Результат интеллектуальной деятельности: СПОСОБ ОПРЕДЕЛЕНИЯ НЕИСПРАВНОСТЕЙ ГИРОСКОПИЧЕСКОГО ИЗМЕРИТЕЛЯ ВЕКТОРА УГЛОВОЙ СКОРОСТИ КОСМИЧЕСКОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ
Вид РИД
Изобретение
Изобретение относится к области измерительной техники, а именно к контролю исправности гироскопов в составе космического летательного аппарата для измерения его ориентации и угловых скоростей разворота.
Известен способ определения неисправностей гироскопов в составе измерителей ориентации и угловых перемещений космического летательного аппарата, заключающийся в том, что формируют четыре выходных сигнала гироскопов, четыре сигнала базисов, а при несменяемости выходных сигналов гироскопов в течение пяти секунд формируют первый сигнал неисправности [1].
Недостатком известного способа определения неисправностей гироскопического измерителя вектора скорости космического аппарата является низкая надежность и точность определения угловой скорости летательного аппарата в процессе изменения сложных условий полета.
Известно устройство определения неисправностей гироскопического измерителя вектора угловой скорости космического аппарата, содержащее последовательно соединенное устройство управления, первый переключатель, исполнительное устройство, космический аппарат и астродатчик, второй выход космического аппарата соединен через последовательно подключенные первый гироскоп, первый формирователь базиса и второй переключатель с первым входом устройства управления, второй вход первого переключателя соединен с выходом задатчика тестового сигнала, выход первого гироскопа соединен с первым входом первого сумматора, с первыми входами второго и третьего формирователей базиса и через последовательно соединенные первый блок задержки, первый сумматор и первый нелинейный блок - с первым входом схемы «И», третий выход космического аппарата через второй гироскоп соединен с первым входом четвертого формирователя базиса, вторыми входами второго и третьего формирователей базиса, с первым входом второго сумматора, и выход второго гироскопа соединен через последовательно соединенные второй блок задержки, второй сумматор и второй нелинейный блок со вторым входом схемы «И», четвертый выход космического аппарата через третий гироскоп соединен с третьим входом первого формирователя базиса, со вторыми входами третьего и четвертого формирователей базиса, с первым входом третьего сумматора, а выход третьего гироскопа через последовательно соединенные третий сумматор, третий нелинейный блок подключен к третьему входу схемы «И», пятый выход космического аппарата через четвертый гироскоп подключен к третьим входам второго, третьего и четвертого формирователей базисов, выход четвертого гироскопа соединен с первым входом четвертого сумматора и через последовательно включенные четвертый блок задержки, четвертый сумматор и четвертый нелинейный блок с четвертым входом схемы «И», второй вход устройства управления является входом, а выход схемы «И» - первым выходом устройства, выходы второго, третьего и четвертого формирователей базиса соединены соответственно со вторым, третьим и четвертым входами второго переключателя [2].
Недостатком известного устройства является, как и способа измерения, низкая надежность и точность определения угловой скорости космического летательного аппарата в процессе полета.
С целью исключения указанных недостатков известного способа предлагается способ определения неисправностей гироскопического измерителя вектора угловой скорости космического летательного аппарата, отличающегося тем, что формируют пять пороговых сигналов, сигналы норм гирокватернионов, сигналы норм базисов, сигнал нормы астрокватерниона, определяют скорости изменения выходных сигналов каждого из гироскопов и при превышении ими первого порогового сигнала формируют второй сигнал неисправности, определяют сигналы разностей сигналов гирокватернионов базисов и при превышении ими второго порогового сигнала формируют третий сигнал неисправности, после получения хотя бы одного сигнала неисправности определяют сигнал разности между сигналом нормы гирокватерниона рабочего базиса и сигналом нормы астрокватерниона и при превышении ею третьего порогового сигнала формируют четвертый сигнал неисправности, эпизодически на интервале времени в пять минут определяют сигналы разности сигналов гирокватернионов сигналов базисов и сигнала астрокватерниона и при превышении ею четвертого порогового сигнала формируют пятый сигнал неисправности, эпизодически в течение четырех секунд после получения третьего сигнала неисправности размыкают контур управления космическим аппаратом, подают на вход исполнительного устройства тестовый пробный сигнал, измеряют выходные сигналы гироскопов и при превышении ими пятого порогового сигнала формируют шестой сигнал неисправности.
А устройство, реализующее способ по п.2, отличается тем, что оно дополнительно содержит три схемы «ИЛИ», четырнадцать нелинейных блоков, шесть сумматоров, четыре формирователя сигнала нормы гирокватерниона и формирователь сигнала нормы астрокватерниона, выход астродатчика через формирователь сигнала нормы астрокватерниона соединен с первыми входами пятого, шестого, седьмого и восьмого сумматоров, выход формирователя сигнала нормы астрокватерниона через девятый сумматор подключен ко входу пятого нелинейного блока, выход первого формирователя базиса соединен через последовательно соединенные первый формирователь сигнала нормы гирокватерниона, пятый сумматор и шестой нелинейный блок с первым входом первой схемы «ИЛИ», выход второго формирователя базиса через последовательно соединенные второй формирователь сигнала нормы гирокватерниона, шестой сумматор и седьмой нелинейный блок соединен со вторым входом первой схемы «ИЛИ», выход третьего формирователя базиса подключен к третьему входу первой схемы «ИЛИ» через последовательно соединенные третий формирователь сигнала нормы гирокватерниона, седьмой сумматор и восьмой нелинейный блок, выход четвертого формирователя базиса подключен к четвертому входу первой схемы «ИЛИ» через последовательно соединенные четвертый формирователь сигнала нормы гирокватерниона, восьмой сумматор и девятый нелинейный блок, выход третьего формирователя сигнала нормы гирокватерниона через десятый сумматор подключен ко входу десятого нелинейного блока, выход четвертого формирователя сигнала нормы гирокватерниона соединен со вторым входом десятого сумматора, выход первого гироскопа через одиннадцатый нелинейный блок подключен к первому входу второй схемы «ИЛИ» и через последовательно соединенные первое дифференцирующее устройство и двенадцатый нелинейный блок к первому входу третьей схемы «ИЛИ», выход второго гироскопа через тринадцатый нелинейный блок соединен со вторым входом второй схемы «ИЛИ», а через последовательно соединенные второе дифференцирующее устройство и четырнадцатый нелинейный блок со вторым входом третьей схемы «ИЛИ», выход третьего гироскопа подключен через пятнадцатый нелинейный блок к третьему входу второй схемы «ИЛИ», а через последовательно соединенные третье дифференцирующее звено и шестнадцатый нелинейный блок к третьему входу третьей схемы «ИЛИ», выход четвертого гироскопа через семнадцатый нелинейный блок подключен к четвертому входу второй схемы «ИЛИ», а через последовательно соединенные четвертое дифференцирующее устройство и восемнадцатый нелинейный блок к четвертому входу третьей схемы «ИЛИ», выходы третьей схемы «ИЛИ», десятого нелинейного блока, пятого нелинейного блока, первой схемы «ИЛИ» и второй схемы «ИЛИ» являются соответственно вторым, третьим, четвертым, пятым и шестым выходами устройства.
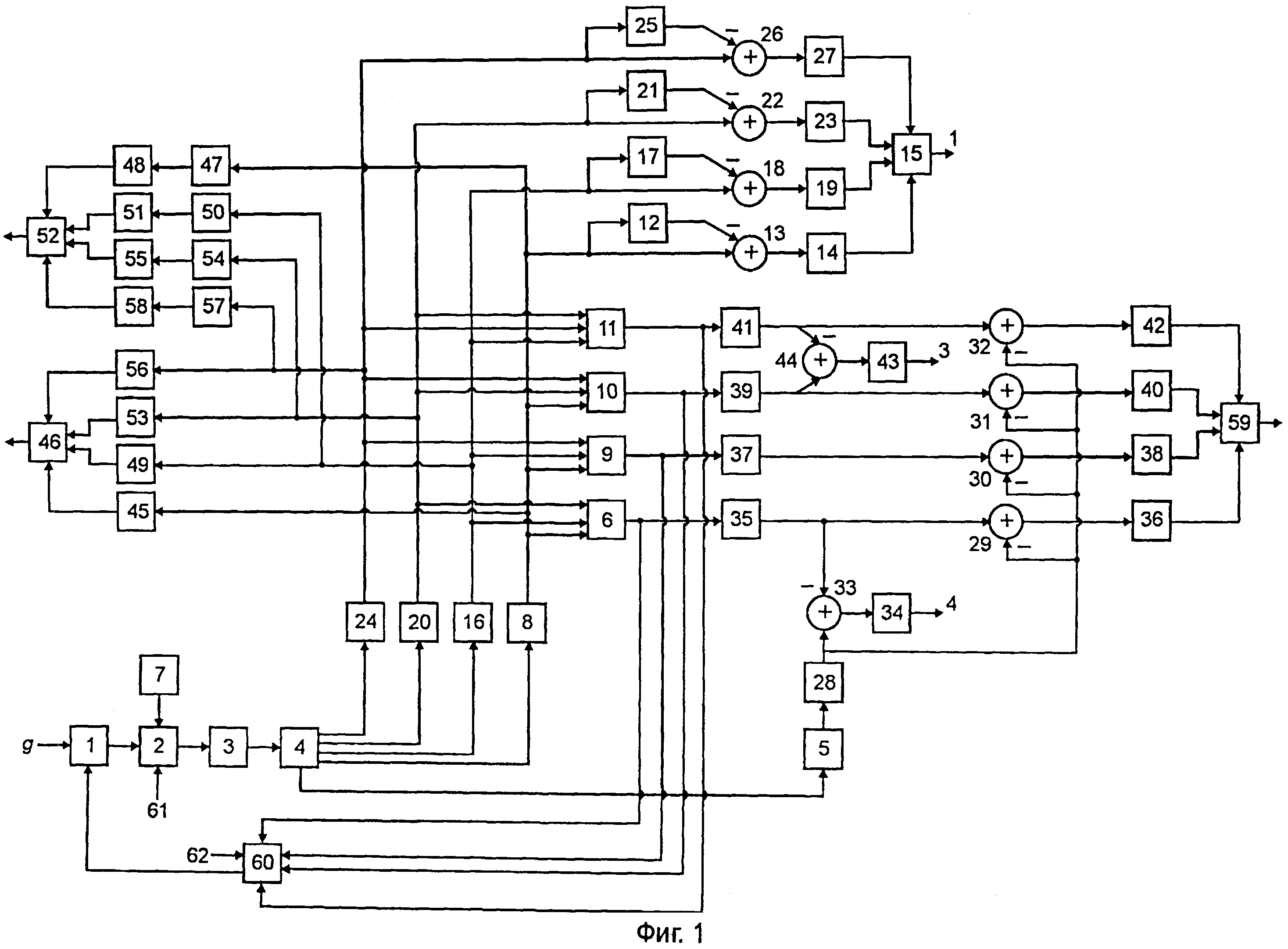
Суть предложенного технического решения поясняется фиг.1, на которой приведена структурная схема устройства определения неисправностей гироскопического измерителя вектора угловой скорости космического аппарата, на фиг.2 - нелинейная статическая характеристика нелинейных блоков, на фиг.3 - схема расположения четырех гироскопов в пространстве, на фиг.4 - структура формирователя сигнала базиса, на фиг.5 - структура формирователей сигнала нормы гирокватерниона (и астрокватерниона).
На фигурах приняты следующие обозначения: 1 - устройство управления, 2 - первый переключатель, 3 - исполнительное устройство, 4 - космический аппарат, 5 - астродатчик, 6 - первый формирователь базиса, 7 - задатчик тестового сигнала, 8 - первый гироскоп, 9 - второй формирователь базиса, 10 - третий формирователь базиса, 11 - четвертый формирователь базиса, 12 - первый блок задержки, 13 - первый сумматор, 14 - первый нелинейный блок, 15 - схема «И», 16 - второй гироскоп, 17 - второй блок задержки, 18 - второй сумматор, 19 - второй нелинейный элемент, 20 - третий гироскоп, 21 - третий блок задержки, 22 - третий сумматор, 23 - третий нелинейный блок, 24 - четвертый гироскоп, 25 - четвертый блок задержки, 26 - четвертый сумматор, 27 - четвертый нелинейный блок, 28 - формирователь сигнала нормы астрокватерниона, 29, 30, 31, 32 - пятый, шестой, седьмой и восьмой сумматоры соответственно, 33 - девятый сумматор, 34 - пятый нелинейный блок, 35 - первый формирователь сигнала нормы гирокватерниона, 36 - шестой нелинейный блок, 37 - второй формирователь сигнала нормы гирокватерниона, 38 - седьмой нелинейный блок, 39 - третий формирователь сигнала нормы гирокватерниона, 40 - восьмой нелинейный блок, 41 - четвертый формирователь сигнала нормы гирокватерниона, 42 - девятый нелинейный блок, 43 -десятый нелинейный блок, 44 - десятый сумматор, 45 - одиннадцатый нелинейный блок, 46 - вторая схема «ИЛИ», 47 - первое дифференцирующее устройство, 48 - двенадцатый нелинейный блок, 49 - тринадцатый нелинейный блок, 50 - второе дифференцирующее устройство, 51 - четырнадцатый нелинейный блок, 52 - третья схема «ИЛИ», 53 - пятнадцатый нелинейный блок, 54 - третье дифференцирующее устройство, 55 - шестнадцатый нелинейный блок, 56 - семнадцатый нелинейный блок, 57 - четвертое дифференцирующее устройство, 58 - восемнадцатый нелинейный блок, 59 - первая схема «ИЛИ», 60 - второй переключатель, 61 - сигнал управления первым переключателем, 62 - сигнал управления вторым переключателем, 63, 64, 65 - соответственно первый, второй и третий усилители, 66 - одиннадцатый сумматор, 67, 68, 69 - четвертый, пятый и шестой усилители, 70, 71, 72 - первый, второй и третий умножители соответственно, 73 - двенадцатый сумматор, 74 - седьмой усилитель, 75 - первый задатчик постоянного сигнала, 76 -тринадцатый сумматор, 77 - восьмой усилитель, 78, 79 - четвертый и пятый умножители соответственно, 80 - второй задатчик постоянного сигнала, 81 -четырнадцатый сумматор, 82 - шестой умножитель, 83, 84, 85, 86 - соответственно первый, второй, третий и четвертый вычислители параметров гирокватерниона, 87, 88, 89, 90 - соответственно седьмой, восьмой, девятый и десятый умножители, 91 - пятнадцатый сумматор, 92, 93, 94, 95 - соответственно пятый, шестой, седьмой и восьмой блоки задержки, 96, 97, 98, 99 - шестнадцатый, семнадцатый, восемнадцатый и девятнадцатый умножители соответственно, 100 - шестнадцатый сумматор.
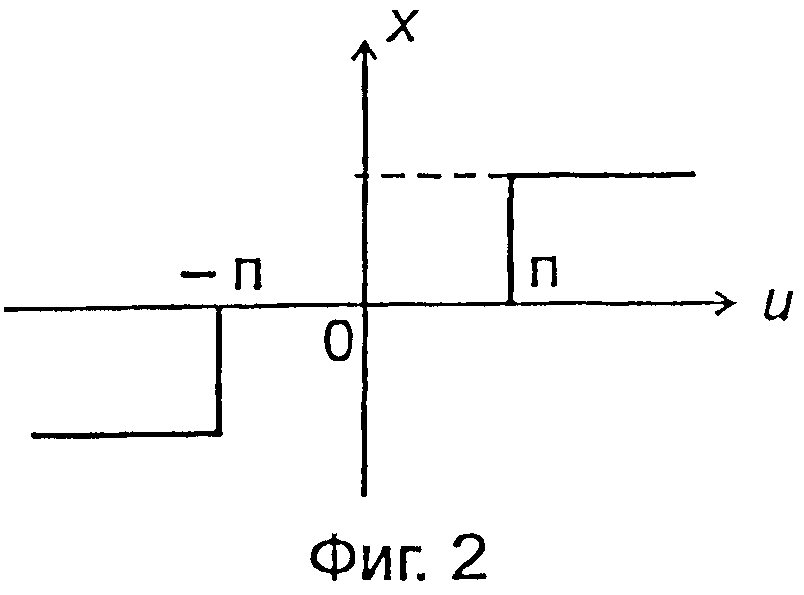
На фиг.2 изображена статическая характеристика нелинейных блоков, указанных на фиг.1. Статическая характеристика может отличаться только значением зоны нечувствительности (-П, П), которая для каждого нелинейного блока задается полетным заданием. При этом значения порогов П в нелинейных блоках фиг.1 в общем случае устанавливаются разными.
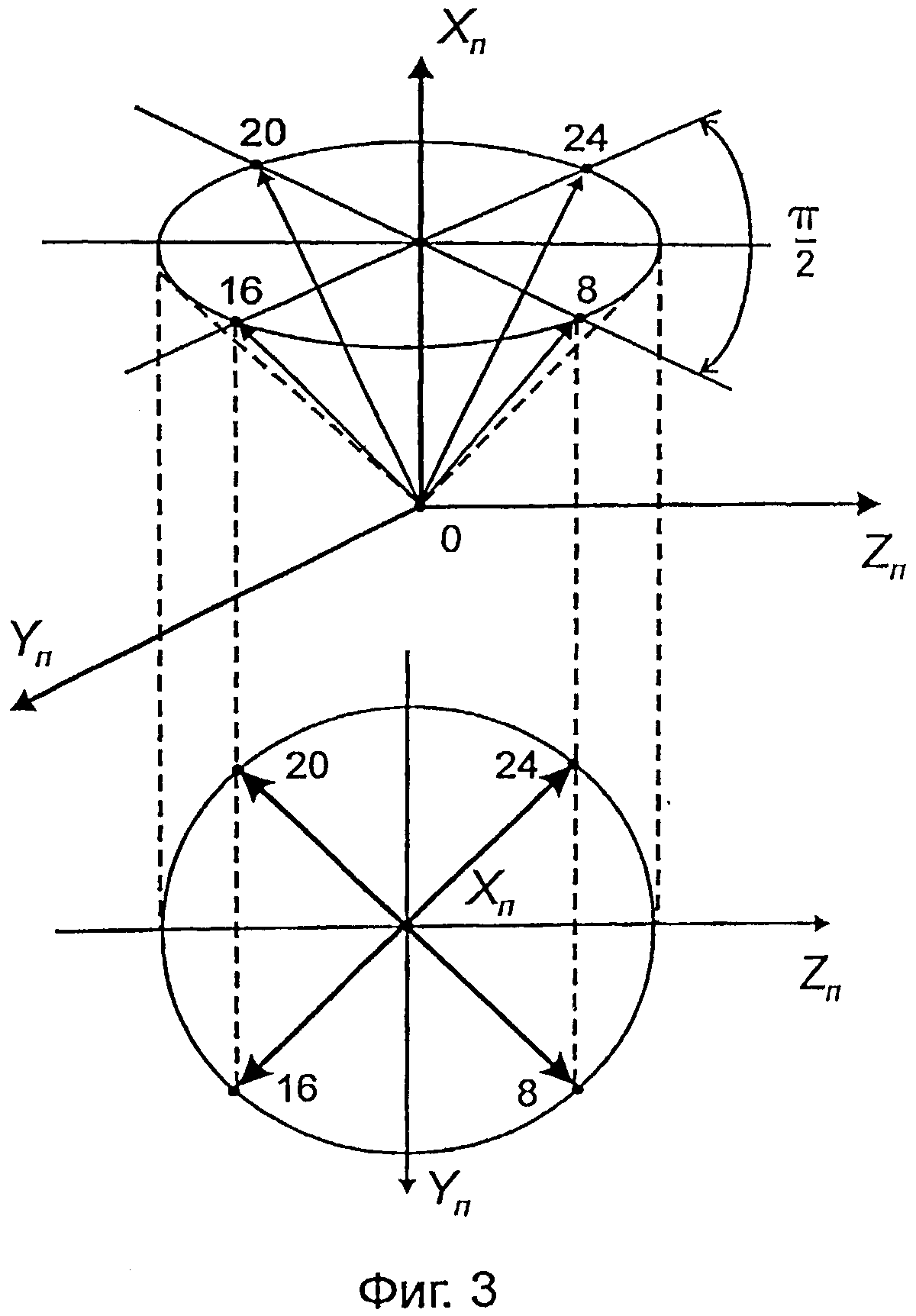
На фиг.3 показана приборная система координат OXпYпZп, расположение гироскопов 8, 16, 20 и 24, а также вид на них сверху [1]. Гироскопы расположены компланарно вокруг оси OXп и сдвинуты на угол  относительно соседних гироскопов.
относительно соседних гироскопов.
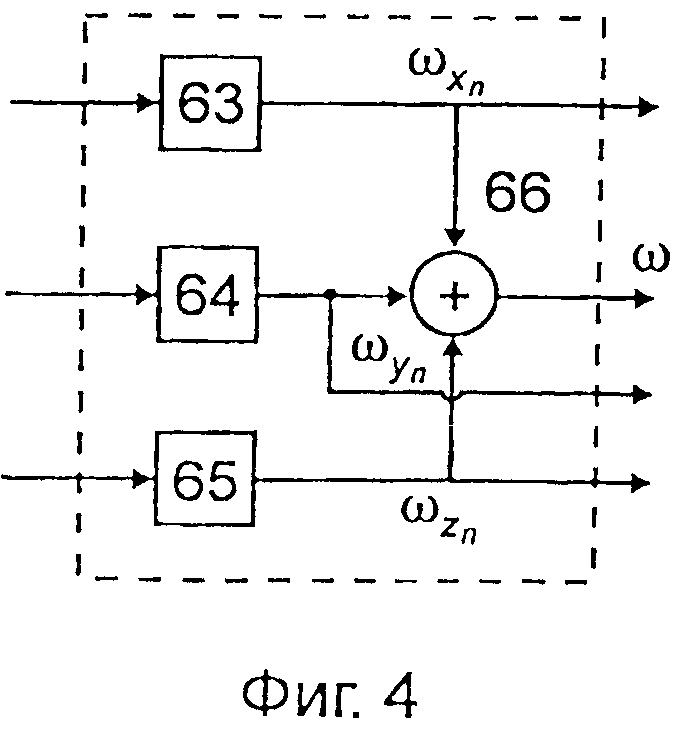
На фиг.4 представлена структура формирователей сигнала базиса 6, 9, 10 и 11, одинаковая для всех и состоящая из масштабных усилителей 63, 64, 65, на входы которых поступают соответствующие выходы гироскопов, и одиннадцатого сумматора 66 с векторным выходом  ,
,  ,
,  .
.
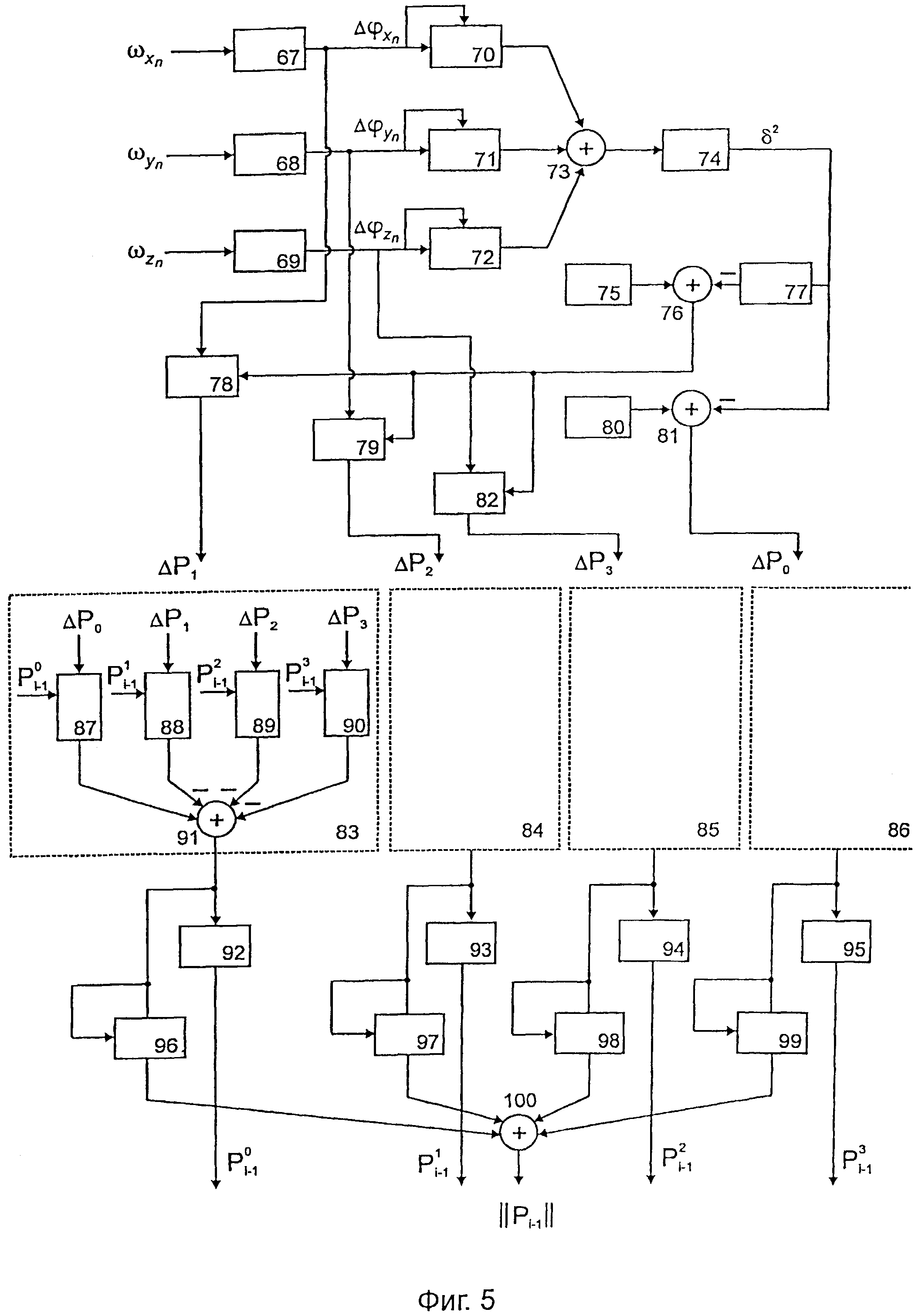
На фиг.5 показана структура формирователей сигнала нормы гирокватерниона (астрокватерниона), который обеспечивает расчет сигнала нормы гирокватерниона (одинаково и астрокватерниона) по следующим зависимостям. По измерениям проекций угловых скоростей  ,
,  ,
,  на оси приборной системы координат OXпYпZп (фиг.3) определяются значения углов приращения
на оси приборной системы координат OXпYпZп (фиг.3) определяются значения углов приращения

где Δt=0,1 сек,
по которым определяется сигнал нормы кватерниона малого поворота космического аппарата 4

Далее рассчитывается значение гирокватерниона на i-том шаге:

о параметрам
где  ,
,  ,
,  ,
,  - параметры гирокватерниона на предыдущем шаге i - 1.
- параметры гирокватерниона на предыдущем шаге i - 1.
При этом зависимость (1) реализуется с помощью четвертого 67, пятого 68 и шестого 69 усилителей, коэффициенты усиления которых одинаковы и равны 0,1.
С помощью первого 70, второго 71, третьего 72 умножителей и двенадцатого сумматора 73 формируется сигнал (δ)2 по формуле 2.
Значение r формируется с помощью седьмого усилителя 74, первого задатчика постоянного сигнала 75, тринадцатого сумматора 76, восьмого усилителя 77.
Параметры гирокватерниона по выражению (4) формируются первым 83, вторым 84, третьим 85 и четвертым 86 вычислителями параметров гирокватерниона, на входы которых поступают сигналы ΔP1, ΔP2, ΔP3 и ΔP4 с выходов соответственно четвертого 78, пятого 79, шестого 82 умножителей и четырнадцатого сумматора 81, на входы которого поступают сигналы с выходов второго задатчика постоянного сигнала 80 и седьмого усилителя 74.
Значения  ,
,  ,
,  ,
,  формируются соответственно на выходах первого 83, второго 84, третьего 85 и шестого 86 вычислителей параметров гирокватерниона.
формируются соответственно на выходах первого 83, второго 84, третьего 85 и шестого 86 вычислителей параметров гирокватерниона.
После получения параметров
,
,
,
они задерживаются соответственно пятым 92, шестым 93, седьмым 94 и восьмым 95 блоками задержки, на выходах получаем задержанные на такт Δt=0,1 сек значения параметров  ,
,  ,
,  ,
,  .
.
Структуры вычислителей параметров гирокватерниона 83, 84, 85 и 86 формируются с помощью соединения умножителей и сумматора согласно выражениям (4) (на фиг.5 они не раскрыты ввиду очевидности их построения).
Для примера рассмотрим первое уравнение выражения (4) для вычисления параметра
гирокватерниона на i-ом шаге и структуру, ее реализующую, которая изображена внутри первого вычислителя 83 параметров гирокватерниона. На фиг.5 показано, что на входы седьмого 87, восьмого 88, девятого 89 и десятого 90 умножителей поступает соответственно ΔP0, ΔP1, ΔP2, ΔP3 с выходов умножителей 78, 79, 82 и сумматора 81, а также задержанные на такт Δt=0,1 сек сигналы
,
,
,
с выходов пятого 92, шестого 93, седьмого 94 и восьмого 95 блоков задержки. На выходе пятнадцатого сумматора 91 получаем сигнал
согласно первому уравнению.
Аналогично получаются структуры второго 84, третьего 85, четвертого вычислителей параметров гирокватерниона, которые строятся по второму, третьему и четвертому уравнениям выражения (4).
Далее с помощью шестнадцатого 96, семнадцатого 97, восемнадцатого 98, девятнадцатого 99 умножителей и шестнадцатого сумматора 100 формируется значение гирокватерниона Pi на i-ом шаге согласно выражению

На фиг.5 приведены не все необходимые соединения. Это сделано для того, чтобы не загромождать чертеж. Из четырех уравнений выражения (4) очевидно, что на входы всех вычислителей параметров гирокватерниона 83, 84, 85, 86 необходимо подать ΔPj и  ,
,  .
.
В случаях, когда сигналы неисправности не сформированы, информация с гироскопического измерителя вектора угловой скорости космического аппарата является достоверной и может быть использована для формирования сигнала управления в устройстве управления 1. В противном случае в устройстве управления 1 сигнал управления не формируется ввиду недостоверности получаемой информации.
Последовательность действий способа определения неисправностей реализована в виде устройства определения неисправностей, поэтому формирование шести сигналов неисправности проследим, используя фиг.1.
Первый сигнал неисправности, указанный в ограничительной части формулы изобретения на способ, формируется на выходе схемы «И» 15.
Если сигналы на выходах гироскопов 8, 16, 20 и 24 не изменяются в течение 5 секунд, то это приведет к тому, что сигналы, поступающие на сумматоры 13, 18, 22 и 26, при сравнении соответственно с сигналами, «задержанными» на шаг h, с выходов блоков задержки 12, 17, 21 и 25 на выходе обеспечат нулевой сигнал или близкий к нему - меньший порога срабатывания П (см. фиг.2). При этом на выходе схемы «И» 15 будет 1 нулевой сигнал, который будем считать поступлением первого сигнала неисправности. В этом случае не работает нормально ни один гироскоп. Если не все гироскопы неисправны, то номер неисправного гироскопа можно определить, измеряя выходы поочередно нелинейных блоков 14, 19, 23, 27.
Второй сигнал неисправности получим на выходе третьей схемы «ИЛИ» 52, на входы которой поступают производные от выходных сигналов гироскопов. Если производные будут больше первого порогового сигнала, то на выходе соответствующего линейного блока 48, 51, 55 или 58 появится сигнал, свидетельствующий о том, что скорость изменения выходного сигнала соответствующего гироскопа больше допустимой и этот гироскоп считается неисправным. Следовательно, появление ненулевого сигнала на выходе третьей схемы «ИЛИ» 52 будет свидетельствовать о выходе из строя хотя бы одного гироскопа. Какой гироскоп неисправен, можно узнать, если измерить выходы нелинейных блоков 48, 51, 55, 58.
Третий сигнал неисправности получим на выходе нелинейного блока 43, на вход которого поступает сигнал разности двух норм /с выходов формирователей 39 и 41/ от сигналов базисов, сформированных из трех выходных сигналов гироскопов (см. Фиг.1).
Четвертый сигнал неисправности получим на выходе нелинейного блока 34 в том случае, если сигнал разности между нормой сигнала рабочего базиса 6 и нормой сигнала астродатчика 5 превысит третий пороговый сигнал, установленный в нелинейном блоке 34.
Пятый сигнал неисправности формируется при превышении разностью выходных сигналов одного из гирокватернионов 35, 37, 39, 41 и астрокватерниона 5 порогового сигнала, установленного одинаковым в нелинейных блоках 36, 38, 40, 42.
Шестой сигнал неисправности на выходе второй схемы «ИЛИ» 46 формируется после получения реакции выходных сигналов гироскопов 8, 16, 20 или 24 на тестовое входное воздействие на входе исполнительного устройства 3 - после отключения выходного сигнала устройства управления 1 на время в течение четырех секунд с помощью переключателя 2, который на это время подключает тестовый сигнал с выхода задатчика тестового сигнала на вход исполнительного устройства 3.
Определение неисправностей гироскопического измерителя вектора угловой скорости космического аппарата производится в процессе функционирования системы управления, которая содержит устройство управления 1, переключатель 2, исполнительное устройство 3, собственно космический аппарат 4, гироскопические измерители 8, 16, 20, 24, астродатчик 5, «рабочий» формирователь базиса (6, 9, 10 или 11) и второй переключатель 60.
Команды, которые управляют первым 2 и вторым 60 переключателями, формируются в полетном задании и на фиг.1 - фиг.5 не отражены. В полетном задании задаются значения пороговых сигналов П всех нелинейных блоков и формируются временные циклограммы на время подключения тестового сигнала на 4 секунды, на формирование и осуществление временных интервалов пять секунд измерительного канала и полсекунды и выбора и осуществления моментов подключения «рабочего» формирователя базиса с помощью переключателя 60 по команде 62.
Как видно из фиг.1 и фиг.4, выходы формирователей базиса 6, 9, 10 и 11 являются векторными, при этом выходы вектора  ,
,  ,
, поступают на входы формирователей 35, 37, 39, 41 сигнала нормы гирокватерниона, а угловая скорость ω - на входы второго переключателя 60.
поступают на входы формирователей 35, 37, 39, 41 сигнала нормы гирокватерниона, а угловая скорость ω - на входы второго переключателя 60.
Выходные сигналы гироскопов 8, 16, 20 и 24 поступают на входы дифференцирующих устройств 47, 50, 54 и 57, нелинейных блоков 56, 53, 49 и 45, формирователей базиса 6, 9, 10 и 11, сумматоров 8, 13, 18 и 26, а также блоков задержки 12,17, 21 и 25 так, как это показано на фиг.1.
Выходные сигналы каждого из сумматоров поступают на вход нелинейного блока. Выходной сигнал сумматора 26, например, представляет собой приращение показаний гироскопа 24 за такт Δt=0,1 сек. Если оно не превышает первого порогового сигнала, установленного в нелинейном блоке 27, то на выходе последнего будет нулевой сигнал. Это будет свидетельствовать об исправности гироскопа 24. Аналогично проверяется исправность остальных гироскопов, содержащих для каждого гироскопа такие же соединения из блоков задержки, сумматоров и нелинейных блоков. Поэтому на выходах нелинейных блоков 23, 19, 14 будут нулевые сигналы в случае исправности гироскопов соответственно 20, 16 и 8. Если показания приращения за время Δt=0,1 сек гироскопа будут недопустимо большие, т.е. превышать по абсолютной величине установленную норму (- П, П), то на выходе нелинейного блока будет сформирован первый сигнал неисправности, который появится и на выходе схемы «ИЛИ» 15.
Если угловые ускорения (или производные выходных сигналов) гироскопов 8, 16, 20 и 24 выйдут за установленные в нелинейных блоках 48, 51, 55 и 58 границы, то появится на выходах второй сигнал неисправности, он же появится и на выходе второй схемы «ИЛИ» 52. Происходит это при превышении первого порогового сигнала нелинейных блоков 51, 55, 48, 58.
Третий сигнал неисправности формируется на выходе нелинейного блока 43, когда разность выходов четвертого 41 и третьего 39 формирователей сигнала нормы гирокватерниона будет превышать заданные границы (- П, П), т.е. при превышении второго порогового сигнала нелинейного блока 43.
На выходе пятого нелинейного блока 34 получают четвертый сигнал неисправности при превышении разности с выходов формирователя сигнала нормы астрокватерниона 28 и выхода первого формирователя сигнала нормы гирокватерниона 35 третьего порогового сигнала, установленного в пятом нелинейном блоке 34. Структура формирователя сигнала нормы астрокватерниона точно такая же, как структура формирователя сигнала нормы гирокватерниона, представленная на фиг.5.
Пятый сигнал неисправности появится на выходе первой схемы «ИЛИ» 59 в том случае, если разность сигналов нормы астрокватерниона с выхода формирователя сигнала нормы астрокватерниона 28 и сигналов норм соответствующих гирокватернионов с выходов первого 35, второго 37, третьего 39 и четвертого 41 формирователей сигнала нормы гирокватерниона, полученных на выходах сумматоров 29, 30, 31, 32, превысит область допустимых значений, ограниченную нелинейными блоками 36, 38, 40 и 42, как это показано на фиг.1.
Эта процедура производится эпизодически в течение 5 минут.
Шестой сигнал неисправности формируется на выходе второй схемы «ИЛИ» 46 после получения третьего сигнала неисправности.
Формирование сигнала с выходов гироскопов 8, 16, 20, 24 в этот промежуток времени в течение 4 секунд представляет собой реакции последовательно соединенных исполнительного устройства 3 и космического аппарата 4 на тестовый пробный сигнал с выхода задатчика тестового сигнала 7. При этом первый переключатель 2 по команде полетного задания 61 размыкает контур управления космическим аппаратом 4 - отсоединяет выход устройства управления 1 от входа исполнительного устройства 3. Нелинейные блоки 45, 49, 53 и 56 на своем выходе выдают шестую команду неисправности соответствующего гироскопа при превышении их входными сигналами пятого порогового сигнала.
Таким образом, предложенный способ и устройство, его реализующее, позволяет контролировать канал измерения угловой скорости ω и выдавать на выходах схемы «И» 15, нелинейных блоков 34, 43 и схем «ИЛИ» 46, 52 и 59 сигналы неисправности. При неисправности на выходах схем «ИЛИ» появляется единичный сигнал, а на выходе схемы «И» - нулевой сигнал. В полетном задании задаются пороговые значения нелинейных блоков, различные для каждого канала формирования неисправностей - с первого по шестой, но в каждом канале формирования определенного типа сигнала неисправности - пороги П одинаковые. Например, при формировании пятого сигнала неисправности имеются четыре нелинейных блока 36, 38, 40 и 42 с одинаковыми порогами. Но последние не равны порогам при формировании шестого сигнала неисправности - порогам, установленным в нелинейных блоках 45, 49, 53, 56.
После получения любого вида неисправности необходимо провести мероприятия, которые направлены на предотвращение влияния неисправностей на работоспособность системы управления. Схемные решения для осуществления этих мероприятий в заявке не указаны.
Технический результат от использования предложенного технического решения (способа и устройства реализации способа) заключается в повышении надежности и точности способа и утройства измерения угловой скорости космического аппарата.
Изобретательский уровень заявленных способа и устройства реализации подтверждается отличительной частью формулы изобретения по п.п.1 и 2.
Литература
1. Уханов Е.В Разработка алгоритмов контроля и диагностики системы управления ориентацией космического аппарата. Реферат. - Харьков: ХПИ. 2005. C.56-62, 80-86 http://www.bestreferat-32636.html/прототип/.
2. Уханов Е.В Разработка алгоритмов контроля и диагностики системы управления ориентацией космического аппарата. Реферат. -Харьков: ХЛИ. 2005. C.23-47, 62-96 http://www.bestreferat-32636.html/прототип/.
Способ формирования цифроаналогового сигнала управления для бортовых систем управления угловым движением беспилотных летательных аппаратов и устройство для его осуществления
Система стабилизации углового движения космического аппарата
Способ повышения теплоотдачи и радиационной защиты электронных блоков
Способ формирования сигнала управления угловым движением нестационарного летательного аппарата и устройство для его осуществления
Способ функционального контроля и резервирования плат измерительного канала угловой скорости космического аппарата и устройство для его реализации
Способ формирования цифроаналогового адаптивного сигнала стабилизации углового положения летательного аппарата по курсу и устройство для его осуществления
Способ формирования цифроаналогового адаптивного сигнала управления летательным аппаратом с переменной структурой и устройство для его осуществления
Способ формирования цифроаналогового сигнала стабилизации углового положения летательного аппарата по курсу и устройство для его осуществления
Способ ориентации космического аппарата и устройство для его реализации
Способ управления ориентацией солнечной батареи космического аппарата с защитой от кратковременных сбоев информации об угловом положении солнечной батареи
Способ формирования цифроаналогового сигнала управления для бортовых систем управления угловым движением беспилотных летательных аппаратов и устройство для его осуществления
Система стабилизации углового движения космического аппарата
Способ повышения теплоотдачи и радиационной защиты электронных блоков
Способ формирования сигнала управления угловым движением нестационарного летательного аппарата и устройство для его осуществления
Способ функционального контроля и резервирования плат измерительного канала угловой скорости космического аппарата и устройство для его реализации
Способ формирования цифроаналогового адаптивного сигнала стабилизации углового положения летательного аппарата по курсу и устройство для его осуществления
Способ формирования цифроаналогового адаптивного сигнала управления летательным аппаратом с переменной структурой и устройство для его осуществления
Способ формирования цифроаналогового сигнала стабилизации углового положения летательного аппарата по курсу и устройство для его осуществления
Способ ориентации космического аппарата и устройство для его реализации
Способ управления ориентацией солнечной батареи космического аппарата с защитой от кратковременных сбоев информации об угловом положении солнечной батареи

