Результат интеллектуальной деятельности: СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ
Вид РИД
Изобретение
Изобретение относится к области радиосвязи и навигации, и может быть использовано для организации систем определения местоположения подвижных объектов.
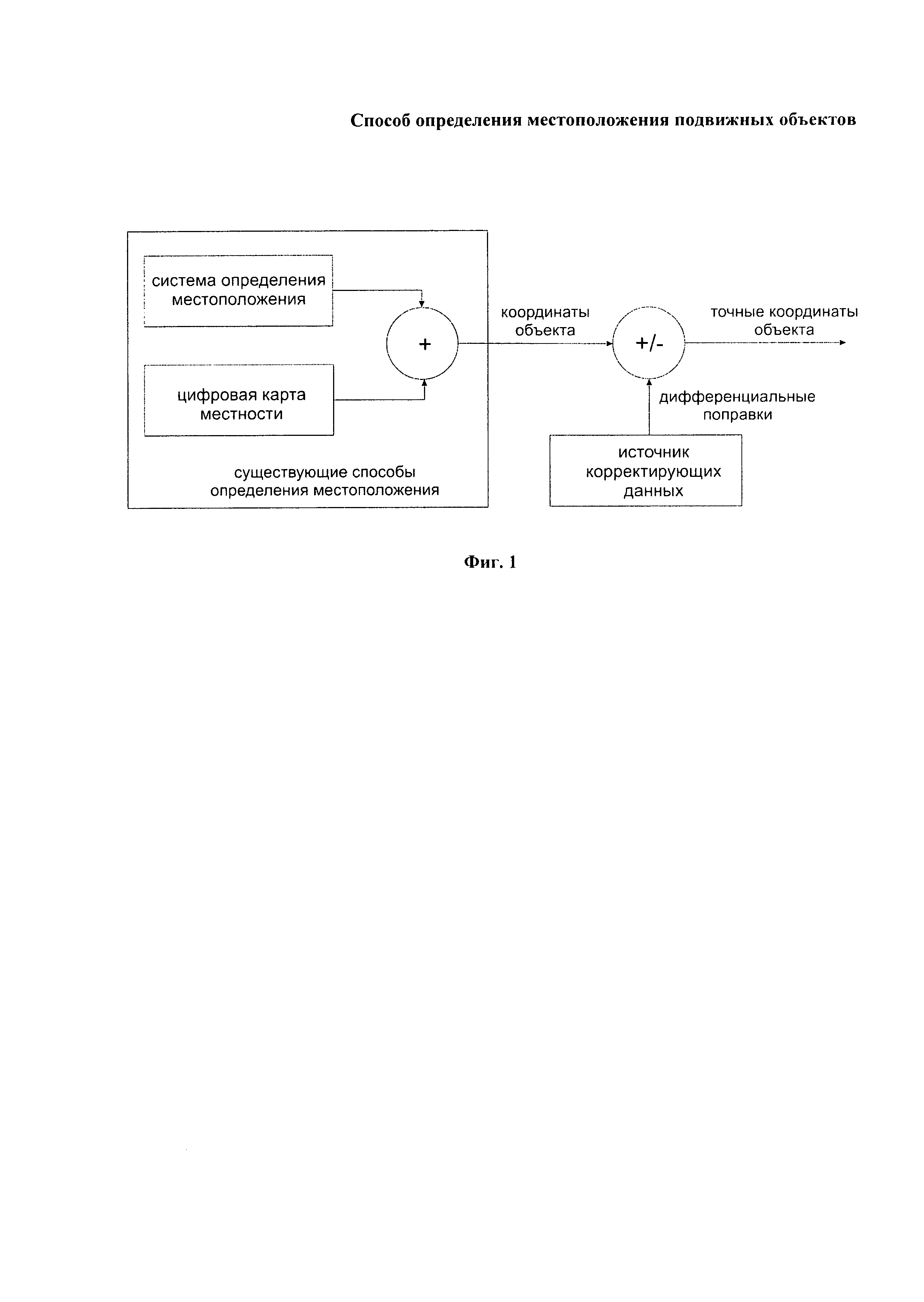
Известен способ определения местоположения объектов с использованием спутниковых систем навигации (GPS, GLONASS, GALILEO и др.). В основе способа лежит использование вычислений текущих координат объекта по принимаемым в данный момент времени сигналам спутниковых систем навигации и нанесение вычисленных координат на цифровую карту местности. При распространении сигналов спутниковых систем навигации в пространстве происходят их искажения, что влечет за собой ошибку определения местоположения объектов, которая не постоянна во времени. Для уменьшения ошибки определения местоположения используют вспомогательные данные от референсных приемников - источников корректирующей информации [1], расположенных стационарно и распространяющих дифференциальные поправки, получаемые подвижной станцией по различным сетям радиосвязи, например, сетям подвижной связи. Полученные вспомогательные данные обрабатывают совместно с поступающей от спутниковых систем навигации сигналами, что приводит к существенному увеличению точности определения местоположения.
Известны наиболее распространенные способы определения местоположения в сетях связи GSM/UMTS, выполняемые дополнительным оборудованием сетей связи [2].
Способ определения местоположения на основе вычисления времени распространения сигнала по восходящей линии (ТоА), основан на генерации подвижной станцией специального измерительного сигнала, представляющего собой пакеты доступа, генерируемые подвижной станцией при выполнении процедуры хендовера, которые принимаются измерительными модулями, установленными на базовых станциях сети подвижной связи. Центр определения местоположения сети подвижной связи вычисляет задержку распространения сигналов от подвижной станции не менее чем до трех синхронизированных измерительных модулей, которые могут как интегрироваться в базовые станции, так и устанавливаться отдельно, и, используя зависимость времени распространения сигнала от расстояния, производить определение местоположения.
При реализации угломерного метода (метод направления прихода сигналов - Angle of Arrival - АоА) измеряемыми параметрами являются углы направления прихода излучения подвижной станции относительно линии, соединяющей две сотовые станции сети. Для определения направления прихода сигналов подвижных станций используются фазированные антенные решетки, устанавливаемые на базовых станциях сети и подключаемые к существующему оборудованию системы связи. Нахождение местоположения абонента осуществляется при приеме сигналов его подвижной стации хотя бы двумя приемниками. В случае если сигнал получен только одним приемником, для определения местоположения может использоваться дополнительная информация на основе оценки амплитуды сигнала.
Способ измерения разности времени приема сигналов (OTDoA), заключается в том, что подвижная станция использует информацию о наблюдаемой разности времени приема сигналов от нескольких базовых станций. При синхронизации подвижной и базовой станции, подвижная станция производит измерения относительного времени приема сигналов от различных базовых станций. В случае отсутствия синхронизации, сигналы дополнительно принимаются измерительным модулем с известными координатами. Определение местоположения производится путем вычисления геометрической составляющей задержки между временем приема указанных сигналов.
Усовершенствованный способ измерения разности времени приема сигналов (Е-OTD), предназначенный для применения в современных сетях связи третьего поколения UMTS, заключается в том, что основной измеряемой величиной является задержка между двумя системными кадрами, получаемая от двух различных базовых станций сети UMTS в общем пилотном канале, используемом для синхронизации оборудования абонента и базовой станции, вспомогательными данными является время полного прохождения сигнала на участке базовая станция - подвижная станция при их несинхронной работе, а в случае их синхронизации используется величина отклонения времени приема, причем, синхронизация сети обеспечивается интегрированным радионавигационным приемником, при этом первичные измерения производятся подвижной станцией, а окончательные вычисления осуществляются сетью подвижной связи.
Способ Cell ID, обеспечивающий идентификацию местоположения подвижной станции с точностью «до соты», основывается на структуре сети подвижной связи и тем самым не требует каких либо дополнительных вычислительных затрат. Точность способа напрямую зависит от структуры сети и ориентировочно варьируется от нескольких десятков километров в ненаселенных пунктах до десятков-сотен метров в условиях густонаселенного города. Модификация указанного способа - Cell ID-ТА основана на определении величины задержки распространения сигнала от базовой станции до подвижной станции в пределах соты. В результате сеть получает значение величины задержки распространения сигнала и идентификатор базовой станции, что несколько повышает точность определения местоположения подвижной станции.
В общем виде существующие способы определения местоположения с использованием дополнительной информации показаны на фиг. 1.
Уменьшение погрешностей и устранение неоднозначности возможно в результате определения местоположения в результате совместного использования данных нескольких различных радионавигационных систем, за счет принципиального отсутствия характерных погрешностей (неоднозначности) одной системы в другой системе.
По технической сущности наиболее близким к предлагаемому изобретению является способ определения местоположения Ubisense [3] представляющий собой локальную систему точного позиционирования в реальном времени. Ubisense базируется на использовании сверхширокополосной (UWB) технологии и позволяет определять координаты объектов с абонентским оборудованием (меткой) и его перемещения в реальном масштабе времени с точностью до 15 см. Рассматриваемая система состоит из активных меток в структуру которых входит сверхширокополосный передатчик UWD, излучающий сверхширокополосные зондирующие импульсы, и приемопередатчик диапазона 2.4 ГГц для обеспечения двухсторонней связи между датчиками и меткой, совокупности радиоприемников (датчиков), получающих и анализирующих сигналов от меток, устанавливаемых на объектах инфраструктуры и программной платформы агрегирующей данные позиционирования.
Датчики группируются в соты преимущественно прямоугольной формы. В каждой соте существует ведущий датчик, координирующий деятельность остальных датчиков и связывающийся со всеми метками, найденными в зоне соты. Возможно создание перекрывающих сот, для создания больших зон покрытия. Данные о местоположении метки передаются посредством локальной вычислительной сети (кабель Ethernet) или по беспроводным каналам связи (WLAN) серверу позиционирования (Location Engine), который собирает данные и передает их через API (интерфейс программирования приложений) внешним приложениям, либо программному приложению (Location Platform) Ubisense для визуализации и пространственной обработке данных. При передвижении меток между сотами, ответственность за их позиционирование переходит от одного главного датчика другому. При настройке системы, указывается трехмерная сетка координат для всей сотовой конфигурации. Модуль визуализации отображает метки в реальном времени в соответствии с их передвижениями в сетке координат.
Принцип работы системы заключается в излучении меткой по команде датчика сверхширокополосного сигнала, приемом указанного сигнала совокупностью датчиков и передача его по каналу связи для дальнейшего анализа серверу позиционирования. Определение местоположения абонента осуществляется путем совместного использования методов позиционирования АоА и TDoA. Система работает в реальном времени, передача информации осуществляется по технологии TDMA. Определение местоположения от момента излучения зондирующего импульса производится за 243 мс. для стандартного исполнения и за 75 мс. для быстродействующей системы.
Существует два вида меток для различных применений, определяющих собственное местоположение с точностью до 15 см в трехмерном представлении, периодичность зондирования составляет от 1 раза в 14 мин. до 40 раз в секунду. Метки имеют внутреннюю репрограммируемую память для сохранения данных, например индивидуального кода.
Недостатки рассмотренного способа заключаются в том, что система содержит совокупность приемных устройств объединенных в сеть, а для определения местоположения подвижного объекта (активной метки) необходимо производить значительный объем вычислений на стационарном сервере системы.
Технической задачей данного изобретения является создание способа определения местоположения объектов, обеспечивающего возможность определения координат в местах, где сигналы других радионавигационных систем недоступны, увеличение точности определения местоположения, снижения объема производимых вычислений в оборудовании подвижного объекта с целью определения координат своего местоположения, уменьшения потребляемой мощности оборудования, уменьшения времени необходимого для определения местоположения.
Поставленная задача достигается тем, что на территории, планируемой для определения местоположения, устанавливают беспроводные метки, в память которых заносят предварительно определенные координаты мест их установки, затем считывающим устройством, установленным на подвижном объекте, координаты которого необходимо определить, считывают информацию о координатах установки ближайшей метки или группы меток, после чего вычисляют координаты местоположения подвижного объекта.
Кроме того, для определения местоположения на подвижный объект устанавливают считывающее устройство, в память которого заносят уникальный номер, затем, при нахождении подвижного объекта в зоне действия беспроводной метки с известными координатами, передают уникальный номер метке, после чего определяют местоположение подвижного объекта.
Помимо этого, в память беспроводной метки вместо предварительно определенных координат установки беспроводных меток заносят уникальный номер, а соответствие между номером и координатами мест установки беспроводных меток, а также другую дополнительную информацию, связанную с местоположением подвижного объекта, хранят в базе данных.
Дополнительно, информацию о координатах нескольких меток, определяют направление перемещения и скорость подвижного объекта и/или увеличивают точность определения местоположения подвижного объекта.
Кроме того, используя информацию с нескольких беспроводных меток, определяют направление перемещения и скорость подвижного объекта и/или увеличивают точность определения местоположения подвижного объекта.
Кроме того, в память беспроводной метки, помимо информации о координатах ее установки, записывают дополнительную информацию.
Помимо этого после определения местоположения считывающим устройством, подвижному объекту передают необходимую информацию, связанную с его текущим местоположением.
Дополнительно, в местах, где беспроводные метки или считывающие устройства не установлены, для определения местоположения подвижного объекта используют доступные радионавигационные системы.
Помимо этого определение местоположения может быть доступно только некоторой выделенной группе подвижных объектов.
Таким образом, поставленные задачи решаются за счет размещения беспроводных меток на территории, планируемой для определения местоположения, в память которых заносят предварительно определенные с высокой точностью координаты мест их установки, и использования полученных координат для определения местоположения с точностью до радиуса действия беспроводной метки или, используя сигналы двух или более меток, и, например, метод триангуляции, определяют координаты объекта с более высокой точностью.
Увеличение точности определения местоположения достигается за счет использования сети беспроводных меток размещаемых на территории где необходимо реализовать процедуру определения местоположения и существенно меньшего радиуса их действия, чем погрешность определения местоположения известных радионавигационных систем. Снижение объема производимых вычислений в оборудовании подвижной станции, уменьшение потребляемой мощности используемого оборудования, уменьшение времени необходимого для определения местоположения, связано с тем, что в память беспроводной метки уже введена информация о координатах ее установки, таким образом, в приемном устройстве, нет необходимости производить решения навигационной задачи.
Изобретение поясняется чертежами.
На фиг. 1 в общем виде показан принцип действия существующих способов определения местоположения.
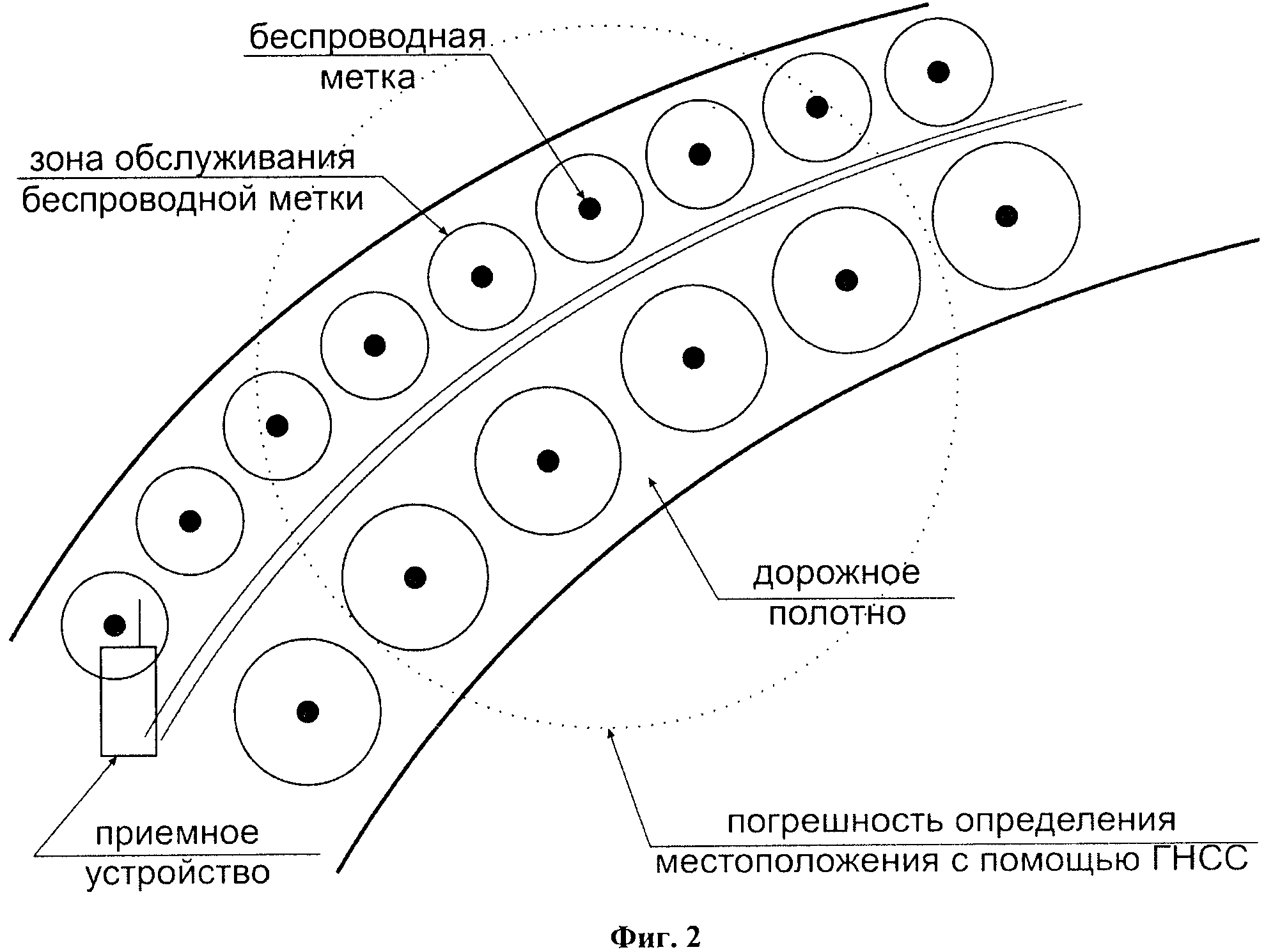
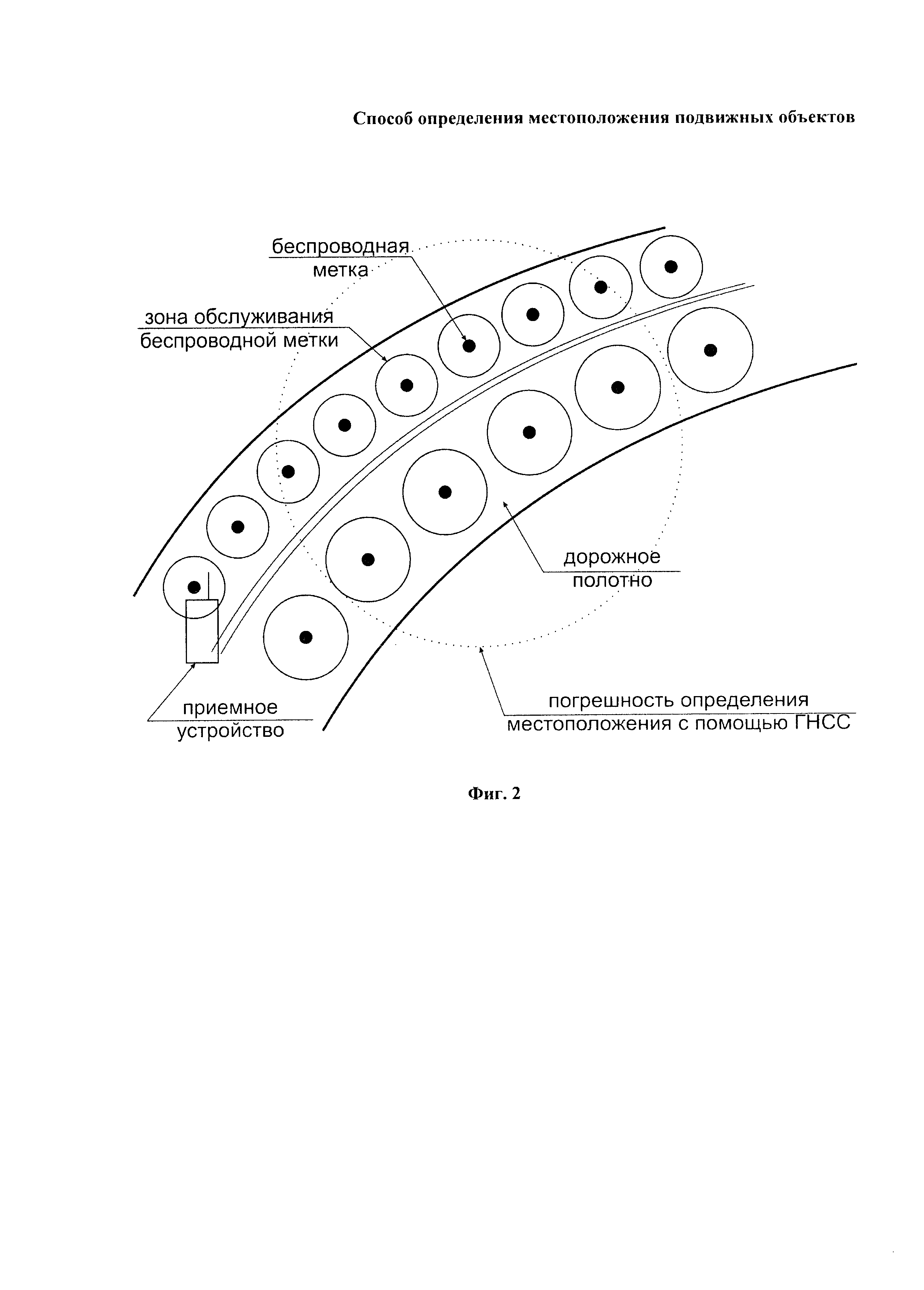
На фиг. 2 приведена структурная схема системы определения местоположения с использованием беспроводных меток.
Предлагаемый способ определения местоположения, заключается в следующем.
На территории, где необходимо производить определение местоположения подвижных объектов формируют сеть беспроводных меток. Координаты мест установки беспроводных меток предварительно определяют любым из известных методов и вносят в память беспроводной метки. На подвижном объекте, координаты которого необходимо определить, устанавливают приемник сигналов беспроводных меток, который считывает сигнал с ближайшей к нему метки, содержащей информацию о географических координатах ее установки, и, тем самым, производит определение своего местоположения. Как вариант в память метки вместо координат ее установки возможна запись уникального номера, а соответствие между уникальным номером и координатами установки возможно хранить в базе данных. Помимо информации о координатах установки, в память беспроводной метки или базу данных может заноситься любая необходимая информация, например, о ближайших объектах социальной сферы, магазинах, заправках и т.д. В качестве беспроводных меток могут использоваться, например, активные и пассивные RFID метки, установленные в асфальтобетонном покрытии, на различных сооружениях, предметах и т.д. (фиг. 2). Кроме того, используя сигналы двух и более беспроводных меток, определяют скорость перемещения и направление движения подвижного объекта или увеличивают точность определения местоположения.
Модификацией способа, является способ, заключающийся в том, что на подвижный объект устанавливают считывающее устройство с уникальным номером, а на территории, планируемой для определения местоположения, устанавливают беспроводные метки с известными координатами, передают уникальный номер метке, после чего определяют местоположение подвижного объекта, а также способ, отличающийся тем, что в память беспроводной метки заносят уникальный номер, а соответствие между номером и координатами мест их установки, а также другую дополнительную информацию, связанную с местоположением подвижного объекта, хранят в базе данных.
В местах, где беспроводные метки или считывающие устройства не установлены, для определения местоположения подвижного объекта используют доступные радионавигационные системы.
Способ может использоваться как любым подвижным объектом - открытый режим использования, так и только теми подвижными объектами (некоторой выделенной группой), которым предоставлено право определения местоположения - закрытый режим использования.
Техническим результатом предлагаемого изобретения является увеличение точности определения местоположения подвижного объекта, в том числе при совместном использовании радионавигационных сетей и сформированной сети беспроводных меток, снижения объема производимых вычислений в оборудовании подвижного объекта с целью определения координат своего местоположения, уменьшения потребляемой мощности оборудования, уменьшения времени необходимого для определения местоположения.
Дополнительным техническим результатом является: возможность определения скорости и направления движения подвижных объектов, передача дополнительной информации подвижному объекту, а также определение координат подвижных объектов с точностью менее радиуса действия беспроводной метки.
Таким образом, сущность изобретения заключается в том, что на территории, планируемой для определения местоположения, устанавливают беспроводные метки, в память которых заносят предварительно определенные координаты мест их установки, затем считывающим устройством, установленным на подвижном объекте, координаты которого необходимо определить, считывают информацию о координатах установки ближайшей метки или группы меток, после чего вычисляют координаты местоположения подвижного объекта.
Кроме того, для определения местоположения на подвижный объект устанавливают считывающее устройство, в память которого заносят уникальный номер, затем, при нахождении подвижного объекта в зоне действия беспроводной метки с известными координатами, передают уникальный номер метке, после чего определяют местоположение подвижного объекта.
Помимо этого, в память беспроводной метки вместо предварительно определенных координат установки беспроводных меток заносят уникальный номер, а соответствие между номером и координатами мест установки беспроводных меток, а также другую дополнительную информацию, связанную с местоположением подвижного объекта, хранят в базе данных.
Дополнительно, информацию о координатах нескольких меток, определяют направление перемещения и скорость подвижного объекта и/или увеличивают точность определения местоположения подвижного объекта.
Кроме того, используя информацию с нескольких считывающих устройств, определяют направление перемещения и скорость подвижного объекта и/или увеличивают точность определения местоположения подвижного объекта.
Кроме того, в память беспроводной метки, помимо информации о координатах ее установки, записывают дополнительную информацию.
Помимо этого после определения местоположения считывающим устройством, подвижному объекту передают необходимую информацию, связанную с его текущим местоположением.
Дополнительно, в местах, где беспроводные метки или считывающие устройства не установлены, для определения местоположения подвижного объекта используют доступные радионавигационные системы.
Помимо этого определение местоположения может быть доступно только некоторой выделенной группе подвижных объектов.
Источники информации
1. К. Одуан, Б. Гино. Измерение времни. Основы GPS (с дополнениями М.Б. Кауфмана), Москва, Техносфера, 2002, стр. 365.1. Asha Mehrotra. Cellular Radio. Analog and Digital Systems. Artech House, Inc. 1994, 460 p.
2. Ю.А. Громаков, А.В. Северин, В.А. Шевцов. Технологии определения местоположения в GSM и UMTS. Москва, Экотрендз, 2005 г., стр. 39.
3. Ubisense Precise Location // URL: http://www.ubisense.net/en/resources/factsheets/ubisense-precise-location.html (дата обращения: 01.08.2010).
Способ подвижной радиосвязи
Многофункциональная многодиапазонная масштабируемая радиолокационная система для летательных аппаратов
Способ подвижной радиосвязи
Многофункциональная многодиапазонная масштабируемая радиолокационная система для летательных аппаратов
Интегрированная цифровая система технологической связи
Способ и система предотвращения несанкционированного проведения операций с цифровыми данными в цифровой информационной системе

