Результат интеллектуальной деятельности: МНОГОФУНКЦИОНАЛЬНАЯ МНОГОДИАПАЗОННАЯ МАСШТАБИРУЕМАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА ДЛЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ
Вид РИД
Изобретение
Изобретение относится к области радиолокации и предназначено для выполнения широкого круга задач в режимах «воздух-поверхность», «воздух-воздух», «метео» и «маловысотный полет» при использовании на летательных аппаратах.
Известны РЛС для летательных аппаратов, предназначенные для обнаружения, сопровождения объектов, измерения их координат, обнаружения грозовых фронтов, обнаружения и измерения высоты наземных препятствий и выполнения других функций.
Например, двухдиапазонный моноимпульсный радиолокатор со встроенным контролем, заявка №2001104500 от 20.02.2001 г. Радиолокатор содержит антенну с диапазонным суммарно-разностным устройством и вспомогательными антеннами, два приемо-передающих тракта. Решены задачи моноимпульсной пеленгации при работе в двух диапазонах. Однако радиолокатор имеет следующие недостатки: приемный тракт - аналоговый, низкие помехозащищенность и разрешение по координатам, не обеспечена многофункциональность.
В радиолокаторе, защищенным патентом WO 2010090564, достигнуто высокое разрешение по координатам при работе в двух диапазонах. К недостаткам относятся: низкая помехозащищенность, отсутствует моноимпульсная пеленгация, не обеспечена многофункциональность.
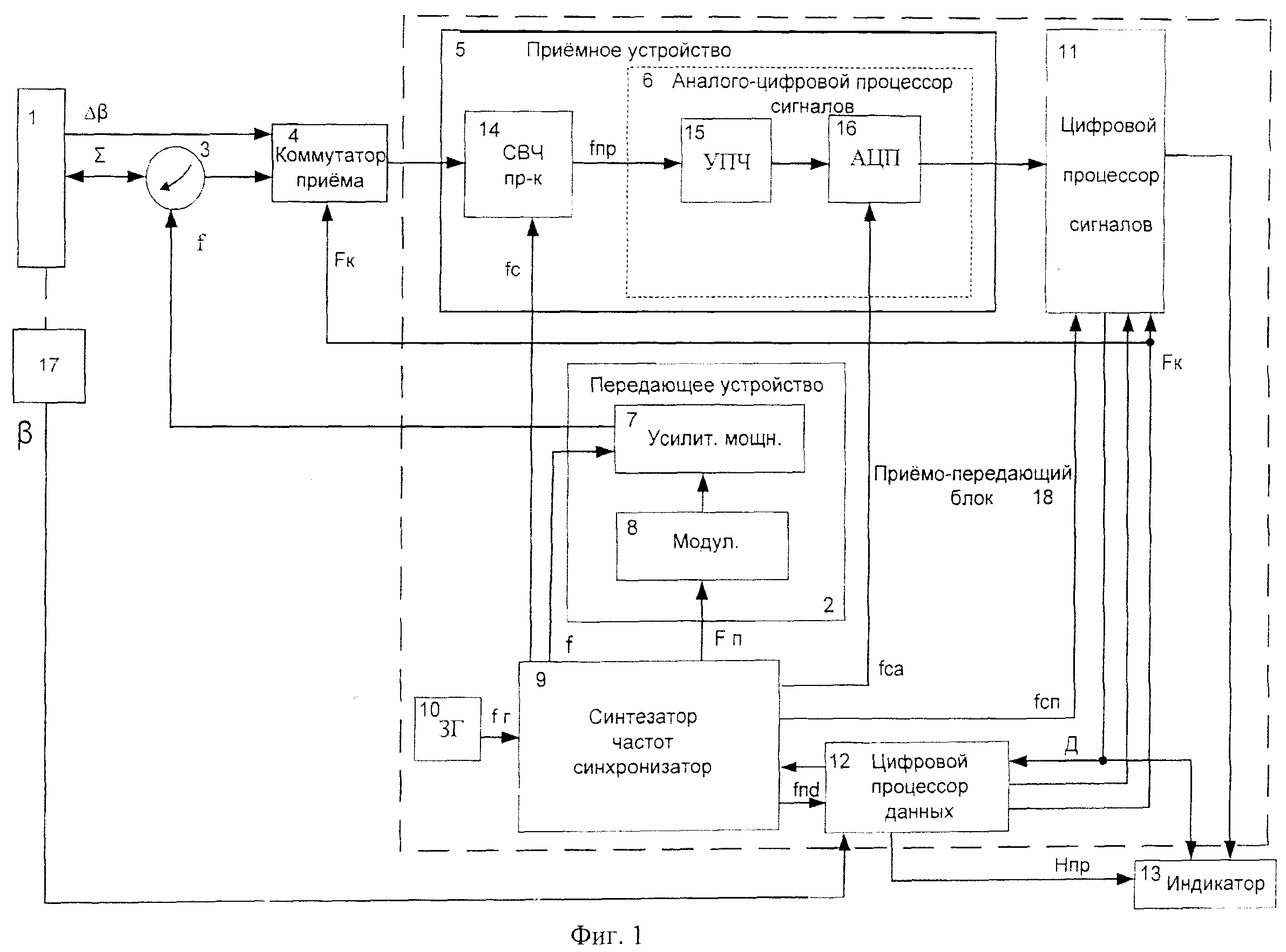
Известна также многофункциональная радиолокационная станция для летательных аппаратов (RU патент №2319173, МПК G01S 13/90), принятая за прототип. Структура приведена на фиг.1, где обозначены:
1. Щелевая антенна;
2. Передающее устройство;
3. Циркулятор;
4. Коммутатор приема;
5. Приемное устройство;
6. Аналого-цифровой процессор;
7. Усилитель мощности;
8. Модулятор;
9. Синтезатор частот - синхронизатор;
10. Задающий генератор;
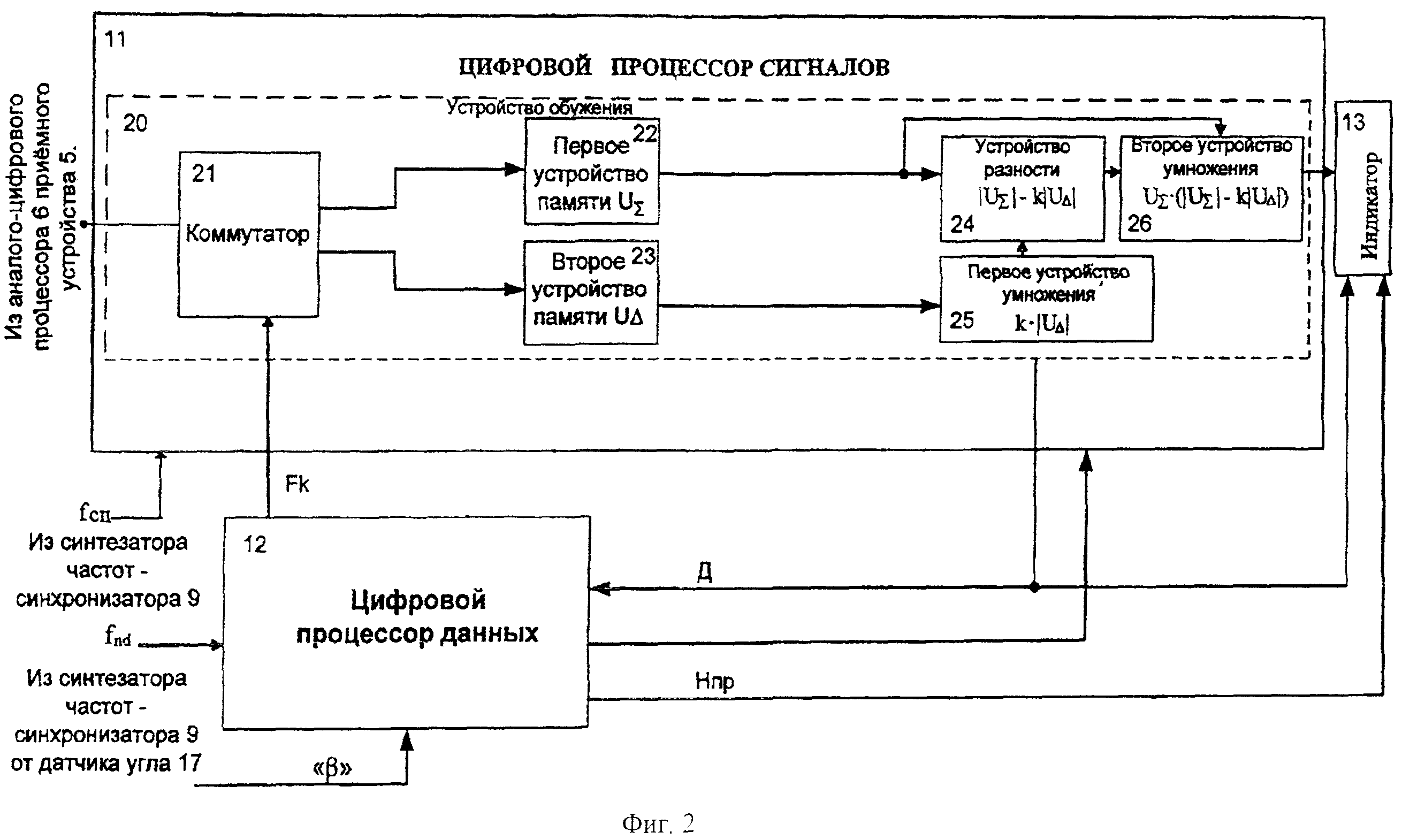
11. Цифровой процессор сигналов;
12. Цифровой процессор данных;
13. Индикатор;
14. СВЧ-приемник;
15. Усилитель промежуточной частоты;
16. Аналого-цифровой преобразователь (АЦП);
17. Датчик угла;
18. Приемо-передающий блок.
Данная РЛС выполняет функции обнаружения грозовых фронтов и кучевых облаков, обзора земной поверхности, обнаружения и измерения высоты наземных препятствий при полете на малых высотах. Функция измерения с заданной точностью высоты наземных препятствий обеспечивается путем обужения луча антенны в угломестной плоскости на прием. Это достигается тем, что в щелевой антенне кроме суммарной диаграммы формируется разностная диаграмма в угломестной плоскости.
Для реализации задачи обужения в угломестной плоскости суммарной диаграммы используется сигнал разностной диаграммы для чего в цифровой процессор сигналов введено устройство обужения, включающее коммутатор, первое устройство памяти (U∑), второе устройство памяти (UΔ), устройство разности, первое и второе устройство умножения (см. фиг.2).
Данная РЛС имеет следующие недостатки: работа в одном диапазоне, отсутствует моноимпульсная пеленгация по азимуту, нет высокого разрешения по координатам, синтезатор частот аналоговый, что не позволяет наращивать функции.
Учитывая современные требования к реализуемым функциям радиолокационных систем летательных аппаратов, к повышению разрешения, точности и надежности решения задач при жестких ограничениях на габариты аппаратуры, задачей изобретения является создание многофункциональной, многодиапазонной, малогабаритной, масштабируемой системы.
Решение поставленной задачи достигается тем, что предлагаемая РЛС (см. фиг.3) содержит i,  радиочастотных модулей (РЧМ) различных диапазонов длин волн, каждый из которых состоит из антенного модуля (1), содержащего волноводно-щелевую антенную решетку (ВЩАР) (2) и привод (3), передатчика (9), циркулятора (7), приемозадающего модуля (5), содержащего четырехканальный сверхвысокочастотный приемник (СВЧ-приемник) (6), цифровой приемник (ЦПРМ) (8), цифровой синтезатор частот и синхросигналов управления (СЧС) (10), при этом ЦПРМ содержит четырехканальный аналого-цифровой преобразователь (АЦП), программируемую логическую интегральную схему (ПЛИС 1) обработки информации и управления, программируемую логическую интегральную схему (ПЛИС 2) ввода-вывода, при этом первые входы АЦП подключены к соответствующим выходам СВЧ-приемника по четырем приемным каналам - суммарному, разностному по наклону, разностному по азимуту и компенсационному - на промежуточной частоте, выходы АЦП подключены к ПЛИС 1 обработки информации и управления, «вход-выход» которой посредством интерфейсной связи соединен с «входом-выходом» ПЛИС 2 ввода-вывода, которая в свою очередь посредством последовательного высокоскоростного интерфейса (SRIO) (типа точка-точка) соединена с бортовой цифровой вычислительной машиной (БЦВМ), первый выход СЧС соединен с входом передатчика, второй выход - с входом СВЧ-приемника, третий выход - со вторым входом АЦП, четвертый выход - с ПЛИС 1 цифрового приемника и с БЦВМ, а вход СЧС - с БЦВМ посредством мультиплексного канала информационного обмена (МКИО). На фиг.3 обозначены:
радиочастотных модулей (РЧМ) различных диапазонов длин волн, каждый из которых состоит из антенного модуля (1), содержащего волноводно-щелевую антенную решетку (ВЩАР) (2) и привод (3), передатчика (9), циркулятора (7), приемозадающего модуля (5), содержащего четырехканальный сверхвысокочастотный приемник (СВЧ-приемник) (6), цифровой приемник (ЦПРМ) (8), цифровой синтезатор частот и синхросигналов управления (СЧС) (10), при этом ЦПРМ содержит четырехканальный аналого-цифровой преобразователь (АЦП), программируемую логическую интегральную схему (ПЛИС 1) обработки информации и управления, программируемую логическую интегральную схему (ПЛИС 2) ввода-вывода, при этом первые входы АЦП подключены к соответствующим выходам СВЧ-приемника по четырем приемным каналам - суммарному, разностному по наклону, разностному по азимуту и компенсационному - на промежуточной частоте, выходы АЦП подключены к ПЛИС 1 обработки информации и управления, «вход-выход» которой посредством интерфейсной связи соединен с «входом-выходом» ПЛИС 2 ввода-вывода, которая в свою очередь посредством последовательного высокоскоростного интерфейса (SRIO) (типа точка-точка) соединена с бортовой цифровой вычислительной машиной (БЦВМ), первый выход СЧС соединен с входом передатчика, второй выход - с входом СВЧ-приемника, третий выход - со вторым входом АЦП, четвертый выход - с ПЛИС 1 цифрового приемника и с БЦВМ, а вход СЧС - с БЦВМ посредством мультиплексного канала информационного обмена (МКИО). На фиг.3 обозначены:
1. Антенный модуль;
2. Волноводно-щелевая антенная решетка (ВЩАР);
3. Привод антенны;
4. Радиочастотный модуль i,  ;
;
5. Приемозадающий модуль;
6. СВЧ-приемник;
7. Циркулятор;
8. Цифровой приемник;
9. Передатчик;
10. Синтезатор частот и синхросигналов управления;
11. БЦВМ;
МКИО - мультиплексный канал информационного обмена;
SRIO - последовательный высокоскоростной интерфейс.
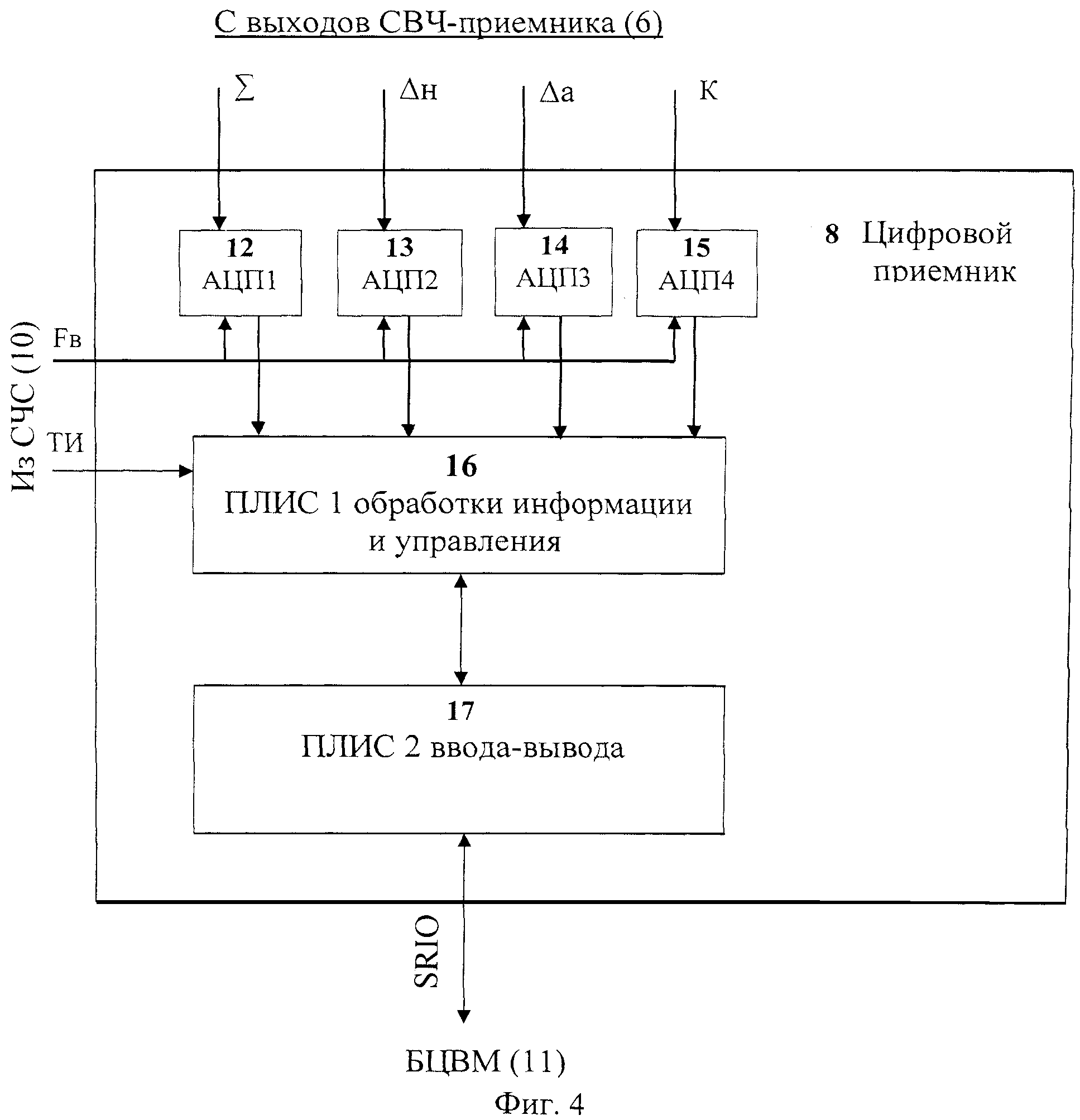
На фиг.4 представлена блок-схема цифрового приемника, где обозначены:
12. АЦП1 суммарного канала ∑;
13. АЦП2 разностного канала по наклону Δн;
14. АЦП3 разностного канала по азимуту Δa;
15. АЦП4 компенсационного канала К;
16. Программируемая логическая интегральная схема (ПЛИС 1) обработки информации и управления;
17. Программируемая логическая интегральная схема (ПЛИС 2) ввода-вывода информации;
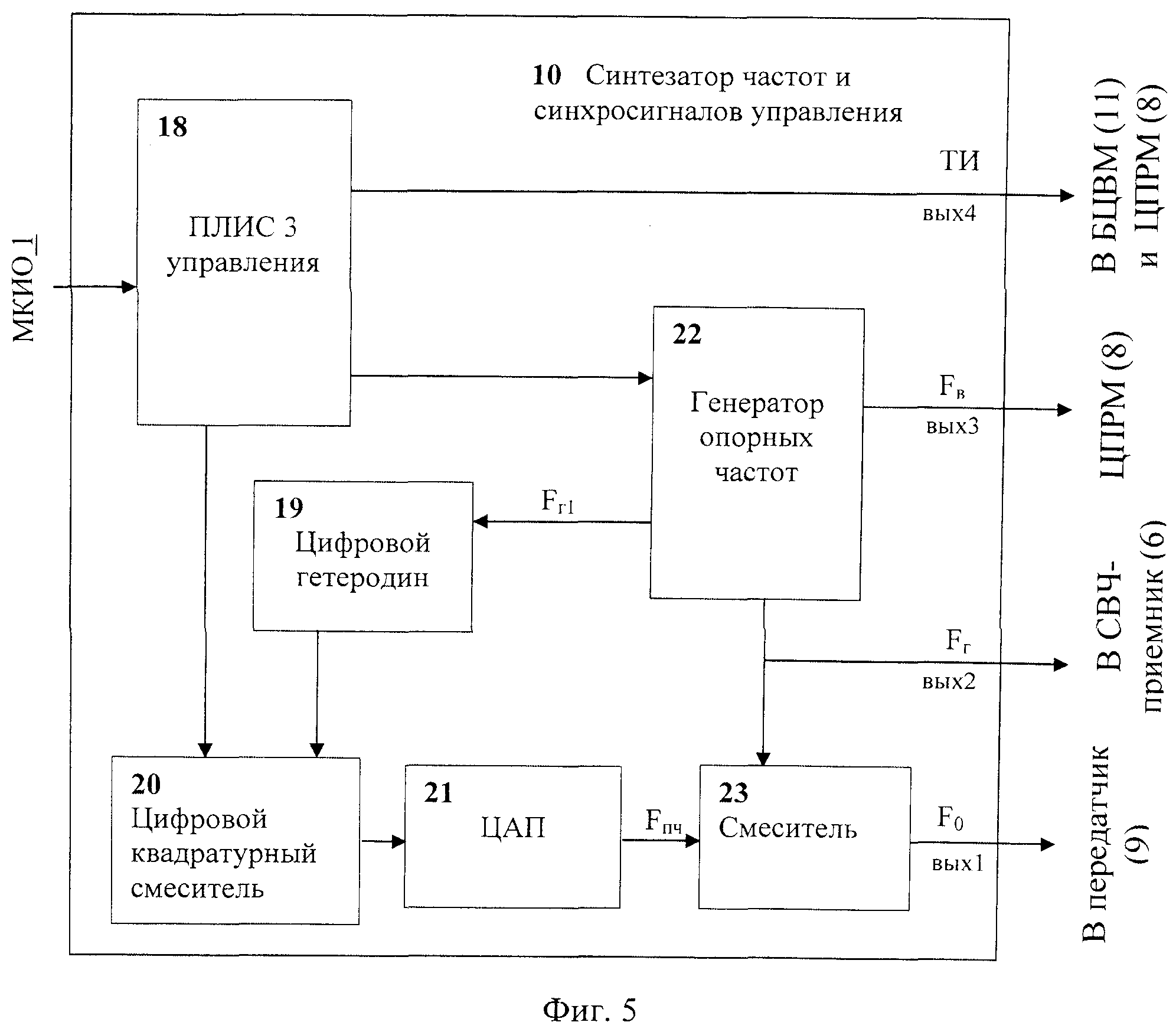
На фиг.5 приведена блок-схема цифрового синтезатора частот и синхросигналов управления, где обозначены:
18. Программируемая логическая интегральная схема (ПЛИС 3) управления;
19. Цифровой гетеродин;
20. Цифровой квадратурный смеситель;
21. Цифро-аналоговый преобразователь (ЦАП);
22. Генератор опорных частот;
23. Смеситель.
Построение предлагаемой многофункциональной многодиапазонной масштабируемой радиолокационной системы основывается на применении современных цифровых методов и устройств обработки, приема и передачи информации и программного обеспечения (ПО) реального времени. Это позволило создать малогабаритные с высокой степенью интеграции радиочастотные модули, которые объединены с БЦВМ в составе РЛС интерфейсами информационного обмена и практически не имеют ограничений по взаимному размещению.
Предлагаемая в соответствии с фиг.3 радиолокационная система состоит из i,
идентичных радиочастотных модулей (4), в зависимости от числа используемых частотных диапазонов и единой БЦВМ (11), которая связана с каждым из i модулей (4) последовательным высокоскоростным интерфейсом (SRIO i) и управляющим интерфейсом МКИО 1.
Излучение зондирующего сигнала производится по суммарному (z) каналу ВЩАР (2), для чего выход передатчика (9) соединен с входом циркулятора (7), а «вход-выход» циркулятора (7) соединен с суммарным каналом ВЩАР (2).
Прием отраженных зондирующих сигналов осуществляется с помощью антенного модуля (1) через ВЩАР (2) по суммарному (∑), разностному по наклону (Δн), разностному по азимуту (Δa) и компенсационному (К) каналам. Для передачи принимаемого ВЩАР (2) сигнала по суммарному каналу (∑) выход циркулятора (7) соединен с первым входом СВЧ-приемника (6). Для передачи принимаемого сигнала по каналу разностному по наклону (Δн) второй выход ВЩАР (2) соединен со вторым входом СВЧ-приемника (6). Для передачи принимаемого сигнала по каналу разностному по азимуту (Δа) третий выход ВЩАР (2) соединен с третьим входом СВЧ-приемника (6). Для передачи принимаемого сигнала по каналу компенсационному (К) четвертый выход ВЩАР (2) соединен с четвертым входом СВЧ-приемника (6). Выходы соответствующих каналов СВЧ-приемников (6) на промежуточной частоте подключены соответственно к первым входам АЦП1 (12), АЦП2 (13), АЦП3 (14), АЦП4 (15) цифрового приемника (8), структура которого приведена на фиг.4. В цифровом приемнике (8) «оцифрованные» сигналы каналов приема ∑, Δн, Δа и К с выходов АЦП1 (12), АЦП2 (13), АЦП3 (14), АЦП4 (15) соответственно поступают на первый, второй, третий и четвертый входы ПЛИС 1 обработки информации и управления (16), где осуществляется цифровое гетеродинирование, демодуляция сигналов с линейно-частотной модуляцией (ЛЧМ) и компенсация изменений фазы принятого сигнала, обусловленных движением носителя. Для обмена данными цифрового приемника (8) «вход-выход» ПЛИС 1 (16) подсоединен к «входу-выходу» ПЛИС 2 (17) ввода-вывода, которая в свою очередь посредством последовательного высокоскоростного интерфейса SRIO соединена с «входом-выходом» БЦВМ (11).
Формирование сигналов тактового интервала (ТИ) и частоты выборок (Fв), используемых в цифровом приемнике (8) и БЦВМ (11), производится в СЧС (10), представленном на фиг.5, четвертый выход которого с обозначением ТИ подключен к входу ПЛИС 1 обработки информации и управления (16) цифрового приемника (8) и БЦВМ (11), а третий выход с обозначением fb подключен ко вторым управляющим входам АЦП1 (12), АЦП2 (13), АЦПЗ (14), АЦП4 (15) цифрового приемника (8).
Для передачи сигнала частоты гетеродина (Fг) второй выход СЧС (10) подсоединен к пятому входу СВЧ-приемника (6).
Для передачи сигнала несущей частоты F0 первый выход СЧС (10) подсоединен к входу передатчика (9).
Управление СЧС (10) производится от БЦВМ по каналу МКИО 1 посредством ПЛИС 3 управления (18), выходные сигналы которой поступают на цифровой квадратурный смеситель (20) и генератор опорных частот (22).
Для первого частотного преобразования формируемого сигнала несущей частоты F0 со второго выхода генератора опорных частот (22) сигнал первого гетеродина Fг1 через вход и последующий выход цифрового гетеродина (19) подается на первый вход цифрового квадратурного смесителя (20).
Для формирования сигнала F0 со сложными законами модуляции и оперативной «перестройкой от импульса к импульсу» «модуляционная» составляющая этого сигнала по внутренней шине с первого выхода ПЛИС 3 (18) подается на второй вход цифрового квадратурного смесителя (20), с выхода которого формируемый сигнал в цифровой форме подается на вход цифро-аналогового преобразователя (ЦАП) (21), где преобразуется в аналоговый сигнал и поступает на смеситель (23). На второй вход смесителя (23) с генератора опорных частот (22) поступает сигнал частоты гетеродина Fг. В смесителе (23) формируется сигнал несущей частоты F0, который подается на вход передатчика (9).
Предлагаемая архитектура РЛС и построение описанных устройств обеспечивают получение широких информационных возможностей, высоких разрешения и точности за счет формирования сложных широкополосных зондирующих сигналов и последующей предварительной, первичной и вторичной обработки принимаемых сигналов.
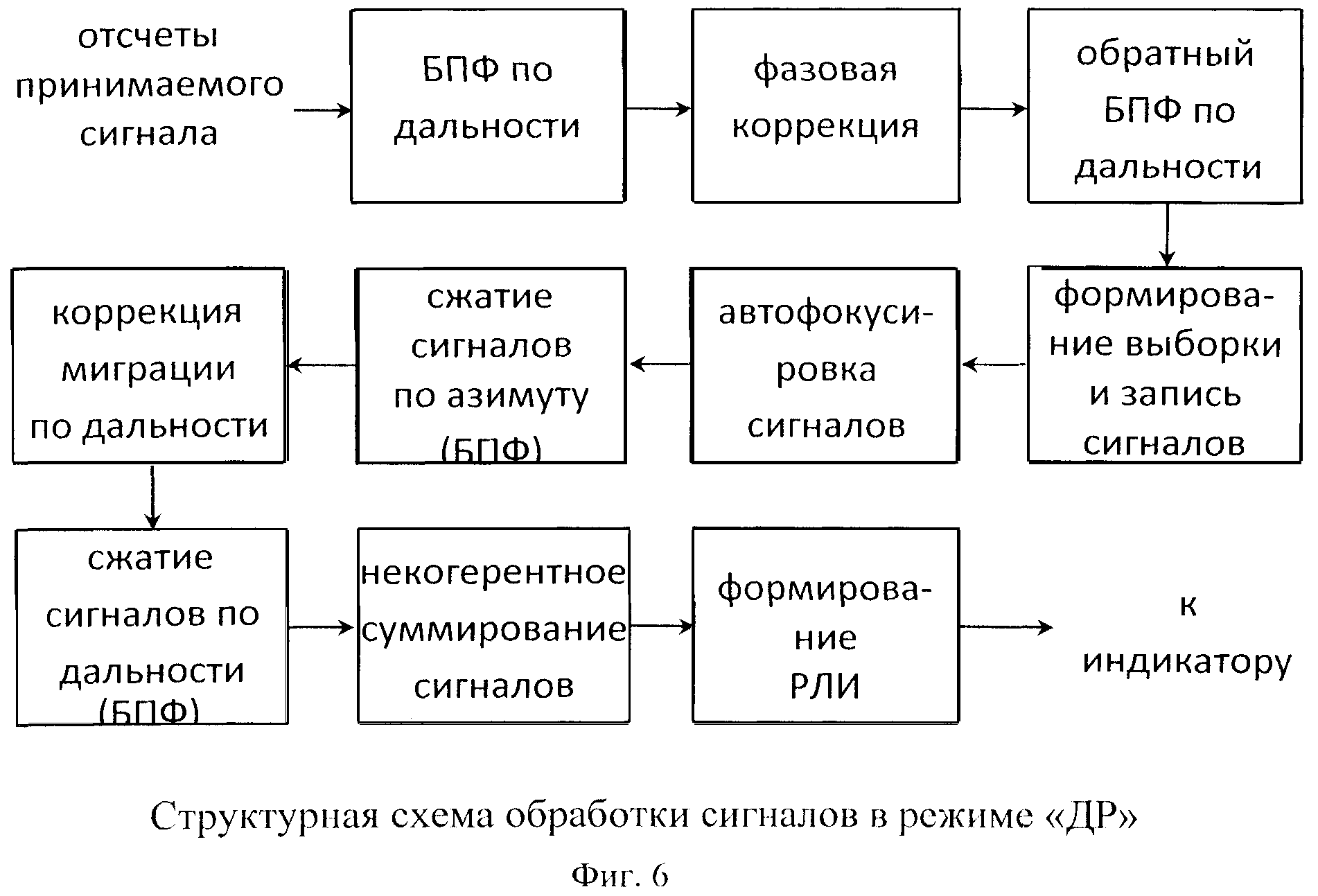
Ниже приведен пример обработки сигналов, реализующий режим детального разрешения (ДР), и показаны возможности РЛС по использованию новых высокоэффективных методов обработки сигналов.
На фиг.6 изображена схема реализации режима ДР. Обработка радиолокационных сигналов осуществляется в три этапа. На первом этапе выполняется предварительная обработка в цифровом приемнике (8). При этом производится:
- измерение максимального уровня сигнала;
- удаление постоянной составляющей в сигнале;
- цифровое гетеродинирование (компенсация изменений фазы принимаемого сигнала от отсчета к отсчету и от импульса к импульсу из-за движения носителя);
- демодуляция ЛЧМ-сигналов.
На этапе два выполняется первичная обработка сигналов на первом микропроцессоре центрального процессора БЦВМ (11). При этом осуществляется преобразование частотно-манипулированного сигнала, включающее в себя:
- БПФ (быстрое преобразование Фурье) по дальности;
фазовую коррекцию, компенсирующую зависимость задержки принимаемого сигнала от расстояния;
- обратное БПФ по дальности;
- формирование выборки (коррекцию фазы сигнала для устранения зависимости доплеровской частоты от расстояния и изменения расстояния от импульса к импульсу внутри такта работы РЛС, стыковка фрагментов выборки во временной области);
- запись выборок (радиоголограмм) в память.
На этапе три выполняется вторичная обработка сигналов на втором микропроцессоре центрального процессора БЦВМ (11). При этом осуществляются:
- автофокусировка сигналов;
- сжатие сигналов по азимуту с помощью БПФ;
- фазовая коррекция миграции сигналов по элементам дальности;
- сжатие сигналов по дальности с помощью БПФ;
- некогерентное суммирование сигналов по нескольким несущим частотам для уменьшения спекл-эффекта;
- формирование радиолокационного изображения (РЛИ) (компенсация амплитудной модуляции, вызванной действием автоматической регулировки усиления сигнала (АРУС), влиянием диаграммы направленности антенны (ДНА) по азимуту и наклону, а также изменением уровня сигнала от расстояния, вычисление экранных координат точек РЛИ, формирование массива амплитуд в формате индикатора, преобразование динамического диапазона амплитуд сигналов к динамическому диапазону РЛИ, выдача информации на индикатор по интерфейсу RS 343A).
Синхронизация работы РЛС и информационного обмена процессоров обработки сигналов осуществляется под управлением третьего микропроцессора центрального процессора БЦВМ (11), который также выполняет:
- формирование зоны обзора;
- управление модулями РЧМ;
- прием информации от навигационной системы по МКИО 2 (на фиг.3 не показан);
- расчет траектории движения летательного аппарата;
- вычисление параметров, необходимых для выполнения обработки принимаемых сигналов.
Таким образом, посредством разработанного ПО в предлагаемой РЛС обеспечивается решение задач прототипа, а также дополнительно реализуются следующие функции и свойства:
1. Одновременная или выборочная работа в разных частотных диапазонах, например, миллиметровом, сантиметровом и дециметровом, что позволяет, используя особенности распространения и отражения радиосигналов в разных средах, интегрально получить более высокие характеристики по дальности, точности, разрешающей способности в простых и сложных помеховых и метеоусловиях, а также обеспечить обнаружение и наблюдение объектов, скрытых растительным или другим радиопрозрачным покровом для используемых диапазонов частот.
2. Картографирование с реальным лучом и синтезированием апертуры.
3. Информационное обеспечение маловысотного полета с формированием профильного (по вертикали и горизонтали) и квазитрехмерного радиолокационного изображения поверхности земли и объектов (включая обнаружение проводов ЛЭП).
4. Селекция движущихся, в том числе малоскоростных объектов.
5. Определение зон повышенной турбулентности и низковысотных «сдвигов ветра».
6. Обзор, обнаружение и дискретное сопровождение воздушных целей.
7. Масштабируемость, позволяющая для решения конкретных задач и для конкретных носителей при сохранении общего управления от БЦВМ выбрать тот или иной состав и размещение радиочастотных модулей.
Многофункциональная многодиапазонная масштабируемая радиолокационная система для летательных аппаратов, содержащая радиочастотный модуль (РЧМ) и бортовую цифровую вычислительную машину (БЦВМ), отличающаяся тем, что она содержит i РЧМ, , каждый из которых имеет свой рабочий диапазон длин волн, состоит из антенного модуля, содержащего волноводно-щелевую антенную решетку (ВЩАР) и привод, передатчика, циркулятора, приемозадающего модуля, содержащего четырехканальный сверхвысокочастотный приемник (СВЧ-приемник), цифровой приемник, цифровой синтезатор частот и синхросигналов управления (СЧС), и имеет связь с БЦВМ, при этом для излучения зондирующего сигнала выход передатчика соединен через циркулятор с суммарным каналом ВЩАР, а для приема отраженного сигнала по суммарному каналу ВЩАР соединена через циркулятор с суммарным каналом СВЧ-приемника, для приема по разностным каналам по наклону и по азимуту ВЩАР соединена с соответствующими разностными каналами СВЧ-приемника и для приема по компенсационному ВЩАР соединена с компенсационным каналом СВЧ-приемника, выходы которого на промежуточной частоте соединены соответственно с четырьмя входами цифрового приемника, содержащего четырехканальный аналого-цифровой преобразователь (АЦП), программируемую логическую интегральную схему (ПЛИС 1) обработки информации и управления, программируемую логическую интегральную схему (ПЛИС 2) ввода-вывода, при этом выходы четырехканального АЦП соединены с четырьмя входами ПЛИС 1, а «вход-выход» ПЛИС 1 соединен с «входом-выходом» ПЛИС 2, которая, в свою очередь, посредством высокоскоростного последовательного интерфейса SRIO соединена с БЦВМ, при этом первый выход СЧС - выход сигнала несущей частоты F соединен с входом передатчика, второй выход - выход сигнала гетеродина частоты F соединен с входом СВЧ-приемника, третий выход - выход сигнала частоты выборок F соединен с управляющим входом четырехканального АЦП цифрового приемника, четвертый выход - выход сигналов тактового интервала ТИ соединен с управляющим входом ПЛИС 1 цифрового приемника и БЦВМ, а вход СЧС соединен с БЦВМ посредством мультиплексного канала информационного обмена.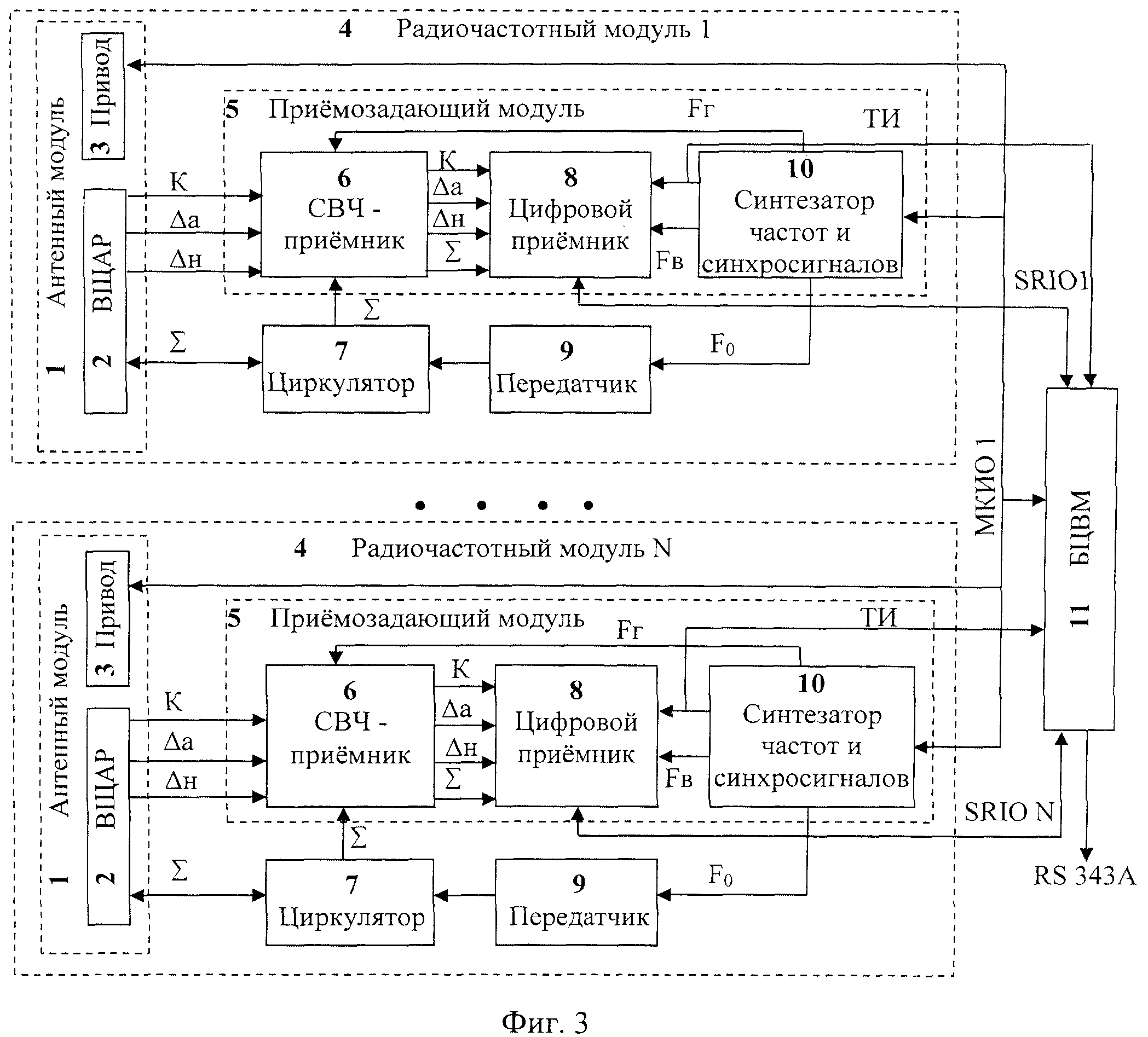

Способ подвижной радиосвязи
Способ разрешения групповой цели
Радиолокационная станция с синтезированием апертуры и квазинепрерывным излучением
Способ цифрового формирования диаграммы направленности активной фазированной антенной решетки при излучении и приеме линейно-частотно-модулированного сигнала
Радиолокационная система для летательных аппаратов
Способ определения местоположения подвижных объектов
Способ обужения приемной диаграммы направленности антенны и многофункциональная радиолокационная станция для летательных аппаратов, реализующая этот способ
Многофункциональная интегрированная двухдиапазонная радиолокационная система для летательных аппаратов
Многофункциональная малогабаритная радиолокационная система для летательных аппаратов
Способ подвижной радиосвязи
Способ разрешения групповой цели
Радиолокационная станция с синтезированием апертуры и квазинепрерывным излучением
Способ цифрового формирования диаграммы направленности активной фазированной антенной решетки при излучении и приеме линейно-частотно-модулированного сигнала
Радиолокационная система для летательных аппаратов
Способ определения местоположения подвижных объектов
Способ обужения приемной диаграммы направленности антенны и многофункциональная радиолокационная станция для летательных аппаратов, реализующая этот способ
Многофункциональная малогабаритная радиолокационная система для летательных аппаратов
Бортовая активная фазированная антенная решетка х-диапазона с увеличенным сектором сканирования
Двухдиапазонный импульсно-доплеровский радиолокатор

