинается от заднего конца, при достижении критической высоты h насыпного конуса 12 бортовой компьютер временно замедляет перевозочное транспортное средство 4, так что оно отстает от комбайна 1 и загружается в области, расположенной ближе к переднему концу транспортного контейнера 8, как это показано на фиг.3.
Критическая высота h может соответствовать загрузочной кромке 14 транспортного контейнера 8, то есть транспортный контейнер 8 перемещается относительно комбайна 1 тогда, когда насыпной конус достигает загрузочной кромки 14, и сползающее зерно может выпадать из транспортного контейнера 8 через загрузочную кромку 14.
В зависимости от длины транспортного контейнера 8 этот процесс изменения положения транспортного контейнера 8 относительно комбайна 1 может повторяться с различной частотой, пока разгрузочная труба 11 не достигнет переднего конца транспортного контейнера 8, и прицеп 7 не будет равномерно загружен по всей длине.
Когда критическая высота h лежит ниже загрузочной кромки 14, разгрузочная труба 11 засыпает передний конец транспортного контейнера 8, как это показано на фиг.4, до тех пор, пока высота насыпного конуса 13 не превысит уровень заполнения в задней области транспортного контейнера 8 на критическую величину h'. Эта критическая высота h' может быть меньше критической высоты h, которая в случае по фиг.2 вызвала изменение положения перевозочного транспортного средства 4 относительно комбайна 1; целесообразно устанавливать ее тем меньше, чем ближе средний уровень заполнения транспортного контейнера подходит к загрузочной кромке 14. Теперь перевозочное транспортное средство 4 временно движется быстрее, чем комбайн 1, чтобы пошаговым образом заполнить транспортный контейнер 8 от переднего конца назад по всей его длине до высоты насыпного конуса 13. Таким образом, разгрузочная труба 11 перемещается над прицепом 7 в его продольном направлении, при необходимости несколько раз возвратно-поступательно, пока зерновой бункер комбайна 1 не будет опорожнен.
Когда приемная способность прицепа 7 достаточна для того, чтобы принять содержимое другого зернового бункера, бортовой компьютер планирует для перевозочного транспортного средства 4 маршрут 15 (см. фиг.1), на котором он может отыскать еще один комбайн 2, чтобы разгрузить его. В ином случае перевозочное транспортное средство следует по маршруту 16 к дорожному транспортному средству 5, чтобы перегрузить на него все зерно.
Когда перевозочное транспортное средство 4 доходит до дорожного транспортного средства 5, камера 10 направляется на него, чтобы определить положение и протяженность грузового пространства 18 дорожного транспортного средства 5. Во время перегрузки на дорожное транспортное средство 5 бортовой компьютер с учетом длины грузового пространства 18 и количества зерна, накопленного на прицепе 7, управляет пошаговым или непрерывным продвижением перевозочного транспортного средства 4 вдоль грузового пространства 18 таким образом, что когда разгрузочная труба 17 перевозочного транспортного средства 4 достигает конца грузового пространства 18, прицеп 7 оказывается опорожненным. При этом обеспечивается равномерное распределение зерна в грузовом пространстве 18 и тем самым хорошее использование грузовой вместимости дорожного транспортного средства 5 без необходимости его оснащения собственными средствами для определения распределения груза и для управления процессом перегрузки.
Альтернативная стратегия перегрузки в грузовое пространство 18 базируется на наблюдении посредством камеры 10. Обычно камера не может видеть дна грузового пространства 18, однако она может видеть зерно, когда уровень заполнения в грузовом пространстве 18 приближается к верхней кромке. Соответственно, в начале перегрузки устройство управления помещает разгрузочную трубу 17 на одном конце грузового пространства 18, или, в том случае, когда уровень заполнения на этом конце уже достиг максимальной допустимой высоты, оно ищет, начиная от этого конца, ту область грузового пространства 18, которая еще способна принимать груз. Когда способная к приему область найдена, она загружается до достижения максимальной допустимой высоты, а затем перевозочное транспортное средство 4 перемещается дальше, пока снова не дойдет до способной к приему области. Таким образом, грузовое пространство 18 может быть равномерно заполнено в ходе одного или нескольких процессов перегрузки.
Перечень условных обозначений на чертежах
1 Зерноуборочный комбайн
2 Зерноуборочный комбайн
3 Посевная площадь
4 Полевое перевозочное транспортное средство
5 Дорожное транспортное средство
6 Трактор
7 Прицеп
8 Транспортный контейнер
9 Стойка
10 Камера
11 Разгрузочная труба
12 Насыпной конус
13 Насыпной конус
14 Загрузочная кромка
15 Маршрут
16 Маршрут
17 Разгрузочная труба
18 Грузовое пространство.
Выполненная в виде ременной передачи система привода самоходного зерноуборочного комбайна
Сельскохозяйственная рабочая машина с устройством отображения
Транспортное средство с множеством программ управления колесами
Комплекс машин для уборки урожая, содержащий сельскохозяйственную уборочную машину и транспортное средство, и способ регулирования скорости такого комплекса
Самоходная сельскохозяйственная уборочная машина
Устройство для определения механического состояния вращаемого вокруг оси компонента машины и сельскохозяйственная рабочая машина, содержащая такое устройство
Сельскохозяйственная рабочая машина
Расширитель контейнера для сыпучих материалов
Управляемый гусеничный ходовой механизм
Металлодетектор
Сельскохозяйственная уборочная машина, в частности полевой измельчитель
Вспомогательная система для оптимизации работы самоходной сельскохозяйственной рабочей машины
Сельскохозяйственная рабочая машина
Способ планирования последующей обработки при осуществлении сельскохозяйственных работ
Способ и система маршрутизации для систем сельхозмашин
Способ управления системой сельхозмашин и автоматическая система управления
Устройство для определения маршрута транспортного средства

