Результат интеллектуальной деятельности: СИСТЕМА УПРАВЛЕНИЯ ДИНАМИЧЕСКИМИ ОБЪЕКТАМИ УПРАВЛЕНИЯ С ИХ ИДЕНТИФИКАЦИЕЙ
Вид РИД
Изобретение
Изобретение относится к автоматическому управлению и может быть использовано в системах автоматического управления динамическими нестационарными объектами, математические модели которых могут содержать переменные операторы и/или параметры.
Примером таких объектов может служить кислородный конвертер - агрегат для выплавки стали из предельного расплавленного чугуна и металлического лома продувкой технически чистым кислородом. Выбор такого объекта обусловлен наличием большого числа прямых и обратных связей, технологический процесс в котором подвержен влиянию неконтролируемых возмущений, обусловленных, в частности, изменениями характеристик качества исходного сырья и топлива, нарушениями процесса выплавки, старением элементов конструкции агрегата, что приводит к изменению гидродинамических и тепловых процессов в агрегате. Кроме того, рассматриваемый объект является объектом с вариабельной структурой, которая изменяется, например, при коррекции соотношения «чугун - лом» в агрегате, а также при выборе различных материалов на выплавку, что наряду с изменением технологии производства влечет за собой необходимость изменения математической модели объекта управления.
Известна система управления [1], близкая по физической сущности к предлагаемой системе, которая содержит объект управления, последовательно включенные задатчик, первый блок сравнения, блок формирования свойств ошибок регулирования, второй блок сравнения, операторный регулятор, координатный регулятор, второй вход которого соединен с выходом первого блока сравнения, выход координатного регулятора соединен с входом объекта управления, выход которого подключен к второму входу первого блока сравнения, выход которого подключен к второму входу второго блока сравнения, выход объекта управления подключен к выходу системы.
Наиболее близкой по технической сущности к предлагаемой системе управления с идентификацией является система управления [2], содержащая задатчик, последовательно соединенные объект управления, первый блок сравнения, координатный регулятор, последовательно соединенные блок формирования свойств ошибок регулирования, второй блок сравнения, операторный регулятор, выход координатного регулятора соединен с входом объекта управления, выход которого является первым выходом системы, выход задатчика подключен к второму входу первого блока сравнения, модель объекта управления, третий блок сравнения и блок расчета параметров модели объекта, вход которого соединен с выходом операторного регулятора, выход блока расчета параметров модели подключен к второму выходу системы идентификации объекта управления и соединен с первым входом модели объекта управления, второй и третий входы которой соединены, соответственно, с входом и выходом объекта управления; первый, второй и третий выходы модели объекта управления подключены, соответственно, к первому входу третьего блока сравнения, к второму и третьему входам операторного регулятора, второй вход третьего блока сравнения соединен с выходом объекта управления, а выход третьего блока сравнения подключен к второму входу блока формирования свойств ошибки регулирования.
Недостатком этих систем является их низкая функциональная возможность, так как они не предназначены для выполнения функции идентификации нестационарных, сложных динамических объектов управления, то есть оценивания структуры и параметров их математических моделей.
Задача изобретения - расширение функциональных возможностей системы за счет оперативного оценивания параметров модели нестационарного объекта, функционирующего в замкнутом контуре управления, путем включения в контур идентификации трех блоков масштабирования времени, блока расчета момента подачи управления, блока исполнения и ключа.
Задача достигается тем, что в систему управления, содержащую первый задатчик, блок расчета параметров модели объекта, последовательно соединенный объект управления, первый блок сравнения, координатный регулятор, последовательно соединенный второй задатчик, второй блок сравнения, операторный регулятор, первый выход координатного регулятора соединен с входом объекта управления, выход которого является первым выходом системы, выход первого задатчика подключен к второму входу первого блока сравнения, второй выход координатного регулятора соединен со вторым входом модели объекта управления, третий вход модели объекта управления соединен с выходом объекта управления, первый выход модели объекта управления подключен к первому входу третьего блока сравнения, второй вход которого связан с выходом объекта управления, а выход подключен к второму входу второго блока сравнения и к входу второго задатчика, второй и третий выходы модели объекта управления подключены, соответственно, к второму и третьему входу операторного регулятора, введены первый, второй и третий блоки масштабирования времени, ключ, блок расчета момента подачи управления и блок исполнения, вход блока расчета момента подачи управления соединен со вторым выходом блока расчета параметров модели, первый выход которого соединен со вторым выходом системы управления и третьим входом второго блока масштабирования времени, а выход блока расчета момента подачи управления соединен со вторым входом первого блока масштабирования времени и первым входом второго блока масштабирования времени, вход блока исполнения, вырабатывающий управляющие воздействия, соединен с третьим выходом блока расчета параметров модели, а выход соединен с первым входом первого блока масштабирования времени и вторым входом второго блока масштабирования времени, первый и второй выходы первого блока масштабирования времени соединены со вторым и третьим входами координатного регулятора, первый, второй и третий выходы второго блока масштабирования времени, соответственно, соединены с первым, четвертым и пятым входами модели объекта управления, первый и второй входы блока расчета параметров модели соединены, соответственно, с первым и вторым выходами третьего блока масштабирования времени, первый и второй входы которого соединены со вторым и третьим выходами ключа, определяющего момент выполнения расчета параметров модели, первый и второй входы которого соединены с первым и вторым выходами оперативного регулятора.
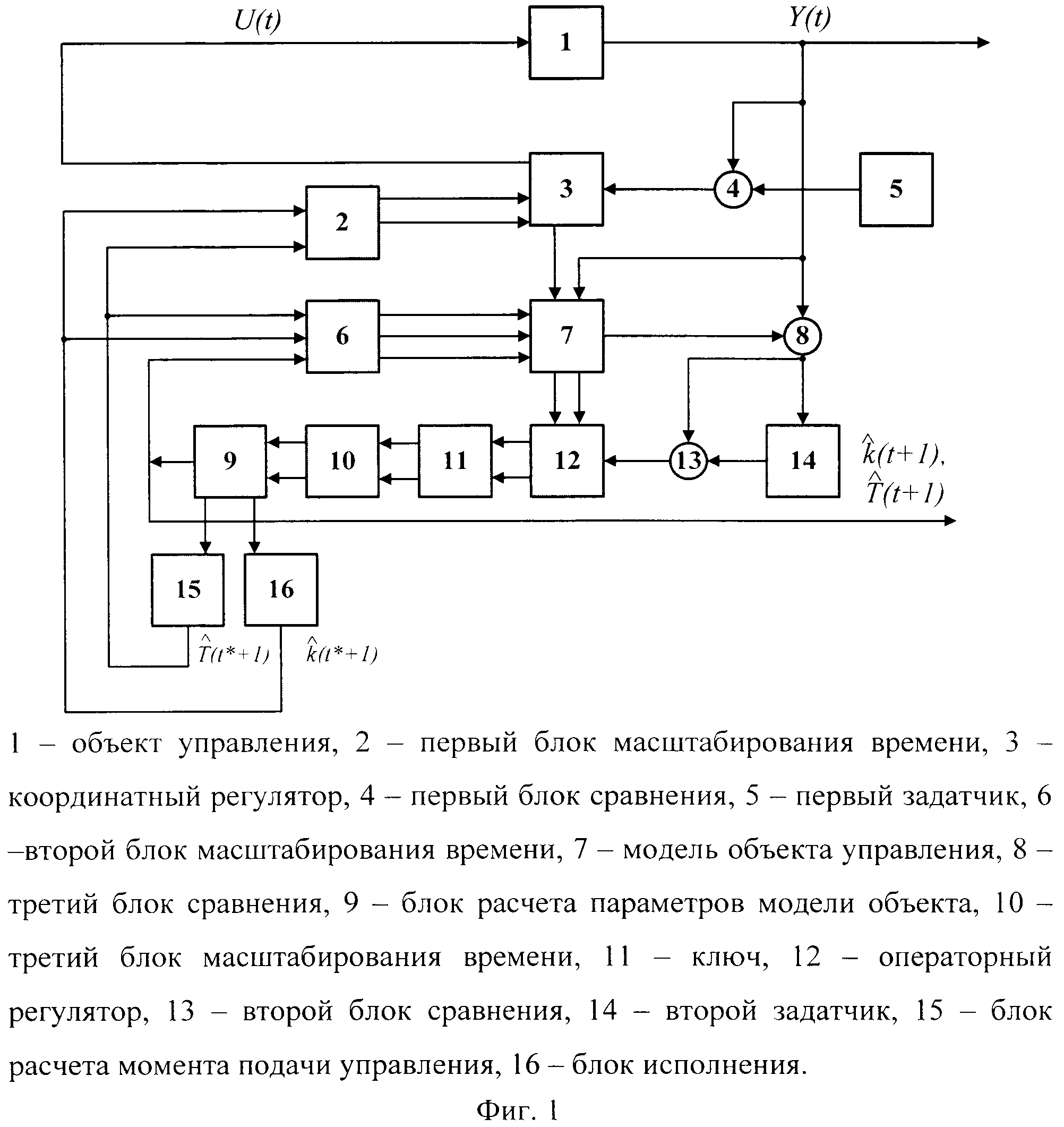
На фиг. 1 приведена блок-схема системы управления. На фигуре приведены следующие обозначения:
U(t) - сигнал об управляющем воздействии;
Y(t) - сигнал о выходном воздействии объекта управления;
 - сигнал об оценках коэффициента модели объекта управления;
- сигнал об оценках коэффициента модели объекта управления;
 - сигнал об оценках постоянной времени модели объекта управления;
- сигнал об оценках постоянной времени модели объекта управления;
t, t* - непрерывное время.
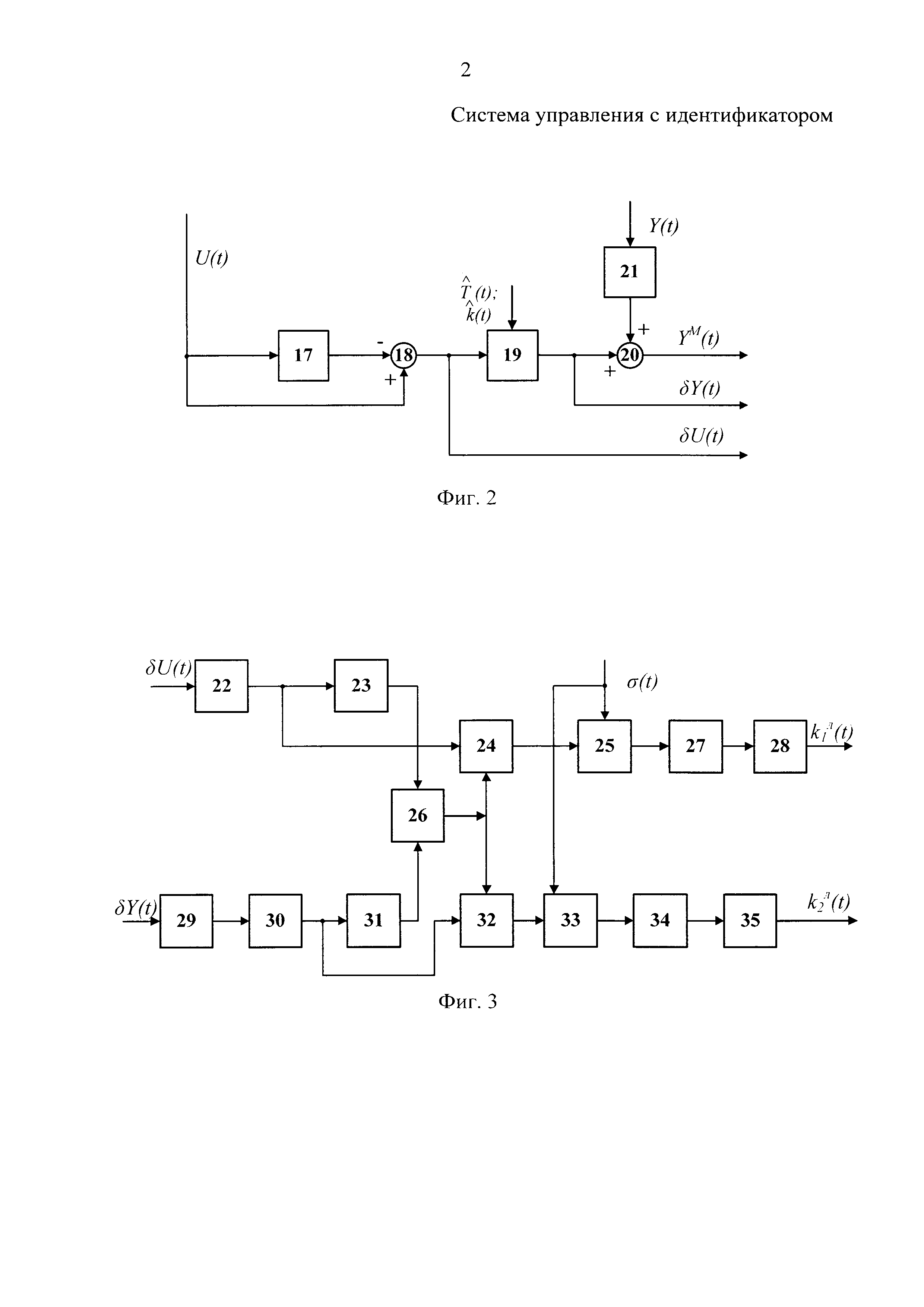
На фиг. 2 представлена блок-схема модели объекта управления, которая является одним из вариантов реализации модели объекта управления. На фиг. 2 приведены следующие обозначения:
YM(t) - сигнал о выходном воздействии модели объекта управления;
δU(t) - разность сигналов U(t) и U(t-τ);
δY(t) - сигнал о выходном воздействии модели объекта управления в приращениях.
На фиг. 3 приведен пример блок-схемы операторного регулятора, реализующего закон функционирования (16), (17), (10), (11). На фиг. 3 приведены следующие обозначения:
σ(t) - сигнал об отклонении ошибки модели объекта εy(t) от задания ε* y(t) на свойства ошибки операторного регулирования;
 ;
;  - сигнал о текущих оценках коэффициентов линейно-параметрической модели (9).
- сигнал о текущих оценках коэффициентов линейно-параметрической модели (9).
Система управления динамическими объектами с их идентификацией содержит объект управления 1, первый блок масштабирования времени 2, координатный регулятор 3, первый блок сравнения 4, первый задатчик 5, второй блок масштабирования времени 6, модель объекта управления 7, третий блок сравнения 8, блок расчета параметров модели объекта 9, третий блок масштабирования времени 10, ключ 11, операторный регулятор 12, второй блок сравнения 13, второй задатчик 14, блок расчета момента подачи управления 15, блок исполнения 16.
Модель 7 объекта управления содержит первый блок 17 задержки, четвертый блок 18 сравнения, модель 19 объекта в приращениях, пятый блок 20 сравнения, второй блок 21 задержки.
Операторный регулятор 12 содержит первый блок 22 переопределения сигнала, первый блок 23 возведения в квадрат, первый блок 24 деления, первый блок 25 умножения, сумматор 26, первый блок 27 интегрирования, первый масштабирующий блок 28, блок 29 дифференцирования, второй блок 30 переопределения сигнала, второй блок 31 возведения в квадрат, второй блок 32 деления, второй блок 33 умножения, второй блок 34 интегрирования и второй масштабирующий блок 35.
Система управления динамическими объектами управления с их идентификацией работает следующим образом. Сигнал Y(t) о выходном воздействии объекта управления 1 поступает по первому входу в первый блок 4 сравнения, где он сравнивается с сигналом Y*(t) о задании на выходную переменную объекта 1, который поступает с выхода задатчика 5 на второй вход первого блока 4 сравнения. Выходной сигнал  первого блока 4 сравнения поступает через первый вход в координатный регулятор 3, на выходе которого появляется сигнал U(t) об управляющем воздействии, вырабатываемый в соответствии с алгоритмом
первого блока 4 сравнения поступает через первый вход в координатный регулятор 3, на выходе которого появляется сигнал U(t) об управляющем воздействии, вырабатываемый в соответствии с алгоритмом  координатного регулирования
координатного регулирования

Сигнал U(t) со второго выхода координатного регулятора 3 подается на второй вход модели 7 объекта управления и на первый вход объекта управления 1, где он обеспечивает с требуемой точностью компенсацию отклонений сигналов Y(t) от Y*(t). Одновременно с сигналом U(t) на третий вход модели 7 объекта управления подается сигнал Y(t), с использованием которого осуществляется расчет сигнала YM(t) о выходном воздействии модели 7 объекта управления.
Функционирование модели 7 объекта управления осуществляется следующим образом. Сигнал U(t) с выхода координатного регулятора 3 задерживается в первом блоке 17 задержки на время задержки τ и вычитается из сигнала U(t). Полученная разность сигналов δU(t) поступает на первый вход модели 19 объекта в приращениях, на второй вход которой подается с выхода блока 6 масштабирования времени сигнал о текущих значениях оценок ее коэффициентов  ,
,  . Сигнал δY(t) с выхода модели 19 объекта в приращениях, характеризующий ее реакцию на приращение δU(t), суммируется в пятом блоке 20 сравнения с предварительно задержанным на время τ во втором блоке 21 задержки выходным сигналом Y(t-τ) объекта управления 1, формируя на первом выходе модели 7 объекта управления сигнал YM(t).
. Сигнал δY(t) с выхода модели 19 объекта в приращениях, характеризующий ее реакцию на приращение δU(t), суммируется в пятом блоке 20 сравнения с предварительно задержанным на время τ во втором блоке 21 задержки выходным сигналом Y(t-τ) объекта управления 1, формируя на первом выходе модели 7 объекта управления сигнал YM(t).
Закон функционирования модели 7 объекта управления в общем виде представлен следующими выражениями





где τ - время задержки сигналов U(t) и Y(t);
 - оператор задержки сигналов на время τ;
- оператор задержки сигналов на время τ;
 - оператор модели объекта в приращениях;
- оператор модели объекта в приращениях;
 ;
;  - коэффициенты модели объекта в приращениях.
- коэффициенты модели объекта в приращениях.
В частности, модель (4), в том числе и нелинейная, может быть представлена в удобной для идентификации линейно-параметрической форме

где  ;
;  - коэффициенты линейно-параметрической модели объекта в приращениях;
- коэффициенты линейно-параметрической модели объекта в приращениях;
JЛ - число коэффициентов линейно-параметрической модели.
Например, если модель 19 объекта в приращениях представлена в виде линейного дифференциального уравнения первого порядка

где T(t), k(t) - текущие значения оценок параметров модели в приращениях: постоянной времени и коэффициента передачи, соответственно, которые являются составляющими сигнала kj(t), то выражение (7) будет иметь вид



Сигнал YM(t) с первого выхода модели 7 объекта управления поступает по первому входу в третий блок 8 сравнения, где он вычитается из сигнала Y(t), поступающего по второму входу третьего блока 8 сравнения с выхода объекта управления 1. Выходной сигнал εy(t) третьего блока сравнения 8, пропорциональный разнице сигналов с выхода объекта управления 1 Y(t) и с первого выхода модели 7 объекта управления YM(t), то есть

поступает по второму входу во второй блок 13 сравнения и на вход блока второго задатчика 14, в котором реализуется оператор  , отражающий в общем виде задания на свойства ошибок операторного регулирования.
, отражающий в общем виде задания на свойства ошибок операторного регулирования.
Как вариант, это задание может быть связано с характером переходного процесса ошибки εy(t), и, в частности, выражено с помощью соотношения следующего вида

где α - постоянный коэффициент.
Сигнал ε* y(t) поступает по первому входу во второй блок 13 сравнения, где он сравнивается с сигналом εy(t), вырабатывая на выходе второго блока 13 сравнения сигнал

который поступает на первый вход операторного регулятора 12, на второй и третий входы которого поступают сигналы  и
и  , соответственного, со второго и третьего выходов модели объекта управления 7.
, соответственного, со второго и третьего выходов модели объекта управления 7.
Закон функционирования операторного регулятора 12, реализующий функции параметрического регулятора, в общем виде представлен с помощью следующих выражений

где,  - оператор текущего оценивания коэффициентов модели в приращениях.
- оператор текущего оценивания коэффициентов модели в приращениях.
Если модель 19 объекта в приращениях представлена в виде выражения (9), то выражение (15) примет следующий вид
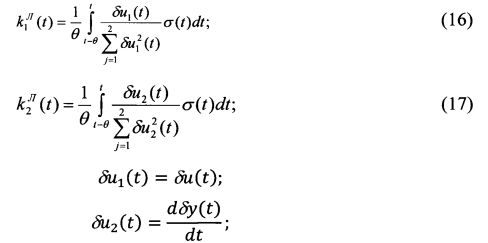
где θ - интервал интегрирования.
Функционирование операторного регулятора 12 осуществляется следующим образом. Сигнал  с третьего выхода модели объекта управления поступает по третьему входу операторного регулятора в первый блок 22 переопределения сигнала и, после преобразования в соответствии с выражением (10) в сигнал
с третьего выхода модели объекта управления поступает по третьему входу операторного регулятора в первый блок 22 переопределения сигнала и, после преобразования в соответствии с выражением (10) в сигнал  , поступает в первый блок 23 возведения в квадрат, формируя на его выходе сигнал, пропорциональный значению
, поступает в первый блок 23 возведения в квадрат, формируя на его выходе сигнал, пропорциональный значению  , который по первому входу поступает в сумматор 26.
, который по первому входу поступает в сумматор 26.
Одновременно с сигналом  сигнал
сигнал  с второго выхода модели 7 объекта управления поступает по второму входу операторного регулятора в блок 29 дифференцирования, на выходе которого формируется сигнал, пропорциональный значению
с второго выхода модели 7 объекта управления поступает по второму входу операторного регулятора в блок 29 дифференцирования, на выходе которого формируется сигнал, пропорциональный значению  , который, поступая во второй блок 30 переопределения сигнала, преобразуется в соответствии с выражением (11) в сигнал
, который, поступая во второй блок 30 переопределения сигнала, преобразуется в соответствии с выражением (11) в сигнал  . Последний, поступая во второй блок 31 возведения в квадрат, формирует на его выходе сигнал, пропорциональный значению
. Последний, поступая во второй блок 31 возведения в квадрат, формирует на его выходе сигнал, пропорциональный значению  , который через второй вход поступает в сумматор 26, где, суммируясь с сигналом
, который через второй вход поступает в сумматор 26, где, суммируясь с сигналом  , вырабатывает на выходе блока 26 сигнал, пропорциональный
, вырабатывает на выходе блока 26 сигнал, пропорциональный  . Этот сигнал по вторым входам поступает в блок 24 и 32 деления, на выходе которых вырабатываются сигналы, пропорциональные значениям
. Этот сигнал по вторым входам поступает в блок 24 и 32 деления, на выходе которых вырабатываются сигналы, пропорциональные значениям  и
и  соответственно.
соответственно.
Одновременно с сигналами  и
и  через первый вход операторного регулятора на вторые входы первого 25 и второго 33 блоков умножения поступает с выхода второго блока сравнения 13 сигнал σ(t), пропорциональный отклонению ошибки модели 7 объекта εy(t) от сигнала ε* y(t) о задании на свойства ошибки регулирования:
через первый вход операторного регулятора на вторые входы первого 25 и второго 33 блоков умножения поступает с выхода второго блока сравнения 13 сигнал σ(t), пропорциональный отклонению ошибки модели 7 объекта εy(t) от сигнала ε* y(t) о задании на свойства ошибки регулирования:

Значения сигнала ε* y(t) определяются в блоке 14 формирования свойств ошибки регулирования. Выходные сигналы блоков 19 и 27 умножения поступают, соответственно, в первый 27 и второй 34 блоки интегрирования, а затем в первый 28 и второй 35 масштабирующие блоки, где умножаются на величину 1/θ.
Таким образом, на выходе первого масштабирующего блока 28 вырабатывается сигнал, пропорциональный текущей оценки коэффициента
что соответствует выражению (16), а на выходе второго масштабирующего блока 35 - сигнал, пропорциональный
что соответствует выражению (17). Эти сигналы, являясь составляющими сигнала  , поступают с выхода операторного регулятора 12 на вход блока - «ключ» (11), который, в зависимости от величины ошибки σ(t), дает команду на запуск второго (t*) цикла расчета (уточнения) параметров модели (7) в котором текущие оценки коэффициентов
, поступают с выхода операторного регулятора 12 на вход блока - «ключ» (11), который, в зависимости от величины ошибки σ(t), дает команду на запуск второго (t*) цикла расчета (уточнения) параметров модели (7) в котором текущие оценки коэффициентов  и
и  линейно-параметрической модели (9) пересчитываются в коэффициенты модели объекта в приращениях (4). В частности, если эта модель представлена выражением (8), то их пересчет осуществляется по выражениям
линейно-параметрической модели (9) пересчитываются в коэффициенты модели объекта в приращениях (4). В частности, если эта модель представлена выражением (8), то их пересчет осуществляется по выражениям

Текущие оценки коэффициентов модели (8), являются частным случаем модели в приращениях (4), поступают как составляющие сигнала  из блока (9) расчета параметров модели 13 объекта в приращениях, как одного из элементов модели объекта управления.
из блока (9) расчета параметров модели 13 объекта в приращениях, как одного из элементов модели объекта управления.
Поскольку идентификация коэффициентов Т и k модели (8) осуществляется в замкнутом контуре, когда объект охвачен обратной связью, возникает необходимость в специальном формировании исходных данных. Процедура формирования таких данных совмещена с процедурой выработки и реализации управляющих воздействий согласно концепции дуального управления. Параллельно с нанесением управляющих воздействий в основном контуре управления (t), реализован вспомогательный контур управления (t*), суть которого заключается в следующем. В момент превышения заданного значения величиной σ(t) (15), ключ 11 дает команду на уточнение параметров модели (8) объекта управления. С учетом известных оценок коэффициентов (T и k) в блоке 15 осуществляется расчет момента подачи управляющего воздействия по формулам (20) и (21), нанесение в заданный момент времени t* управляющего воздействия ступенчатого типа (22) и фиксация его на интервале времени переходного процесса от этого воздействия.
где t* - момент времени окончания переходного процесса от ступенчатого изменения  на предыдущем (t*-1) такте управления.
на предыдущем (t*-1) такте управления.
Регистрация на интервале времени переходного процесса данных об управляющем  и выходном
и выходном  воздействии объекта управления и расчет по этим данным коэффициентов Т и k модели (8), расчет величины управляющего воздействия с использованием полученных оценок Т и k и реализация на следующем интервале переходного процесса, величина которого определяется также с использованием новых оценок коэффициентов Т и k модели (8).
воздействии объекта управления и расчет по этим данным коэффициентов Т и k модели (8), расчет величины управляющего воздействия с использованием полученных оценок Т и k и реализация на следующем интервале переходного процесса, величина которого определяется также с использованием новых оценок коэффициентов Т и k модели (8).
Тем самым обеспечивается своевременная корректировка оценок коэффициентов модели объекта управления.
Расширение функциональных возможностей системы управления и идентификации объекта, т.е. оценивание параметров модели нестационарного объекта, функционирующего в замкнутом контуре управления, достигается путем введения в контур идентификации новых блоков и связей включающих: первый, второй и третий блоки масштабирования времени, блок расчета момента подачи управления, блок исполнения и ключа. Это дает возможность использовать предложенную систему для идентификации линейных и нелинейных динамических объектов управления в замкнутом контуре, модели которых можно привести к линейно-параметрической форме.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. Емельянов С.В., Коровин С.К. Новые типы обратной связи: Управление при неопределенности. - М.: Наука. Физматлит, 1997. - с 143, рис. 3.16.
2. Патент РФ №2486563, заявл. 2012 г. МПК8 G05B 13/04.
Система управления динамическими объектами управления с их идентификацией, содержащая первый задатчик, блок расчета параметров модели объекта, последовательно соединенный объект управления, первый блок сравнения, координатный регулятор, последовательно соединенный второй задатчик, второй блок сравнения, операторный регулятор, первый выход координатного регулятора соединен с входом объекта управления, выход которого является первым выходом системы, выход первого задатчика подключен к второму входу первого блока сравнения, второй выход координатного регулятора соединен со вторым входом модели объекта управления, третий вход модели объекта управления соединен с выходом объекта управления, первый выход модели объекта управления подключен к первому входу третьего блока сравнения, второй вход которого связан с выходом объекта управления, а выход подключен к второму входу второго блока сравнения и к входу второго задатчика, второй и третий выходы модели объекта управления подключены, соответственно, к второму и третьему входу операторного регулятора, отличающаяся тем, что в нее введены первый, второй и третий блоки масштабирования времени, ключ, блок расчета момента подачи управления и блок исполнения, вход блока расчета момента подачи управления соединен со вторым выходом блока расчета параметров модели, первый выход которого соединен со вторым выходом системы управления и третьим входом второго блока масштабирования времени, а выход блока расчета момента подачи управления соединен со вторым входом первого блока масштабирования времени и первым входом второго блока масштабирования времени, вход блока исполнения, вырабатывающий управляющие воздействия, соединен с третьим выходом блока расчета параметров модели, а выход соединен с первым входом первого блока масштабирования времени и вторым входом второго блока масштабирования времени, первый и второй выходы первого блока масштабирования времени соединены со вторым и третьим входами координатного регулятора, первый, второй и третий выходы второго блока масштабирования времени, соответственно, соединены с первым, четвертым и пятым входами модели объекта управления, первый и второй входы блока расчета параметров модели соединены, соответственно, с первым и вторым выходами третьего блока масштабирования времени, первый и второй входы которого соединены со вторым и третьим выходами ключа, определяющего момент выполнения расчета параметров модели, первый и второй входы которого соединены с первым и вторым выходами оперативного регулятора.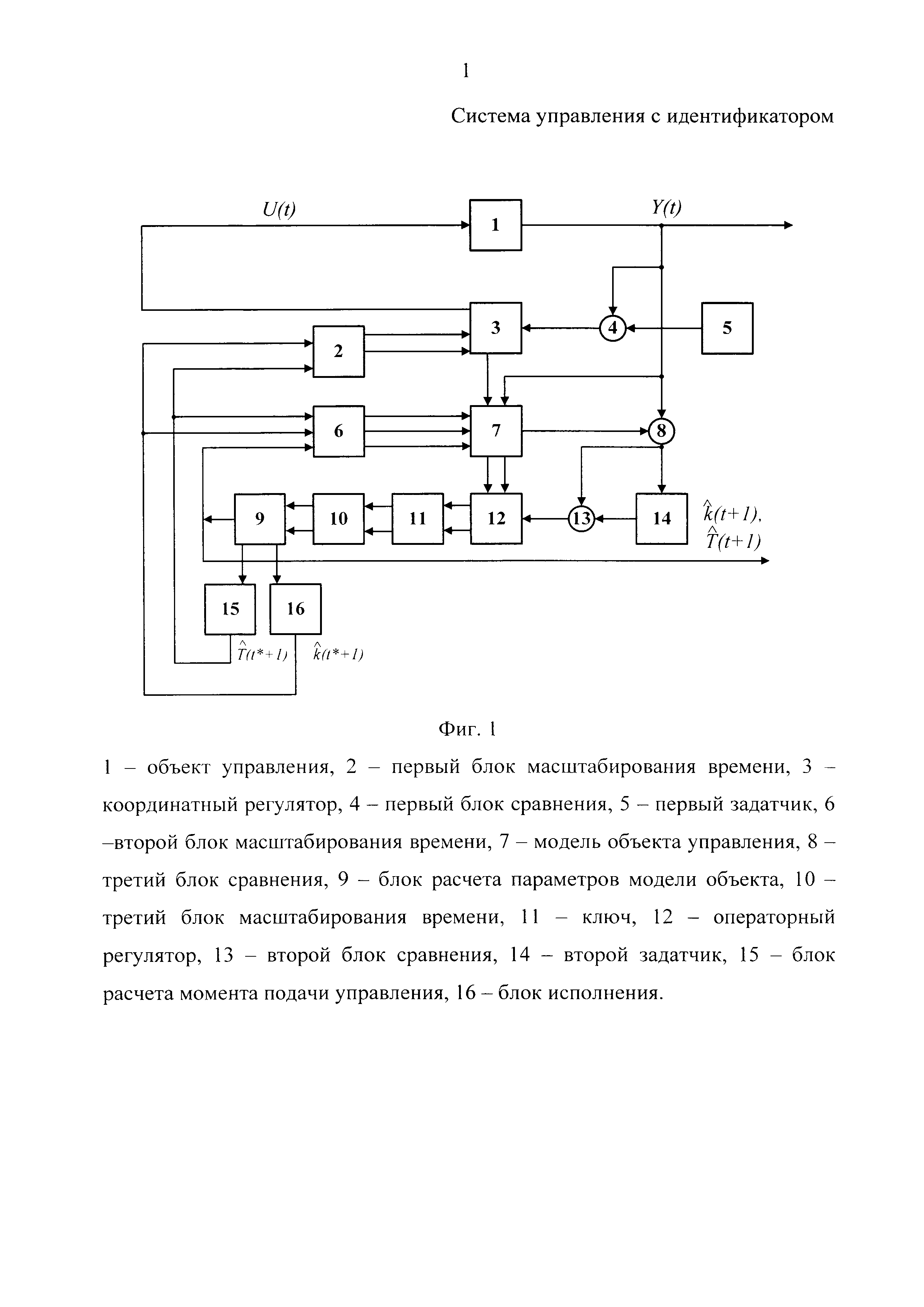
Способ нанесения износостойких покрытий на основе диборида титана и молибдена на стальные поверхности
Самоустанавливающаяся четырёхсателлитная планетарная передача
Способ химического обогащения полиметаллических марганецсодержащих руд
Трёхзвенное кинематическое соединение (трекс) с восьмью относительными движениями
Рекуперирующий электропривод переменного тока с двухзвенным преобразователем частоты
Пространственный механизм с четырёхподвижным приводом
Пространственный четырёхзвенный винто-рычажный механизм
Самоустанавливающийся шатун
Способ прокатки рельсов
Способ определения оптимальных параметров давления прессования и влажности пресс-порошка для получения стеновых керамических материалов
Радиальный подшипник жидкостоного трения
Система регулирования объекта с рециклом
Пылеугольное топливо для доменной плавки
Теплоизолирующая шлакообразующая смесь
Теплоизолирующая шлакообразующая смесь
Флюс для сварки и наплавки
Флюс для сварки и наплавки
Устройство органичения грузоподъемности мостового крана
Устройство защиты гидротурбины от выхода из строя опорного подшипника
Щековая дробилка с защитой от поломок и автоматическим пропуском материала высокой прочности через камеру дробления

