Результат интеллектуальной деятельности: СПОСОБ ОПРЕДЕЛЕНИЯ ПОГРЕШНОСТИ ИЗМЕРЕНИЯ ВОЗДУШНОЙ СКОРОСТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ
Вид РИД
Изобретение
Изобретение относится к измерительной технике, а именно к измерениям воздушной скорости, и может быть использовано для определения погрешностей измерения воздушной скорости и скорости ветра на высоте полета летательного аппарата.
Способ предусматривает использование бортового измерителя углового положения летательного аппарата или инерциальной навигационной системы и спутниковой навигационной системы и одновременное оценивание составляющих скорости ветра, постоянной погрешности измерения воздушной скорости с использованием параметрической идентификации в полете путем выполнения маневров и компенсации этих погрешностей непосредственно в полете или при проведении летных испытаний.
Известен «Способ определения аэродинамических погрешностей приемника воздушных давлений в летных испытаниях летательного аппарата», патент RU 2375690 С1, МПК G01M 9/00, G01P 21/00, G01P 5/175, опубликовано 10.12.2009 г., бюл. №34, принятый в качестве прототипа.
Способ включает операции измерения воздушных параметров при выполнении испытательных режимов полета летательного аппарата в виде горизонтальных площадок с заданными значениями высоты на дозвуковой скорости в эксплуатационном диапазоне. Одновременно определяют изменения статического давления при изменении геометрической высоты полета. Производят полеты на встречных направлениях. Измеряют воздушную скорость, истинные значения статического давления и температуры - пересчетом от зондирующего режима, и на основании измеренных сигналов определяют погрешность в каждом испытательном режиме.
Недостатками являются:
- сложная программа выполнения полета;
- большой объем выполняемых операций;
- жесткие требования к точности выполнения режимов испытательного полета.
Известна также полезная модель «Система определения характеристик бортовых средств измерения воздушных параметров и летно-технических характеристик летательного аппарата при проведении летных испытаний», RU 99181 U1, МПК G01P 5/00, опубликовано 10.11.2010, бюл. №31.
Система осуществляет обработку результатов в записи испытательного полета, при этом не учитывает составляющие скорости ветра и требует громоздких, трудоемких подготовительных работ.
Целью предлагаемого способа является сокращение объема выполняемых операций, снижение требований выполнения сложных программ испытательных полетов и повышение точности определения воздушной скорости.
Поставленная цель достигается за счет того, что согласно заявленному способу определения погрешности измерения воздушной скорости, основанному на измерении воздушной скорости и углов пространственной ориентации летательного аппарата, дополнительно измеряют земную скорость посредством спутниковой навигационной системы, определяют проекции скорости ветра на нормальную земную систему координат путем параметрической идентификации и, используя значения углов пространственной ориентации летательного аппарата, переводят их в систему координат, связанную с летательным аппаратом, на основании полученных данных определяют значение воздушной скорости, сравнивают его со значением, полученным при непосредственным измерении воздушной скорости, используя полученный результат сравнения, формируют функционал и, минимизируя его методом Ньютона рекурентным способом, определяют и компенсируют погрешность измерения воздушной скорости, причем определение и компенсацию погрешности измерения воздушной скорости осуществляют при выполнении летательным аппаратом маневра типа «змейка» или при установившемся развороте с изменением курса на 60-90 градусов.
Заявленный способ может быть реализован с помощью устройства для определения погрешности измерения воздушной скорости, содержащего измеритель воздушной скорости и измеритель углов пространственной ориентации летательного аппарата, в которое дополнительно введены спутниковая навигационная система, блок вычисления воздушной скорости, три устройства возведения в степень, последовательно соединенные первый сумматор, устройство извлечения квадратного корня, второй сумматор, блок определения функционала и блок обработки функционала и третий сумматор, причем выход измерителя воздушной скорости подключен ко второму входу блока определения функционала и к первому входу третьего сумматора, выходы измерителя углов пространственной ориентации летательного аппарата, выходы спутниковой навигационной системы и выходы блока обработки функционала по сигналам, соответствующим значениям проекций скорости ветра на оси земной нормальной системы координат, подключены к соответствующим входам блока вычисления воздушной скорости, выходы которого подключены к входам соответствующих устройств возведения в степень, выходы которых подключены к соответствующим входам первого сумматора, а выход блока обработки функционала по сигналу, соответствующему значению постоянной составляющей систематической погрешности измерения воздушной скорости, подключен ко вторым входам второго и третьего сумматоров.
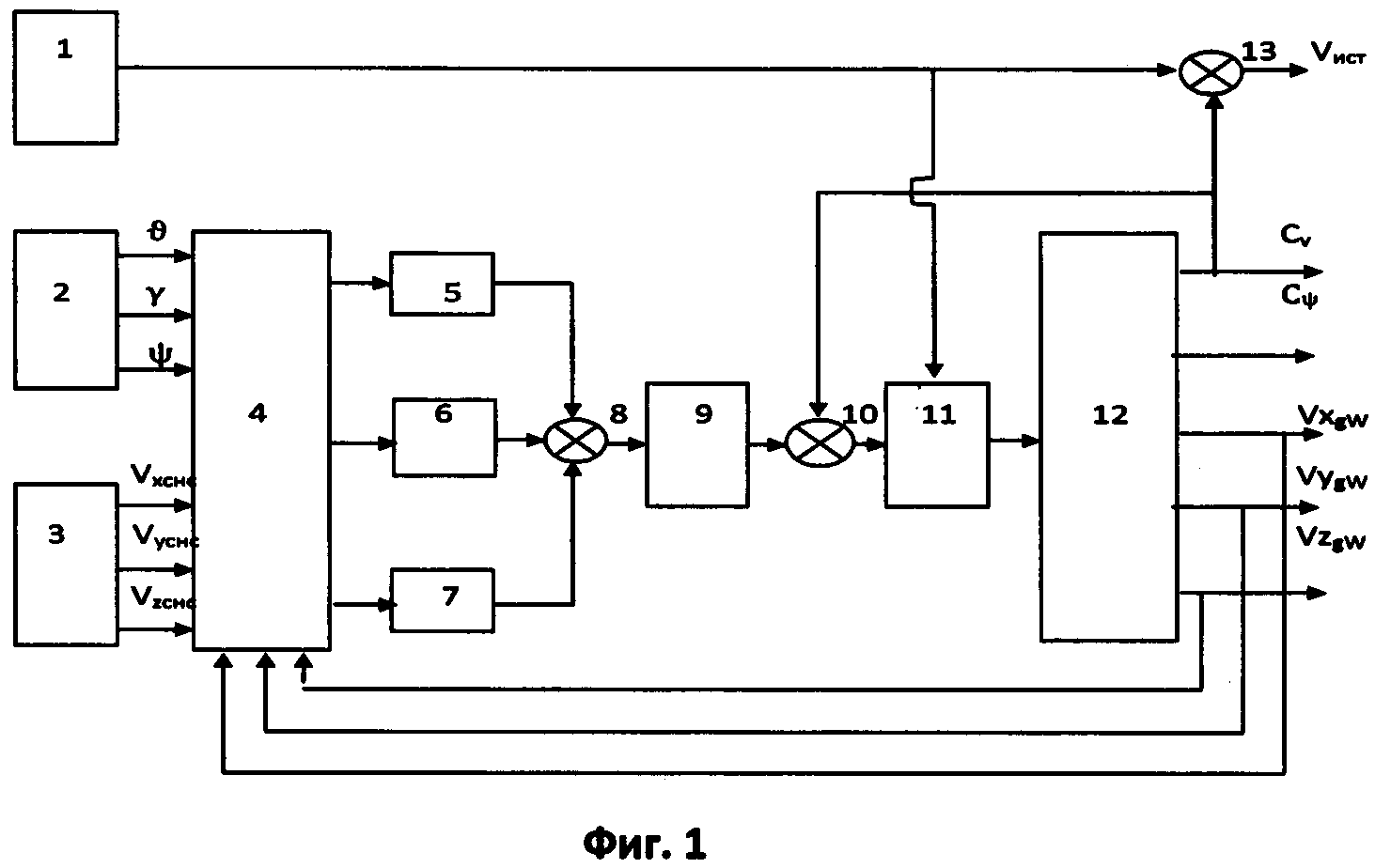
Сущность изобретения поясняется чертежом, Фиг. 1, на котором представлена структурная схема заявляемого устройства для определения погрешности измерения воздушной скорости летательного аппарата.
Устройство содержит измеритель 1 воздушной скорости, измеритель 2 углов пространственной ориентации летательного аппарата, спутниковую навигационную систему 3, блок 4 вычисления воздушной скорости, устройства 5, 6, 7 возведения в степень, первый сумматор 8, устройство 9 извлечения квадратного корня, второй сумматор 10, блок 11 определения функционала, блок 12 обработки функционала и третий сумматор 13.
Выходы 2 и 3 блоков соединены с входами вычислителя 4, выходы блока 4 вычислителя воздушной скорости подключены к входам устройств 5, 6, 7 возведения в степень. Выходы устройств возведения в степень подключены к первому сумматору 8, выход сумматора связан с входом устройства 9 извлечения квадратного корня, выход устройства извлечения квадратного корня соединяется с вторым сумматором 10, второй сумматор связан с блоком 11 определения функционала, вход которого также связан с выходом измерителя 1 воздушной скорости, с выхода блока 11 определения функционала связь идет на вход блока 12 обработки функционала, выход которого связан с блоком 4 вычисления воздушной скорости, вторым сумматором 10 и третьим сумматором 13.
Сущность изобретения по определению погрешности измерения истинной воздушной скорости и последующей компенсации ее заключается в вычислении воздушной скорости по измерениям спутниковой навигационной системы и по вычисленным значениям составляющих скорости ветра, и в сравнении вычисленного значения воздушной скорости с измеренным его значением при помощи измерителя воздушной скорости. По результатам сравнения составляется функционал. Далее путем минимизации функционала методом Ньютона рекуррентным способом определяются три составляющие скорости ветра и погрешность измерения воздушной скорости.
Предполагается, что ветер имеет постоянную скорость и направление на коротком обрабатываемом участке полета. Это означает, что значения проекции скорости ветра Vxgw, Vygw,Vzgw на оси земной нормальной системы координат постоянны.
Определим последовательность операций для получения оценок составляющих скорости ветра Vxgw,Vygw,Vzgw, а также постоянной составляющей погрешности измерения воздушной скорости.
Сформируем модель объекта. Уравнения проекций воздушной скорости самолета в земной нормальной системе координат имеют вид:
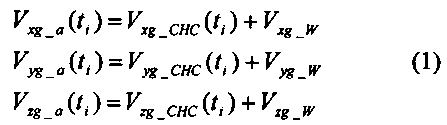
где Vxg_CHC(ti), Vyg_CHC(ti), Vzg_CHC(ti) - измеренные СНС значения проекций скорости ЛА на оси нормальной земной системы;
Vxg_W, Vyg_W, Vzg_W - подлежащие идентификации неизвестные значения проекций скорости ветра на оси нормальной земной системы. Предполагается, что они постоянны на обрабатываемом участке полета.
Уравнение определения модуля вектора воздушной скорости имеет вид:

Проекции воздушной скорости в связанной системе координат получим, умножая значения воздушной скорости (1) на известную матрицу перехода от земной нормальной к связанной системе координат:

Значения углов тангажа, крена и рыскания поступают от измерителя углового положения самолета или инерциальной навигационной системы (ИНС).
В современных ИНС погрешности измерения углов тангажа и крена имеют порядок угловых секунд, поэтому в рассматриваемой задаче ими допустимо пренебречь. Угол рыскания ψ измеряется с медленно меняющейся погрешностью, которая может достигать десятых долей градуса. Поэтому в общем случае эту погрешность следует учитывать. Введем следующее допущение: поскольку длительность обрабатываемых участков не превышает 1…2 минут, погрешность измерения угла рыскания можно считать неизвестной константой Сψ=const. Эта константа включается в вектор идентифицируемых параметров.
Итак, модель объекта определяется уравнениями (1)-(3).
Модель наблюдений принимает вид:

где z(t) - измерения, полученные от измерителя воздушной скорости.
CV - постоянная составляющая систематических погрешностей измерения воздушной скорости;
ξV(ti) - шумы измерений, представляющие собой последовательности независимых нормально распределенных случайных величин, имеющих нулевое математическое ожидание и постоянную дисперсию.
Вектор идентифицируемых параметров имеет вид:

Таким образом, при помощи идентификации осуществляют оценку трех составляющих скорости ветра, постоянной составляющей погрешности измерения угла рыскания, постоянной составляющей погрешности измерения воздушной скорости.
Представленные выше модели объекта и наблюдений можно представить в следующей общей векторной форме:


где y(t), u(t) - векторы выходных и входных сигналов размерности n и m соответственно,
z(ti) - вектор наблюдений размерности r,
а - вектор неизвестных параметров, подлежащий идентификации,
η(ti) - шум наблюдений, представляющий собой векторную нормальную случайную последовательность типа белого шума с нулевым математическим ожиданием и известной дисперсионной матрицей R(ti).
Предполагается, что u(t) есть известная функция времени. Начальные условия y(t0) или предполагаются известными, или включаются в вектор оцениваемых параметров.
Шумы наблюдений представляют собой нормальные и независимые случайные векторные величины. Поэтому их совместная плотность распределения вероятностей равна произведению плотностей для каждого момента ti,  .
.
Известно, что максимум функции правдоподобия при указанных допущениях о свойствах шумов приводит к несмещенным и эффективным оценкам. Функционал максимума правдоподобия имеет следующий вид:

Несложно заметить, что (8) представляет собой функционал метода наименьших квадратов с матрицей весовых коэффициентов R(ti)-1. Таким образом, при указанных выше допущениях о свойствах шумов функционал максимума правдоподобия совпадает с взвешенным функционалом метода наименьших квадратов.
Для минимизации (8) предлагается использовать одну из модификаций классического метода Ньютона:

где:


Производные оценок прогноза определяются численно для моментов времени ti,
по формулам:


где ej - вектор размерности р, все элементы которого равны нулю за исключением j-го элемента, который равен 1; ε - малое число, обычно задаваемое на уровне 0,001…0,1% от номинального значения параметров.
Оценки z(ti, a),
определяются численным решением уравнений объекта и наблюдений при η(ti)=0. Идентификации заканчивается по условию |аk+1-аk|<δ|аk|, где δ=0,005. При обработке в реальном масштабе времени целесообразно жестко задать число шагов, например пять, чтобы зафиксировать число итераций.
Для обеспечения идентифицируемости указанных параметров предлагается выполнять маневры типа "змейка" или установившийся разворот с изменением курса на 60-90 градусов.
Устройство, фиг. 1, реализующее предложенный способ работает следующим образом:
Спутниковая навигационная система 3 выдает сигналы, пропорциональные Vxg_CHC(ti), Vyg_CHC(ti), Vzg_CHC(ti) - значения проекций скорости ЛА на оси нормальной земной системы координат в блок 4 вычисления воздушной скорости. Используя значения углов пространственной ориентации, полученных из измерителя 2, и вычисленные значения трех составляющих скорости ветра из блока 12 обработки функционала, в блоке 4 определяют проекции воздушной скорости в связанной с ЛА системе координат согласно выражениям, приведенным в (1), (3). Устройства 5, 6, 7 возведения в степень, первый сумматор 8 и устройство 9 извлечения квадратного корня предназначены для определения значения истинной воздушной скорости согласно формуле (3). По вычисленному значению истинной воздушной скорости и измеренному значению воздушной скорости при помощи измерителя 1 воздушной скорости в блоке 11 определения функционала находят значение функционала согласно выражению (8).
Искомые значения составляющих воздушной скорости и погрешность измерения воздушной скорости определяются в блоке 12 обработки функционала, при этом используется последовательность выражений, приведенных в (9)-(12).
На выходе третьего сумматора 13 получаем сигнал, пропорциональный скомпенсированному значению истинной воздушной скорости Vист.
Таким образом, только по сигналам, пропорциональным значениям скоростей, полученным от спутниковой навигационной системы 3, измерителя 1 воздушной скорости, измерителя 2 углов пространственной ориентации летательного аппарата, предложенное устройство позволяет определить проекции скорости ветра в полете на земную нормальную систему координат, погрешность измерения угла рыскания, определить и скомпенсировать погрешность измерения воздушной скорости.
В качестве входных сигналов устройства могут быть использованы выходные сигналы бортовых навигационных комплексов, а вычислительная часть устройства может быть выполнена на стандартных элементах вычислительной техники.
Заявленные способ и устройство просты в реализации и применении, обладают достаточно высокой точностью и могут быть использованы во всех типах летательных аппаратов.
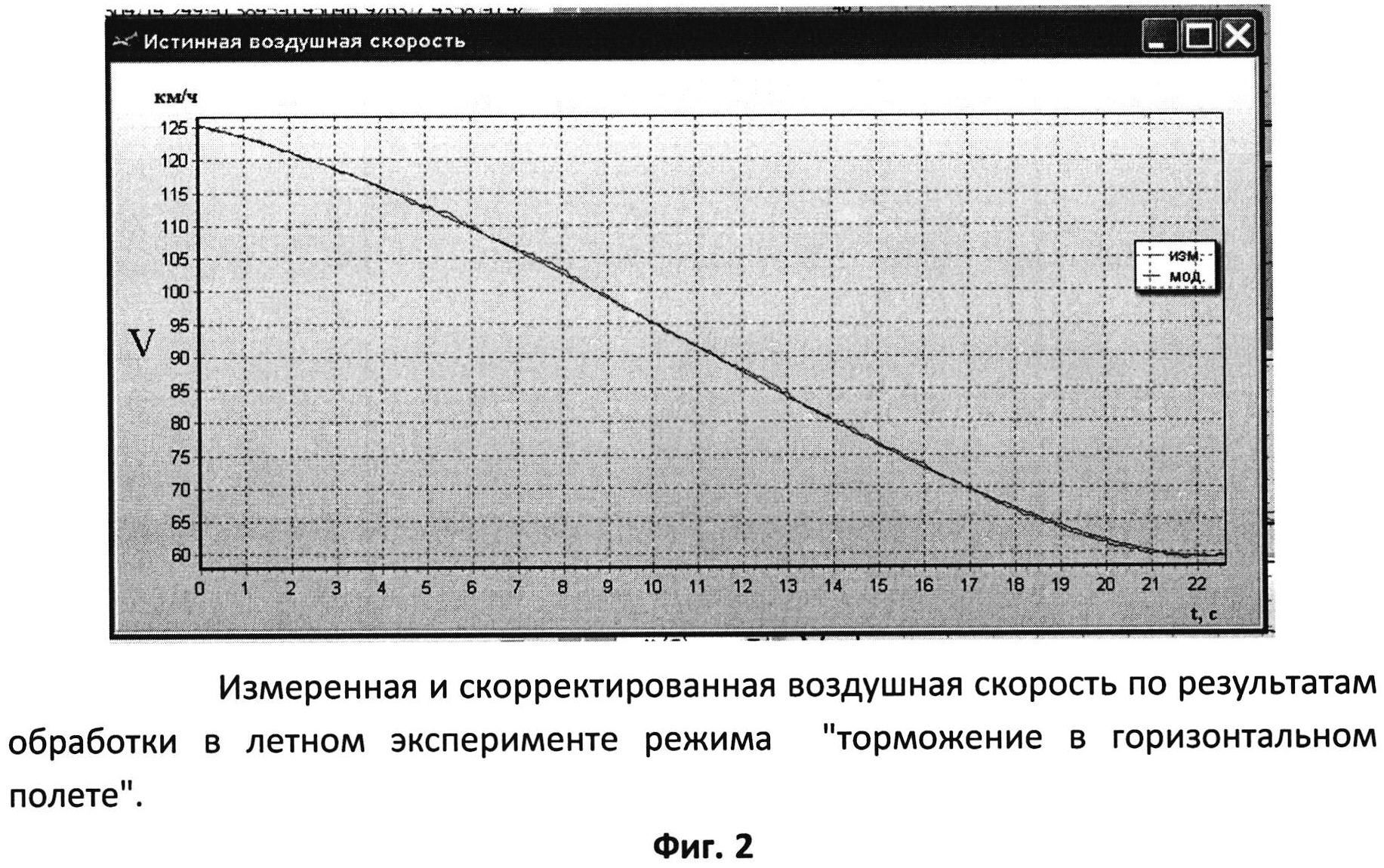
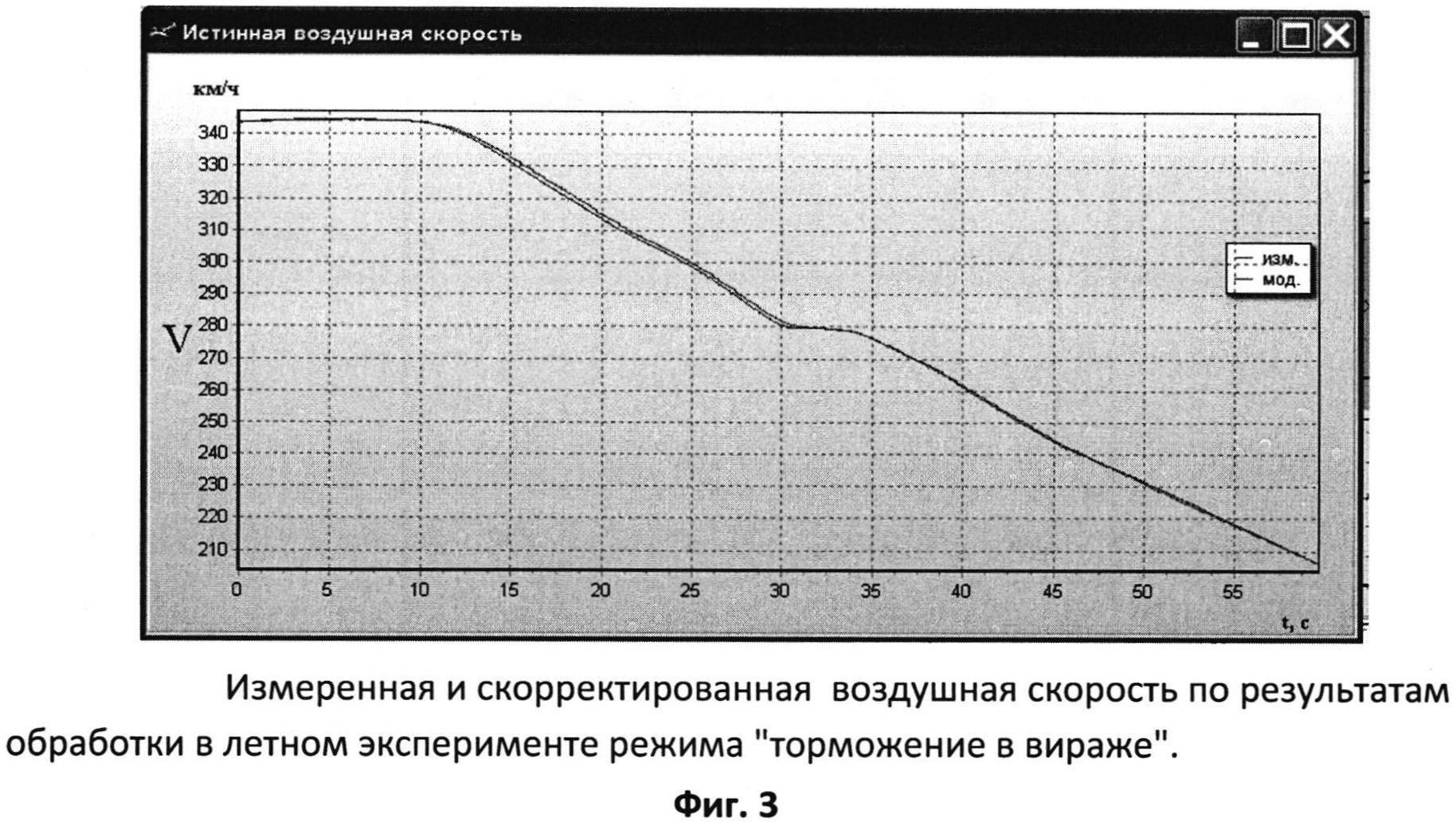
На Фиг. 2 и Фиг. 3 представлены графики, иллюстрирующие результаты эксперимента с использованием предложенного способа определения погрешности измеренной воздушной скорости.
Способ контроля данных от спутниковых навигационных систем и устройство для его осуществления
Способ определения углов пространственной ориентации летательного аппарата и устройство для его осуществления
Способ определения углов пространственной ориентации летательного аппарата и устройство для его осуществления
Исполнительный механизм системы управления
Способ определения тяги при изменении режима работы двигателей самолета и устройство для его осуществления
Устройство определения углов пространственной ориентации летательного аппарата
Способ определения и компенсации девиации магнитометрических датчиков и устройство для его осуществления
Исполнительный механизм системы управления
Способ управления полетом летательного аппарата
Способ формирования отказоустойчивой комплексной системы управления (ксу) и отказоустойчивая ксу
Способ контроля данных от спутниковых навигационных систем и устройство для его осуществления
Способ определения углов пространственной ориентации летательного аппарата и устройство для его осуществления
Способ определения углов пространственной ориентации летательного аппарата и устройство для его осуществления
Исполнительный механизм системы управления
Способ определения тяги при изменении режима работы двигателей самолета и устройство для его осуществления
Устройство определения углов пространственной ориентации летательного аппарата
Способ определения и компенсации девиации магнитометрических датчиков и устройство для его осуществления
Исполнительный механизм системы управления
Способ управления полетом летательного аппарата
Способ формирования отказоустойчивой комплексной системы управления (ксу) и отказоустойчивая ксу

