Результат интеллектуальной деятельности: СПОСОБ ФОРМИРОВАНИЯ УПРАВЛЯЮЩИХ СИГНАЛОВ ВКЛЮЧЕНИЯ ДВИГАТЕЛЬНОЙ УСТАНОВКИ КОСМИЧЕСКОГО БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА ПРИ ВЫПОЛНЕНИИ ИМ ПРОСТРАНСТВЕННОГО МАНЕВРА НА БАЛЛИСТИЧЕСКОМ УЧАСТКЕ ТРАЕКТОРИИ ПОЛЕТА
Вид РИД
Изобретение
Изобретение относится к области систем управления и стабилизации траектории полета беспилотных летательных аппаратов и может быть использовано для формирования управляющих команд включения двигательных установок космического беспилотного летательного аппарата при выполнении им пространственного уклоняющего маневра на баллистическом участке траектории полета.
Из уровня техники известен способ управления и стабилизации траектории полета беспилотного летательного аппарата путем уменьшения вероятности его поражения средствами противовоздушной обороны, которое характеризуется тем, что изменяют случайным образом вектор тяги реактивной двигательной установки в интервалы времени полета летательного аппарата на участках траектории, где возможен обстрел средствами ПВО противника [Патент RU 2095737, МПК F42B 10/00, B64C 19/00, 1995]. За счет упреждающего уклоняющего маневра беспилотного летательного аппарата по случайной спиралеобразной траектории затрудняется возможность экстраполяции параметров траектории его движения, что уменьшает вероятность поражения беспилотного летательного аппарата средствами ПВО.
Недостаток известного способа уменьшения вероятности поражения летательного аппарата средствами противовоздушной обороны состоит в том, что при выполнении маскирующих маневренных движений беспилотного летательного аппарата по случайной траектории сохраняются демаскирующие признаки работы реактивной двигательной установки этого беспилотного летательного аппарата и требуется большой расход топлива. Вычислительные возможности современных ЭВМ, входящих в состав средств ПВО, могут обеспечить условия успешного прогнозирования траектории полета беспилотного летательного аппарата и его уничтожить.
Наиболее близким к заявляемому известным техническим решением в качестве прототипа является способ управления летательным аппаратом, который характеризуется тем, что запоминают электронно-цифровое полетное задание, содержащее значения расчетных кинематических параметров движения космического беспилотного летательного аппарата в момент его отделения от последней ступени ракеты-носителя и их частных производных, расчетное время включения корректирующего двигателя, значения допустимых смещений по дальности, боковому отклонению и высоте точки прицеливания космического беспилотного летательного аппарата при его маневре, расчетные характеристики тяги корректирующего двигателя и массы космического беспилотного летательного аппарата до момента старта многоступенчатой ракеты-носителя, измеряют кинематические параметры активного участка траектории полета многоступенчатой ракеты-носителя, подверженной воздействию внутренних и/или внешних возмущений, после ее старта, формируют управляющий сигнал программного разворота по углу тангажа, формируют управляющие сигналы включения и выключения ракетных двигателей для разделения и сброса отработанных ступеней многоступенчатой ракеты-носителя, сравнивают измеренные кинематические параметры активного участка траектории полета многоступенчатой ракеты-носителя с заранее заданными, отрабатывают ракетными двигателями многоступенчатой ракеты-носителя возможное рассогласование между измеренными кинематическими параметрами активного участка траектории полета и заранее заданными кинематическими параметрами в направлении его уменьшения до нулевого значения, запоминают измеренные кинематические параметры в конце активного участка траектории полета каждой ступени многоступенчатой ракеты-носителя, задерживают включение ракетного двигателя очередной ступени многоступенчатой ракеты-носителя на интервал времени, длительность которого задана с учетом ранее запомненных измеренных кинематических параметров в конце активного участка траектории полета предыдущей ступени многоступенчатой ракеты-носителя [Патент RU 105882, МПК B64C 19/00, 2011]. Выполнение перечисленных действия обеспечивает повышение разведывательной защищенности полета космического беспилотного летательного аппарата на активном участке траектории его полета за счет повышения маневренности многоступенчатой ракеты-носителя в интервалах времени разделения ее ступеней, когда отключаются ее реактивные двигатели и пропадают демаскирующие инфракрасные пятна на экранах средств космического наблюдения противоракетной обороны противника.
Недостаток прототипа состоит в том, что полет космического беспилотного летательного аппарата многоступенчатой ракеты-носителя на баллистическом участке траектории его полета после отделения от многоступенчатой ракеты-носителя происходит в условиях возможной экстраполяции траектории его дальнейшего полета средствами противоракетной обороны противника с последующей вероятностью уничтожения космического беспилотного летательного аппарата.
Технической задачей изобретения является повышение разведывательной защищенности полета космического беспилотного летательного аппарата на баллистическом участке траектории его полета после отделения от последней ступени ракеты-носителя.
Технический результат изобретения состоит в том, что повышается маневренность космического беспилотного летательного аппарата на баллистическом участке траектории его полета, которая позволяет увеличить неопределенность его места нахождения и защитить от прицельного удара огневых средств поражения противоракетной обороны противника.
Сущность изобретения заключается в том, что кроме известных и общих существенных отличительных действий, которые характеризуются тем, что запоминают до момента старта многоступенчатой ракеты-носителя электронно-цифровое полетное задание, содержащее значения расчетных кинематических параметров движения космического беспилотного летательного аппарата в момент его отделения от последней ступени ракеты-носителя и их частных производных, расчетное время включения корректирующего двигателя, значения допустимых смещений по дальности, боковому отклонению и высоте точки прицеливания космического беспилотного летательного аппарата при его маневре, расчетные характеристики тяги корректирующего двигателя и массы космического беспилотного летательного аппарата, измеряют кинематические параметры активного участка траектории полета последней ступени многоступенчатой ракеты-носителя, подверженной воздействию внутренних и/или внешних возмущений, и запоминают измеренные параметры активного участка траектории полета последней ступени многоступенчатой ракеты-носителя, предлагаемый способ формирования управляющих сигналов включения двигательной установки космического беспилотного летательного аппарата при выполнении им пространственного маневра на баллистическом участке траектории полета характеризуется тем, что в момент формирования управляющего сигнала отделения космического беспилотного летательного аппарата от последней ступени ракеты-носителя измеряют и запоминают кинематические параметры движения центра масс космического беспилотного летательного аппарата и время момента формирования управляющего сигнала отделения космического беспилотного летательного аппарата от последней ступени ракеты-носителя, сравнивают измеренные значения кинематических параметров движения центра масс космического беспилотного летательного аппарата с расчетными значениями полетного задания, отрабатывают сигнал возможного рассогласования между измеренными и заданными в полетном задании кинематическими параметрами движения центра массы космического беспилотного летательного аппарата в сторону его уменьшения до нулевого значения и формируют управляющий сигнал полетного задания включения корректирующего двигателя космического беспилотного летательного аппарата для выполнения уклоняющего маневра.
Новизна изобретения состоит в том, что в момент формирования управляющего сигнала отделения космического беспилотного летательного аппарата от последней ступени ракеты-носителя измеряют и запоминают кинематические параметры движения центра масс космического беспилотного летательного аппарата и время момента формирования управляющего сигнала отделения космического беспилотного летательного аппарата от последней ступени ракеты-носителя, сравнивают измеренные значения кинематических параметров движения центра масс космического беспилотного летательного аппарата с расчетными значениями полетного задания, отрабатывают сигнал возможного рассогласования между измеренными и заданными в полетном задании кинематическими параметрами движения центра массы космического беспилотного летательного аппарата в сторону его уменьшения до нулевого значения и формируют управляющий сигнал полетного задания включения корректирующего двигателя космического беспилотного летательного аппарата для выполнения уклоняющего маневра, что обеспечивает повышение маневренности космического беспилотного летательного аппарата на баллистическом участке траектории его полета за счет формирования управляющего сигнала включения корректирующего двигателя космического беспилотного летательного аппарата.
Функциональная схема примера технической реализации предлагаемого способа формирования управляющего сигнала включения двигательной установки космического беспилотного летательного аппарата при выполнении им пространственного маневра на баллистическом участке траектории полета приведена на чертеже, где обозначено: 1 - приборный отсек космического беспилотного летательного аппарата с системой управления (система управления); 2 - бортовая цифровая вычислительная машина (БЦВМ); 3 - блок хранения полетного задания; 4 - система угловой стабилизации космического беспилотного летательного аппарата (система угловой стабилизации); 5 - корректирующий двигатель.
Предлагаемый способ формирования управляющего сигнала включения двигательной установки космического беспилотного летательного аппарата при выполнении им пространственного маневра на баллистическом участке траектории полета реализуется следующим образом.
Известные действия заблаговременного, то есть до момента старта многоступенчатой ракеты-носителя, запоминания электронно-цифрового полетного задания реализуются с помощью блока 3 хранения полетного задания, которое содержит:
- значения расчетных кинематических параметров движения космического беспилотного летательного аппарата в момент его отделения от последней ступени ракеты-носителя и их частных производных по координатам X, Y и Z:

по скоростям:

- расчетное время включения корректирующего двигателя по истечении момента времени формирования управляющего сигнала (главной команды) отделения космического беспилотного летательного аппарата от последней ступени ракеты-носителя

С помощью выражения (3) определяют временную поправку включения корректирующего двигателя 5 космического беспилотного летательного аппарата, обеспечивающую компенсацию негативного воздействия внешних и/или внутренних возмущений полета многоступенчатой ракеты-носителя, а именно:

Время включения корректирующего двигателя 5 космического беспилотного летательного аппарата будет равно

где Δq,  - отклонения кинематических параметров движения центра масс космического беспилотного летательного аппарата от их расчетных значений в момент времени выдачи управляющего сигнала на отделение космического беспилотного летательного аппарата от последней ступени ракеты-носителя;
- отклонения кинематических параметров движения центра масс космического беспилотного летательного аппарата от их расчетных значений в момент времени выдачи управляющего сигнала на отделение космического беспилотного летательного аппарата от последней ступени ракеты-носителя;
Δτi - отклонение момента времени включения корректирующего двигателя космического беспилотного летательного аппарата от его расчетного значения tp;
 ,
,  - частные производные функции времени включения корректирующего двигателя космического беспилотного летательного аппарата по координатам и скоростям движения центра масс соответственно;
- частные производные функции времени включения корректирующего двигателя космического беспилотного летательного аппарата по координатам и скоростям движения центра масс соответственно;
 - частная производная функции времени включения корректирующего двигателя космического беспилотного летательного аппарата по времени выдачи главной команды.
- частная производная функции времени включения корректирующего двигателя космического беспилотного летательного аппарата по времени выдачи главной команды.
Определение всех частных баллистических производных в выражении (4) производится методом интегрирования полной нелинейной системы дифференциальных уравнений движения космического беспилотного летательного аппарата при подготовке полетного задания.
Кроме того, в блок 3 хранения полетного задания загружают значения допустимых смещений по дальности ΔL, боковому отклонению ΔZ и высоте ΔH точки прицеливания космического беспилотного летательного аппарата при его маневре, а также расчетные характеристики тяги Р корректирующего двигателя и массы m космического беспилотного летательного аппарата.
Далее, после ввода полетного задания в блок 3 хранения полетного задания и старта баллистической ракеты выполняют известные действия с помощью инерциальных измерительных элементов системы управления 1, связанные с измерением кинематических параметров активного участка траектории полета последней ступени многоступенчатой ракеты-носителя, подверженной воздействию внутренних и/или внешних возмущений, и запоминают измеренные параметры активного участка траектории полета последней ступени многоступенчатой ракеты-носителя в блоках памяти БЦВМ.
Начиная с момента времени формирования управляющего сигнала на отделение космического беспилотного летательного аппарата от последней ступени ракеты-носителя измеряют с помощью вышеуказанных измерительных элементов системы управления 1 космического беспилотного летательного аппарата и запоминают с помощью блоков памяти БЦВМ измеренные кинематические параметры движения центра масс космического беспилотного летательного аппарата. Кроме того, с помощью блоков памяти БЦВМ запоминают время момента формирования управляющего сигнала на отделение космического беспилотного летательного аппарата от последней ступени ракеты-носителя.
Далее сравнивают измеренные измерительными элементами системы управления 1 значения кинематических параметров движения центра масс космического беспилотного летательного аппарата с расчетными значениями, хранящимися в блоке 3 хранения полетного задания. В результате этого сравнения возможно появление сигнала рассогласования между измеренными и заданными в полетном задании кинематическими параметрами движения центра массы космического беспилотного летательного аппарата, который отрабатывают двигательной установкой 5 в сторону его уменьшения до нулевого значения.
При этом формирование управляющего сигнала для отработки сигнала рассогласования осуществляется с учетом допустимых значений скоростей по осям прямоугольной системы координат ΔL, ΔZ и ΔН точки прицельного падения космического беспилотного летательного аппарата 
Здесь
 ,
,  ,
,  - частные баллистические производные изменения скорости;
- частные баллистические производные изменения скорости;
ΔWα, ΔWβ, ΔWγ - допустимые значения кажущихся скоростей по направлениям α, β и γ прямоугольной системы координат, обеспечивающие требуемый уклоняющий маневр.
При выполнении бокового уклоняющего маневра космического беспилотного летательного аппарата необходимая скорость для этого маневра будет равна:

Угол направления продольной оси X космического беспилотного летательного аппарата определяется с помощью выражения

т.е. 
При выполнении пространственного уклоняющего маневра космическим беспилотным летательным аппаратом радиус-вектор направления положения точки его падения будет равен

а направление продольной оси космического беспилотного летательного аппарата при этом будет равно 
Угловая стабилизация космического беспилотного летательного аппарата реализуется с помощью системы угловой стабилизации 4, исполнительным элементом которой является корректирующий двигатель 5.
Завершающим этапом предлагаемой последовательности действий является формирование с помощью БЦВМ управляющего сигнала согласно полетному заданию, хранящемуся в блоке 3 хранения полетного задания, включения корректирующего двигателя 5 для выполнения уклоняющего маневра космическим беспилотным летательным аппаратом.
Согласно теореме об реактивных импульсах [Технические основы эффективности ракетных систем / Под ред. Е.Б. Волкова. М.: Машиностроение, 1990. - 253 с.] с помощью БЦВМ определяют вектор реактивной тяги из уравнения:

где Р - реактивная тяга корректирующего двигателя 5,
m - масса космического беспилотного летательного аппарата.
С помощью выражения (12) БЦВМ рассчитывает время работы корректирующего двигателя 5, которое обеспечивает получение допустимой заданной скорости для выполнения уклоняющего маневра

Выполнение уклоняющих маневренных действий позволяет затруднить экстраполяцию траектории полета маневрирующего космического беспилотного летательного аппарата средствами ПВО и ПРО противника. С помощью системы 4 угловой стабилизации отрабатываются к моменту включения корректирующего двигателя 5 управляющие сигналы, пропорциональные угловому положению космического беспилотного летательного аппарата, и в момент  (5) включается корректирующий двигатель 5, время работы которого пропорционально ΔτM (13).
(5) включается корректирующий двигатель 5, время работы которого пропорционально ΔτM (13).
Промышленная осуществимость изобретения обосновывается тем, что в нем использованы известные в аналоге и прототипе узлы и блоки по своему прямому функциональному назначению. В организации-заявителе разработана модель технической реализации заявленного способа формирования управляющих сигналов включения двигательной установки космического беспилотного летательного аппарата при выполнении им пространственного маневра на баллистическом участке траектории его полета в 2015 году.
Положительный эффект от использования изобретения состоит в том, что повышается не менее чем на 20…30% разведывательная защищенность полета космического беспилотного летательного аппарата на баллистическом участке траектории его полета за счет повышения маневренности этого космического беспилотного летательного аппарата после его отделения от последней ступени ракеты-носителя.
Способ формирования управляющих сигналов включения двигательной установки космического беспилотного летательного аппарата при выполнении им пространственного маневра на баллистическом участке траектории полета, характеризующийся тем, что запоминают до момента старта многоступенчатой ракеты-носителя электронно-цифровое полетное задание, содержащее значения расчетных кинематических параметров движения космического беспилотного летательного аппарата в момент его отделения от последней ступени ракеты-носителя и их частных производных, расчетное время включения корректирующего двигателя, значения допустимых смещений по дальности, боковому отклонению и высоте точки прицеливания космического беспилотного летательного аппарата при его маневре, расчетные характеристики тяги корректирующего двигателя и массы космического беспилотного летательного аппарата, измеряют кинематические параметры активного участка траектории полета последней ступени многоступенчатой ракеты-носителя, подверженной воздействию внутренних и/или внешних возмущений, и запоминают измеренные параметры активного участка траектории полета последней ступени многоступенчатой ракеты-носителя, отличающийся тем, что в момент формирования управляющего сигнала отделения космического беспилотного летательного аппарата от последней ступени ракеты-носителя измеряют и запоминают кинематические параметры движения центра масс космического беспилотного летательного аппарата и время момента формирования управляющего сигнала отделения космического беспилотного летательного аппарата от последней ступени ракеты-носителя, сравнивают измеренные значения кинематических параметров движения центра масс космического беспилотного летательного аппарата с расчетными значениями полетного задания, отрабатывают сигнал возможного рассогласования между измеренными и заданными в полетном задании кинематическими параметрами движения центра массы космического беспилотного летательного аппарата в сторону его уменьшения до нулевого значения и формируют управляющий сигнал полетного задания включения корректирующего двигателя космического беспилотного летательного аппарата для выполнения уклоняющего маневра.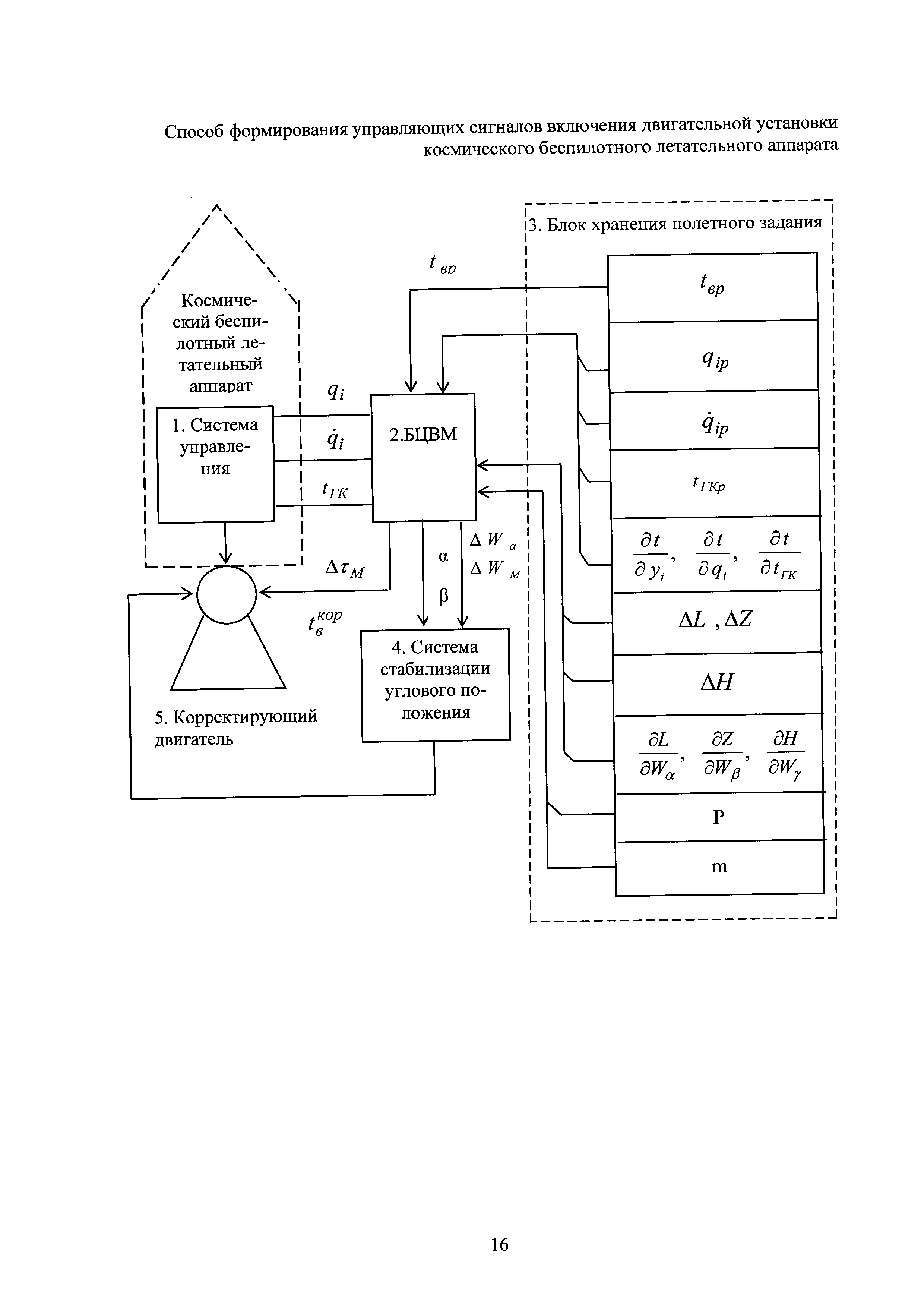
Мажоритарный элемент "6 и более из 11"
Устройство хранения и передачи информации с обнаружением ошибок
Мажоритарный элемент "7 и более из 13"
Устройство хранения и передачи данных с обнаружением ошибок
Средство экстренного уничтожения носителей информации
Ингалятор
Способ обработки и приемник сообщений циркулярных односторонних сетей передачи данных с повторениями
Способ управления пневматическим приводом криогенной арматуры
Устройство хранения и передачи данных с обнаружением одиночных и двойных ошибок
Мажоритарный элемент "5 и более из 9"
Мажоритарный элемент "6 и более из 11"
Устройство хранения и передачи информации с обнаружением ошибок
Мажоритарный элемент "7 и более из 13"
Устройство хранения и передачи данных с обнаружением ошибок
Средство экстренного уничтожения носителей информации
Ингалятор
Способ обработки и приемник сообщений циркулярных односторонних сетей передачи данных с повторениями
Способ получения лиофилизата аминодигидрофталазиндион натрия - лекарственного препарата "тамерон"

