Результат интеллектуальной деятельности: ПРИВОДНОЕ УСТРОЙСТВО
Вид РИД
Изобретение
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
[0001] Настоящее изобретение относится к приводному устройству или механизму, имеющему редуктор с зубчатой передачей на основе волнового движения.
Уровень техники
[0002] Как раскрыто в патентном документе 1, приводное устройство для приведения в действие приводимого модуля, такого как механизм регулирования степени сжатия, с помощью модуля приведения в действие, такого как электромотор, использует редуктор с зубчатой передачей на основе волнового движения или напряженной волновой зубчатой передачей, предоставляющий большее передаточное число, с тем чтобы уменьшать размер и выходную мощность модуля приведения в действие и улучшать управляемость.
[0003] Этот редуктор или понижающая передача включает в себя жесткое колесо (шестерню) из жесткого тела, имеющее зубья с внутренним зацеплением, сформированные на внутренней окружности, генератор волн, расположенный коаксиально в жестком колесе, и гибкое колесо (шестерню), которое располагается коаксиально между генератором волн и жестким колесом, которое упруго деформируется посредством генератора волн в эллиптическую форму и которое имеет зубья с внешним зацеплением, сформированные на наружной окружности гибкого колеса, и выполнено с возможностью зацепляться с вышеуказанными зубьями с внутренним зацеплением в двух позициях в направлении главной оси эллиптической формы. В этой конструкции, жесткое колесо и гибкое колесо выполнены с возможностью вращаться относительно друг друга на величину вращения или угловую величину, соответствующую разности числа зубьев между зубьями с внутренним зацеплением и зубьями с внешним зацеплением, относительно одного оборота генератора волн.
ДОКУМЕНТЫ ПРЕДШЕСТВУЮЩЕГО УРОВНЯ ТЕХНИКИ
ПАТЕНТНЫЕ ДОКУМЕНТЫ
[0004] Патентный документ 1. JP2011-169152A
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
ЗАДАЧА, КОТОРАЯ ДОЛЖНА БЫТЬ РЕШЕНА ИЗОБРЕТЕНИЕМ
[0005] Редуктор с зубчатой передачей на основе волнового движения с такой конструкцией имеет небольшой размер, маленький вес и допускает предоставление большего передаточного числа. С другой стороны, редуктор с зубчатой передачей на основе волнового движения может подвергаться так называемому защемлению, обозначающему проскальзывание или сдвиг позиции или позиций зацепления между зубьями с внутренним и внешним зацеплением редуктора, когда прикладывается чрезмерный крутящий момент, превышающий крутящий момент допустимой нагрузки. Следовательно, в случае конструкции для считывания позиции вращения или угловой позиции входного вала, соединенной с модулем приведения в действие, чтобы управлять состоянием приведения в действие модуля приведения в действие, к примеру, электромотора, например, система неспособна определять защемление, если оно образуется, и, следовательно, считываемая величина или считываемое значение отклоняется от фактической позиции приведения в действие (фактической степени сжатия).
СРЕДСТВО РЕШЕНИЯ ЗАДАЧИ
[0006] Настоящее изобретение разработано с учетом этой ситуации, и его цель заключается в том, чтобы предоставлять новое приводное устройство или систему, допускающее точную оценку или определение возникновения защемления в редукторе с зубчатой передачей на основе волнового движения.
[0007] Приводное устройство или система согласно настоящему изобретению содержит секцию приведения в действие; приводимую секцию, приводимую в действие посредством секции приведения в действие; и редуктор, расположенный между секцией приведения в действие и приводимой секцией и выполненный с возможностью передавать вращение на пониженной частоте из входного вала, соединенного с секцией приведения в действие, на выходной вал, соединенный с приводимой секцией. Редуктор представляет собой редуктор с зубчатой передачей на основе волнового движения, включающий в себя жесткое колесо из жесткого тела, включающее в себя внутреннюю окружность, сформированную с зубьями с внутренним зацеплением, генератор волн, расположенный коаксиально в жестком колесе, и гибкое колесо, которое располагается коаксиально между генератором волн и жестким колесом, которое выполнено с возможностью упруго отклоняться в эллиптическую форму посредством генератора волн и которое включает в себя наружную окружность, сформированную с зубьями с внешним зацеплением, зацепляющимися с зубьями с внутренним зацеплением в двух позициях зацепления в направлении главной оси эллиптической формы. Жесткое колесо и гибкое колесо выполнены с возможностью вращаться относительно друг друга на величину, соответствующую разности числа зубьев, которая представляет собой разность между числами зубьев с внутренним зацеплением и зубьев с внешним зацеплением, когда генератор волн вращается на один оборот.
[0008] Кроме того, согласно настоящему изобретению, предусмотрены секция считывания угла поворота входного вала для того, чтобы считывать позицию вращения или угловую позицию входного вала редуктора, и секция считывания угла поворота выходного вала для того, чтобы считывать позицию вращения или угловую позицию выходного вала редуктора. Приводное устройство или система выполнена с возможностью оценивать возникновение защемления, которое представляет собой проскальзывание позиции зацепления или позиций зацепления зубьев с внутренним зацеплением и зубьев с внешним зацеплением, когда расхождение или разность между считываемой величиной или считываемым значением секции считывания угла поворота входного вала и считываемой величиной или считываемым значением секции считывания угла поворота выходного вала превышает или равна предварительно определенному значению.
ПРЕИМУЩЕСТВА ИЗОБРЕТЕНИЯ
[0009] Согласно настоящему изобретению, устройство может точно оценивать или определять возникновение защемления посредством использования считываемой величины секции считывания угла поворота входного вала и считываемой величины секции считывания угла поворота выходного вала. Следовательно, устройство может надлежащим образом разрешать проблемы, такие как уменьшение управляемости, вызываемое посредством защемления.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
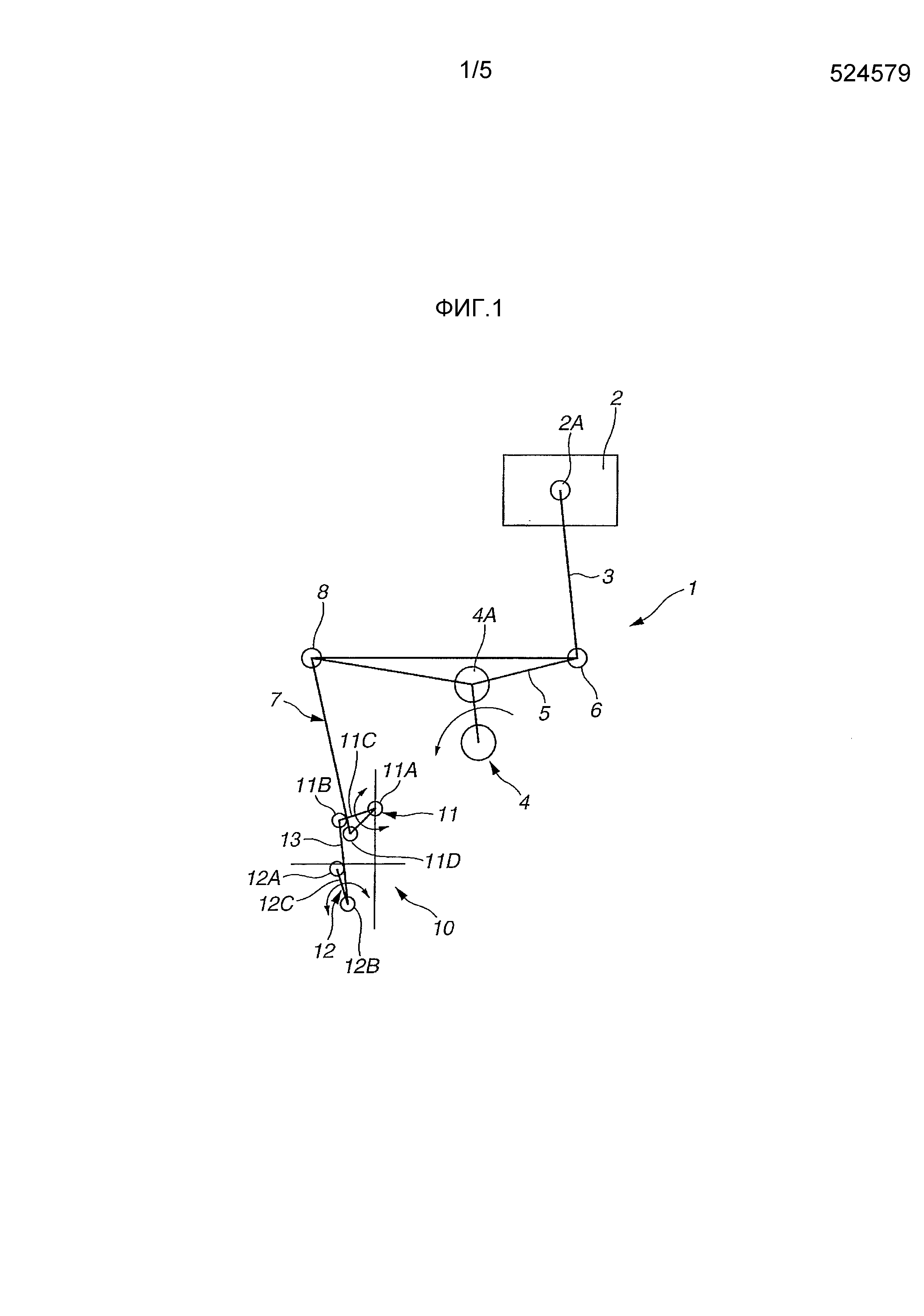
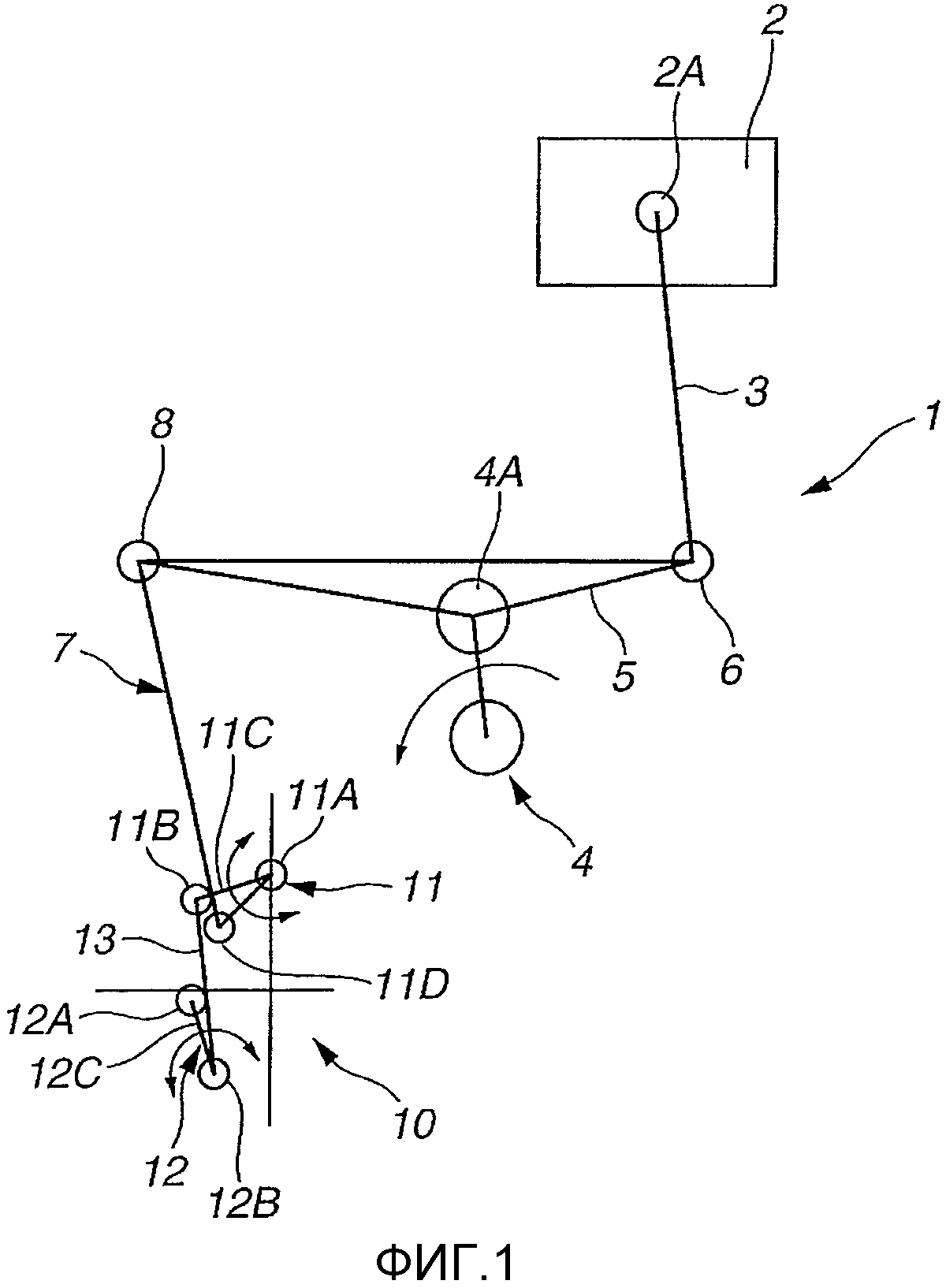
[0010] Фиг. 1 является конструктивным видом, схематично показывающим механизм регулирования степени сжатия в качестве приводимой секции согласно одному варианту осуществления настоящего изобретения.
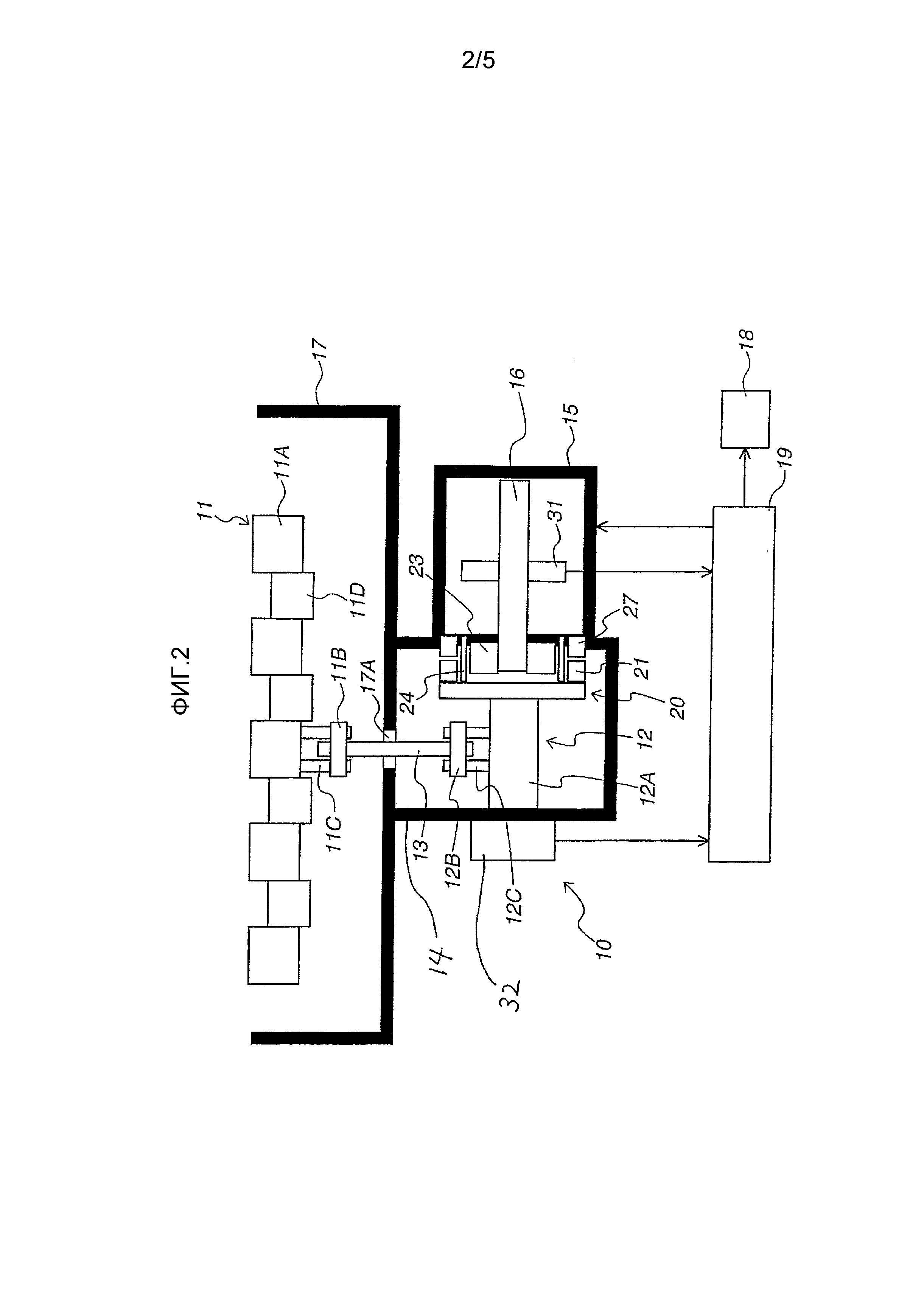
Фиг. 2 является видом соответствий в сечении, показывающим соединительную конструкцию между распределительным валом механизма регулирования степени сжатия и приводным электромотором.
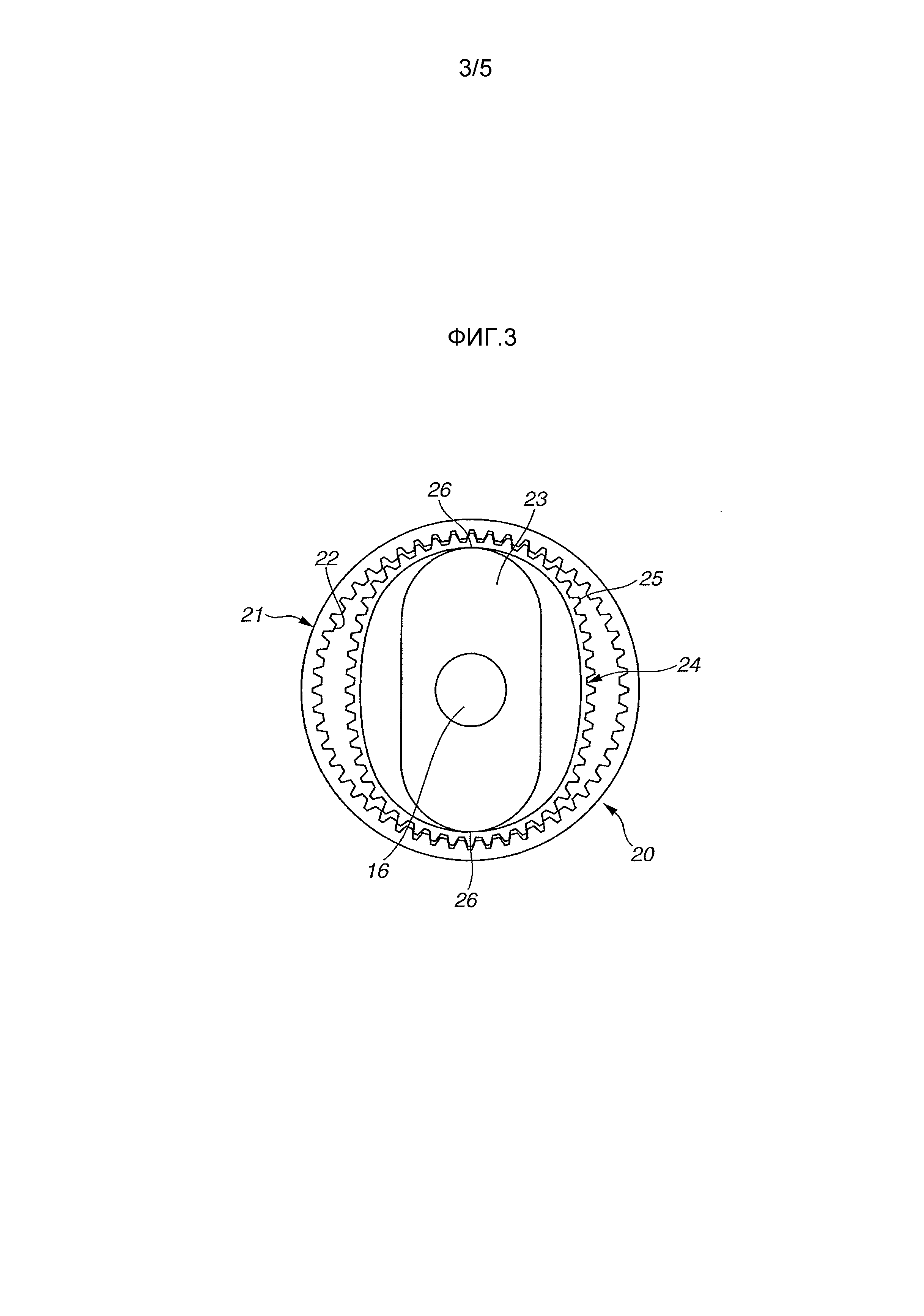
Фиг. 3 является видом для иллюстрации редуктора с зубчатой передачей на основе волнового движения в вышеуказанном варианте осуществления.
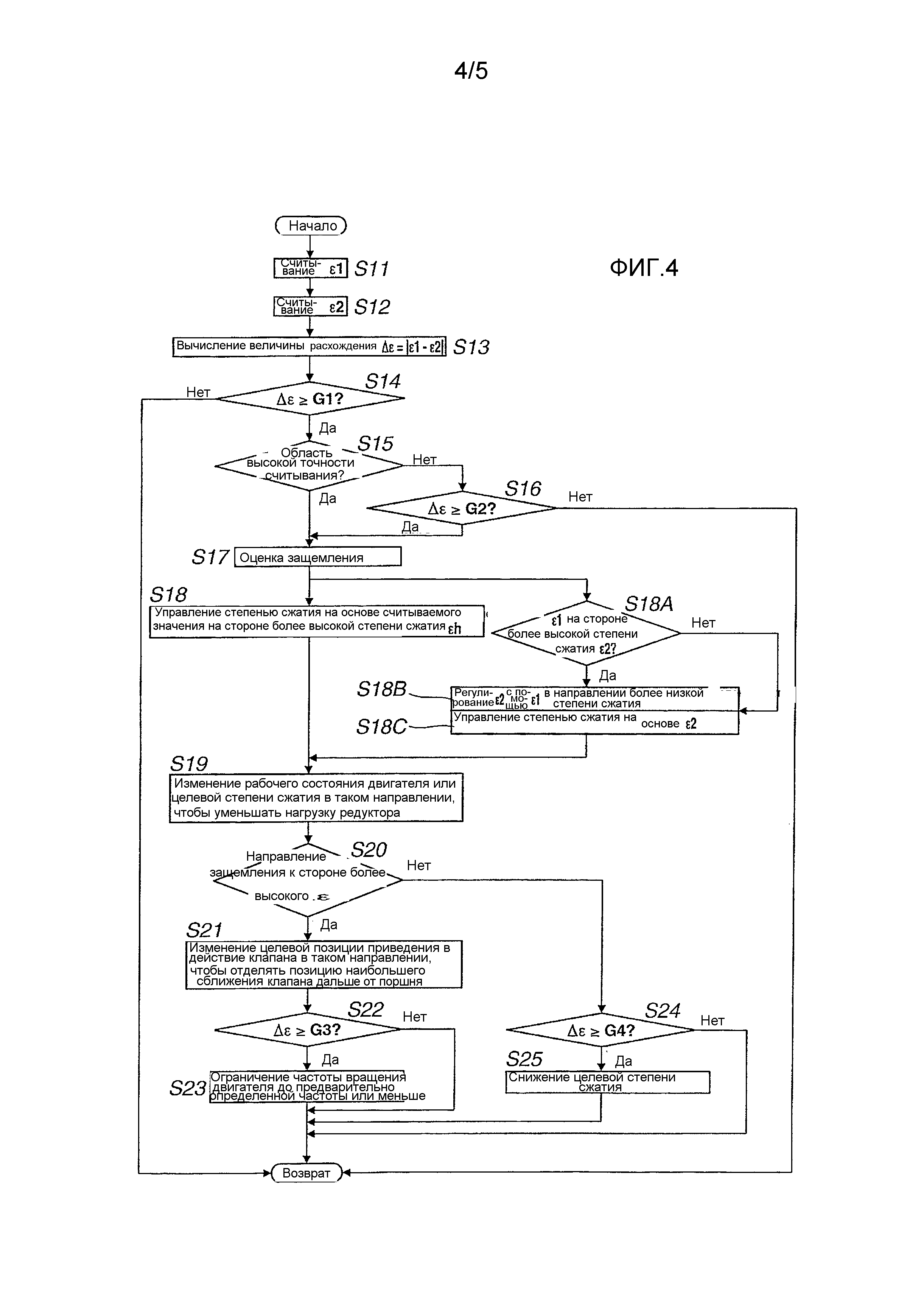
Фиг. 4 является блок-схемой последовательности операций способа, показывающей последовательность операций процесса управления, включающую в себя процесс оценки защемления вышеуказанного редуктора.
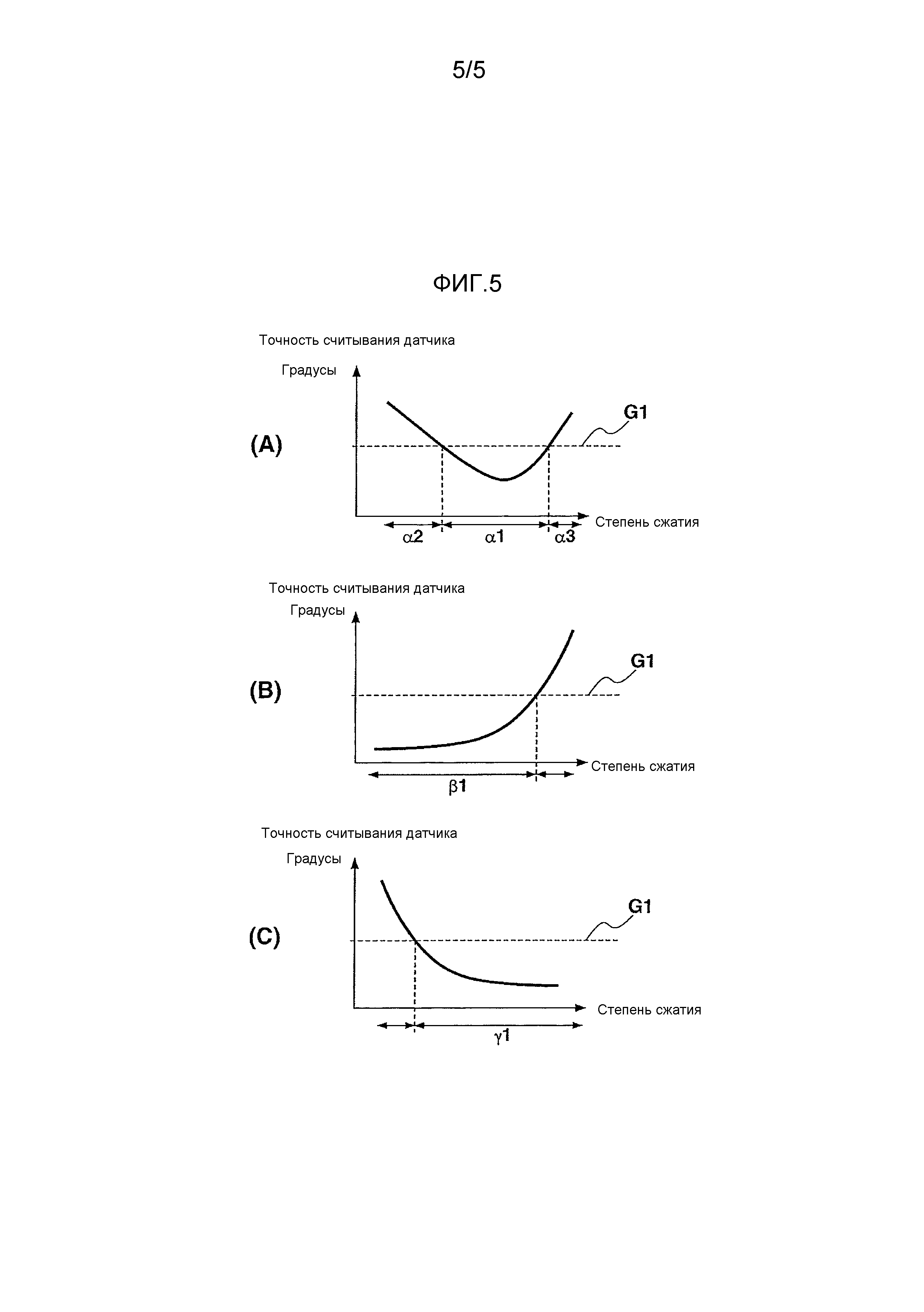
Фиг. 5 является видом для иллюстрации трех примеров (A)-(C) точности считывания датчика считывания угла поворота выходного вала.
ОПТИМАЛЬНЫЙ РЕЖИМ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
[0011] В дальнейшем в этом документе, настоящее изобретение поясняется посредством использования варианта(ов) осуществления, проиллюстрированного на чертежах. Фиг. 1 показывает механизм 1 регулирования степени сжатия или механизм варьирования степени сжатия в качестве приводимой секции приводного устройства. Этот механизм 1 регулирования степени сжатия известен по сути, как раскрыто на JP 2011-169152. Следовательно, нижеприведенное пояснение упрощено.
[0012] Этот механизм 1 регулирования степени сжатия включает в себя верхний шатун 3 и нижний шатун 5, присоединенные с возможностью вращения к пальцу 4A кривошипа коленчатого вала 4. Верхний конец верхнего шатуна 3 присоединяется с возможностью вращения через поршневой палец 2A к поршню 2, перемещаемому вверх и вниз в цилиндре блока цилиндров. Нижний шатун 5 соединен с возможностью вращения через соединительный палец 6 с нижним концом верхнего шатуна 3 и дополнительно соединен с возможностью вращения через управляющий палец 8 с верхним концевым фрагментом управляющей тяги 7.
[0013] Как показано на фиг. 1 и 2, приводной электромотор 15 (см. фиг. 2) в качестве секции приведения в действие выполнен с возможностью сдвигать позицию вращения распределительного вала 11 через соединительный механизм 10 и за счет этого сдвигать позицию нижнего конца управляющей тяги 7. Этот сдвиг позиции нижнего конца управляющей тяги 7 вызывает варьирование ориентации нижнего шатуна 5 и непрерывно варьирует степень сжатия двигателя. Соединительный механизм 10, соединяющий нижний конец управляющей тяги 7 и приводного электромотора 15, включает в себя распределительный вал 11, вспомогательный распределительный вал 12 и соединительную тягу 13, соединяющую валы 11 и 12.
[0014] Распределительный вал 11 идет параллельно коленчатому валу 4, в направлении ряда цилиндров, внутри двигателя. Распределительный вал 11 включает в себя первый фрагмент или фрагменты 11A шейки, поддерживаемые с возможностью вращения посредством элемента основного корпуса двигателя, такого как блок цилиндров, и множество эксцентриковых фрагментов 11D распределительного вала. Нижний конец управляющей тяги 7 каждого цилиндра присоединяется с возможностью вращения к одному из эксцентриковых фрагментов 11D распределительного вала. Эксцентриковые фрагменты 11D распределительного вала формируются в эксцентриковой позиции, эксцентриковой на предварительно определенную величину относительно первого фрагмента 11A шейки. Кроме того, передний конец первого плечевого фрагмента 11C, протягивающегося радиально из первого фрагмента 11A шейки, соединен с возможностью вращения с одним концом соединительной тяги 13 посредством первого соединительного пальца 11B.
[0015] Вспомогательный распределительный вал 12 включает в себя второй фрагмент 12A шейки, поддерживаемый с возможностью вращения посредством корпуса 14 (см. фиг. 2), и второй плечевой фрагмент 12C, протягивающийся радиально из второго фрагмента 12A шейки. Передний конец второго плечевого фрагмента 12C соединен с возможностью вращения с другим концом соединительной тяги 13 посредством второго соединительного пальца 12B. Приводной электромотор 15 в качестве секции приведения в действие соединяется с этим вспомогательным распределительным валом 12 через нижеупомянутый редуктор 20. Приводной электромотор 15 приводится в действие и управляется посредством секции 19 управления, сохраняющей и выполняющей различные операции управления.
[0016] Механизм 1 регулирования степени сжатия с использованием такого многорычажного поршневого кривошипно-шатунного механизма позволяет улучшать расход топлива и выходную мощность посредством регулирования степени сжатия двигателя надлежащим образом в соответствии с рабочим состоянием или режимом двигателя, и кроме того, регулировать характеристику хода поршня в требуемую форму, к примеру, как характеристику, близкую к простым гармоническим колебаниям, в отличие от однорычажного механизма, соединяющего поршень и коленчатый вал с одной тягой. Кроме того, по сравнению с однорычажным механизмом, можно задавать ход поршня большим относительно радиуса кривошипа, так что есть возможность уменьшать общую высоту двигателя и задавать степень сжатия выше. Кроме того, можно уменьшать или регулировать осевую нагрузку, действующую на поршень 2 и цилиндр, посредством регулирования угла наклона верхнего шатуна 3 и уменьшать вес поршня и цилиндра.
[0017] Кроме того, поскольку в проиллюстрированном примере, управляющая тяга 7 соединяется с нижним шатуном 5, приводной электромотор 15 и соединительный механизм 10, соединенные с управляющей тягой 7, могут располагаться в нижней области под углом ниже коленчатого вала 4, в которой относительно просто находить место, и, следовательно, эта компоновка является удобной для монтажа в двигателе. Тем не менее можно использовать компоновку, в которой управляющая тяга 7 соединяется с верхним шатуном 3. Кроме того, секция приведения в действие не ограничена приводным электромотором 15. Например, секция приведения в действие может представлять собой гидравлический актуатор с использованием нагнетательного масляного регулирующего клапана.
[0018] Редуктор 20 с зубчатой передачей на основе волнового движения размещается между вращательным валом 16 электромотора для приводного электромотора 15 и вспомогательным распределительным валом 12 соединительного механизма 10, как показано на фиг. 2 и 3. В этом практическом примере, вращательный вал 16 приводного электромотора 15 объединен как единое целое с входным валом редуктора 20, и вспомогательный распределительный вал 12 объединен как единое целое с выходным валом редуктора 20. Тем не менее, можно формировать эти валы в форме отдельных валов, а не объединенных.
[0019] Редуктор 20 располагается, вместе со вспомогательным распределительным валом 12, в корпусе 14. Приводной электромотор 15 присоединен к этому корпусу 14. Корпус 14 прикрепляется рядом с боковой стенкой 17 маслосборника, снаружи двигателя. Боковая стенка 17 маслосборника формируется с щелью 17A для вставки соединительной тяги 13.
[0020] Как показано на фиг. 3, редуктор 20 с зубчатой передачей на основе волнового движения включает в себя, в качестве основных частей: жесткое колесо 21 из жесткого тела, сформированное с зубьями 22 с внутренним зацеплением во внутренней окружности жесткого колеса 21; генератор 23 волн, расположенный коаксиально в жестком колесе 21; и гибкое колесо (шестерню) 24, расположенное коаксиально между генератором 23 волн и жестким колесом 21. Гибкое колесо 24 выполнено с возможностью упругой деформации в эллиптическую форму посредством генератора 23 волн. Гибкое колесо 24 формируется с зубьями 25 с внешним зацеплением в наружной окружности гибкого колеса 24. Зубья 25 с внешним зацеплением гибкого колеса 24 зацепляются с зубьями 22 с внутренним зацеплением жесткого колеса 21 в двух позициях 26 в направлении главной оси эллиптической формы.
[0021] Генератор 23 волн имеет эллиптическую форму. Генератор 23 волн прикрепляется, в центральном фрагменте, к вращательному валу 16 приводного электромотора 15 и выполнен с возможностью вращаться в качестве единого блока с вращательным валом 16. Гибкое колесо 24 изготовлено из металлического материала, имеющего такую гибкость, чтобы отклоняться радиально в соответствии с эллиптическим валом генератора 23 волн. Предусмотрен шариковый подшипник (исключен на чертеже) на радиальной внутренней стороне гибкого колеса 24, и гибкое колесо 24 допускает вращение относительно генератора 23 волн.
[0022] Число зубьев 22 с внутренним зацеплением и число зубьев 25 с внешним зацеплением отличаются друг от друга, и разность числа зубьев между ними задается равной двум зубьям. Когда генератор 23 волн вращается на один оборот, жесткое колесо 21 и гибкое колесо 24 вращаются относительно друг друга на величину, соответствующую разности числа зубьев между ними.
[0023] Редуктор 20 этого варианта осуществления использует конструкцию кольцевого типа с использованием вспомогательного жесткого колеса 27 для того, чтобы извлекать выходную мощность из жесткого колеса 21. Это вспомогательное жесткое колесо 27 располагается рядом с жестким колесом 21 в осевом направлении и прикрепляется к корпусу 14. Вспомогательное жесткое колесо 27 также включает в себя зубья с внутренним зацеплением, сформированные во внутренней окружности. Тем не менее, число зубьев с внутренним зацеплением вспомогательного жесткого колеса 27 равно числу зубьев 25 с внешним зацеплением гибкого колеса 24. Иными словами, вспомогательное жесткое колесо 27 выступает в качестве вида зубчатой муфты, и жесткое колесо 21 вращается на величину разности числа зубьев в ответ на один оборот генератора 23 волн.
[0024] Конструкция редуктора 20 не ограничена конструкцией вышеуказанного варианта осуществления. Можно использовать чашеобразную конструкцию, в которой жесткое колесо 21 прикрепляется к корпусу 14, и выходная мощность извлекается из гибкого колеса 24 в форме чашки.
[0025] Редуктор 20 с зубчатой передачей на основе волнового движения с такой конструкцией имеет преимущества меньшего числа требуемых частей, меньшего размера и небольшого веса, и при этом данный редуктор 20 позволяет предоставлять очень большое передаточное число. Кроме того, поскольку люфт не требуется, эффективность зацепления является высокой, и управляемость и надежность являются высокими. С другой стороны, редуктор 20 с зубчатой передачей на основе волнового движения может подвергаться явлению, называемому "защемлением", которое представляет собой проскальзывание или сдвиг позиции либо позиций зацепления или ввода в зацепление зубьев 22 с внутренним зацеплением и зубьев 25 с внешним зацеплением редуктора 20. Следовательно, если система выполнена с возможностью считывать только позицию вращения вращательного вала 16 приводного электромотора 15 (входного вала редуктора), управлять приводным электромотором 15, например, система неспособна определять возникновение защемления, и, следовательно, подвержена отклонению между считываемым значением или считываемой величиной и фактической степенью сжатия, соответствующей фактической позиции вращения.
[0026] Отклонение между считываемой величиной и фактической степенью сжатия вызывает следующие проблемы. Когда, например, фактическая степень сжатия отклоняется от считываемой величины к стороне более низкой степени сжатия, это отклонение может вызывать такие недостатки, как ухудшение характеристик касательно расхода топлива и выходной мощности, снижение износостойкости выпускных частей вследствие возрастания температуры смеси выхлопных газов и ухудшение характеристик катализатора. В случае отклонения фактической степени сжатия от считываемой величины к стороне более высокой степени сжатия, отклонение может вызывать чрезмерное сближение между впускным или выпускным клапаном и поршнем и детонацию.
[0027] Кроме того, в случае управления около наибольшей степени сжатия или наименьшей степени сжатия, на которую накладывается механическое ограничение с помощью ограничителя, позиция вращения распределительного вала 11 может достигать позиции ограничителя для наибольшей или наименьшей степени сжатия до того, как считываемая величина или степень сжатия достигнет целевой степени сжатия, и, следовательно, система управления может быть неспособна управлять степенью сжатия до целевой степени сжатия, приводя к ошибке управления.
[0028] Кроме того, если в состоянии неспособности определять защемление, проскальзывание или сдвиг позиции зацепления увеличивается посредством защемления до значения, большего или равного предварительно определенному уровню, передние кончики зубьев 22 с внутренним зацеплением и зубьев 25 с внешним зацеплением могут стираться, и износ может понижать крутящий момент формирования защемления, в силу этого вызывать резкое и большое отклонение степени сжатия вследствие приложения большого крутящего момента и усугублять вышеуказанные проблемы.
[0029] Кроме того, износ или абразивный порошок вершин зубьев может увеличивать трение за счет заклинивания в поверхностях зубьев и шариковом подшипнике и ухудшать чувствительность.
[0030] Следовательно, в этом практическом примере, как пояснено ниже, вышеуказанные проблемы не допускаются посредством точной оценки или определения возникновения защемления. В частности, предусмотрены датчик 31 считывания угла поворота входного вала для того, чтобы считывать позицию вращения вращательного вала 16 электромотора, который представляет собой входной вал редуктора 20, и датчик 32 считывания угла поворота выходного вала для того, чтобы считывать позицию вращения вспомогательного распределительного вала 12, который представляет собой выходной вал редуктора 20. Возникновение защемления оценивается или определяется посредством использования считываемых величин или считываемых значений датчиков 31 и 32.
[0031] Фиг. 4 является блок-схемой последовательности операций способа, показывающей последовательность операций управления, включающую в себя такой процесс для оценки защемления. Эта процедура сохраняется в вышеуказанной секции 19 управления и выполняется многократно через регулярные временные интервалы (например, 10 мс).
[0032] На этапе S11, секция управления считывает первую считываемую величину или значение ε1, соответствующее фактической степени сжатия, считываемой посредством датчика 31 считывания угла поворота входного вала. На этапе S12, секция управления считывает вторую считываемую величину или значение ε2, соответствующее фактической степени сжатия, считываемой посредством датчика 32 считывания угла поворота выходного вала. На этапе S13, секция управления вычисляет величину Δε расхождения, которая равна абсолютному значению |ε1-ε2| разности между первой считываемой величиной ε1 и второй считываемой величиной ε2.
[0033] На этапе S14, секция управления определяет то, превышает или равна либо нет величина Δε расхождения первому предварительно определенному значению G1, соответствующему проскальзыванию или перемещению позиции(й) зацепления или ввода в зацепление зубьев 22 с внутренним зацеплением и зубьев 25 с внешним зацеплением на величину одного зуба. Секция управления переходит к этапу S15, когда величина Δε расхождения превышает или равна первому предварительно определенному значению G1. Когда величина Δε расхождения меньше первого предварительно определенного значения G1, секция управления оценивает то, что защемление не присутствует, и завершает эту процедуру.
[0034] На этапе S15, секция управления определяет то, находится или нет рабочая точка в области высокой точности считывания, в которой проскальзывание или перемещение на один зуб позиции зацепления является определимым. Эта оценка выполняется, например, посредством использования первой считываемой величины ε1 или второй считываемой величины ε2. В случае области высокой точности считывания, секция управления переходит к этапу S17, пропуская этап S16, и оценивает или определяет, на S17, возникновение защемления.
[0035] С другой стороны, когда рабочая точка не находится в области высокой точности считывания, секция управления переходит к этапу S16 и определяет то, превышает или равна либо нет величина Δε расхождения второму предварительно определенному значению G2, соответствующему проскальзыванию или перемещению позиции(й) зацепления или ввода в зацепление зубьев 22 с внутренним зацеплением и зубьев 25 с внешним зацеплением, на величину множества зубьев (например, на два зуба). Второе предварительно определенное значение G2 составляет значение, превышающее первое предварительно определенное значение G1. Когда величина Δε расхождения превышает или равна второму предварительно определенному значению G2, секция управления переходит к вышеуказанному этапу S17 и оценивает то, что защемление присутствует. Когда величина Δε расхождения меньше второго предварительно определенного значения G2, секция управления оценивает то, что защемление не присутствует, и завершает эту процедуру.
[0036] В случае оценки возникновения защемления, секция управления переходит от этапа S17 к этапу S18. На этапе S18, секция управления выбирает считываемую величину εh, используемую для управления приведением в действие приводного электромотора 15 и т.п., из первой и второй считываемых величин. Считываемая величина εh является одной из первой считываемой величины ε1 и второй считываемой величины ε2, и считываемая величина εh имеет значение на стороне высокой степени сжатия относительно значения другой из первой считываемой величины εε1 и второй считываемой величины ε2. Секция 19 управления определяет целевую степень сжатия на основе такой выбранной считываемой величины εh и управляет состоянием приведения в действие приводного электромотора 15.
[0037] Можно выполнять операции этапов S18A-S18C, вместо операции этапа S18. На этапах S18A-S18C, одна из считываемых величин выбирается предварительно в качестве выбранной считываемой величины, используемой для управления приведением в действие приводного электромотора 15 и т.п. (в этом примере, предварительно выбранная считываемая величина является второй считываемой величиной ε2 на стороне выходного вала, выше по точности управления). В частности, на этапе S18A, секция управления определяет то, имеет или нет первая считываемая величина ε1 на стороне входного вала, не используемая для управления, значение более высокой степени сжатия по сравнению со второй считываемой величиной ε2 на стороне выходного вала, используемой для управления. Когда значение первой считываемой величины ε1 не составляет значение более высокой степени сжатия по сравнению со второй считываемой величиной ε2, т.е. первая считываемая величина ε1 равна значению более низкой степени сжатия по сравнению со второй считываемой величиной ε2, секция управления пропускает этап S18B и переходит к нижеупомянутому этапу S18C.
[0038] Когда первая считываемая величина ε1 равна значению на стороне более высокой степени сжатия второй считываемой величины ε2, секция управления переходит к этапу S18B и модифицирует вторую считываемую величину ε2, которая должна использоваться для управления в направлении более низкой степени сжатия, в соответствии с первой считываемой величиной ε1, которая не должна использоваться для управления (в соответствии с величиной Δε расхождения между обеими считываемыми величинами, если быть точным). Затем секция управления переходит к этапу S18C. На этапе S18C, секция управления выполняет управление степенью сжатия на основе более точной второй считываемой величины ε2 на стороне выходного вала. Таким образом, секция 19 управления определяет целевую степень сжатия на основе считываемой величины ε2 и управляет состоянием приведения в действие приводного электромотора 15.
[0039] На этапе S19, секция управления регулирует или варьирует рабочее состояние двигателя, такое как частота вращения двигателя или запрашиваемая нагрузка либо задание целевой степени сжатия в таком направлении, чтобы уменьшать нагрузку редуктора 20.
[0040] На этапе S20, секция управления определяет направление защемления, т.е. то, представляет собой или нет направление проскальзывания или перемещения позиции(й) зацепления к стороне более высокой степени сжатия.
[0041] Когда направление защемления представляет собой направление к стороне более высокой степени сжатия, секция управления переходит к этапу S21 и регулирует целевое значение рабочей характеристики впускного или выпускного клапана посредством приводного механизма 18 регулируемого клапана (см. фиг. 2) в таком направлении, чтобы увеличивать расстояние наибольшего сближения между поршнем 2 и впускным или выпускным клапаном, к которому применяется приводной механизм 18 регулируемого клапана. В качестве приводного механизма 18 регулируемого клапана, можно использовать известный механизм, такой как механизм управления фазами газораспределения (VTC), варьирующий как время открытия клапана, так и время закрытия клапана для впускного или выпускного клапана одновременно и непрерывно, либо механизм варьирования подъема и рабочего угла (VEL), варьирующий рабочий угол клапана и подъем клапана для впускного или выпускного клапана одновременно и непрерывно.
[0042] На следующем этапе S22, секция управления определяет то, превышает или равна либо нет величина Δε расхождения третьему предварительно определенному значению G3 или нет. Когда величина Δε расхождения меньше третьего предварительно определенного значения G3, то секция управления завершает эту процедуру. Когда величина Δε расхождения превышает или равна третьему предварительно определенному значению G3, секция управления переходит к этапу S23 и ограничивает частоту вращения двигателя значением, ниже или равным предварительно определенной частоте вращения.
[0043] Когда оценка этапа S20 состоит в том, что направление защемления задано не к стороне более высокой степени сжатия, а к стороне более низкой степени сжатия, секция управления переходит к этапу S24 и определяет то, превышает или равна либо нет величина Δε расхождения четвертому предварительно определенному значению G4. Четвертое предварительно определенное значение G4 может задаваться равным третьему предварительно определенному значению G3 для упрощения либо может задаваться равным значению, отличающемуся от третьего предварительно определенного значения G3, для адаптации или регулирования. Когда величина Δε расхождения меньше четвертого предварительно определенного значения G4, то секция управления завершает эту процедуру. Когда величина Δε расхождения превышает или равна четвертому предварительно определенному значению G4, секция управления переходит к этапу S25 и регулирует целевую степень сжатия к стороне более низкой степени сжатия.
[0044] Ниже поясняются конструктивные признаки и преимущества этого варианта осуществления.
[0045] [1] Редуктор 20 располагается между приводным электромотором 15, служащим в качестве секции приведения в действие, и механизмом 1 регулирования степени сжатия или механизмом варьирования степени сжатия, служащим в качестве приводимой секции, приводимой в действие посредством приводного электромотора 15. Этот редуктор 20 передает вращение из вращательного вала приводного электромотора 15 (входного вала редуктора) на пониженной частоте на вспомогательный распределительный вал 12 (выходной вал редуктора).
[0046] Этот редуктор 20 представляет собой так называемый редуктор с зубчатой передачей на основе волнового движения или редуктор с напряженной волновой зубчатой передачей, включающий в себя жесткое колесо 21, гибкое колесо (шестерню) 24 и генератор 23 волн, которые располагаются на одной оси. Относительно одного оборота генератора 23 волн жесткое колесо 21 и гибкое колесо 24 вращаются относительно друг друга на величину, соответствующую разности числа зубьев, которая представляет собой разность между числом зубьев 22 с внутренним зацеплением жесткого колеса 21 и числом зубьев 25 с внешним зацеплением гибкого колеса 24.
[0047] Кроме того, в этом варианте осуществления, предусмотрены датчик 31 считывания угла поворота входного вала, служащий в качестве секции считывания угла поворота входного вала для того, чтобы считывать позицию вращения входного вала редуктора 20 (вращательного вала 16 электромотора), и датчик 32 считывания угла поворота выходного вала, служащий в качестве секции считывания угла поворота выходного вала для того, чтобы считывать позицию вращения выходного вала (вспомогательного распределительного вала 12) редуктора 20. Устройство этого варианта осуществления оценивает или определяет возникновение защемления, обозначающего проскальзывание или сдвиг позиции или позиций зацепления между зубьями 22 с внутренним зацеплением и зубьями 25 с внешним зацеплением, когда величина Δε расхождения между считываемыми величинами или считываемыми позициями вращения обоих датчиков превышает или равна предварительно определенному значению.
[0048] Посредством считывания позиций вращения входного вала и выходного вала редуктора по отдельности таким способом, устройство этого варианта осуществления позволяет точно оценивать или определять возникновение защемления из величины Δε расхождения. Следовательно, устройство этого варианта осуществления позволяет эффективно сдерживать или не допускать уменьшения точности управления при управлении степенью сжатия и ухудшения функциональности или общей характеристики управляемости вследствие защемления.
[0049] [2] В качестве датчика 32 считывания угла поворота выходного вала устройство использует датчик, имеющий точность, допускающую считывание проскальзывания предварительно определенного числа зубьев позиции(й) зацепления между зубьями 22 с внутренним зацеплением и зубьями 25 с внешним зацеплением редуктора 20 в предварительно определенной области высокой точности считывания. Например, устройство использует датчик, имеющий точность, допускающую считывание проскальзывания на величину, соответствующую одному зубу. Когда, например, число зубьев равно 320, и передаточное число равно 160, устройство использует датчик абсолютного угла поворота, допускающий считывание или определение проскальзывания на величину, приблизительно равную одному градусу, соответствующую проскальзыванию или перемещению одного зуба в предварительно определенной области высокой точности считывания.
[0050] Следовательно, в области α1 высокой точности считывания, как показано на фиг. 5(A) в качестве примера, устройство может определять возникновение защемления одного зуба (этапы S14, S15 и S17) и исключать необходимость высокой точности считывания во всей области. Соответственно, можно использовать недорогой датчик небольшого размера, имеющий точность считывания, снижающуюся в части областей угла, когда ширина угла считывания увеличивается, и, следовательно, уменьшать размер датчика и снижать стоимость.
[0051] [3] Как показано на фиг. 5A, в качестве примера, устройство допускает оценку возникновения защемления, когда величина Δε расхождения считываемых величин превышает или равна первому предварительно определенному значению G1, соответствующему проскальзыванию на величину, равную или большую одного зуба между зубьями с внутренним зацеплением и зубьями с внешним зацеплением, в области α1 высокой точности считывания (этапы S14, S15, S17). Даже защемление одного зуба может вызывать некорректное или ненадлежащее состояние зацепления, например, увеличивающее трение в редукторе 20, ухудшающее чувствительность при управлении варьированием степени сжатия и вызывающее вероятность возникновения детонации в случае ускорения в состоянии высокой степени сжатия. В силу способности к определению проскальзывания или сдвига на один зуб, устройство может сдерживать или не допускать возникновения такой детонации.
[0052] [4] В области или областях α2, α3, отличных от области α1 высокой точности считывания, устройство оценивает возникновение защемления, когда величина Δε расхождения считываемых величин превышает или равна второму предварительно определенному значению G2, соответствующему проскальзыванию на число зубьев, превышающее предварительно определенного число зубьев, к примеру, проскальзыванию на два или более зубьев (S15, S16, S17). Следовательно, устройство может оценивать защемление двух или более зубьев точно даже в области, в которой точность считывания является более низкой.
[0053] [5] Когда образуется защемление, устройство уменьшает крутящий момент нагрузки редуктора 20 (S19). Посредством уменьшения крутящего момента нагрузки редуктора 20 устройство может сдерживать или не допускать продолжения защемления.
[0054] [6] В этом варианте осуществления, механизм 1 регулирования степени сжатия используется в качестве примера приводимой секции. В приводном устройстве механизма 1 регулирования степени сжатия приводной электромотор 15 секции приведения в действие многократно принимает нагрузку по сгоранию и инерционную нагрузку каждый интервал сгорания, так что использование редуктора 20 с зубчатой передачей на основе волнового движения, предоставляющего большое передаточное число, является очень эффективным. Этот приводной электромотор 15 управляется посредством секции 19 управления. Секция 19 управления задает целевую степень сжатия в соответствии с рабочим состоянием двигателя, таким как частота вращения двигателя и/или требуемая нагрузка, и управляет приводным электромотором 15 в соответствии с такой заданной целевой степенью сжатия.
[0055] [7] Фиг. 5 показывает точность считывания (минимальный угол, который может определяться) датчика 32 вращения выходного вала, с точки зрения величины, которая становится более низкой по мере того, как точность считывания становится более высокой. Датчик в примере, показанном на фиг. 5(A), имеет точность, допускающую считывание проскальзывания на один зуб для зубьев с внутренним и внешним зацеплением редуктора только в предварительно определенной области α1 средней степени сжатия. Другими словами, область α1 средней степени сжатия задается в качестве области высокой точности считывания, допускающей считывание проскальзывания на один зуб, и датчик имеет точность, допускающую считывание значения, ниже первого предварительно определенного значения G1, соответствующего проскальзыванию на один зуб. В этом случае, устройство может надежно определять защемление в виде проскальзывания на один зуб в состоянии средней степени сжатия, в котором прикладывается наибольший крутящий момент нагрузки.
[0056] [8] Датчик в примере, показанном на фиг. 5(B), имеет точность, допускающую считывание проскальзывания на один зуб только в предварительно определенной области β1 низкой или более низкой степени сжатия, включающей в себя наименьшую степень сжатия. В этой области β1 низкой степени сжатия, приводной электромотор 15 может сталкиваться с ограничителем на высокой частоте вращения с помощью давления в цилиндрах. Устройство может сдерживать или не допускать такого столкновения посредством считывания защемления проскальзывания на один зуб.
[0057] [9] Датчик в примере, показанном на фиг. 5(C), имеет точность, допускающую считывание проскальзывания на один зуб только в предварительно определенной области γ1 высокой или более высокой степени сжатия, включающей в себя наибольшую степень сжатия. В области высокой степени сжатия, крутящий момент нагрузки редуктора увеличивается в случае столкновения с ограничителем посредством приведения в действие в направлении высокой степени сжатия посредством приводного электромотора 15. Устройство может сдерживать или не допускать такого увеличения крутящего момента нагрузки редуктора посредством считывания защемления проскальзывания на один зуб.
[0058] [10] Альтернативно, можно использовать конструкцию, имеющую точность, допускающую считывание проскальзывания на один зуб в двух или более из вышеуказанной области средней степени сжатия, области низкой степени сжатия, включающей в себя наименьшую степень сжатия, и области высокой степени сжатия, включающей в себя наибольшую степень сжатия.
[0059] [11] Когда образуется защемление, и величина Δε расхождения превышает или равна четвертому предварительно определенному значению G4, целевая степень сжатия регулируется до более низкой степени сжатия (этапы S17, S24, S25). При этой конфигурации, несмотря на вероятность анормального увеличения фактической степени сжатия вследствие защемления, когда первая считываемая величина ε1 на стороне входного вала меньше второй считываемой величины ε2 на стороне выходного вала, устройство может не допускать чрезмерного сближения между клапаном и поршнем посредством уменьшения целевой степени сжатия. Когда первая считываемая величина ε1 на стороне входного вала превышает вторую считываемую величину ε2 на стороне выходного вала, фактическая степень сжатия может снижаться анормально посредством защемления. Следовательно, посредством уменьшения целевой степени сжатия, устройство может уменьшать крутящий момент нагрузки, прикладываемый к редуктору 20, и за счет этого сдерживать или не допускать дополнительного возникновения защемления.
[0060] [12] Во время возникновения защемления целевая степень сжатия задается (этап S18) посредством использования более высокой степени сжатия, представляющей считываемую величину εh, которая является одной из первой считываемой величины ε1 на стороне входного вала и второй считываемой величины ε2 на стороне выходного вала и которая представляет относительно высокую степень сжатия по сравнению с другой из первой и второй считываемых величин. Когда существует расхождение или разность между двумя считываемыми величинами, невозможно оценивать то, какая из них является надлежащей. Соответственно, устройство может сдерживать чрезмерный сдвиг к стороне высокого сжатия и сдерживать чрезмерное сближение между клапаном и поршнем посредством задания целевой степени сжатия посредством использования считываемой величины εh на стороне более высокой степени сжатия.
[0061] [13] Устройство может быть выполнено с возможностью управлять приводным электромотором 15 посредством использования любой из двух считываемых величин во время возникновения защемления. Например, на этапе S18C, устройство выполнено с возможностью управлять состоянием приведения в действие приводного электромотора в соответствии со второй считываемой величиной ε2 на более точной стороне выходного вала. В этом случае, если первая считываемая величина ε1, не используемая для управления, предполагает значение, представляющее более высокую степень сжатия по сравнению со второй считываемой величиной ε2, устройство модифицирует или регулирует вторую считываемую величину ε2 к стороне более низкой степени сжатия (S18A, S18B) в соответствии с величиной Δε расхождения считываемых величин.
[0062] Когда вторая считываемая величина ε2, используемая для управления электромотором, предполагает значение на стороне более низкой степени сжатия по сравнению с первой считываемой величиной ε1, не используемой для управления, устройство рассматривает, что правильное или надлежащее значение является первой считываемой величиной ε1, имеющей значение более высокой степени сжатия на безопасной стороне, чтобы не допускать чрезмерного сближения клапана и поршня, и модифицирует вторую считываемую величину ε2, которая должна использоваться для управления электромотором, к стороне более низкой степени сжатия. В этой модификации, устройство позволяет не допускать чрезмерного сближения между клапаном и поршнем, предоставлять непрерывное использование датчика 32 считывания угла поворота выходного вала, имеющего большую точность, в качестве датчика, используемого для управления электромотором, и поддерживать точное управление степенью сжатия.
[0063] [14] Устройство регулирует целевое значение рабочей характеристики приводного механизма 18 регулируемого клапана (этап S21) таким образом, чтобы увеличивать расстояние наибольшего сближения между поршнем и впускным или выпускным клапаном, если направление защемления задано к стороне более высокой степени сжатия. За счет такого регулирования, устройство может надежно предотвращать чрезмерное снижение расстояния наибольшего сближения между клапаном и поршнем в силу становления степени сжатия более высокой посредством защемления.
[0064] [15] Устройство ограничивает частоту вращения двигателя диапазоном, равным или ниже предварительно определенной частоты, когда направление защемления задано к стороне более высокой степени сжатия, и одновременно величина Δε расхождения превышает или равна третьему предварительно определенному значению G3 (этапы S20, S22, S23). Посредством такого ограничения частоты вращения двигателя, устройство может сдерживать варьирование направления к стороне более высокой степени сжатия посредством силы инерции и надежно предотвращать становление степени сжатия чрезмерно высокой.
[0065] [16] Можно использовать компоновку, не показанную на чертежах, в которой датчик 32 считывания угла поворота выходного вала в качестве секции считывания угла поворота выходного вала располагается со стороны или рядом с распределительным валом 11, и датчик 31 считывания угла поворота входного вала в качестве секции считывания вращения входного вала располагается между вспомогательным распределительным валом 12 и приводным электромотором 15.
[0066] В этом случае, с помощью характеристики передаточного числа степени сжатия, предоставленной посредством соединительного механизма 10, включающего в себя соединительную тягу 13 и другие элементы, можно задавать область высокой точности считывания в произвольной области степени сжатия, как показано на фиг. 5(A)-5(C). Соответственно, можно задавать область высокой точности считывания самого датчика в области степени сжатия защемления, требующей определения, и задавать область относительно меньшей точности считывания в другой области или областях степени сжатия.
[0067] Хотя изобретение описано выше в отношении определенного варианта осуществления или вариантов осуществления изобретения, изобретение не ограничено вариантом(ами) осуществления, описанными выше. Различные модификации и варьирования находятся в пределах объема настоящего изобретения. Например, в вышеуказанном варианте осуществления, приводимая секция включает в себя механизм регулирования степени сжатия. Тем не менее, настоящее изобретение также является применимым к приводному устройству, включающему в себя приводимую секцию с использованием другого механизма или приводимого модуля, такого как приводной механизм регулируемого клапана.
Система топливного элемента и способ ее контроля
Электропроводный узел и топливный элемент с полимерным электролитом с его использованием
Преобразователь электрической мощности
Элемент аккумуляторной батареи и устройство мониторинга для батареи в сборе
Катализатор нейтрализации отработанных газов и способ его получения
Катализатор для очистки отработавших газов и способ его производства
Водоотталкивающая пленка и деталь для транспортного средства, включающая пленку
Конструкция для установки запасной шины
Токосъемник для вторичной батареи и вторичная батарея с его использованием
Устройство управления генерированием энергии и способ управления генерированием энергии для топливного элемента
Система топливного элемента и способ ее контроля
Электропроводный узел и топливный элемент с полимерным электролитом с его использованием
Преобразователь электрической мощности
Элемент аккумуляторной батареи и устройство мониторинга для батареи в сборе
Катализатор нейтрализации отработанных газов и способ его получения
Катализатор для очистки отработавших газов и способ его производства
Водоотталкивающая пленка и деталь для транспортного средства, включающая пленку
Конструкция для установки запасной шины
Токосъемник для вторичной батареи и вторичная батарея с его использованием
Устройство управления генерированием энергии и способ управления генерированием энергии для топливного элемента

