Результат интеллектуальной деятельности: СИСТЕМА ДЛЯ УПРАВЛЕНИЯ ВЫПРАВКОЙ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ
Вид РИД
Изобретение
Изобретение относится к устройствам для строительства и ремонта железнодорожного пути и может быть использовано, в частности, при постановке пути в проектное положение.
Известно устройство для управления выправкой железнодорожного пути, содержащее датчики стрел изгиба пути в плане и/или продольном профиле и/или возвышения одного рельса относительно другого, вычислительный блок, датчик пути, блок ввода априорной информации и блок сравнения, причем вычислительный блок выполнен с возможностью определения величин смещений пути относительно неподвижных координат, определяющих положение пути в пространстве, соответствующие входы вычислительного блока и блока сравнения соединены с указанными датчиками через переключатель для избирательного соединения их с соответствующим блоком, выходы датчика пути и блока ввода априорной информации соединены с другими соответствующими входами вычислительного блока, а выходы последнего соединены с другими соответствующими входами блока сравнения, соответствующие выходы которого соединены с соответствующими приводами исполнительного органа для выправки пути (RU 2098538, E01B 29/04, 10.12.97). Известное техническое решение позволяет повысить качество выправки пути путем обеспечения выправки длинных неровностей пути с повышенной плавностью, которая не зависит от исходного положения пути, а также путем обеспечения установки начала и конца переходных кривых в зависимости от технологических требований по проекту или с привязкой к фактическому положению пути.
Однако для управления выправкой железнодорожного пути, основанной на относительных измерениях, в известном устройстве имеют место существенные погрешности измерений, накапливаемые при движении машины вследствие неточности измерений, приводящие к возникновению длинных неровностей в плане и профиле пути, то есть неровностей, длина которых больше длины базы путевыправочной машины. Проект выправки задается путем указания линейных координат начала и конца кривых и параметров кривых, которые затем переводятся в стрелы изгиба также в привязке к линейной координате. При проведении выправки система не учитывает текущего положения пути относительно проектного, поэтому имеющиеся до выправки длинные неровности остаются и после выправки. В устройстве также не учитываются габаритные ограничения, поэтому в процессе выправки, основанной на относительных измерениях, возможно нарушение габаритов приближения строений или междупутья.
В качестве прототипа принята система для управления выправкой железнодорожного пути, содержащая путевую машину, рама которой опирается на ходовые тележки, и смонтированные на раме устройство для выправки железнодорожного пути, включающее в себя подъемно-рихтовочное устройство с блоком управления и измерительную тележку, определяющую положение оси пути, и вычислительный блок с подключенными к нему блоком памяти и блоком отображения информации, мобильную референцную станцию, спутниковую систему позиционирования, размещенную на путевой машине, на крыше которой установлены антенна спутниковой системы позиционирования, и датчик угла наклона, соединенный с вычислительным блоком, к которому подключены выход приемника спутниковой системы позиционирования и устройство определения пространственного положения измерительной тележки, размещенное под рамой путевой машины, мобильная референцная станция и спутниковая система позиционирования соединены между собой каналом связи посредством установленных на них радиомодемов, а в блок памяти записана электронная модель проекта положения пути в трехмерной пространственной системе координат (RU 2454498, E01B 29/04, 27.06.12). Наличие в системе данных о проектном положении пути в абсолютной системе координат и величины отклонения текущего положения пути от проектного в любой точке обеспечивает в результате выправки положение пути, близкое к проектному. Поэтому известная система позволяет повысить точность положения железнодорожного пути относительно проектного с обеспечением правильного расположения пути относительно полотна дороги и объектов инфраструктуры.
К недостаткам известной системы для управления выправкой железнодорожного пути, основанной на абсолютных измерениях, следует отнести вычисление текущего положения пути и отклонения его от проектного непосредственно в месте работы подъемно-рихтовочного устройства. Поскольку погрешность вычисления текущего положения пути с использованием спутникового приемника в дифференциальном режиме в реальном масштабе времени в абсолютных координатах составляет 2-4 см в плане и 4-8 см в профиле, необходим механизм сглаживания полученных данных для обеспечения плавности пути, характеризующейся скоростью изменения кривизны.
Технический результат изобретения заключается в повышении степени приближение положения пути к проектному с обеспечением необходимой плавности.
Технический результат достигается тем, что в систему для управления выправкой железнодорожного пути, содержащую мобильную референцную станцию, путевую машину, рама которой опирается на ходовые тележки, и смонтированные на раме устройство для выправки железнодорожного пути, включающее в себя подъемно-рихтовочное устройство с блоком управления, устройство определения пространственного положения измерительной тележки, вычислительный блок управления, соединенный с блоком управления подъемно-рихтовочного устройства, блок памяти, в котором записана электронная модель проекта положения пути в трехмерной пространственной системе координат, и спутниковую систему позиционирования, соединенную каналом связи с референцией станцией посредством установленных на них радиомодемов, согласно изобретению введены блок обработки информации, тросо-хордовая измерительная система для определения стрелы изгиба в зоне подбивочно-рихтовочного устройства и датчик угла наклона антенны спутниковой системы позиционирования, которая установлена на крыше расположенного впереди путевой машины дополнительного вагона, таким образом, что ее проекция пересекает устройство определения пространственного положения измерительной тележки, размещенное под дополнительным вагоном, информационный выход тросо-хордовой измерительной системы соединен с первым входом вычислительного блока управления, второй вход которого подключен к выходу блока обработки информации, датчик угла наклона и датчики определения смещения измерительной тележки подключены к блоку сбора данных компенсационной системы, выход которого соединен с первым входом блока обработки информации, к которому подключен блок памяти, с записанной в нем электронной моделью проекта положения пути в трехмерной пространственной системе координат, второй вход блока обработки информации соединен с выходом спутниковой системы позиционирования, а его выход соединен со вторым входом вычислительного блока управления.
Система для управления выправкой железнодорожного пути с вышеперечисленной совокупностью признаков основана на одновременном использовании абсолютного и относительного методов измерений параметров существующего положения пути, реализованных посредством тросо-хордовой системы измерения в относительной системе координат, находящейся непосредственно на путевыправочной машине, и спутниковой системы измерения в абсолютной системе координат, включающей референцную станцию для повышения точности позиционирования спутникового приемника и компенсационную составляющую для пересчета координат фазового центра антенны спутникового приемника на ось пути, представленную измерительной тележкой, находящейся вместе со спутниковым приемником на дополнительном (служебном) вагоне впереди путевой машины.
На чертеже представлена схема предлагаемой системы для управления выправкой железнодорожного пути.
Система для управления выправкой железнодорожного пути содержит мобильную референцную станцию 1, путевую машину, рама которой опирается на ходовые тележки (на чертеже не показано), и смонтированные на раме устройство для выправки железнодорожного пути, включающее в себя подъемно-рихтовочное устройство (на чертеже не показано) с блоком 2 управления, устройство определения пространственного положения измерительной тележки (на чертеже не показано), вычислительный блок 3 управления соединенный с блоком 2 управления подъемно-рихтовочного устройства, блок 4 памяти, в котором записана электронная модель проекта положения пути в трехмерной пространственной системе координат, и спутниковую систему 5 позиционирования, соединенную каналом связи с референцной станцией 1 посредством установленных на них радиомодемов 6 и 7, блок 8 обработки информации, тросо-хордовая измерительная система 9 для определения стрелы изгиба в зоне подбивочно-рихтовочного устройства, состоящая (на чертеже не показано) из трех измерительных тележек с прижимными механизмами для жесткого прижатия их к рельсовой колее, две из которых расположены на максимальном расстоянии впереди и сзади путевой машины, а третья - непосредственно перед подъемно-рихтовочным устройством, причем на продольных осях первых двух тележек жестко закреплен измерительный трос, который свободно проходит через отверстие в оси третьей тележки, датчик 11 угла наклона антенны 10 спутниковой системы позиционирования, которая установлена на крыше расположенного впереди путевой машины дополнительного вагона, таким образом, что ее проекция пересекает устройство определения пространственного положения измерительной тележки, размещенное под дополнительным вагоном, информационный выход тросо-хордовой измерительной системы 9 соединен с первым входом вычислительного блока 3 управления, второй вход которого подключен к выходу блоку 8 обработки информации, датчик 11 угла наклона и датчики 12 определения смещения измерительной тележки подключены к блоку 13 сбора данных компенсационной системы, выход которого соединен с первым входом блока 8 обработки информации, к которому подключен блок 4 памяти, с записанной в нем электронной моделью проекта положения пути в трехмерной пространственной системе координат, второй вход блока 8 обработки информации соединен с выходом спутниковой системы 5 позиционирования, а его выход соединен со вторым входом вычислительного блока 3 управления.
Относительная (линейная) координатная система привязана к линейному пикетажу, вычисляемому одометром (на чертеже не показан) вдоль оси пути, параметры пути в плане и профиле представляются в виде кривизны пути, получаемой на основании измерения кривизны. Измерения выполняются так называемым хордовым методом. Средства измерения ограничены собственными геометрическими параметрами машины и выполнены в виде трех измерительных тележек, жестко прижатых к рельсовой колее прижимными механизмами, две из которых разнесены на максимально возможное расстояние впереди и сзади машины, а третья располагается непосредственно перед подъемно-рихтовочным устройством. При наличии турного вагона передняя измерительная тележка может быть вынесена под вагон. На продольных осях первых двух тележек жестко закреплен измерительный трос, который свободно проходит через отверстие в оси третьей тележки. Место закрепления троса к передней тележке является передней точкой измерительной хорды, место закрепления троса к задней тележке является задней точкой измерительной хорды. При движении путевой машины обеспечивается натяжение троса между передней и задней тележками машины, по отклонению средней тележки от продольной оси определяются параметры стрелы изгиба, характеризующие кривизну пути в точке измерения. Расстояние от передней точки хорды до точки измерения, а также расстояние от задней точки хорды до точки измерения называются плечами измерительной хорды. Симметричная хорда имеет соотношение плеч 1:1. Точность измерений зависит от длины плеч измерительной хорды, чем больше длина плеч, тем лучше точность. Абсолютная (пространственная) система координат представлена в виде геоцентрической и плоской системами координат, связанных заданными параметрами (ключами) перехода от одной системы к другой. Носителем параметров абсолютной системы координат является референцная станция 1, расположенная временно в районе ремонта или стационарно на расстоянии не более 10 км от места ремонта. Для измерения местоположения в пространственной системе координат используется спутниковая система 5 позиционирования, антенна 10, которой установлена на крыше дополнительного (турного) вагона, расположенного впереди путевой машины, (либо над местом крепления троса к передней измерительной тележки или впереди его).
Спутниковая система 5 позиционирования в режиме реального времени получает ГЛОНАСС/GPS навигационные данные, данные от референцией станции 1 по каналу связи УКВ или GSM и рассчитывает местоположение фазового центра антенны 10. Вынос вперед антенны 10 приемника спутниковой системы 5 позиционирования необходим для обеспечения возможности применения статистических методов уравнивания точек, полученных спутниковым приемником.
Система для управления выправкой железнодорожного пути работает следующим образом.
Перед началом работы системы в блок 4 памяти заносятся исходные данные проекта положения пути (электронная модель проекта положения пути в трехмерной пространственной системе координат). Если в районе ремонта отсутствует стационарная референцная станция, то временно устанавливают мобильную референцную станцию 1 на одно из мест с известными координатами, и в дальнейшем используют ее при подготовке проекта в качестве реперной точки. Связь между референцией станцией 1 и приемником спутниковой системы 5 позиционирования осуществляется по радиоканалу посредством установленных на них соответствующих радиомодемов 6 и 7.
Уточненные координаты вырабатываются совместно спутниковой системой 5 позиционирования с использованием данных от референцией станции 1 и указывают местоположение фазового центра антенны 10, установленной на крыше дополнительного (турного) вагона, расположенного впереди путевой машины, (либо над местом крепления троса к передней измерительной тележки или впереди его). Для определения координатного положения фактической оси пути необходимо произвести редукцию (пересчет координат) фазового центра антенны на ось пути. Для этого используется блок 13 сбора данных компенсационной системы, на который поступает информация от датчика 11 угла наклона и датчиков 12 определения смещения тележки относительно продольной оси вагона. Датчик 11 угла наклона служит для определения угла наклона вагона во время его движения для расчета смещения вследствие наклона фазового центра антенны 10 относительно оси пути. С выхода блока 13 сбора данных компенсационной системы информация поступает на блок 8 обработки информации (обработки и вычисления абсолютных координат), где для применения алгоритмов сглаживания используется максимально возможное количество точек, редуцированных на ось пути, которое зависит от расстояния вдоль оси пути от проекции фазового центра антенны до передней точки измерительной хорды, скорости движения машины и частоты спутникового приемника. В результате использования алгоритмов сглаживания определяется фактическое положение оси пути на передней точке измерительной хорды, которое сравнивается с проектным положением в вычислительном блоке 3 управления и формируется величина сдвижки пути в данной точке. Одновременно в вычислительный блок 3 управления поступает информация о текущем значении стрелы изгиба фактического положения пути, измеренном тросо-хордовой измерительной системой 9, в точке нахождения подъемно-рихтовочного устройства. На основании величины сдвижки пути на передней точке измерительной хорды и текущей стрелы изгиба в точке нахождения подъемно-рихтовочного устройства формируется информация о новой стреле изгиба в вычислительном блоке 3 управления, передающим управляющие команды в блок 2, осуществляющий управление подъемно-рихтовочным устройством.
В предложенной системе для управления выправкой железнодорожного пути используются абсолютный и относительный методы измерений положения пути, интегрированные в единый комплекс и дополняющие друг друга в процессе работы, при которой одновременно снижается влияние отрицательных факторов обоих методов.
Погрешность абсолютного метода, составляющая для приборов спутниковой навигации в кинематическом режиме 1,5-2 см в плане, уменьшается за счет относительных измерений, а именно за счет соотношения плеч измерительной хорды машины. При соотношении 1:5 погрешность на исполнительном устройстве составит 3-4 мм. Кроме того, относительная система измерения обеспечивает плавность геометрии пути за счет задаваемой величины разности соседних стрел изгиба.
Погрешность относительной системы измерения машины, обусловленная накапливаемой погрешностью датчика пройденного пути, прижимных роликов измерительных тележек, тросо-хордового механизма, уменьшается за счет контроля текущего положения пути и внесения поправки в процессе работы. Кроме того, устраняется системная ошибка относительного метода, используемого без предварительной съемки текущего положения пути.
Перенос антенны спутниковой системой позиционирования вперед по ходу движения позволяет производить усреднение результатов спутниковых измерений по времени за счет интервала между получением координат приемником спутниковой системой позиционирования и использованием их для выдачи сигнала на исполнительное подъемно-рихтовочное устройство, обеспечиваемого временем проезда путевой машины от точки измерения до передней точки хорды. Для машины ВПО-3000 этот интервал может быть в пределах 20-30 с, в зависимости от скорости движения машины, и количество точек для обработки (интерполяции, фильтрации) достигает 20-30.
Система для управления выправкой железнодорожного пути, содержащая мобильную референцную станцию, путевую машину, рама которой опирается на ходовые тележки, и смонтированные на раме устройство для выправки железнодорожного пути, включающее в себя подъемно-рихтовочное устройство с блоком управления, устройство определения пространственного положения измерительной тележки, вычислительный блок управления, соединенный с блоком управления подъемно-рихтовочного устройства, блок памяти, в котором записана электронная модель проекта положения пути в трехмерной пространственной системе координат, и спутниковую систему позиционирования, соединенную каналом связи с референцной станцией посредством установленных на них радиомодемов, отличающаяся тем, что в нее введены блок обработки информации, тросо-хордовая измерительная система для определения стрелы изгиба в зоне подбивочно-рихтовочного устройства и датчик угла наклона антенны спутниковой системы позиционирования, которая установлена на крыше расположенного впереди путевой машины дополнительного вагона, таким образом, что ее проекция пересекает устройство определения пространственного положения измерительной тележки, размещенное под дополнительным вагоном, информационный выход тросо-хордовой измерительной системы соединен с первым входом вычислительного блока управления, второй вход которого подключен к выходу блока обработки информации, датчик угла наклона и датчики определения смещения измерительной тележки подключены к блоку сбора данных компенсационной системы, выход которого соединен с первым входом блока обработки информации, к которому подключен блок памяти с записанной в нем электронной моделью проекта положения пути в трехмерной пространственной системе координат, второй вход блока обработки информации соединен с выходом спутниковой системы позиционирования, а его выход соединен со вторым входом вычислительного блока управления.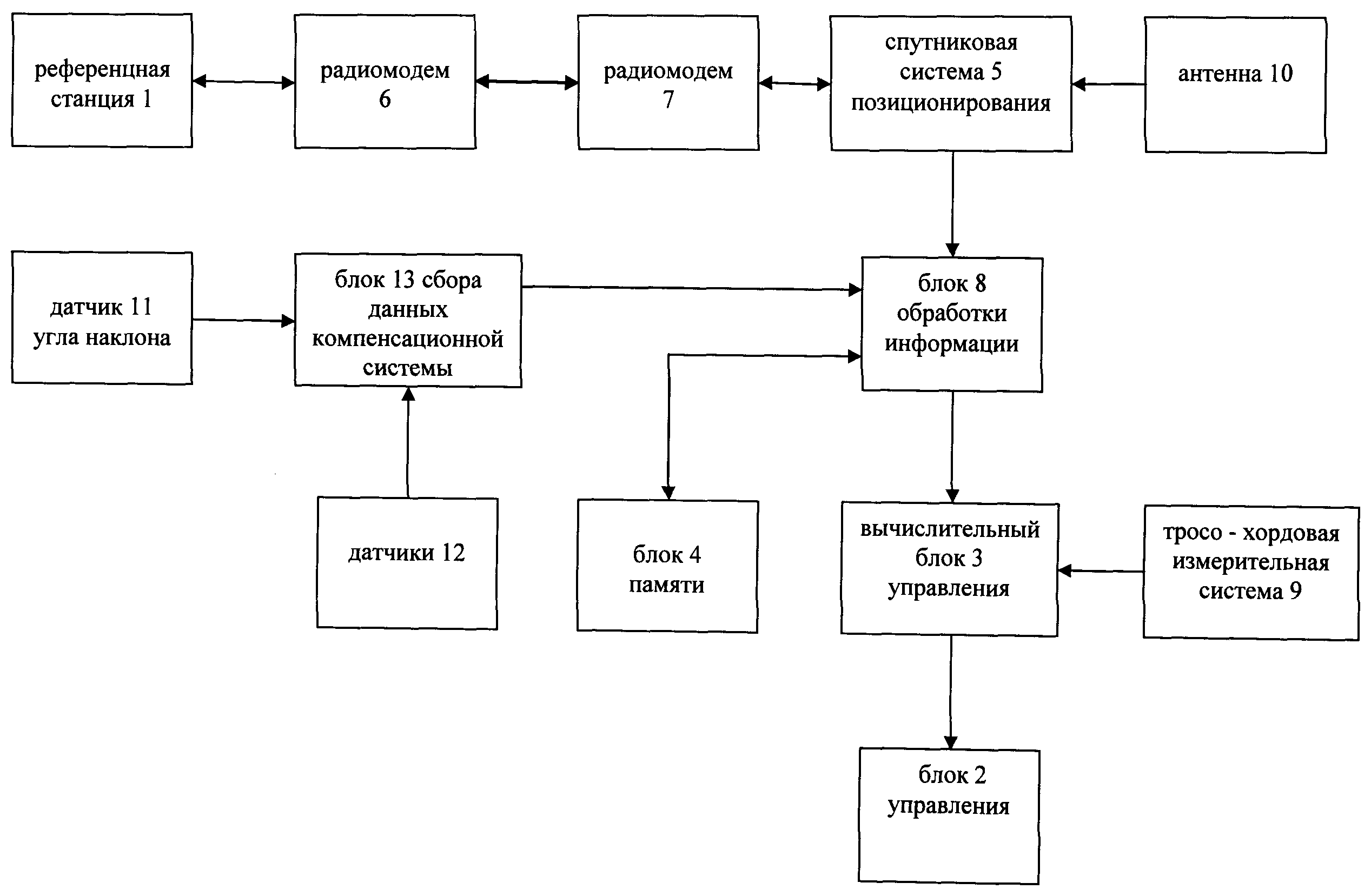
Навигационное коммуникационное мобильное устройство маневрового локомотива
Комплексная система позиционирования подвижных объектов на цифровой модели путевого развития станции
Способ определения свободности от подвижного состава участков пути на железнодорожном перегоне
Система полуавтоматической блокировки для ограниченных по длине межстанционных перегонов
Система диагностирования железнодорожного пути
Способ определения свободности железнодорожного перегона от подвижного состава и система полуавтоматической блокировки железнодорожного перегона
Способ определения продольно-напряженного состояния рельсовых плетей бесстыкового железнодорожного пути
Система для контроля нахождения подвижного состава на участке пути
Способ позиционирования подвижного рельсового транспортного средства на железнодорожном пути
Способ нахождения ремонтной бригадой местоположения скрытой неисправности железнодорожного пути
Навигационное коммуникационное мобильное устройство маневрового локомотива
Комплексная система позиционирования подвижных объектов на цифровой модели путевого развития станции
Способ определения свободности от подвижного состава участков пути на железнодорожном перегоне
Система полуавтоматической блокировки для ограниченных по длине межстанционных перегонов
Система диагностирования железнодорожного пути
Способ определения свободности железнодорожного перегона от подвижного состава и система полуавтоматической блокировки железнодорожного перегона
Способ определения продольно-напряженного состояния рельсовых плетей бесстыкового железнодорожного пути
Система для контроля нахождения подвижного состава на участке пути
Способ позиционирования подвижного рельсового транспортного средства на железнодорожном пути
Способ нахождения ремонтной бригадой местоположения скрытой неисправности железнодорожного пути

