Результат интеллектуальной деятельности: ЛЕТАТЕЛЬНЫЙ АППАРАТ, ВЫПОЛНЕННЫЙ С ВОЗМОЖНОСТЬЮ ВИСЕНИЯ, СПОСОБ СОДЕЙСТВИЯ МАНЕВРИРОВАНИЮ ЛЕТАТЕЛЬНОГО АППАРАТА И ИНТЕРФЕЙС
Вид РИД
Изобретение
Настоящее изобретение относится к летательному аппарату, выполненному с возможностью висения, т.е. поддерживающему полет на постоянной высоте по существу с нулевой скоростью, а в частности к вертолету или конвертоплану.
Настоящее изобретение также относится к способу для содействия маневрированию летательного аппарата, например для содействия маневрированию во время взлета, посадки или при спасательных операциях, т.е. когда летательный аппарат фактически зависает по существу с нулевой скоростью в плоскости, перпендикулярной направлениям вверх и вниз.
Настоящее изобретение также относится к графическому интерфейсу.
Летательный аппарат с возможностью висения обычно задействуют при маневрировании близко к фиксированным и/или перемещающимся препятствиям, как, например, когда происходит взлет и/или посадка на корабль, или при спасательных или восстановительных операциях в чрезвычайных ситуациях, и/или в расположениях с плохим доступом, как, например, в горных или морских спасательных операциях.
В таких случаях оператор визуально контролирует, что летательный аппарат остается на заданном расстоянии от препятствия.
Если летательный аппарат приближается к препятствию, таким образом, рискуя столкнуться лопастями одного из винтов с препятствием, оператор предупреждает пилота, который соответственно отводит летательный аппарат назад.
В индустрии существует потребность в мерах безопасности по предотвращению столкновения между летательным аппаратом и препятствием, вызываемой ошибками в принятии решений со стороны оператора и/или ошибками связи между оператором и пилотом.
US-A-5371581 раскрывает летательный аппарат, обеспеченный датчиком, который имеет псевдогоризонтальную область охвата и предназначен для получения значений расстояний между точками препятствия в пределах области охвата и точкой на летательном аппарате. В деталях, датчик содержит вращающуюся оптическую систему, которая выступает из нижнего участка фюзеляжа.
DE-A-102006053354 раскрывает вертолет с радарными детекторами, которые распределены по фюзеляжу летательного аппарата.
Целью настоящего изобретения является предоставление летательного аппарата, предназначенного для соответствия этим требованиям простым и низкозатратным образом.
Согласно настоящему изобретению предоставлен летательный аппарат, выполненный с возможностью висения, по п.1 формулы изобретения.
Настоящее изобретение также относится к графическому интерфейсу, содержащему средство отображения для отображения нескольких указаний по п. 12 формулы изобретения.
Настоящее изобретение также относится к способу содействия маневрирования летательного аппарата, выполненного с возможностью висения, по п.13 формулы изобретения.
Предпочтительный, не ограничивающий вариант осуществления настоящего изобретения будет описан в качестве примера, ссылаясь на прилагаемые чертежи, на которых:
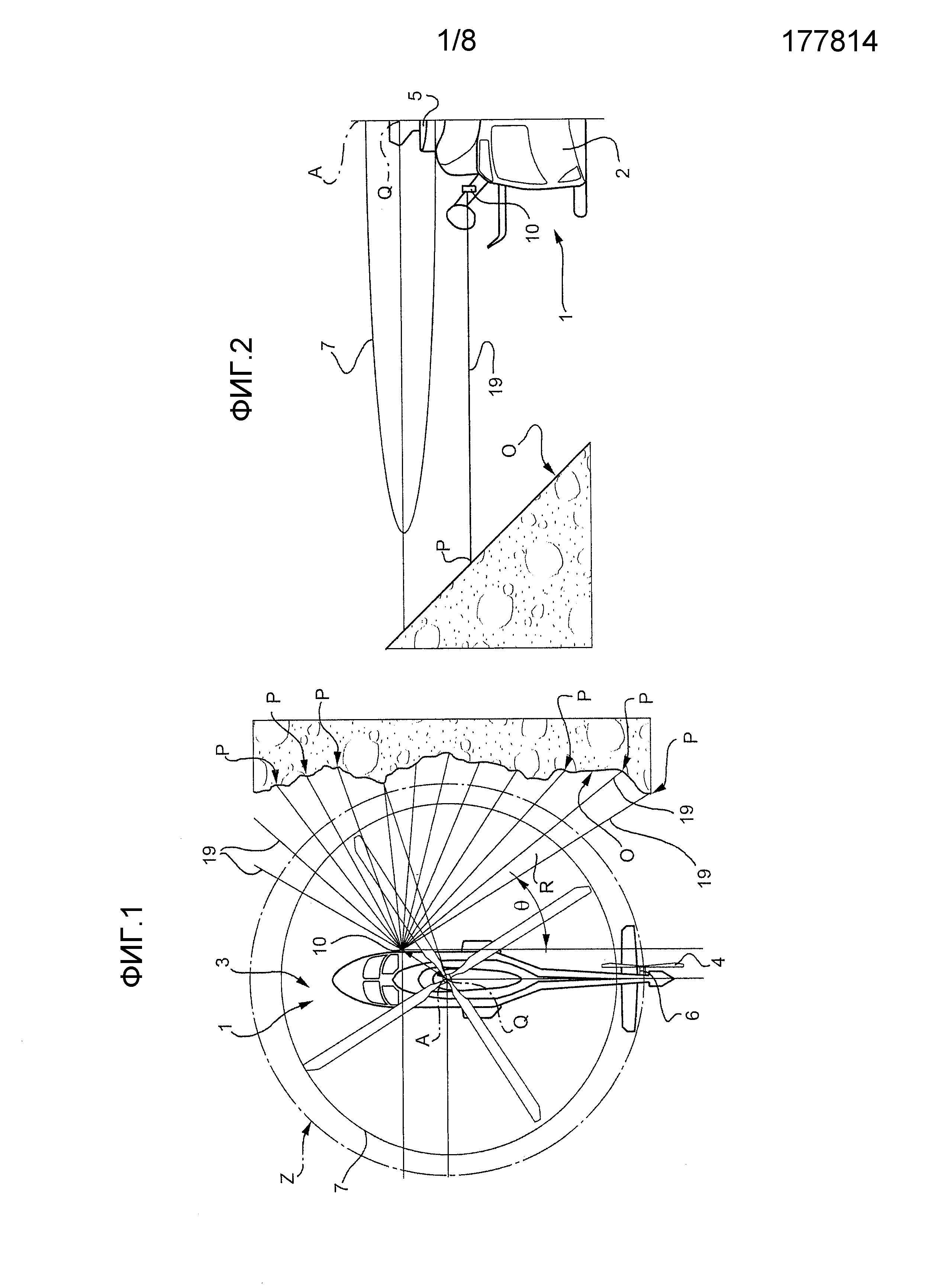
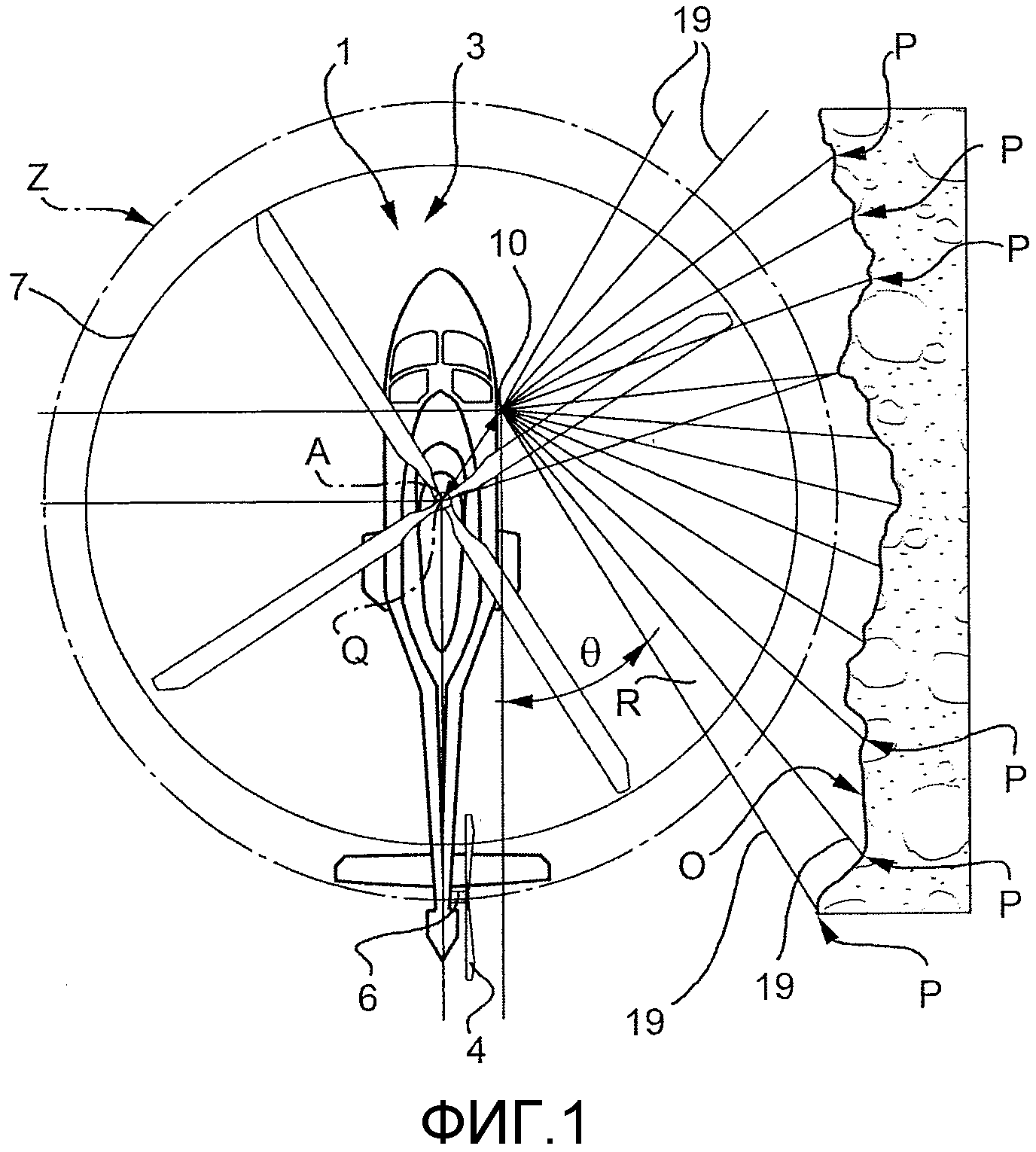
Фиг. 1 показывает вид сверху летательного аппарата с удаленными для ясности частями, выполняющего по существу маневр висения в соответствии с настоящим изобретением;
Фиг. 2 - вид сбоку летательного аппарата с удаленными для ясности частями летательного аппарата фиг. 1;
Фиг. 3 - схема частей летательного аппарата фиг. 1 и фиг. 2;
Фиг. 4 - графический интерфейс летательного аппарата фиг. 1 и фиг. 2;
Фиг. 5 - функциональная схема других частей летательного аппарата фиг. 1 и 2;
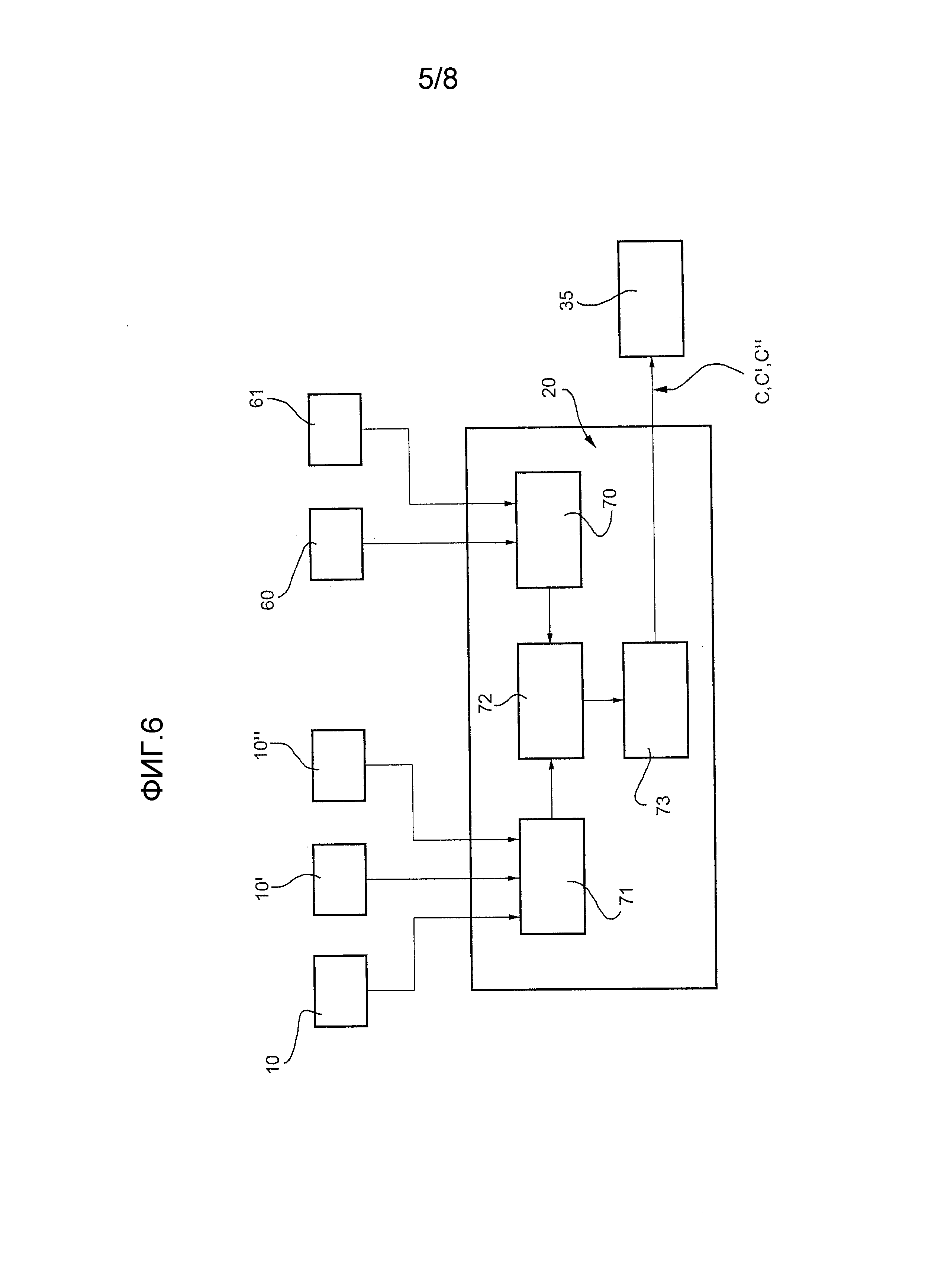
Фиг. 6 - схема части блока управления летательного аппарата фиг. 1 и 2;
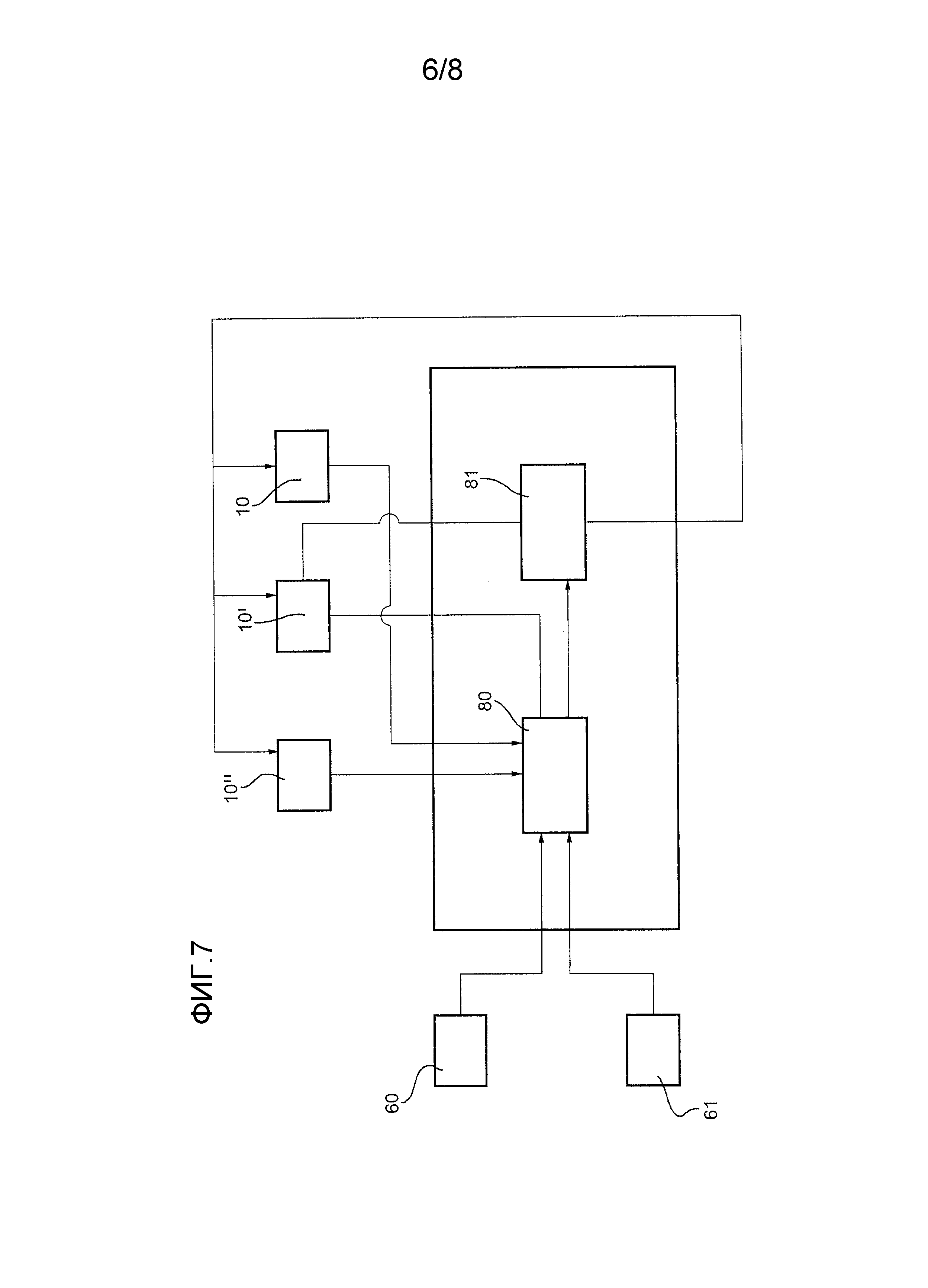
Фиг. 7 - схема дополнительных частей блока управления фиг. 6;
Фиг. 8 - вид сверху, с дополнительными частями, удаленными для ясности, летательного аппарата по фиг. 1 и 2;
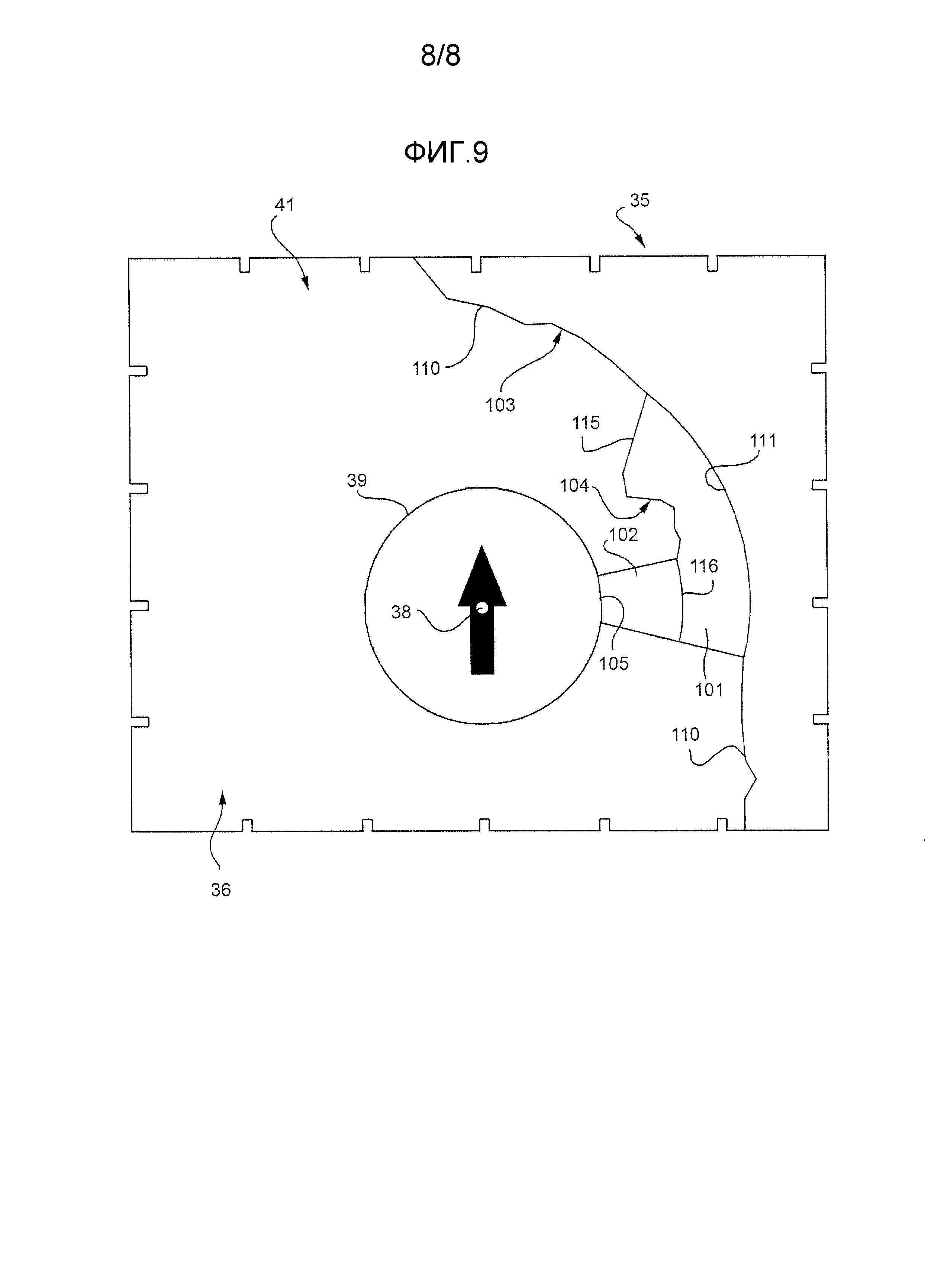
Фиг. 9 - увеличенный вид дополнительных частей интерфейса фиг. 4.
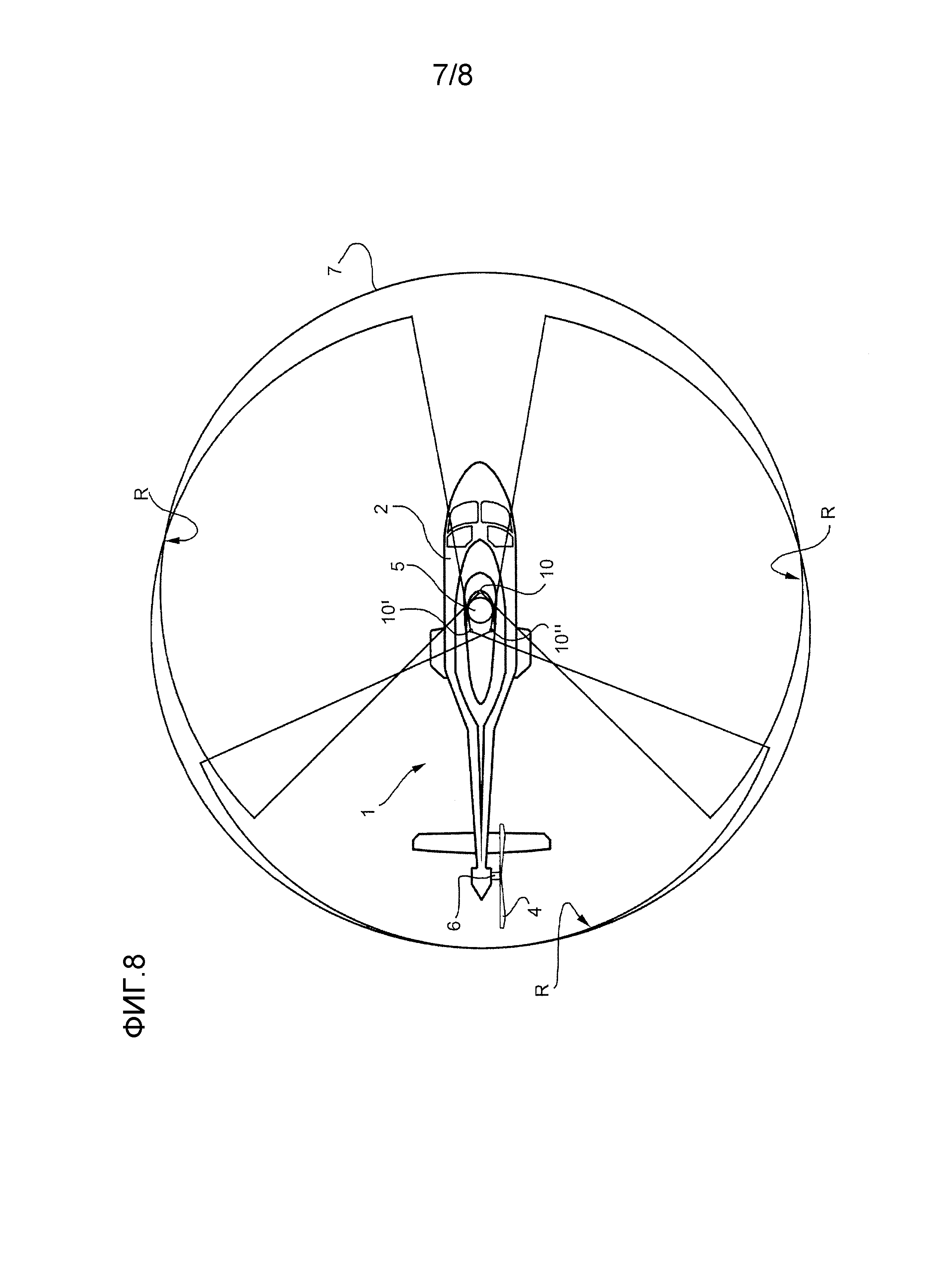
Позиция 1 на фиг. 1 и 2 и 8 указывает летательный аппарат, выполненный с возможностью висения, т.е. поддерживающий полет на постоянной высоте и по существу с нулевой скоростью.
В показанном примере летательный аппарат является вертолетом.
В альтернативном варианте летательный аппарат 1 может быть конвертопланом.
Вертолет 1 по существу содержит фюзеляж 2; несущий винт 3, смонтированный сверху фюзеляжа 2 для вращения вокруг оси А; и хвостовой винт 4, выступающий от хвостового оперения на заднем конце фюзеляжа 2 для противодействия вращательному моменту, передаваемому винтом 3 фюзеляжу 2.
Вертолет 1 содержит приводной вал 5, выступающий из фюзеляжа 2 (фиг. 2), для привода винта 3; и приводной вал 6, выступающий из хвостового оперения (фиг. 1), для привода винта 4.
Вертолет 1 содержит:
- несколько датчиков 10, 10′, 10″ (только один показан на фиг. 1), каждый из которых имеет плоскую область R охвата (только одна показана на фиг. 1), и предназначен для получения во время маневра висения вертолета первых значений расстояний С, С′, С″ между точками Р на препятствии О и точной Q на вертолете; и блок управления 20, предназначенный для формирования сигнала тревоги, когда одна из точек Р находится в пределах области Z безопасности, содержащей точку Q.
Преимущественно каждый из датчиков 10, 10′, 10″ окружает приводной вал 6.
В показанном примере количество датчиков 10, 10′, 10″ равно трем, а соответствующие области R лежат в соответствующих отдельных параллельных плоскостях.
Более точно датчики 10, 10′, 10″ расположены около вала 5 (фиг. 8), а соответствующие области R перекрываются, несмотря на то, что лежат в соответствующих отдельных плоскостях.
В примере фиг. 1 точка Q определена пересечением оси А и плоскостью диска 7 винта 3.
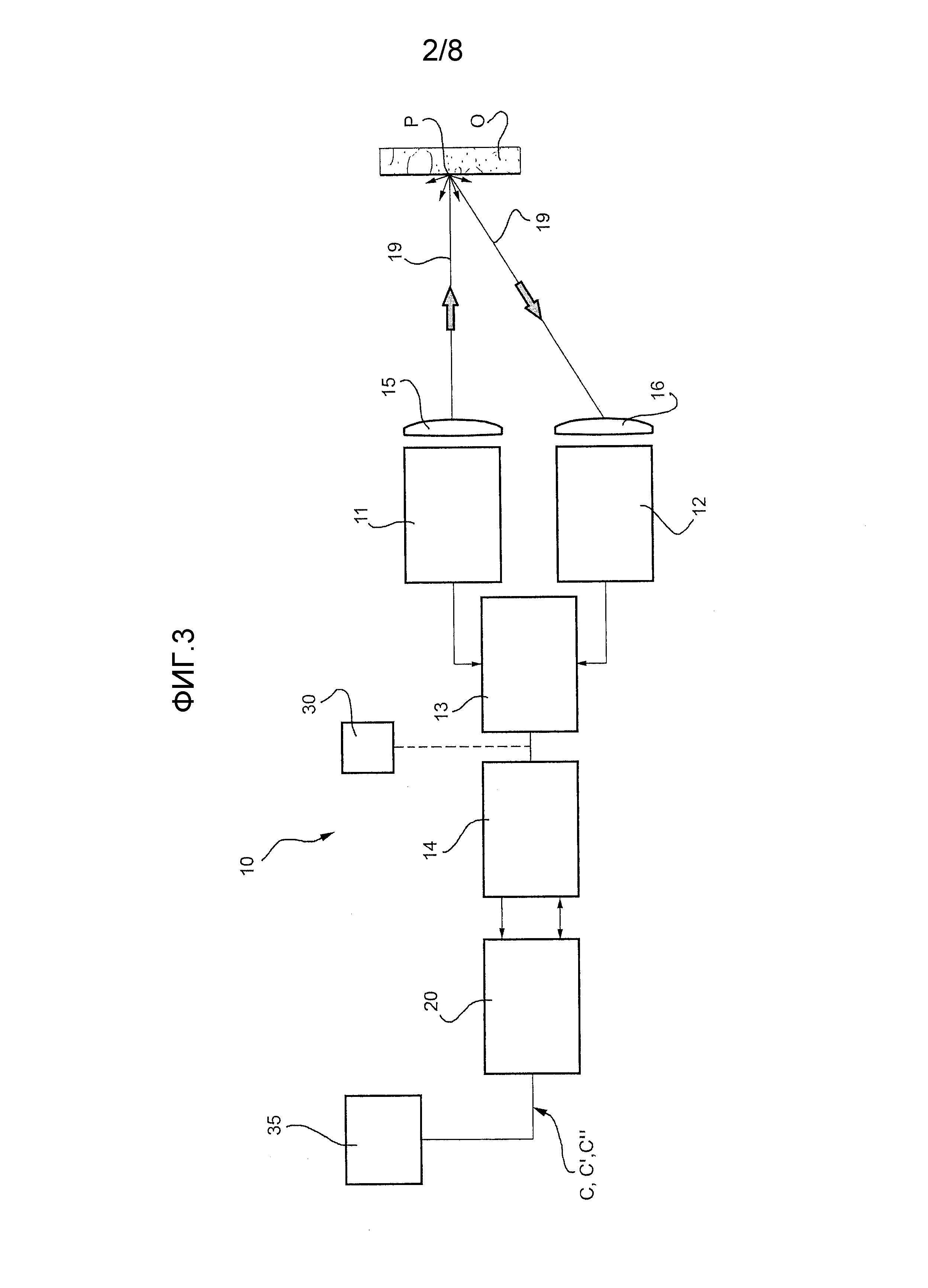
Ссылаясь на фиг. 3, каждый датчик 10 по существу содержит:
- излучатель 11 для излучения электромагнитного излучения в плоскости, соответствующей области R на точки P на препятствии O;
- приемник 12 для приема электромагнитного излучения, отражаемого точками P на препятствии O;
- хронометр 13 для измерения интервала времени между тем, как излучатель 11 распространит электромагнитное излучение, а приемник 12 примет отраженное электромагнитное излучение; и
- компьютер 14 для определения расстояний C, C', C" между точками P и точкой Q на основе интервала времени, измеренного хронометром 13.
В показанном примере, излучатель 11 является лазерным диодом, содержащим передающие линзы 15 лазера; и приемник 12 является фотодиодом, содержащим принимающие линзы 16 лазера.
Излучатель 11 излучает несколько лазерных лучей 19, каждый из которых образует угол θ с фиксированной осью (фиг. 1).
Более точно, компьютер 14 определяет расстояния между точками P и приемником 12 на основании интервала времени, измеренного хронометром 13, и определяет расстояния C, C', C" между точками P и точкой Q на основании геометрических данных вертолета.
Блок 20 управления также предназначен для определения на основании расстояний C, C', C", измеренных датчиками 10, 10', 10", направления D рекомендуемого возврата, в котором отводить вертолет назад от препятствия O (фиг. 5).
В первом варианте осуществления настоящего изобретения направление D соответствует направлению соединения точки Q и точки P на препятствии O, самой ближней к точке Q.
В другом варианте осуществления настоящего изобретения направление D определяется блоком 20 управления с учетом формы препятствия O в области точки P, наиболее близкой к точке Q.
Область Z безопасности предпочтительно является кругом с центром в точке Q.
Более точно, радиус области Z безопасности равен сумме:
- расстояния между осью А и кончиками лопастей несущего винта 3; и
- расстояния безопасности.
Размер области Z безопасности является выборочно регулируемым пользователем, в частности пилотом.
Предпочтительно размер области Z безопасности является регулируемым пользователем, используя гомотетию, т.е. преобразование, которое сохраняет углы между тангенсами к двум точкам на контуре области Z безопасности.
Например, если область Z безопасности является кругом, пользователь может редактировать радиус круга.
Другими словами, пользователь может устанавливать различные границы обеспечения безопасности маневрирования, т.е. чем меньше зона области Z безопасности, тем меньше граница безопасности.
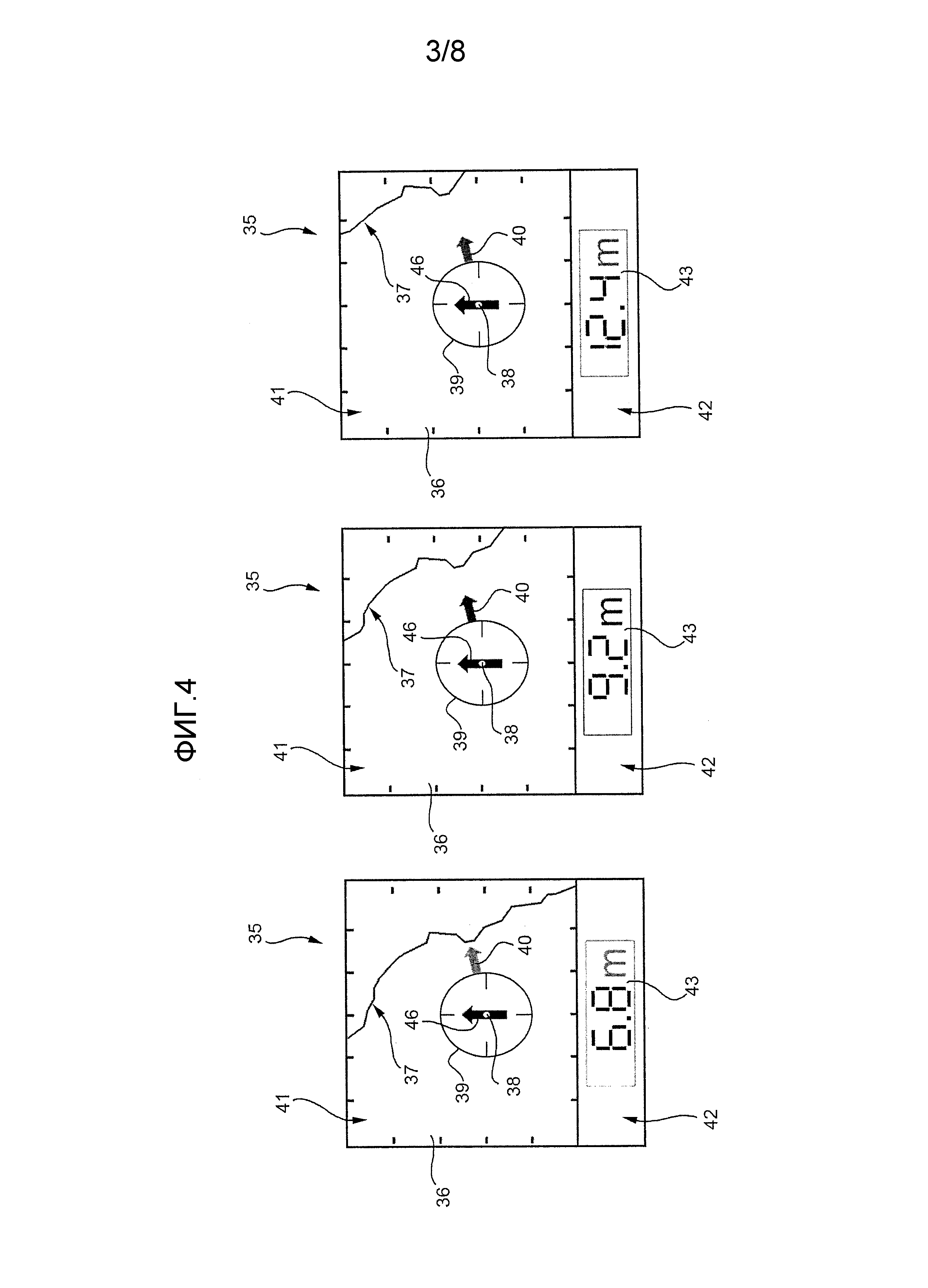
Вертолет 1 также содержит (фиг. 5):
- систему 25 автопилота;
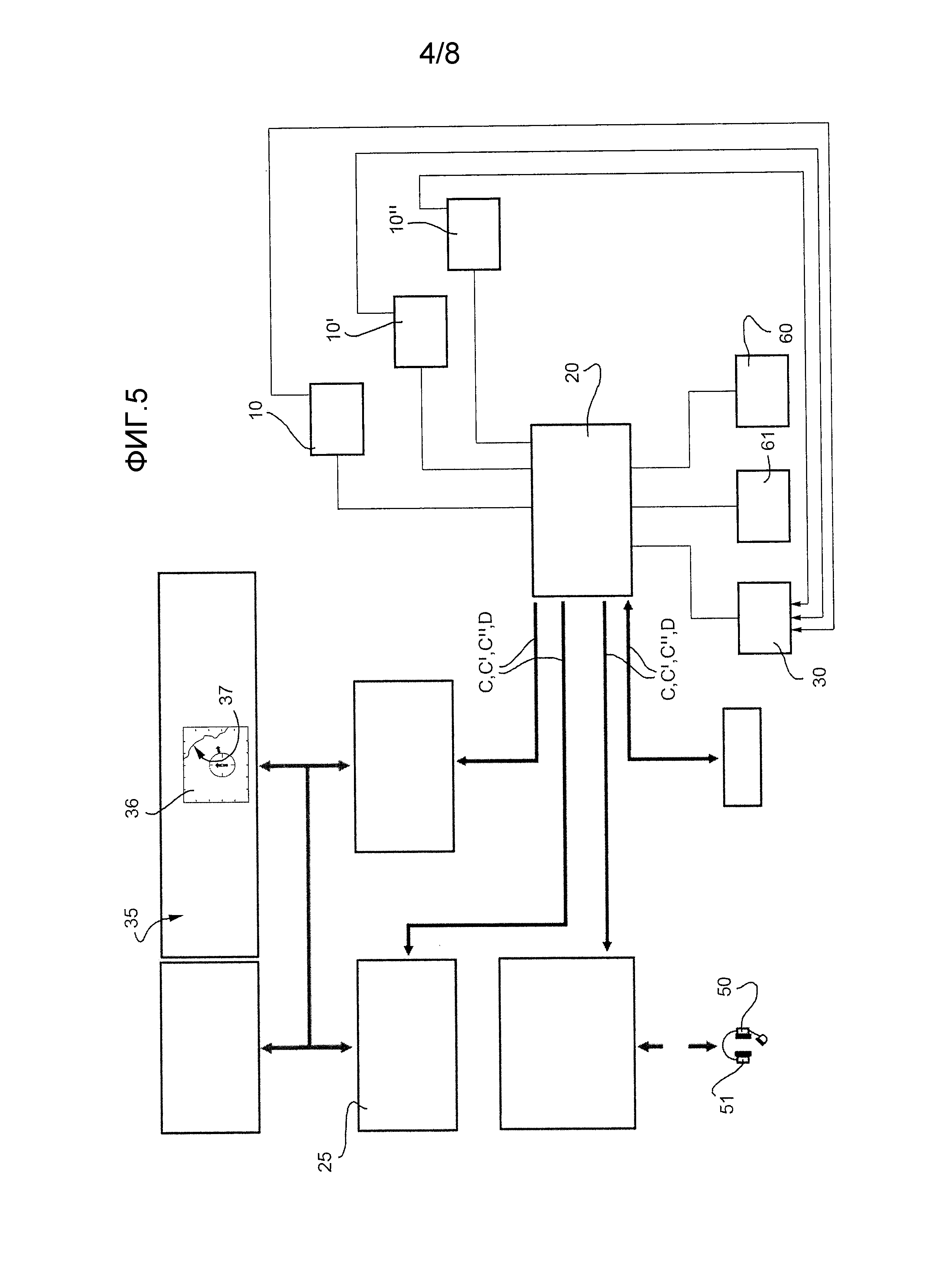
- систему 30 фильтров, содержащую несколько фильтров (не показаны), которые могут быть активированы пилотом по одному или вместе для ослабления шума или для совершенствования значений расстояний C, C', C", получаемых датчиками 10, 10', 10", с тем, чтобы поставлять отфильтрованные значения расстояний C, C', C" к выходу блока 20 управления; и
- графический интерфейс 35 для отображения пользователю информации, которая управляется блоком 20 управления на основе значений расстояний C, C', C", получаемых датчиками 10, 10', 10", и возможно отфильтрованных системой 30 фильтров.
Более точно, блок 20 управления предназначен для того, чтобы подавать команды системе 25 об отведении вертолета назад от препятствия O, когда, по меньшей мере, одна точка P на препятствии O лежит в пределах области Z безопасности.
Блок 20 управления предпочтительно предназначен для того, чтобы подавать команды системе 25 для перевода вертолета в направление D.
Каждый фильтр в системе 30 фильтров по существу содержит каскад сравнения (не показан) для сравнения значений расстояний C, C', C", измеренных датчиками 10, 10', 10", между одной или более точками P и точкой Q; и генерирующий каскад (не показан) для генерирования отфильтрованных значений расстояний C, C', C".
Первый фильтр определяет присутствие множественного электромагнитного излучения от одного и того же угла θ и выбирает наибольшее значение расстояния C, C', C". Первый фильтр служит для устранения полупрозрачных объектов, как, например, снежинок, которые вызывают множество отражений.
Второй фильтр последовательно принимает значения расстояний C, C', C", измеренные датчиками 10, 10', 10", в последующие моменты времени при одном и том же угле θ; а генерирующий каскад второго фильтра генерирует отфильтрованные значения расстояний C, C', C", равные среднему арифметическому значению, значению подвижности или медиане вышеупомянутых значений расстояний C, C', C".
Третий фильтр принимает значения расстояний C, C', C" смежных точек P, измеренных в тот же момент времени датчиками 10, 10', 10"; а генерирующий каскад третьего фильтра генерирует для каждого угла θ соответствующее отфильтрованное значение расстояний C, C', C", равное сочетанию значения, измеренного при угле θ, и функции значений, измеренных при дополнительных углах θ.
Четвертый фильтр содержит каскад сравнения, который принимает значения расстояний C, C', C" и сравнивает значения расстояний C, C', C", измеренные датчиками 10, 10', 10" между теми же самыми точками P и точкой Q; и генерирующий каскад (не показан) для генерирования отфильтрованных значений расстояний C, C', C".
Важно заметить, что четвертый фильтр сравнивает значения расстояний C, C', C" между точкой Q и точками P, лежащими, по меньшей мере, в двух перекрывающихся областях R охвата, по меньшей мере, двух соответствующих датчиков 10, 10", 10".
Каскад сравнения четвертого фильтра выполнен с возможностью:
- оценивать, на основании гипотетической трехмерной, например, цилиндрической формы препятствия O, расстояния C, C', C" от нескольких тех же точек P, измеренные датчиками 10, 10', 10";
- сравнить значения расстояний C, C', C", измеренных датчиками 10, 10', 10", между теми же точками P и точкой Q; и
- отбросить, например, значение расстояния (например, значение С), если оно значительно отличается от других значений (C', C").
Четвертый фильтр принимает трехмерную, показанную в примере, цилиндрическую форму препятствия O так, что каждая точка P на препятствии O может быть ассоциирована с расстоянием C от точки Q, измеренным датчиком 10, расстоянием C' от точки Q, измеренным датчиком 10', и расстоянием C" от точки Q, измеренным датчиком 10".
Другими словами, четвертый фильтр устраняет случайные ошибки в значениях расстояний C, C', C", измеренных датчиками 10, 10', 10".
Графический интерфейс 35 содержит графический дисплей 36 для преимущественного отображения (фиг. 4):
- контура 37, представляющего пересечение внешней поверхности препятствия O и, по меньшей мере, одной из областей R;
- точки 38, указывающей местоположение точки Q на вертолете в отношении контура 37;
- указания 39 в форме круга, указывающего контур диска 7 винта 3;
- указания 46 габаритного размера вертолета; и
- вектора 40, указывающего направление D.
Более точно, вектор 40 является параллельным направлению D и направляется от точки Q по направлению к препятствию О (фиг. 4) или от точки Q от препятствия O.
Графический дисплей 36 содержит первую зону 41, показывающую контур 37, точку 38, указания 39, 46 и вектор 40; и вторую зону 42, показывающую указание 43 самого меньшего значения расстояний C, C', C", измеренных датчиками 10, 10', 10", между точкой Q и точками P.
Указание 43 может быть показано различными цветами, в зависимости от наименьшего значения расстояния. Например, когда наименьшее значение расстояния является меньшим нижнего порогового значения, т.е. когда точка Q находится чрезвычайно близко к одной из точек P на препятствии O, указание 43 может быть показано красным цветом.
И наоборот, когда наименьшее значение расстояния является большим верхнего значения порога, т.е. когда точка Q находится на надежном расстоянии от препятствия О, указание 43 может быть показано зеленым цветом.
Когда наименьшее значение расстояния находится между верхним и нижним пороговыми значениями, указание 43 может быть показано желтым цветом.
Блок 20 управления также предназначен для оценки на основании значений расстояний C, C', C", измеренных датчиками 10, 10', 10", а также на основании значений, выбираемых пользователем на графическом интерфейсе 35 (фиг. 9):
- первого набора первых точек P на препятствии, расположенных на расстоянии от точки Q, большем первого выбираемого пользователем значения;
- второго набора вторых точек P на препятствии O, расположенных на расстоянии от точки Q, меньшем первого значения и большем второго выбираемого пользователем значения;
- третьего набора третьих точек P на препятствии O, расположенных на расстоянии от точки Q, меньшем второго и первого значения.
Блок 20 управления также предназначен для того, чтобы отображать на графическом дисплее 36 (фиг. 9):
- зону 100 первым цветом, например, зеленым;
- зону 101 вторым цветом, например, желтым;
- зону 102 третьим цветом, например, красным;
- контур 103, ограничивающий зону 100 со стороны указания 39 и зону 101 со стороны, противоположной указанию 39;
- контур 104, ограничивающий зону 101 со стороны указания 39 и зону 102 со стороны, противоположной указанию 39; и
- контур 105, ограничивающий зону 102 со стороны указания 39, и частично совпадающий с контуром области Z.
Контур 103 содержит один или более, в показанном примере два, участка 110, представляющих точки P на препятствии О, расположенные на расстоянии, большем порогового значения от точки Q, и могут содержать один или более участков 111, соединяющих участки 110, в показанном примере, первой дугой круга с центром в точке 38.
Контур 104 содержит один или более, в показанном примере два участка 115, представляющих точки P на препятствии O, расположенных на расстоянии, меньшем порогового значения от точки Q, и может содержать один или более участков 116, соединяющих участки 115, в показанном примере второй дугой круга с центром в точке 38 и меньшей в радиусе, чем первая дуга. Контур 104 имеет общие противоположные концы с контуром 103.
Контур 105 имеет общие противоположные концы с контуром 104.
Зона 100, ограниченная контуром 103, таким образом представляет зону препятствия О на надежном расстоянии от точки Q, и таким образом, не осуществляет угрозы для безопасности вертолета. Зона 101, ограниченная контуром 103 и 104, представляет зону препятствия O на среднем расстоянии от точки Q. А зона 102, ограниченная контурами 104 и 105, представляет зону в пространстве, близком к препятствию О, и от которой пилот должен отводить вертолет.
В случае неисправности любого одного из датчиков 10, 10', 10", блок 20 управления выполнен с возможностью указывать на дисплее 36 участок контура препятствия О, не охваченный неисправным датчиком 10, 10', 10".
В случае неисправности любого одного из датчиков 10, 10', 10", блок 20 управления выполнен с возможностью указывать на дисплее 36 на основе значений расстояний C, C', C", измеренных другими датчиками 10, 10', 10", реконструированный контур участка контура препятствия О, не охваченный неисправным датчиком 10, 10', 10".
Вертолет 1 также содержит измерительный преобразователь 50 для генерирования первого акустического сигнала внутри первого наушника шлемофона пользователя; и измерительный преобразователь 51 для генерирования второго акустического сигнала внутри второго наушника шлемофона (фиг. 5).
Блок 20 управления также выполнен с возможностью:
- приема сигнала, например, сгенерированного инерциальной платформой, интегрированной в шлемофон пользователя, и составляющей единое целое с первым и вторым каналом под углом - ассоциированную с углом между осью, составляющей единое целое со шлемофоном пользователя и фиксированной осью; и
- подачи команд передачи через измерительные преобразователи 50, 51 на основании вышеупомянутого сигнала, ассоциированного с вышеупомянутым углом соответствующих акустических сигналов стереофонически представляющих направление D.
В одном конкретном варианте осуществления настоящего изобретения, блок 20 управления выполнен с возможностью:
- не подавать команду передачи акустического сигнала через измерительные преобразователи 50, 51, когда наименьшее значение расстояний C, C', C", измеренных датчиками 10, 10', 10", между точкой Q и точками P, является большим выбираемого пользователем порогового значения;
- подавать команду передачи прерывистых акустических сигналов через измерительные преобразователи 50, 51 когда вышеупомянутое наименьшее значение является меньшим первого порогового значения, а вышеупомянутое второе выбираемое пользователем пороговое значение меньше, чем первое пороговое значение; и
- подавать команду передачи постоянных сигналов через измерительные преобразователи 50, 51, когда вышеупомянутое наименьшее значение является меньшим второго порогового значения.
Блок 20 управления предпочтительно выполнен с возможностью генерировать несколько дополнительных пороговых значений между первым и вторым пороговыми значениями, и генерировать акустический сигнал тревоги всякий раз, когда вышеописанное наименьшее значение является меньшим соответствующего дополнительного порогового значения.
Другими словами, блок 20 управления генерирует несколько сигналов тревоги, как только вышеупомянутое наименьшее значение падает от первого ко второму пороговому значению в результате еще большего приближения вертолета к препятствию О.
Дополнительные пороговые значения неравномерно удалены между первым и вторым пороговым значением, но более кучно расположены по направлению ко второму пороговому значению.
В альтернативном варианте, когда скорость перемещения вертолета в направлении D превосходит заданное значение, блок 20 управления может генерировать непрерывный акустический сигнал, даже когда упомянутое наименьшее значение является большим второго порогового значения.
Вертолет 1 также содержит:
- детектирующее устройство 60 (фиг. 5), например, GPS-приемник для определения абсолютного местоположения значимой точки, например, центра тяжести вертолета; и
- инерциальную платформу 61 (фиг. 5) для определения абсолютного угла поворота между осью, составляющей одно целое с вертолетом, и фиксированной осью в пространстве.
Другими словами, детектирующее устройство 60 и инерциальная платформа 61 определяют три степени свободы, определяющие перемещение вертолета в плоскости, параллельной плоскостям областей R охвата датчиков 10, 10', 10".
Но основании временных моделей положения центра тяжести вертолета и углов поворота между осью, составляющей единое целое с вертолетом, и фиксированной осью в пространстве, определенном детектирующим устройством 60 и инерциальной платформой 61, блок 20 управления выполнен с возможностью оценивать опорный закон движения вертолета в пределах плоскости. Термин "опорный закон движения" подразумевает временную модель линейной скорости центра тяжести вертолета, линейное ускорение центра тяжести вертолета, а также угловую скорость и ускорение вертолета.
Опорный закон движения получается выведением временной модели абсолютного положения цента тяжести, определенного детектирующим устройством 60, и временной модели угла поворота, определенным инерциальной платформой.
Блок 20 управления также запрограммирован так, чтобы:
- определять фактический закон движения вертолета на основании временной модели расстояний C, C', C", измеренных датчиками 10, 10', 10" между точками P и точкой Q,
- сравнивать фактический закон движения с опорным законом движения вертолета; и
- генерировать сигнал неисправности, указывающий неисправность датчиков 10, 10', 10", когда значимое значение, например норма разницы между фактическим и опорным законом движения превосходит заданное пороговое значение.
Важно заметить, что блок 20 управления выполнен с возможностью определять фактический закон движения вертолета, предполагая, что препятствие О зафиксировано в пространстве.
Более точно, блок 20 управления содержит (фиг. 6):
- каскад 70 оценки опорного закона движения, управляемый детектирующим устройством 60 и инерциальной платформой 61;
- каскад 71 оценки фактического закона движения, управляемый датчиками 10, 10', 10";
- каскад 72 сравнения, управляемый каскадами 70, 71 оценки, и запрограммированный для оценки значимого значения, например, нормы разности между опорным и фактическим законом движения; и
- генерирующий каскад 73, управляемый каскадом 72 сравнения, и запрограммированный для генерирования сигнала неисправности, указывающего неисправность датчиков 10, 10', 10", когда значимое значение, вычисленное каскадом 72 сравнения, превышает заданное пороговое значение.
Блок 20 управления также запрограммирован:
- сравнивать законы движения, определенные, по меньшей мере, двумя датчиками 10, 10' с опорным законом движения, определенным на основании измерений детектирующим устройством 60 и инерциальной платформой 61; и
- соответственно генерировать сигнал для корректировки, по меньшей мере, одного из датчиков 10, 10'.
Другими словами, абсолютный фактический закон движения является теоретически некоррелированным, а это значит, что любая корреляция между ними может указывать присутствие системных ошибок в измерении расстояний C, C, C", датчиками 10, 10', 10".
Блок 20 управления определяет любую корреляцию сравнением законов движения, определенных, по меньшей мере, двумя датчиками 10, 10' с опорным законом движения, и соответственно генерирует сигнал для корректировки датчиков 10, 10'.
С этой целью блок 20 управления содержит (фиг. 7):
- каскад 80 сравнения, управляемый, по меньшей мере, двумя датчиками 10, 10' при помощи детектирующего устройства 60 и инерциальной платформы 61, и программируемый для вычисления корреляции между законом движения, определенным на основании расстояний C, C', C", измеренных датчиками 10, 10', 10", и опорным законом движения, определенным на основе измерений инерциальной платформы 61 и детектирующего устройства 60; и
- каскад 81 корректировки, управляемый каскадом 80 сравнения и запрограммированный для корректировки расстояний C, C', измеренных, по меньшей мере, одним из датчиков 10, 10'.
Программное обеспечение, загружаемое и выполняемое на блоке 20 управления, управляет графическим интерфейсом 35 и/или системой 25 и/или системой 30 фильтров, и/или регулирует размер области Z безопасности.
Далее будет описана работа вертолета 1 при условиях полета, в которых скорость перемещения вертолета по существу является нулевой в горизонтальной плоскости или плоскости, перпендикулярной направлению вверх/вниз вертолета, например, во время взлета, посадки или спасательной и/или восстановительной операции.
Пользователь, например, пилот вертолета, выбирает значение зоны области Z безопасности для заданной границы безопасности, и если условия работы обязывают, может также активировать один или более фильтров в системе 30 фильтров.
Датчики 10, 10', 10" охватывают соответствующие области R для определения нескольких расстояний C, C', C" между точками P на препятствии О и точкой Q на вертолете.
Более точно, излучение лазера излучается излучателем 11 каждого датчика 10, 10', 10" в соответствующую область R и отражается точками P на препятствии O к соответствующему приемнику 12.
Хронометр 13 каждого датчика 10, 10', 10" измеряет промежуток времени между излучением и приемом излучения лазера, а компьютер 14 вычисляет расстояния C, C', C" между точкой Q и каждой точкой на препятствии O в пределах областей R охвата датчиков 10, 10', 10".
Если расстояния C, C', C", по меньшей мере, между одной точкой P и точкой Q являются такими, что точка P лежит в пределах области Z безопасности, блок 20 управления генерирует сигнал тревоги.
Если система 25 автопилота включена, блок 20 управления подает команду отвести вертолет назад от препятствия О, когда, по меньшей мере, одна точка P на препятствии О лежит в пределах области Z безопасности.
На основании расстояний C, C', C" блок 20 управления также вычисляет рекомендованное направление D возврата.
В зоне 41 дисплея 36 графического интерфейса 35 блок 20 управления подает команду отображения контура 37, представляющего пересечение внешней поверхности препятствия О и одной из областей R; точки 38, указывающей местоположение точки Q в отношении контура 37; указания 39, представляющего диск 7 винта 3; вектора 40, ассоциированного с направлением D и направленного от точки 38 по направлению к или от контура 37; и указания 46, показывающего габаритный размер вертолета.
В зоне 42 дисплея 36, блок 20 управления подает команду отображать указание 43, показывающее значение наименьшего расстояния C, C', C", измеренного датчиками 10, 10', 10" между точкой Q и точками P на препятствии О.
Блок 20 управления предпочтительно также подает команды отображения зон 100, 101, 102 на дисплее 36.
В одном варианте осуществления изобретения блок 20 управления также подает команды передачи через измерительные преобразователи 50, 51 соответствующих звуковых сигналов для предоставления пользователю стереофонического указания направления D.
Если система 25 автопилота включена, блок 20 управления подает команды ей отвести вертолет назад от препятствия О в направлении, параллельном направлению D.
В одном конкретном варианте осуществления изобретения в случае фиксированного препятствия О, как, например, горы, блок 20 управления вычисляет фактический закон движения вертолета на основании временной модели расстояний C, C', C", измеренных датчиками 10, 10', 10".
Блок 20 управления также определяет опорный закон движения вертолета на основе положений центра тяжести вертолета и абсолютных углов поворота, определенных детектирующим устройством 60 и инерциальной платформой 61.
В заключение, блок 20 управления сравнивает опорный закон движения вертолета, определенный на основании измерений детектирующего устройства 60 и инерциальной платформы 61, с фактическим законом движения вертолета, определенным на основе расстояний C, C', C", измеренных датчиками 10, 10', 10", и генерирует сигнал неисправности, когда значимое значение разницы между опорным законом движения и фактическим законом движения превышает заданное пороговое значение.
Таким образом пользователь предупреждается о возможности неисправности датчиков 10, 10', 10".
Блок 20 управления предпочтительно определяет корреляцию между фактическим законом движения, определенным каскадом 71 оценки, и опорным законом движения вертолета, определенным каскадом 70 оценки, и соответствующим образом корректирует значения расстояний C, C'.
Преимущества летательного аппарата 1, способа и графического интерфейса 35 согласно настоящему изобретению будут очевидны из вышеприведенного описания.
В частности датчики 10, 10', 10" (или только один датчик 10, 10', 10'') и блок 20 управления автоматически информируют пользователя о том, что, по меньшей мере, одна точка P на препятствии О лежит в пределах области Z безопасности, т.е. что вертолет находится слишком близко к препятствию О.
Следовательно, это защищает от потенциальных ситуаций столкновения, вызванных ошибками принятия решений в части при спасательных/восстановительных операциях при оценке положения вертолета в отношении препятствия О и/или ошибками связи между пилотом и оператором, ответственного за визуальное отслеживание препятствия О.
Более того, датчики 10, 10', 10" (или только один датчик 10), окружающие вал 6 летательного аппарата 1, могут быть эффективно использованы в довольно конкретном сценарии работы, т.е. очень близко к фиксированным и/или подвижным препятствиям, когда пилот подбирает минимальное расстояние между препятствием и летательным аппаратом 1. Типичными примерами такого сценария являются взлет и/или посадка на корабль, выполнение спасательных или восстановительных операций в чрезвычайных ситуациях и/или в расположениях с плохим доступом, как например, при горных или морских спасательных операциях.
В действительности в таких случаях, если летательный аппарат сильно приближается к препятствию О, существует необходимость в генерировании сигнала тревоги для пилота, который соответственно отводит летательный аппарат 1 назад.
В таком сценарии, область охвата датчиков 10, 10', 10'' или только одного датчика 10, 10', 10'', находится очень близко к плоскости несущего винта 3. Соответственно, датчики 10, 10', 10'' или только один датчик 10 детектирует присутствие препятствия О в плоскости, которая находится очень близко и по существу совпадает с плоскостью несущего винта 3.
Следовательно, немедленно детектируется присутствие препятствия в непосредственной близости от несущего винта, и соответственно генерируется сигнал тревоги.
Размер области Z безопасности является выборочно корректируемым, а работа блока 20 управления может быть адаптирована пользователем для различных рабочих ситуаций.
Выборочно активизируемая система 30 фильтров дает возможность пользователю устранять шум, вызванный конкретными атмосферными условиями и/или условиями работы.
Рекомендованное направление D возврата, определенное блоком 20 управления, является чрезвычайно важным средством для пользователя при отведении назад от препятствия О.
Графический интерфейс 35 особенно полезен предоставлением пользователю на одном приборе четко читаемого указания контура 37 препятствия О, направления D и положения контура области Z безопасности в отношении препятствия О. Вся информация, относящаяся к направлению D, и помехи, присутствующие в любой заданной спасательной/восстановительной работе, могут быть таким образом незамедлительно приняты во внимание пилотом с минимальным пределом погрешности, который может иметь решающее значение в терминах безопасности.
Тот факт, что блок 20 управления в случае фиксированного препятствия О сравнивает фактический закон движения вертолета, определенный датчиками 10, 10', 10", с опорным законом движения означает то, что пилот незамедлительно уведомляется о неисправности датчиков 10, 10', 10".
При оценке корреляции между расстояниями C, C', измеренными, по меньшей мере, двумя датчиками 10, 10', и соответственно коррекцией значений расстояний C, C', блок 20 управления снабжает пилота и графический интерфейс 35 сигналом тревоги и/или весьма точным указанием рекомендованного направления возврата, при отсутствии системных ошибок.
Очевидно, летательный аппарат, способ и графический интерфейс 35, как описано в материалах настоящей заявки, могут иметь изменения, не выходя из объема охраны настоящего изобретения.
В частности летательный аппарат может содержать только один датчик 10, который окружает вал 6.
Винт вертолета, содержащий гаситель колебаний
Опорный узел для ручек управления вертолетом
Летательный аппарат
Летательный аппарат
Убирающееся посадочное шасси вертолета
Шасси летательного аппарата (варианты)
Невращающийся универсальный шарнир для привода вертолета
Летательный аппарат, выполненный с возможностью висения
Винт вертолета, содержащий гаситель колебаний
Опорный узел для ручек управления вертолетом
Летательный аппарат
Летательный аппарат
Убирающееся посадочное шасси вертолета
Шасси летательного аппарата (варианты)
Невращающийся универсальный шарнир для привода вертолета
Летательный аппарат, выполненный с возможностью висения

