Результат интеллектуальной деятельности: СПОСОБ ПОЗИЦИОНИРОВАНИЯ ПОДВИЖНОГО РЕЛЬСОВОГО ТРАНСПОРТНОГО СРЕДСТВА НА ЖЕЛЕЗНОДОРОЖНОМ ПУТИ
Вид РИД
Изобретение
Изобретение относится к системам, обеспечивающим высокоточное позиционирование рельсовых транспортных средств, и может быть использовано на железнодорожном транспорте для точного определения местонахождения рабочей техники в режиме реального времени.
Известен способ высокоточного позиционирования для гражданских потребителей путем развертывания локальных дифференциальных подсистем, которые имеют радиус зоны действия не более 200 км, и, как правило, включают одну контрольно-корректирующую станцию, вырабатывающую дифференциальные поправки и данные о целостности, и средства передачи данных, в качестве которых используются средства УКВ-радиосвязи (Ю.А.Соловьев. Спутниковая навигация и ее приложения, М., Эко-тренд, 2003, с. 51, с. 85).
Недостатком известного способа является недостаточная точность позиционирования 1-Зм в динамическом режиме, необходимость развертывания сети корректирующих станций, наличие «мертвых зон» приема.
Известен способ высокоточного позиционирования, реализованный высокоточной координатной системой, включающей дифференциальную подсистему геодезической навигационной спутниковой системы, высокоточную реперную систему и координатную модель железнодорожного пути (И.Н. Розенберг, В.Я. Цветков, С.И. Матвеев, С.К. Дулин, Научно-техническое издание «Интегрированная система управления железной дорогой» под ред. В.И. Якунин, М.: Дизайн, Информация, Картография, 2008, с. 87-94).
В известном способе все координатные расчеты осуществляют в глобальной геоцентрической системе координат. Эта система не имеет картографических искажений, присущих обычным и цифровым картам. Она позволяет реализовать принцип единства измерений. Система оснащена также средствами пересчета координат в государственную систему координат СК-95 в форме прямоугольных, эллипсоидных и плоских координат в проекции Гаусса-Крюгера и в специальной геодезической проекции, не имеющей практически значимых картографических искажений.
Однако достигаемая этим способом точность недостаточна для позиционирования рабочей техникой в реальном времени в ходе выполнения работ, например, по выправке пути, поскольку основные преимущества данного способа проявляются в режиме постобработки.
Техническим результатом предлагаемого изобретения является повышение точности определения местоположения рельсового транспортного средства на железнодорожном пути при его движении в режиме реального времени.
Технический результат достигается тем, что в способе высокоточного позиционирования подвижного рельсового транспортного средства на железнодорожном пути предварительно задают систему реперных объектов, в качестве которых используют элементы объектов инфраструктуры, выполненные в виде многогранников, в режиме реального времени одновременно определяют географические координаты подвижного рельсового транспортного средства с помощью спутниковой навигационной системы и осуществляют лазерное сканирование местности в пределах полосы отвода железнодорожных путей, в автоматическом режиме обрабатывают результаты сканирования и формируют модель текущего пространственного положения объектов инфраструктуры в пределах полосы отвода железнодорожных путей в виде облака точек, в соответствии с географическими координатами позиционируют подвижное рельсовое транспортное средство на цифровой трехмерной векторной карте местности, характеризующей проектную трехмерную векторную модель инфраструктуры железнодорожного транспорта с заданной системой реперных объектов, в зоне позиционирования подвижного транспортного средства определяют реперные объекты, их текущее пространственное положение в виде облаков точек совмещают с их положением на проектной трехмерной векторной карте местности путем минимизации координатной невязки, истинное текущее географическое положение подвижного рельсового транспортного средства вычисляют относительно реперных объектов.
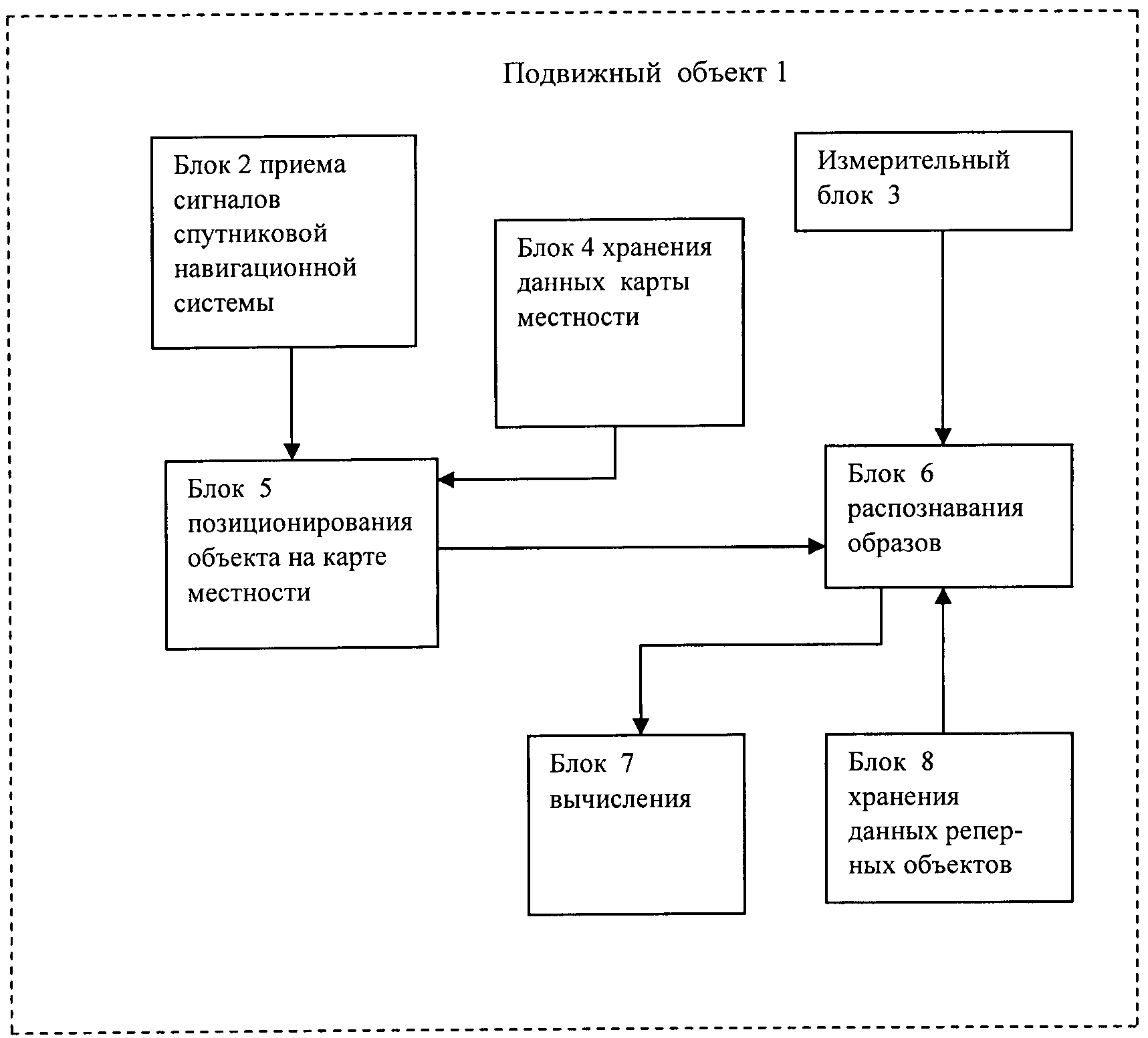
Предлагаемый способ реализует система высокоточного позиционирования подвижного рельсового транспортного средства на железнодорожных путях, структурная схема которого представлена на чертеже.
Система высокоточного позиционирования рельсового транспортного средства на железнодорожном пути содержит установленные на рельсовом транспортном средстве 1 блок 2 приема и обработки сигналов спутниковой навигационной системы, измерительный блок 3, блок 4 хранения данных карты местности, последовательно соединенные блок 5 позиционирования транспортного средства на карте местности, блок 6 распознавания образов и блок 7 вычисления, а также блок 8 хранения данных реперных объектов.
При этом выходы измерительного блока 3 и блока 8 хранения данных реперных объектов подключены, соответственно, ко второму и третьему входам блока 6 распознавания образов, а входы/выходы блока 4 хранения данных карты местности соединены с входом/выходом блока 5 позиционирования транспортного средства на карте местности.
Блок 4 хранения данных карты местности содержит карту местности с высокоточной трехмерной векторной проектной моделью инфраструктуры железнодорожного транспорта.
Блок 9 хранения данных реперных объектов содержит характерные признаки положения объектов инфраструктуры, используемых в системе реперных объектов, в соответствии с проектной трехмерной векторной моделью инфраструктуры железнодорожного транспорта.
Измерительный блок 3 выполнен в виде мобильного лазерного сканера и совмещен с блоком 2 приема и обработки сигналов спутниковой навигационной системы.
Система высокоточного позиционирования подвижного объекта на железнодорожных путях функционирует следующим образом.
Блок 2 приема сигналов спутниковой навигационной системы в режиме реального времени принимает данные о текущей координате положения подвижного объекта и передает их в блок 5 позиционирования объекта на карте местности.
Одновременно измерительный блок 3 осуществляет лазерное сканирование местности в пределах полосы отвода железнодорожных путей с последующей обработкой результатов сканирования и формирует модель текущего пространственного положения объектов инфраструктуры в пределах полосы отвода железнодорожных путей в виде облака точек, данные о котором направляет в блок 6 распознавания образов.
Блок 5 запрашивает данные карты местности с высокоточной трехмерной векторной проектной моделью инфраструктуры железнодорожного транспорта с заданной объемной моделью реперных объектов, на которой позиционирует местоположение подвижного транспортного средства в пределах одного пролета между смежными реперными объектами на трехмерной карте местности путем совмещения координат спутниковой навигационной системы с координатами трехмерной карты местности и определяет реперные объекты на карте местности в зоне позиционирования подвижного транспортного средства, тем самым ограничивая область поиска реперных объектов. Это особенно актуально в малонаселенной местности, где велика вероятность совпадения фрагментов пути (при использовании только трехмерной карты местности) на некоторых участках трассы.
Результаты позиционирования подвижного транспортного средства относительно реперных объектов, расположенных в зоне позиционирования, блок 5 передает в блок 6 распознавания образов.
В блоке 6 осуществляются поиск облаков точек, соответствующих выявленным реперным объектам. Для чего блок 6 определяет нормали с последующим построением плоскостей по группам точек с одинаковым вектором для более точной идентификации реперных объектов. Блок 6 распознает образы реперных объектов в зоне позиционирования подвижного транспортного средства, совмещает их текущее пространственное положение в виде облаков точек с их положением на проектной трехмерной векторной карте местности путем минимизации координатной невязки. Результаты распознавания образов реперных объектов блок 6 передает в блок 7 вычисления.
Реперные объекты, в качестве которых используют элементы объектов инфраструктуры, выполненные в виде многогранников, имеют плоские поверхности с выраженными краями.
При распознавании образов реперных объектов используют локальный метод выделения краев изображений.
Локальный метод выделения краев изображений основан на проверке статистических гипотез о характере случайной последовательности, в качестве которой можно рассматривать строки и столбцы матрицы трехмерного изображения земляного полотна. Форма идеального края представляет собой кусочно-линейную функцию, состоящую из линейных участков. В том случае, если «остроконечность» краев сглажена за счет изменений с течением времени, указанное сглаживание можно получить из идеальной модели края с помощью оператора свертки, ядро которого описывается гауссовой функцией 
При этом репер в результате предварительной обработки может быть задан в виде кусочно-линейной аппроксимации, которая получается, если воспользоваться триангуляцией. В этом случае анализируемый профиль f можно задать последовательностью значений f(xk) в точках xk, k=1, …, N, причем следует выбрать равномерное распределение точек xk на оси x, т.е. xi=xi-1+Δh, i=2, …, N. Другая альтернатива заключается в обобщении дискриминантной функции для непрерывного случая. Пусть f - это наблюдаемый профиль. Тогда дискриминантная функция может быть выбрана следующим образом:

В качестве окрестности точки х, по которой вычисляется дискриминантная функция, выбирается отрезок [x-s, x+s]. Данная дискриминантная функция является обобщением дискриминантной функции, ранее рассмотренной, так как фактически при расчете дискриминантной функции аппроксимируют анализируемый профиль на участке [xi-m, xi+m] по методу наименьших квадратов, подбирая параметры функций f(x|a1,a2,c,xi)=c+al(x-xi)+a2φ(x-xi) и f(x|а,b)=b+ах. При расчете дискриминантной функции (1) решение оптимизационных задач также связано с решением систем линейных уравнений. В данном случае значения а1, а2 и с находятся из системы:



Данная система после несложных преобразований приводится к виду:



Поскольку функция

является четной, то  Поэтому
Поэтому
Аналогичным образом находим а и b из системы уравнений

Отсюда находим, что  и
и 
После оценивания положений всех точек переключения {x1, …, xk} идеальная функция, определяющая геометрию репера, может быть задана в виде:

где 
Считаем положения точек переключения известными, а для оценки параметров c, a1, …, ak, воспользуемся методом наименьших квадратов в интегральной форме. Пусть f - наблюдаемый профиль на отрезке [x0, xk+1].
Тогда нахождение оценок параметров c, a1, …, ak сводится к решению следующей оптимизационной задачи:

Нетрудно определить, что нахождение точки минимума связано с решением следующей системы линейных уравнений:




В блоке 7 вычисляют истинное текущее географическое положение подвижного рельсового транспортного средства относительно реперных объектов.
Предлагаемый метод позволяет обеспечить высокую точность позиционирования при существенно более разряженной реперной системе за счет использования ранее построенной 3-D модели участка пути, привязывая указанную модель к объектам инфраструктуры, таких как опоры электросети, пикеты, платформы.
Способ высокоточного позиционирования подвижного рельсового транспортного средства на железнодорожном пути, заключающийся в том, что предварительно задают систему реперных объектов, в качестве которых используют элементы объектов инфраструктуры, выполненные в виде многогранников, в режиме реального времени одновременно определяют географические координаты подвижного рельсового транспортного средства с помощью спутниковой навигационной системы и осуществляют лазерное сканирование местности в пределах полосы отвода железнодорожных путей, в автоматическом режиме обрабатывают результаты сканирования и формируют модель текущего пространственного положения объектов инфраструктуры в пределах полосы отвода железнодорожных путей в виде облака точек, в соответствии с географическими координатами позиционируют подвижное рельсовое транспортное средство на цифровой трехмерной векторной карте местности, характеризующей проектную трехмерную векторную модель инфраструктуры железнодорожного транспорта с заданной системой реперных объектов, зоне позиционирования подвижного транспортного средства определяют реперные объекты, их текущее пространственное положение в виде облаков точек совмещают с их положением на проектной трехмерной векторной карте местности путем минимизации координатной невязки, истинное текущее географическое положение подвижного рельсового транспортного средства вычисляют относительно реперных объектов.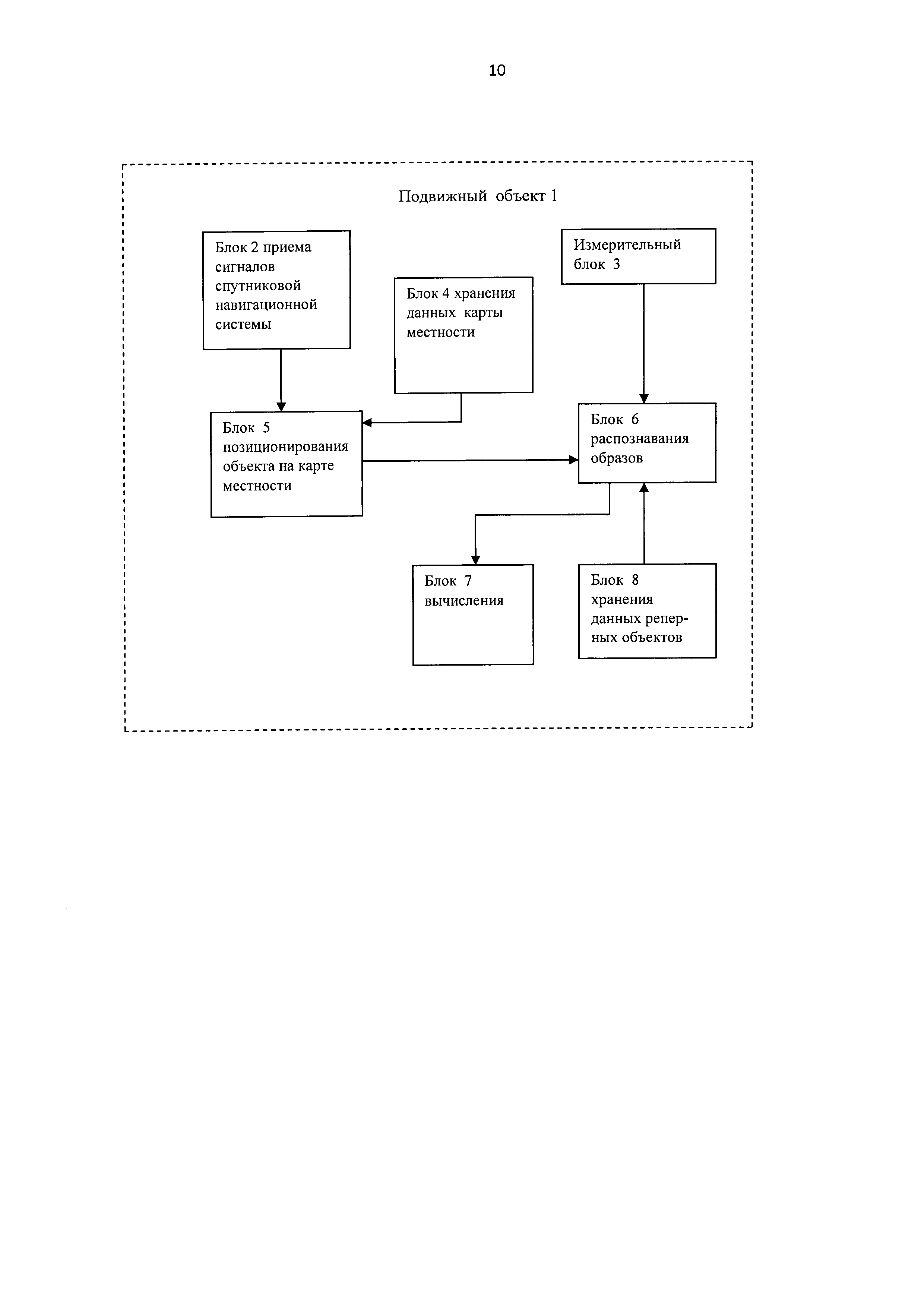
Ручной лункообразователь для высадки рассады в замульчированную почву
Способ определения свободности от подвижного состава участков пути на железнодорожном перегоне
Система полуавтоматической блокировки для ограниченных по длине межстанционных перегонов
Система диагностирования железнодорожного пути
Способ определения свободности железнодорожного перегона от подвижного состава и система полуавтоматической блокировки железнодорожного перегона
Система для управления выправкой железнодорожного пути
Способ определения продольно-напряженного состояния рельсовых плетей бесстыкового железнодорожного пути
Система для контроля нахождения подвижного состава на участке пути
Способ нахождения ремонтной бригадой местоположения скрытой неисправности железнодорожного пути
Система автоматического торможения подвижного состава по данным высокоточной системы координат
Ручной лункообразователь для высадки рассады в замульчированную почву
Способ определения свободности от подвижного состава участков пути на железнодорожном перегоне
Система полуавтоматической блокировки для ограниченных по длине межстанционных перегонов
Система диагностирования железнодорожного пути
Способ определения свободности железнодорожного перегона от подвижного состава и система полуавтоматической блокировки железнодорожного перегона
Система для управления выправкой железнодорожного пути
Способ определения продольно-напряженного состояния рельсовых плетей бесстыкового железнодорожного пути
Система для контроля нахождения подвижного состава на участке пути
Способ нахождения ремонтной бригадой местоположения скрытой неисправности железнодорожного пути
Система автоматического торможения подвижного состава по данным высокоточной системы координат

