Результат интеллектуальной деятельности: СПОСОБ КОРРЕКЦИИ И УСТРОЙСТВО ОРБИТАЛЬНОГО ГИРОКОМПАСА ДЛЯ УПРАВЛЕНИЯ УГЛОВЫМ ДВИЖЕНИЕМ КОСМИЧЕСКОГО АППАРАТА
Вид РИД
Изобретение
Предлагаемое изобретение относится к области космической техники и может быть использовано для повышения точности угловой ориентации космического аппарата (КА) с использованием орбитального гирокомпаса (ОГК).
В качестве аналога могут быть приняты способ и устройство ОГК КА (см. «Система ориентации и стабилизации изд. 14Ф133. Эскизный проект», с.122-124, рис. 19.7. ФГУП «НИИЭМ»). В этом решении в канале коррекции ОГК по курсу используют изодром, на вход которого подают измеренную разность сигналов прибора ориентации по Земле (ПОЗ) и ОГК в канале крена. При таком способе и устройстве коррекции ОГК устраняют ошибку ориентации КА в канале курса, но вместе с этим в канале крена происходит ухудшение точности - ошибка ориентации ОГК и вместе с ним ошибка ориентации КА увеличивается и становится равной ошибке ПОЗ в канале крена.
Известен также способ и устройство, в которых измерят и накапливают ошибки ориентации ОГК (КА) по крену и курсу и вводят их в контур стабилизации КА как поправки на ориентацию КА в виде постоянных смещений (Системы управления космических комплексов на базе орбитальной станции «Алмаз». Эскизный проект. Система ориентации, с. 6, 72, 188. «НПО Машиностроения». 1990 г.). Суть компенсации заключается в том, что в сигнале коррекции ОГК от ПМВ имеется информация об указанных ошибках в пропорциях, поддающихся простому масштабированию. В соответствии с этим сигнал коррекции измеряют и запоминают. В счетно-решающем приборе запомненный сигнал коррекции масштабируют пропорционально ошибкам в каналах курса и крена и подключают к соответствующим входам исполнительных органов КА, что приводит к смещению углов стабилизации КА по курсу и крену и компенсации, таким образом, ошибок ориентации. Указанный способ и реализующее его устройство имеет следующие существенные недостатки:
- ошибки ориентации не автокомпенсируются, а накапливаются и вводятся как смещения в контур стабилизации КА по крену и тангажу относительно ОГК при переводе ОГК в режим орбитальной гиропамяти;
- компенсируются не ошибки ОГК, а порождаемые ими ошибки КА, в указанном режиме эффект компенсации достигается только на коротком промежутке времени - несколько минут, потом ошибки начинают возрастать и через половину периода орбитального движения первоначальные ошибки ориентации КА удваиваются;
- система ориентации не чувствительна к медленноменяющимся ошибкам ПОЗ.
Наиболее близким аналогом может служить техническое решение, представленное в статье авторов Кэмпбел, Коффи «Цифровые системы отсчета углов». Журнал «Вопросы ракетной техники», 1971 г., №11, с. 63÷88. В нем рассматривается способ и устройство для управления угловым движением КА с использованием ОГК, в состав которого входит бесплатформенный гироскопический измеритель угловой скорости (БИУС), прибор ориентации по Земле (ПОЗ) и вычислитель.
В данном решении применяется способ коррекции ОГК для управления угловым движением КА, заключающийся в том, что для построения ориентации КА в каналах крена и курса измеряют разность сигналов ПОЗ и выходного сигнала ОГК в каналах крена - εγ, которую используют для коррекции показаний БИУС одновременно в каналах крена и курса.
Недостатком такого способа и связанного с ним устройства является то, что он не позволяет скомпенсировать ошибки ОГК по курсу и крену и соответствующие им ошибки ориентации КА по курсу и крену, возникающие из-за детерминированной ошибки ПОЗ по крену. Указанные ошибки ориентации будут составлять: 
где α, β - ошибки построения ОСК по крену и курсу соответственно, к1, к2 - коэффициенты коррекции ОГК в каналах курса и крена соответственно, Ω - орбитальная угловая скорость, Δγпоз - суммарная детерминированная и медленноменяющаяся ошибка ПОЗ в канале крена.
Целью предлагаемого решения является устранение указанных недостатков, т.е. создание способа коррекции и устройства ОГК повышенной точности для управления угловым движением КА с автоматической компенсацией (автокомпенсацией) ошибок ОГК как в канале курса, так и в канале крена относительно ОСК, вызванных детерминированными и медленноменяющимися ошибками ПОЗ по крену, включая ошибки установки ПОЗ на КА по крену относительно связанных осей.
Отличие предлагаемого решения заключается в том, что применяют новый способ коррекции ОГК в каналах крена и курса, при котором непосредственно в разностный (корректирующий) сигнал εγ - ПОЗ и ОГК в канале крена вводят сигнал автокомпенсации µγ, при этом новый сигнал коррекции ОГК uγ определяют в соответствии с формулами
 ;
;
 ;
;

где uγ - новый сигнал коррекции;
εγ - старый сигнал коррекции;
µγ - сигнал автокомпенсации;
γпоз - сигнал ПОЗ по крену;
Δγ - выходной сигнал ОГК по крену;
a 1,…a n - коэффициенты интегрирования;
n - степень, n не ограничивается.
Рассмотрим предлагаемое устройство, позволяющее реализовать новый способ коррекции ОГК.
Согласно решению в устройство угловой ориентации КА с использованием орбитального гирокомпаса по п.1, которое содержит ПОЗ, выход которого по каналу крена подключен к последовательно соединенным первому сумматору, первому модулю коррекции (МК), второму сумматору, третьему сумматору, первому интегратору, выход которого образует выход ОГК по каналу крена, выход первого же сумматора по каналу курса подключен к последовательно соединенным второму МК, четвертому сумматору, пятому сумматору, второму интегратору, выход которого образует выход ОГК по каналу курса, выход ПОЗ по каналу тангажа подключен к последовательно соединенным шестому сумматору, третьему МК, седьмому сумматору и третьему интегратору, выход которого образует выход ОГК по каналу тангажа, а также первый и второй модули компенсации взаимовлияний каналов (МКВК) и гироскопический блок измеритель угловой скорости (БИУС), при этом второй вход первого сумматора подключен к выходу первого интегратора, второй вход шестого сумматора подключен к выходу третьего интегратора, а вторые входы второго, четвертого и седьмого сумматоров подключены к выходам БИУС соответственно по крену, курсу и тангажу, а вторые входы третьего и пятого сумматоров подключены соответственно к выходам первого и второго МКВК, входы которых соединены с выходами второго и первого интеграторов соответственно, дополнительно в цепь первого сумматора введены n последовательно соединенных сумматоров, а также n последовательно соединенных интеграторов, при этом вход первого из n введенных сумматоров подключен к выходу первого сумматора, а выход n-го по счету сумматора подключен одновременно ко входу вновь введенного n-го по счету интегратора и входам первого и второго МК, а каждые выходы введенных интеграторов, начиная с n-ого интегратора, подключены ко вторым входам соответствующих по номерам вновь введенных сумматоров.
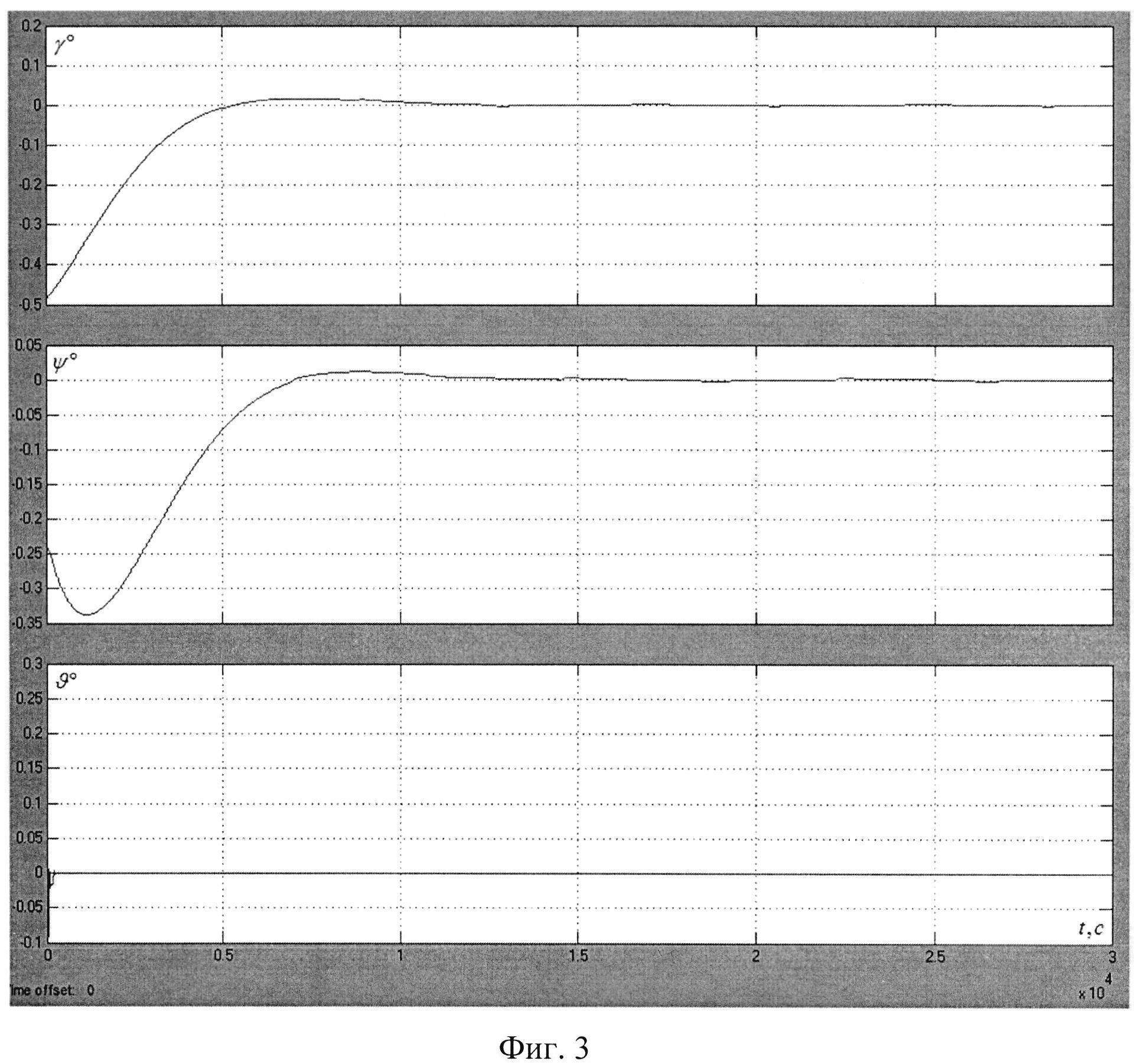
На фиг.1 показан пример реализации устройства. На приведенной структурно-функциональной схеме обозначено:
1 - ПОЗ с выходами по крену γПОЗ и тангажу ϑПОЗ соответственно;
2 - БИУС с измерительными осями угловых скоростей КА в проекциях на собственные оси: продольная ось X (по крену) - ωX, вертикальная ось Y (по курсу) - ωY и ось Z (по тангажу) тангажу - ωZ;
3-12 - сумматоры;
13-15 - вновь введенные сумматоры:, 13-й - первый, 15 - n-ый;
16-18 - интеграторы;
19-21 - вновь введенные интеграторы: 19-й - 1-й, …, 21-й - n-ый;
22-23 - модули коррекции (МК);
24-25 - модули компенсации взаимовлияний каналов (МКВК);
Δγ,  , Δψ,
, Δψ,  , Δϑ,
, Δϑ,  - выходы СО по углам и угловым скоростям соответственно по крену, курсу и тангажу, поступающие в контур стабилизации КА;
- выходы СО по углам и угловым скоростям соответственно по крену, курсу и тангажу, поступающие в контур стабилизации КА;
γПОЗ, ϑПОЗ - сигналы ПОЗ по крену и тангажу;
εγ, εϑ - сигналы коррекции ОГК по крену и тангажу соответственно;
µγ - сигнал автокомпенсации;
ωX, ωY, ωZ - сигналы БИУС, соответствующие проекциям абсолютной угловой скорости КА на связанные оси по крену, курсу и тангажу;
K1, K2, K3 - коэффициенты коррекции;
а 1…a n - коэффициенты автокомпенсации;
Ω - орбитальная угловая скорость КА.
Сигналы БИУС 2 интегрируются на интеграторах 16, 17, 18 и поступают в контур стабилизации КА по крену - Δγ, по курсу - Δψ и по тангажу - Δϑ. Для приведения КА к местной вертикали по крену и тангажу сигналы гироскопического датчика необходимо корректировать. С этой целью сигналы ПОЗ 1 и интегралы от угловых скоростей БИУС в каналах крена - Δγ и тангажа - Δϑ сравниваются на сумматорах 3 и 12, откуда разностные сигналы - εγ и εϑ через модули коррекции 22 и 23 соответственно поступают на сумматоры 7 и 9, где корректируют показания БИУС 2. Приведение ИСЗ по курсу в плоскость орбиты производится в режиме гирокомпасирования. Для этого разностный сигнал εγ (построителя вертикали ПОЗ 1 по крену и интегратора 16 - выход ОГК по крену) подается на модуль коррекции 23 в канале курса. Усиленный сигнал сравнивается с сигналом БИУС 2 на сумматоре 9 и подается на интегратор 17, на выходе которого формируется сигнал стабилизации ИСЗ по каналу курса - Δψ и осуществляется приведение КА в плоскость орбиты. В процессе приведения КА к орбитальной системе координат блоки МКВК 25 и 26 устраняют взаимовлияния каналов курса и крена (соответственно) вследствие возникающих проекций орбитальной угловой скорости на связанные оси крена и курса КА в процессе стабилизации КА по углам Δψ и Δγ.
Вновь введенные элементы - интеграторы 19, 20, 21, и сумматоры 13, 14, 15, и новые связи - позволяют полностью компенсировать указанные выше ошибки ОГК по курсу и крену и соответствующие им ошибки ориентации КА путем выработки сигнала автокомпенсации - µγ. Причем происходит это автоматически, т.е. ошибки автокомпенсируются.
Покажем это на примере. В соответствии с фиг.1 линеаризованные уравнения движения ОГК имеют вид:
 ;
;
 ;
;

 ;
;
 ;
;

где uγ - новый сигнал коррекции ОГК по крену;
εγ - старый сигнал коррекции ОГК по крену;
µγ - сигнал автокомпенсации;
γПОЗ - сигнал ПОЗ по крену;
Δγ - выходной сигнал ОГК по крену;
а 1…a n - коэффициенты интегрирования;
n - степень системы коррекции;
εϑ - сигнал коррекции ОГК по тангажу.
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
 ,
,
где дополнительно обозначено:
ψ, ϑ, γ,  ,
,  ,
,  - углы и угловые скорости КА относительно ОСК по курсу, тангажу и крену соответственно;
- углы и угловые скорости КА относительно ОСК по курсу, тангажу и крену соответственно;
α, θ, β - ошибки ориентации ОГК относительно ОСК по курсу, тангажу и крену соответственно;
ΔγПОЗ, ΔϑПОЗ - детерминированные инструментальные ошибки ПОЗ в каналах крена и тангажа соответственно, включая также ошибки установки ПОЗ на КА относительно связанных осей по крену и тангажу.
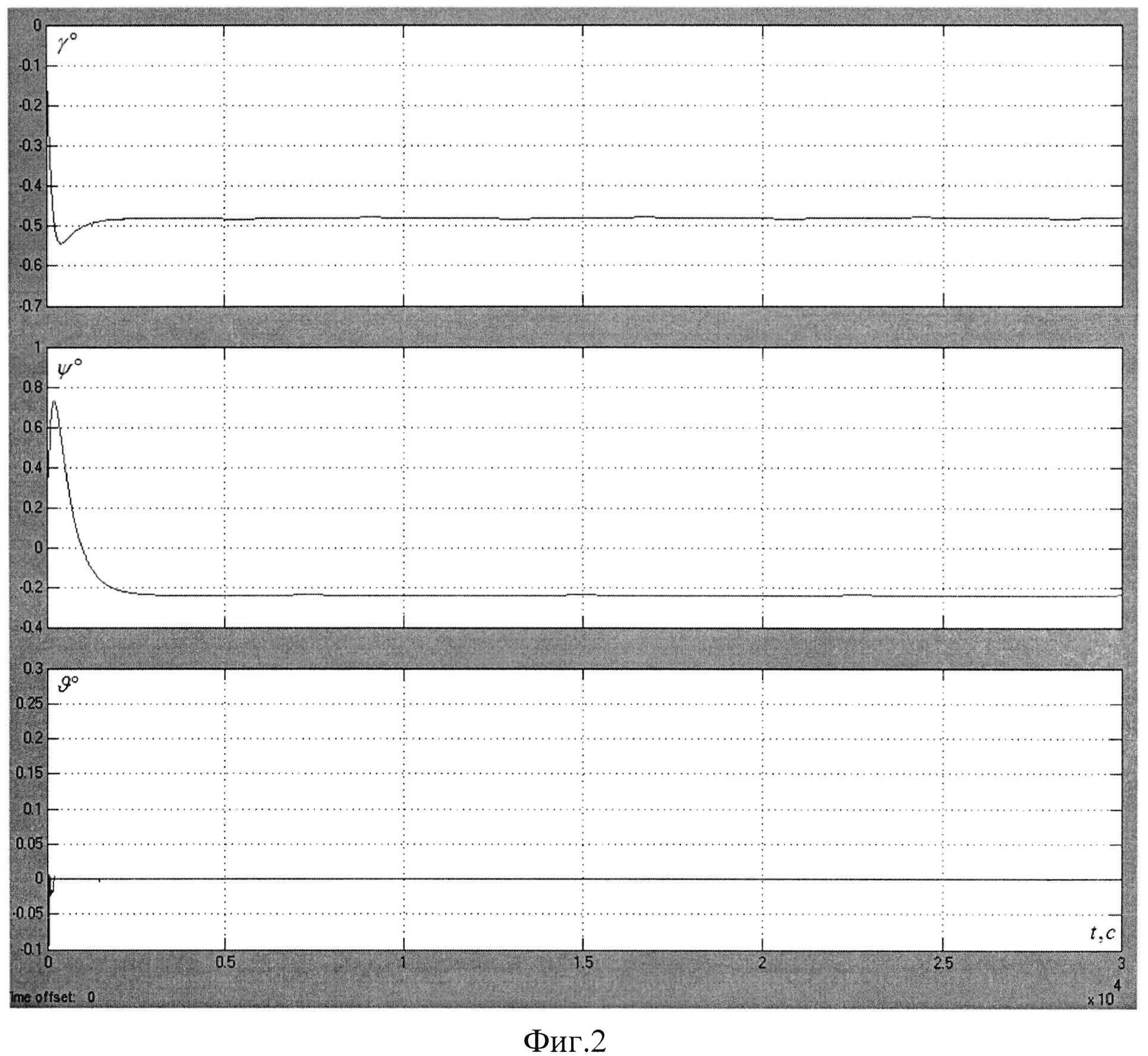
На фиг.2, 3 показаны результаты моделирования полных уравнений движения КА (в качестве исполнительных органов использовались двигатели-маховики).
На фиг.2 показано движение и установившиеся ошибки КА без элементов автокомпенсации (коэффициенты коррекции а 1…a n=о), при этом:
 ,
,  ,
,  , ΔγПОЗ=ΔϑПОЗ=0,5°=30 угл. мин.
, ΔγПОЗ=ΔϑПОЗ=0,5°=30 угл. мин.
Из приведенного графика видно, что при нулевых начальных условиях ориентации:

система ориентации после завершения переходных процессов (t→∞) под влиянием ошибки ПОЗ в канале крена ΔγПОЗ накапливает большие ошибки в каналах курса ψ и крена γ, аналитический вид которых и числовые значения следующие (канал тангажа является независимым и в дальнейшем не рассматривается):


При этом в канале курса ошибка ориентации КА составляет примерно половину ошибки ПОЗ по крену, а в канале крена ошибка ориентации КА практически равна полной ошибке ПОЗ по крену.
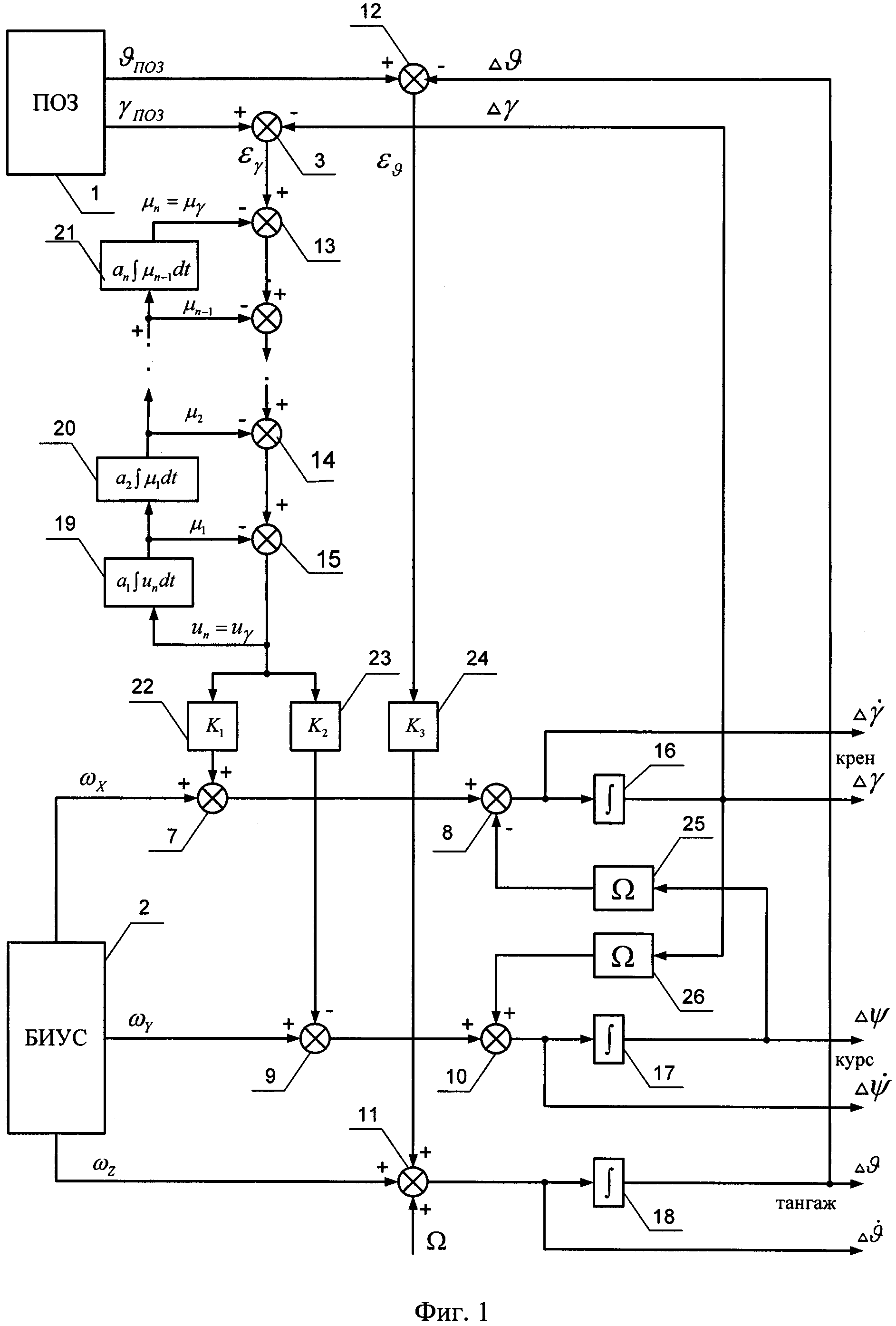
На фиг. 3 показаны графики ошибок КА с включенной автокомпенсацией  . Здесь для простоты взят случай для а
2…a
n=0, т.е. степень астатизма системы равна 1.
. Здесь для простоты взят случай для а
2…a
n=0, т.е. степень астатизма системы равна 1.
Из приведенного графика видно, что накопленные ранее ошибки (см. фиг. 2) после включения автокомпенсации стремятся к нулю в обоих каналах (крена и курса) и по завершению переходных процессов (t→∞) принимают нулевые значения:
ψ=α=0 угл. мин;
γ=β=0 угл. мин.
Таким образом, достигается полная и автоматическая компенсация детерминированных ошибок ориентации КА не только в канале курса, но и в канале крена.
Рассмотренный пример дан для n=1. С увеличением степени n улучшается амплитудно-частотная характеристика контура коррекции, но при этом усложняется синтез системы.
ОГК в режиме автокомпенсации абсолютно устойчив, что подтверждается теоретическими расчетами и приведенным моделированием на интервале времени 86400 с, что соответствует 16 виткам или 24 часам орбитального полета КА.
В общем случае характеристическое уравнение системы имеет вид:

где  оператор Лапласа,
оператор Лапласа,
 .
.
В соответствии с критерием Рауса-Гурвица система коррекции устойчива при любой степени - n, т.к. из характеристического уравнения непосредственно следует положительность всех коэффициентов при степенях s, при этом определители Рауса-Гурвица можно всегда подобрать положительными, т.к. коэффициенты bn=а 1…a n выбираются и назначаются произвольно, т.е. они не обременены собственными свойствами системы коррекции ОГК. В этой связи интересен случай, когда а 1…a n выбираются настолько малыми, что контур коррекции ОГК будет работать, практически не замечая влияния µγ на динамику движения. Тем не менее, автокомпенсация ошибок в каналах крена и курса со временем произойдет.
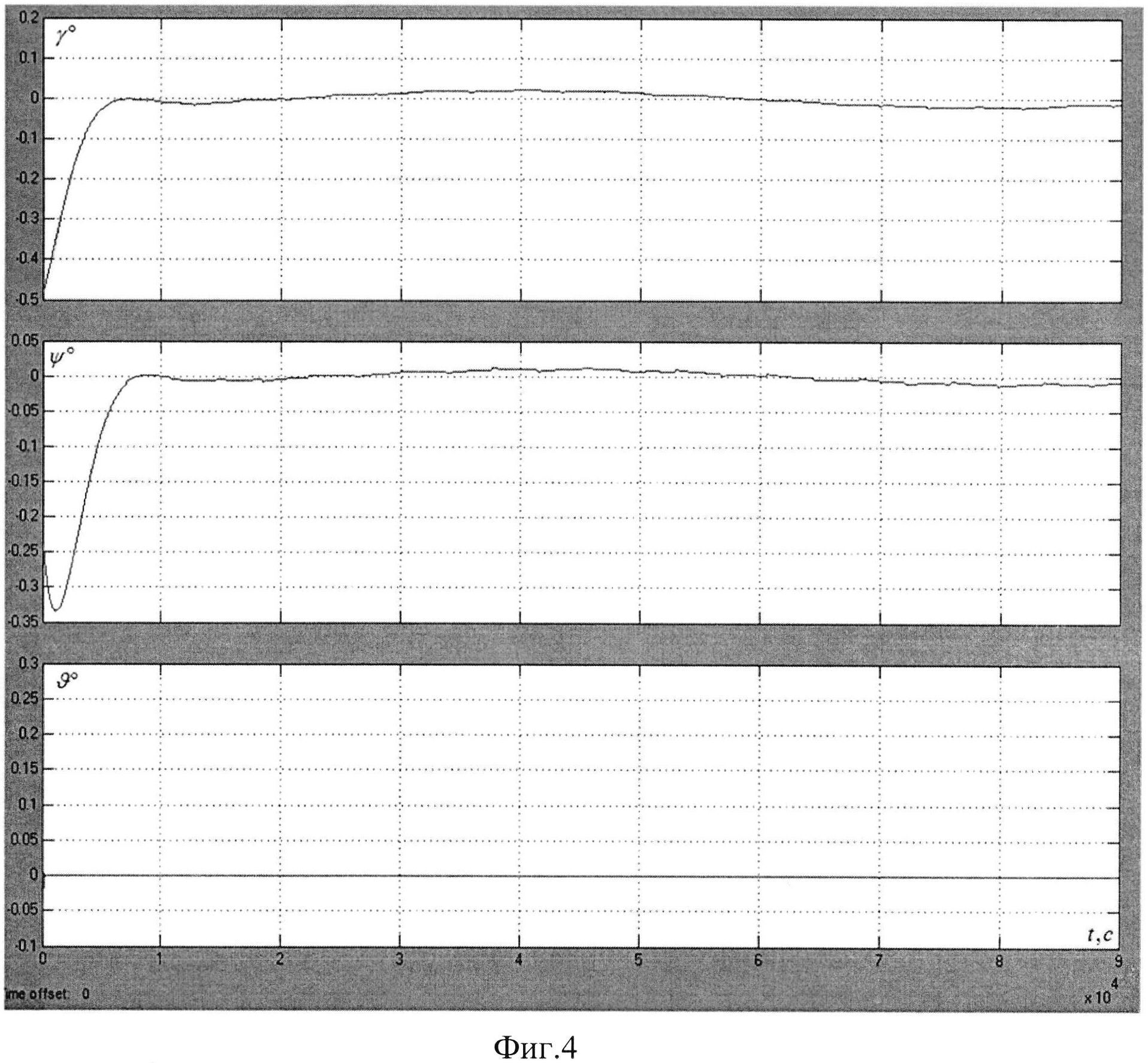
Ввиду того, что система чувствительна к детерминированным ошибкам ПОЗ в канале крена, включая ошибку установки ПОЗ относительно связанных осей КА, то будут автокомпенсироваться и медленноменяющиеся ошибки с периодами изменения значительно большими времени переходного процесса в контуре автокомпенсации, что вполне достаточно для практических целей. На фиг. 4 иллюстрируется автокомпенсация ошибок СО для случая медленноменяющейся гармонической ошибки ПОЗ, амплитуду которой положим раной 10% (0,05°) от начального значения (0,5°) детерминированной ошибки ПОЗ:  ,
,
т.е. в данном примере ПОЗ имеет постоянную и медленноменяющуюся (с частотой изменения в 10 раз меньшей частоты орбитального движения) ошибки.
Из результатов моделирования видно, что автокомпенсация воздействует на обе ошибки ориентации КА - по курсу и крену, полностью компенсирует постоянные составляющие ошибок и практически полностью устраняет их медленноменяющиеся составляющие.
Способ восстановления ориентации орбитального космического аппарата
Способ ориентации орбитального космического аппарата с программно-управляемыми батареями солнечными
Способ восстановления ориентации орбитального космического аппарата
Способ ориентации орбитального космического аппарата с программно-управляемыми батареями солнечными
Способ восстановления курсовой ориентации космического аппарата с использованием бесплатформенного орбитального гирокомпаса
Система восстановления курсовой ориентации космического аппарата с использованием орбитального гирокомпаса
Способ астроориентации орбитального космического аппарата (варианты)

