Результат интеллектуальной деятельности: ГИРОКОМПАСНАЯ СИСТЕМА ОРИЕНТАЦИИ ИСКУССТВЕННОГО СПУТНИКА ЗЕМЛИ
Вид РИД
Изобретение
Предлагаемое изобретение относится к области космической техники и может быть использовано при создании трехосной гирокомпасной системы ориентации (ГСО) ИСЗ для околокруговых орбит.
Наиболее близким аналогом может служить техническое решение, представленное в заявке №2012121440/28 от 25.05.2012 г. (Патент №2498216). В ней показана ГСО в составе: двухкоординатный инфракрасный построитель местной вертикали (ПМВ), трехосный блок датчиков угловых скоростей (БДУС) и вычислитель системы.
ГСО строит приборную орбитальную систему координат (ОСК) и при необходимости обеспечивает курсовые программные повороты на путевые углы в пределах 4°. Указанная система не обеспечивает курсовые повороты ИСЗ на неограниченные углы.
Целью предложения является обеспечение орбитальной ориентации ИСЗ при отработке заданных программных курсовых углов в пределах +/-180 градусов с сохранением непрерывности режима орбитального гирокомпасирования и точности системы в интересах работы целевой научной аппаратуры ИСЗ и коррекции высоты и наклона его орбиты.
Согласно предложению это достигается тем, что в известную ГСО, содержащую последовательно соединенные ПМВ по каналу крена, первый сумматор, первое усилительно-преобразующее устройство (УПУ), второй сумматор, второй вход которого подключен к БДУС по каналу крена, первый интегратор, выход которого подключен ко второму входу первого сумматора и к выходу ГСО по каналу крена, также последовательно соединенные второе УПУ, вход которого подключен параллельно со входом первого УПУ, третий сумматор, второй вход которого подключен к выходу БДУС по каналу курса, второй интегратор, выход которого подключен к выходу ГСО по каналу курса, и через первый задатчик орбитальной угловой скорости - к третьему входу второго сумматора, также последовательно соединенные ПМВ по каналу тангажа, четвертый сумматор, третье УПУ, пятый сумматор, второй вход которого подключен к БДУС по каналу тангажа, и третий интегратор, выход которого подключен ко второму входу четвертого сумматора и к выходу ГСО по каналу тангажа, причем выход первого интегратора подключен через второй задатчик орбитальной угловой скорости к третьему входу третьего сумматора, третий вход пятого сумматора подключен к третьему задатчику орбитальной угловой скорости, а выходы БДУС по каналам крена, курса и тангажа подключены к соответствующим выходам ГСО по угловым скоростям,
- введены: первый преобразователь координат (ПК1), первый и второй, третий и четвертый входы и соответствующие четыре выхода которого включены в выходные цепи ПМВ по каналам крена и тангажа и в выходные цепи БДУС по каналам крена и тангажа соответственно, второй ПК2, первый и второй входы и первый и второй выходы которого включены соответственно в выходные цепи ГСО по каналам крена и тангажа, задатчик программных курсовых углов, выход которого подключен к управляющим входам ПК1 и ПК2 и через дифференцирующее устройство к шестому сумматору, введенному в выходную цепь БДУС по каналу курса, задатчик проекций орбитальной угловой скорости на оси крена и тангажа ИСЗ, входы которого подключены к выходу задатчика программных курсовых углов и к третьему задатчику орбитальной угловой скорости, а два выхода по крену и тангажу подключены к седьмому и восьмому сумматорам, введенным в соответствующие выходные каналы ГСО.
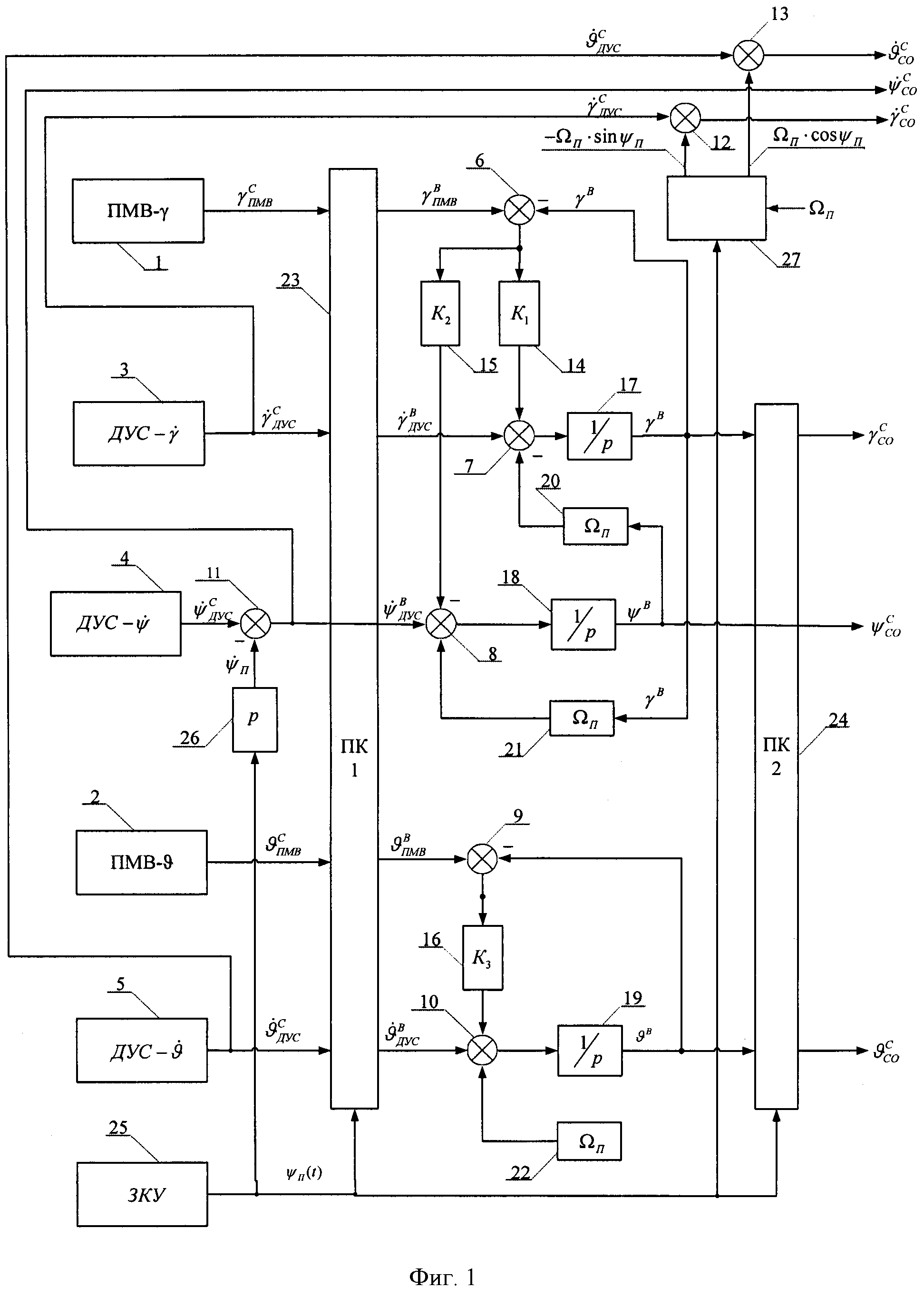
На фигуре 1 представлена структурно-функциональная схема ГСО.
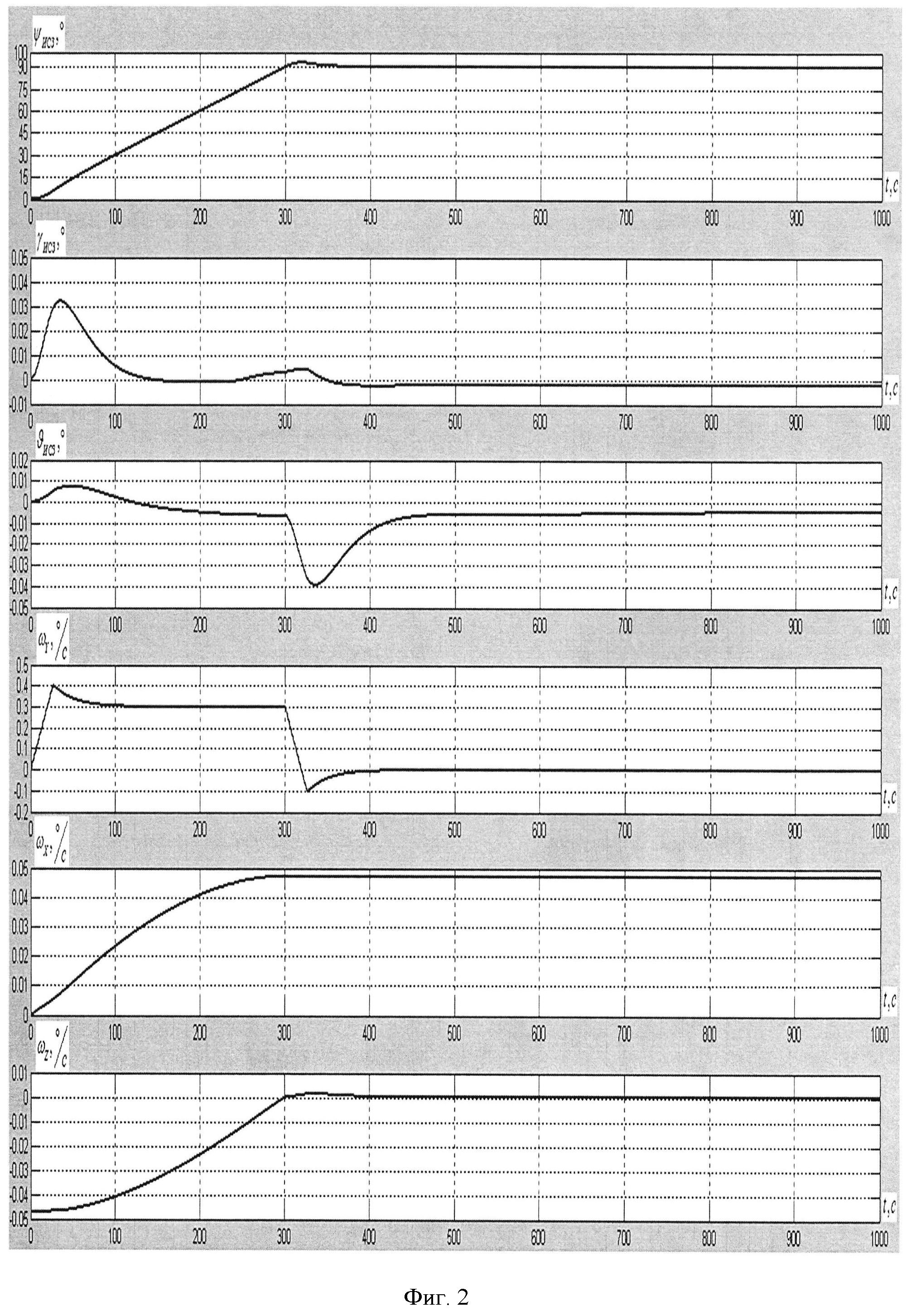
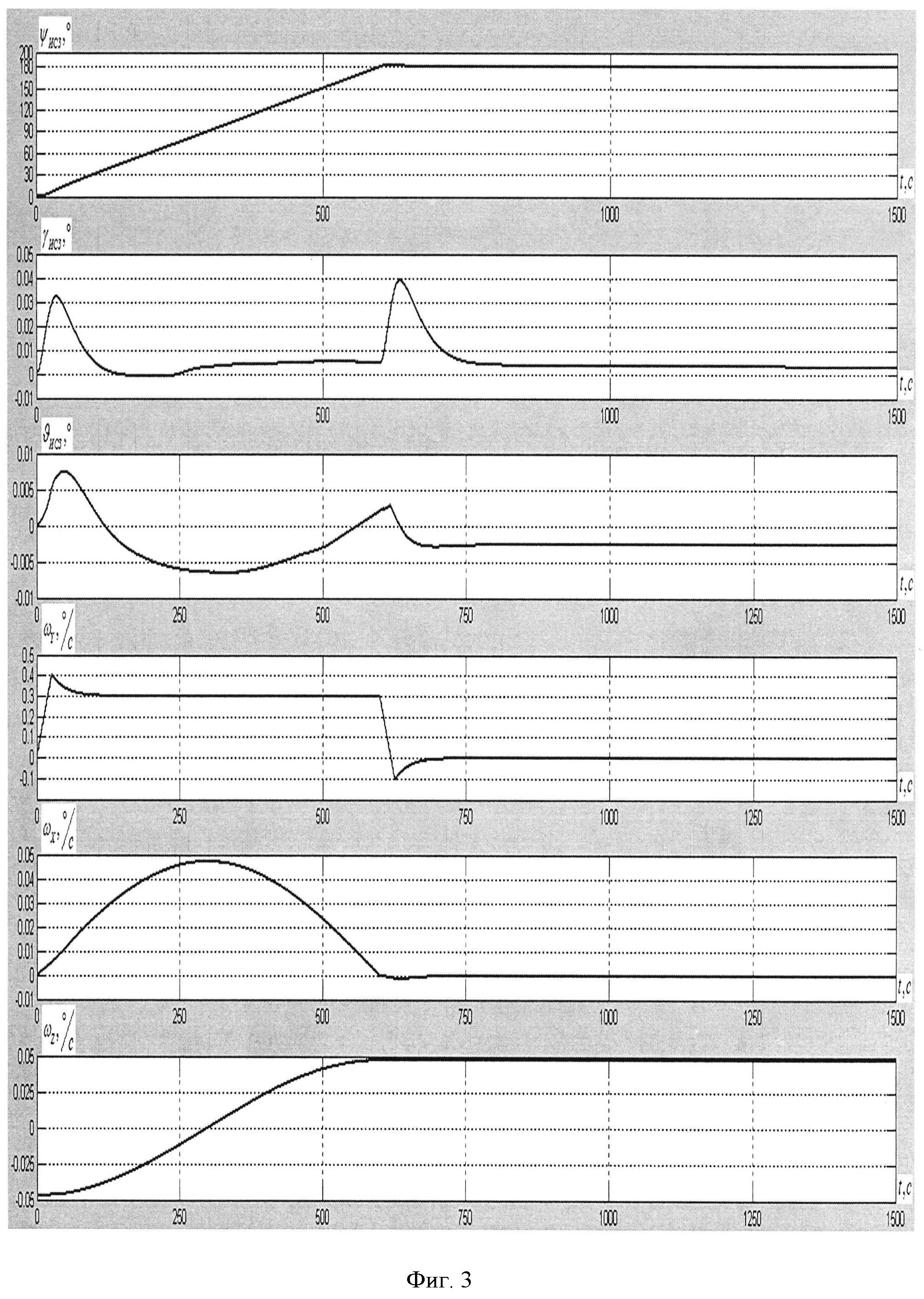
На фигурах 2, 3, 4 и 5 представлены графики текущих угловых параметров ИСЗ при программных курсовых поворотах.
На фигуре 1 обозначено:
1, 2 - инфракрасный построитель местной вертикали по каналам крена ПМВ-γ и тангажа ПМВ-ϑ соответственно;
3, 4, 5 - каналы гироскопического блока датчиков угловых скоростей БДУС по крену  , курсу
, курсу  и тангажу
и тангажу  соответственно;
соответственно;
6-13 - с первого по восьмой сумматоры соответственно;
14, 15, 16 - первое, второе и третье усилительно-преобразовательные устройства УПУ с передаточными коэффициентами К1, К2, К3 соответственно. Как вариант, УПУ 16 может быть выполнен в виде изодромного устройства: параллельно включенные усилитель и интегратор;
17, 18, 19 - первый, второй и третий интеграторы соответственно;
20, 21, 22 - первый, второй и третий задатчики программной орбитальной угловой скорости ΩП соответственно;
23, 24 - первый и второй преобразователи координат ПК1 и ПК2 соответственно;
25 - задатчик курсовых углов ЗКУ;
26 - дифференцирующее устройство (Р);
27 - задатчик проекций орбитальной угловой скорости по осям крена и тангажа ИСЗ.
Для удобства дальнейшего изложения все элементы СУД, кроме вновь введенных и датчиков первичной информации: ПМВ и ДУС, назовем вычислителем ГСО.
На фигуре 1 также обозначены:
 ,
,  - углы крена и тангажа, фиксируемые ПМВ в связанной с корпусом ИСЗ системе координат (ССК);
- углы крена и тангажа, фиксируемые ПМВ в связанной с корпусом ИСЗ системе координат (ССК);
 ,
,  - углы крена и тангажа ПМВ, приведенные с помощью ПК1 к приборной орбитальной системе координат ОХПУПZП для вычислителя;
- углы крена и тангажа ПМВ, приведенные с помощью ПК1 к приборной орбитальной системе координат ОХПУПZП для вычислителя;
 ,
,  ,
,  , - угловые скорости ИСЗ, формируемые ДУС по крену, курсу и тангажу соответственно относительно ССК;
, - угловые скорости ИСЗ, формируемые ДУС по крену, курсу и тангажу соответственно относительно ССК;
 ,
,  , - угловые скорости, формируемые ДУС крена и тангажа и приведенные с помощью ПК1 к приборной орбитальной системе координат для вычислителя; при этом угловая скорость по каналу курса относительно ОСК (без ПК1)
, - угловые скорости, формируемые ДУС крена и тангажа и приведенные с помощью ПК1 к приборной орбитальной системе координат для вычислителя; при этом угловая скорость по каналу курса относительно ОСК (без ПК1)  соответствует угловой скорости
соответствует угловой скорости  за вычетом угловой скорости
за вычетом угловой скорости  программного курсового поворота ИСЗ (см. фигуру 1);
программного курсового поворота ИСЗ (см. фигуру 1);
ΩП - программная орбитальная угловая скорость ИСЗ на орбите; ее номинальное значение равно среднему за виток значению фактической орбитальной скорости ΩО;
ψП - программный угол курса относительно ОСК, задаваемый как функция времени ψП(t);
 - скорость изменения задаваемого и отрабатываемого программного курсового угла, полученная с помощью дифференцирующего устройства 26;
- скорость изменения задаваемого и отрабатываемого программного курсового угла, полученная с помощью дифференцирующего устройства 26;
γВ, ψВ, ϑВ - выходные углы вычислителя ГСО по крену, курсу и тангажу соответственно относительно ОСК (без учета ψП);
 ,
,  - выходные углы ГСО по крену и тангажу после ПК2 соответственно, приведенные к связанной с ИСЗ системе координат;
- выходные углы ГСО по крену и тангажу после ПК2 соответственно, приведенные к связанной с ИСЗ системе координат;
 - выходной сигнал ГСО по курсу, минующий ПК2.
- выходной сигнал ГСО по курсу, минующий ПК2.
Вновь введенные блоки: ПК1 - 23, ПК2 - 24, ЗКУ - 25, дифференцирующее устройство (р) 26, задатчик проекций орбитальной угловой скорости 27 - построены на базе широко используемых элементов электронной техники.
В преобразователе координат ПК1 реализуются алгоритмы:
В преобразователе координат ПК2 реализуются алгоритмы:

Примечание. Вместе с преобразованием параметров, приведенных в (1, 2), аналогично преобразуются и их входящие составляющие:
 ,
,  ,
,  ,
,  ,
,  ,
,  и составляющие
и составляющие  ,
,  (11).
(11).
По каналу курса вне преобразователей координат ПК1 и ПК2:

Задатчик 27 проекций на оси крена и тангажа программного значения орбитальной угловой скорости ΩП вырабатывает поправки к выходным сигналам ГСО по скорости:
- по крену 
- по тангажу 
Выходные сигналы ГСО по угловым скоростям минуют ПК1 и ПК2 и соответствуют выражениям (см. фиг. 1):
 ;
;

 .
.
Работа предлагаемой ГСО совершается следующим образом.
В исходном состоянии при отсутствии заданного курсового угла система работает также, как работают известные ГСО без преобразователей координат. То есть ГСО строит модель приборной орбитальной системы координат ОХпУпZп, номинально совмещенную с текущей ОСК ОXoУoZo, и при работе системы угловой стабилизации соответствующие строительные оси корпуса ИСЗ OXcУcZc номинально совмещены с осями приборной орбитальной систем координат. Формирование выходных сигналов ГСО по крену и курсу осуществляется (см. фиг. 1) путем интегрирования соответствующих выходных сигналов ДУС крена и ДУС курса с предварительной их корректировкой сигналом разности углов ПМВ крена и выходного сигнала вычислителя ГСО по крену. Причем первичной информацией, поступающей в вычислитель ГСО, об отклонении оси чувствительности ДУС крена, совмещенной с продольной осью ИСЗ, от плоскости орбиты (по курсу), является составляющая сигнала ДУС крена, равная  . Знак этой составляющей проекции соответствует знаку угла отклонения ИСЗ по курсу от плоскости орбиты.
. Знак этой составляющей проекции соответствует знаку угла отклонения ИСЗ по курсу от плоскости орбиты.
Формирование выходного сигнала ГСО по тангажу осуществляется путем интегрирования выходного сигнала ДУС тангажа с предварительной коррекцией его сигналом разности углов ПМВ тангажа и выходного сигнала вычислителя ГСО по тангажу. Задатчики 20, 21, 22 программной орбитальной угловой скорости обеспечивают компенсацию влияния проекций текущей орбитальной угловой скорости ΩO на соответствующие оси ДУС-ов для приведения приборной системы координат к ОСК.
В соответствии с предложением работа ГСО в режиме курсового поворота ИСЗ продолжает совершаться следующим образом. С задатчика 25 программных курсовых углов выдается курсовой сигнал ψП(t), например со скоростью 0,3°/сек, который через дифференцирующее звено 26 и сумматор 11 вместе с сигналом  поступает на выход ГСО по угловой скорости
поступает на выход ГСО по угловой скорости  и на вход сумматора 8
и на вход сумматора 8  вычислителя ГСО. Система угловой стабилизации ИСЗ отрабатывает этот скоростной сигнал. При соответствующем повороте ИСЗ на выходе ДУС курса появится составляющая угловой скорости
вычислителя ГСО. Система угловой стабилизации ИСЗ отрабатывает этот скоростной сигнал. При соответствующем повороте ИСЗ на выходе ДУС курса появится составляющая угловой скорости , которая компенсирует программную угловую скорость
, которая компенсирует программную угловую скорость  , тем самым исключая ее влияние на стабильную работу вычислителя ГСО по поддержанию в вычислителе приборной ОСК.
, тем самым исключая ее влияние на стабильную работу вычислителя ГСО по поддержанию в вычислителе приборной ОСК.
Синхронно с поворотом ИСЗ функционируют («поворачиваются») оба преобразователя координат: ПК1 и ПК2.
Благодаря перераспределению сигналов в ПК1, вычислитель ГСО продолжает строить приборную ОСК, номинально совмещающуюся с фактической ОСК, так как во входные каналы крена вычислителя продолжают поступать от ПМВ и ДУС через ПК1 угловые параметры (1) поворота вертикальной курсовой оси ИСЗ перпендикулярно плоскости орбиты по крену, и во входные каналы тангажа вычислителя также продолжают поступать от ПМВ и ДУС через ПК1 угловые параметры поворота вертикальной оси ИСЗ по тангажу в плоскости орбиты. При наличии равенства и синхронности курсового поворота корпуса ИСЗ и угла «поворота» ПК1 в вычислителе ГСО сохраняется процесс устойчивого орбитального гирокомпасирования (без прямого влияния ψП). То есть до, при и после программных поворотов ИСЗ вычислитель ГСО продолжает строить (поддерживать) вычисленную приборную ОСК и выдавать соответствующую угловую информацию для стабилизации исходного или повернутого углового положения ИСЗ относительно ОСК.
Благодаря второму преобразователю координат ПК2, выходные сигналы вычислителя ГСО по крену и тангажу приводятся в соответствие с исполнительными органами угловой стабилизации ИСЗ. То есть обозначения и полярности выходных сигналов ГСО соответствуют одноименным осям системы угловой стабилизации ИСЗ. Тем самым обеспечивается устойчивость работы системы.
По окончании курсового поворота вычислитель ГСО продолжает строить приборную ОСК, номинально совмещенную с текущей ОСК при повернутом (ИСЗ) по курсу на заданный угол, и выдавать угловую информацию для угловой стабилизации ИСЗ относительно его повернутого положения. Поэтому фактическое угловое положение ИСЗ по курсу равно:

Формирование выходных сигналов ГСО, соответствующих угловым скоростям ИСЗ относительно приборной ОСК, выполняется по сигналам ДУС-ов с введением поправок (4) по каналам ДУС крена и ДУС тангажа, компенсирующих проекции вектора ΩO на оси чувствительности этих ДУС-ов при любых курсовых углах ИСЗ, с помощью задатчика 27 и сумматоров 12 и 13.
По курсовому каналу ДУС вводимый сигнал  (5) способствует процессу поворота ИСЗ.
(5) способствует процессу поворота ИСЗ.
Приведем математическое обоснование работоспособности ГСО.
1) Линеаризованные уравнения выходных сигналов вычислителя ГСО (см. фигуру 1) имеют вид:
 ;
;

 .
.
Наименования параметров системы приведены на стр. 3 и 4. Приведение сигналов ПМВ и ДУС по крену и тангажу из ССК в ОСК для вычислителя с помощью ПК1 показано в уравнениях (1). Во втором уравнении (7) программная угловая скорость  компенсируется соответствующей отрабатываемой скоростью
компенсируется соответствующей отрабатываемой скоростью  , в составе сигнала
, в составе сигнала  (11), фиксируемого в курсовом ДУС.
(11), фиксируемого в курсовом ДУС.
2) Первые два уравнения (7) взаимосвязаны перекрестными связями - ΩП·ψВ и ΩП·γВ, поэтому они рассматриваются совместно.
По правилу Крамера таблица (матрица) этих уравнений имеет вид:
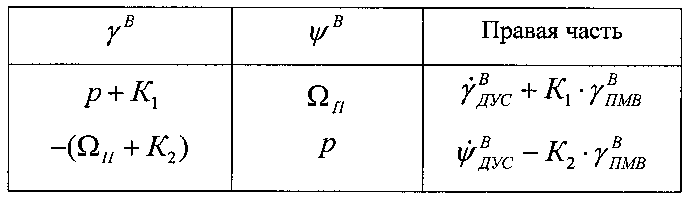
Главный определитель системы:

Система устойчива при положительных коэффициентах главного определителя системы, например при
 ,
,  ,
,  .
.
Частные определители системы по крену  и по курсу
и по курсу  , а также искомые углы γВ и ψВ равны:
, а также искомые углы γВ и ψВ равны:
 ;
;
 ;
;

 .
.
Решение третьего уравнения по тангажу системы (7) имеет вид:

3) Угловые параметры, приведенные в уравнениях (9) и (10), соответствуют выражениям:
 ;
;
 ;
;

 ;
;
 ,
,
где  ,
,  ,
,  ,
,  ,
,  - инструментальные погрешности приборов ПМВ и БДУС, приведенные ко входу вычислителя ГСО в ОСК в соответствии с уравнениями (1) для ПК1 и уравнением (3) по курсовому каналу;
- инструментальные погрешности приборов ПМВ и БДУС, приведенные ко входу вычислителя ГСО в ОСК в соответствии с уравнениями (1) для ПК1 и уравнением (3) по курсовому каналу;
 - угловая скорость программного поворота ИСЗ, фиксируемая
- угловая скорость программного поворота ИСЗ, фиксируемая  ; в установившемся режиме эта скорость компенсируется угловой скоростью
; в установившемся режиме эта скорость компенсируется угловой скоростью  задаваемого курсового угла для поворота ИСЗ.
задаваемого курсового угла для поворота ИСЗ.
В номинальном режиме ΩП=ΩO; 
При подстановке этих выражений в уравнения (9) и (10) получим выходные углы вычислителя ГСО по крену, курсу и тангажу относительно ОСК. В установившемся режиме (при р=0) эти углы равны:
 ;
;

 ,
,
где первые члены правой части уравнений характеризуют углы в приборной системе координат повернутого по курсу корпуса ИСЗ относительно ОСК, а вторые члены - погрешности определения этих углов.
Нетрудно показать, что для варианта УПУ 16, выполненного в виде изодромного устройства, погрешность ГСО по тангажу уменьшится:

4) Преобразование сигналов γВ и ϑВ в сигналы в связанной системе координат  ,
,  для передачи их в систему угловой стабилизации ИСЗ выполняется с помощью второго преобразователя координат ПК2 (2). По курсовому каналу без ПК2
для передачи их в систему угловой стабилизации ИСЗ выполняется с помощью второго преобразователя координат ПК2 (2). По курсовому каналу без ПК2  (см. фиг. 1).
(см. фиг. 1).
В соответствии с уравнениями (2), (11) и (13):

 .
.
При этом в соответствии с (6)  .
.
Конкретные выходные сигналы ГСО при ψП=0° и при повернутом положении ИСЗ на заданный курсовой угол, например ψП=90°, имеют следующий вид.
При ψП=0°:
 ;
;

 .
.
При ψП=90°:


 .
.
Аналогичные выражения углов ГСО можно получить при любых других программных курсовых углах.
Следует отметить, что обозначения и полярности выходных сигналов ГСО по крену, курсу и тангажу соответствуют крену, курсу и тангажу движения ИСЗ в связанной системе координат.
Из (15…17) видно, что во время курсовых поворотов ИСЗ в каналах крена и тангажа вычислителя ГСО происходит взаимозамена алгоритмов формирования выходных сигналов ГСО по крену и по тангажу и одновременная взаимозамена сигналов крена и тангажа ПМВ и сигналов крена и тангажа ДУС. Но, так как в соответствии с конструкторской документацией погрешности обоих каналов ПМВ по модулю равны и погрешности обоих каналов ДУС по модулю также равны, то и суммарные значения инструментальных погрешностей ГСО в установившемся режиме не превышают их расчетных значений до совершения поворотов.
5) Ниже приведены результаты математического моделирования работы ГСО при отработке заданных курсовых углов 90°, 180°, минус 90°, а также при отработке заданного путевого курсового угла

где АПУТ=4° - принятая амплитуда путевого угла;
t - время с началом отсчета в момент пересечения ИСЗ плоскости экватора из южного в северное полушарие Земли.
В качестве примера в схеме моделирования установлены
- параметры ГСО:  ,
,  ,
,  ,
, 
- скорость изменения задаваемого курсового угла:  ;
;
- время поворота соответствует отношению:  ;
;
- моменты инерции ИСЗ: JX=400 кг·м2; JY=950 кг·м2; JZ=650 кг·м2;
- параметры системы угловой стабилизации:
управляющее воздействие:  ; Kφ=2;
; Kφ=2;  ;
;
пусковой момент двигателя-маховика: 0,25 Н·м;
максимальный кинетический момент маховика: 10 Н·м·с.
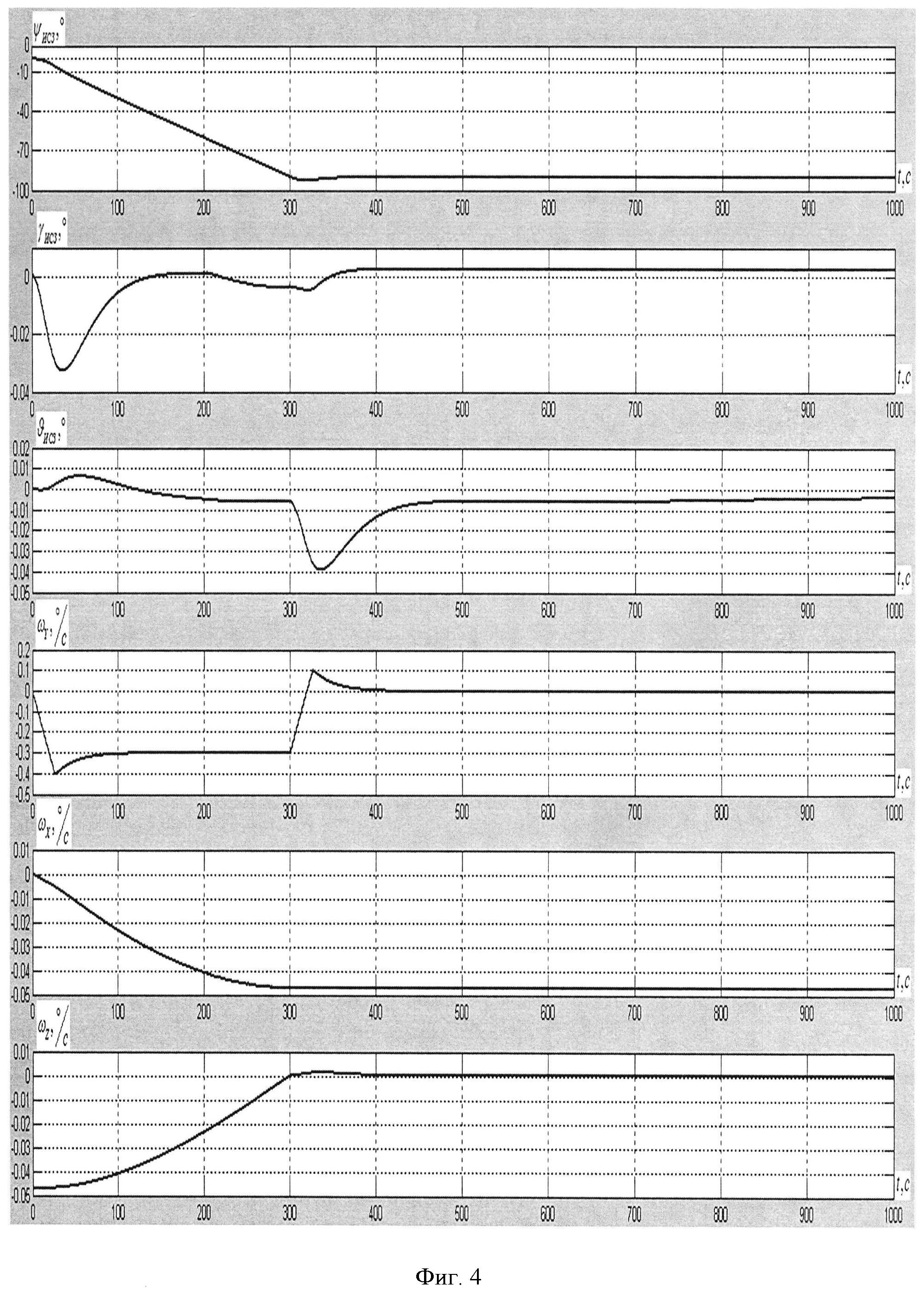
Графики изменения углов и угловых скоростей ИСЗ по курсу, крену и тангажу при отработке заданных курсовых углов 90, 180 и минус 90 град, при заданной угловой скорости 0,3 град/сек приведены на фигурах 2, 3 и 4 соответственно.
Из графиков видно, что
- ГСО в составе ИСЗ с системой угловой стабилизации (СС) работает устойчиво и обеспечивает заданные программные повороты в расчетное время;
- в начале и в конце программных поворотов по курсу наблюдается незначительное влияние на работу системы по крену и тангажу, объясняющееся запаздыванием СС при отработке управляющих сигналов ГСО. По той же причине и из-за инерционности ИСЗ наблюдаются незначительные запаздывания его углового движения и перерегулирования по курсу;
- плавные изменения сигналов ωX и ωZ в пределах 0,05 град/сек объясняются соответствующим изменением проекций вектора ΩO на оси чувствительности ДУС-ов крена и тангажа при повороте ИСЗ по курсу.
Графики изменения углов и угловых скоростей при отработке заданного путевого угла (18) приведены на фигуре 5.
Из этих графиков видно, что ИСЗ совершает курсовой поворот, соответствующий заданной функции (18), а по перекрестным каналам крена и тангажа продолжает стабилизироваться практически без влияния курсового поворота.
Таким образом, реализация предложенной гирокомпасной системы ориентации позволяет совершать программные курсовые повороты ИСЗ в пределах +/-180° как на фиксированные углы, так и на программно меняющиеся углы, например на гармонические курсовые путевые углы с сохранением непрерывности режима гирокомпасирования системы и ее точности в установившемся режиме.
Гирокомпасная система ориентации (ГСО) искусственного спутника Земли (ИСЗ), содержащая последовательно соединенные инфракрасный построитель местной вертикали (ПМВ) по каналу крена, первый сумматор, первое усилительно-преобразующее устройство (УПУ), второй сумматор, второй вход которого подключен к блоку гироскопических датчиков угловых скоростей (БДУС) по каналу крена, первый интегратор, выход которого подключен ко второму входу первого сумматора и к выходу ГСО по каналу крена, также последовательно соединенные второе УПУ, вход которого подключен параллельно со входом первого УПУ, третий сумматор, второй вход которого подключен к БДУС по каналу курса, второй интегратор, выход которого подключен к выходу ГСО по каналу курса и через первый задатчик орбитальной угловой скорости к третьему входу второго сумматора, также последовательно соединенные ПМВ по каналу тангажа, четвертый сумматор, третье УПУ, пятый сумматор, второй вход которого подключен к БДУС по каналу тангажа, и третий интегратор, выход которого подключен ко второму входу четвертого сумматора и к выходу ГСО по каналу тангажа, причем выход первого интегратора подключен через второй задатчик орбитальной угловой скорости к третьему входу третьего сумматора, третий вход пятого сумматора подключен к третьему задатчику орбитальной угловой скорости, а выходы БДУС по каналам крена, курса и тангажа подключены к соответствующим выходам ГСО по угловым скоростям,отличающаяся тем, что в нее введены: первый преобразователь координат (ПК1), первый и второй, третий и четвертый входы и соответствующие четыре выхода которого включены в выходные цепи ПМВ по каналам крена и тангажа и в выходные цепи БДУС по каналам крена и тангажа; второй ПК2, первый и второй входы и первый и второй выходы которого включены соответственно в выходные цепи ГСО по каналам крена и тангажа, задатчик программных курсовых углов, выход которого подключен к управляющим входам ПК1 и ПК2 и через дифференцирующее устройство к шестому сумматору, введенному в выходную цепь БДУС по каналу курса, задатчик проекций орбитальной угловой скорости на оси крена и тангажа ИСЗ, входы которого подключены к выходу задатчика программных курсовых углов и третьему задатчику орбитальной угловой скорости, а выходы по крену и тангажу присоединены к седьмому и восьмому сумматорам, введенным в соответствующие выходные каналы ГСО угловым скоростям.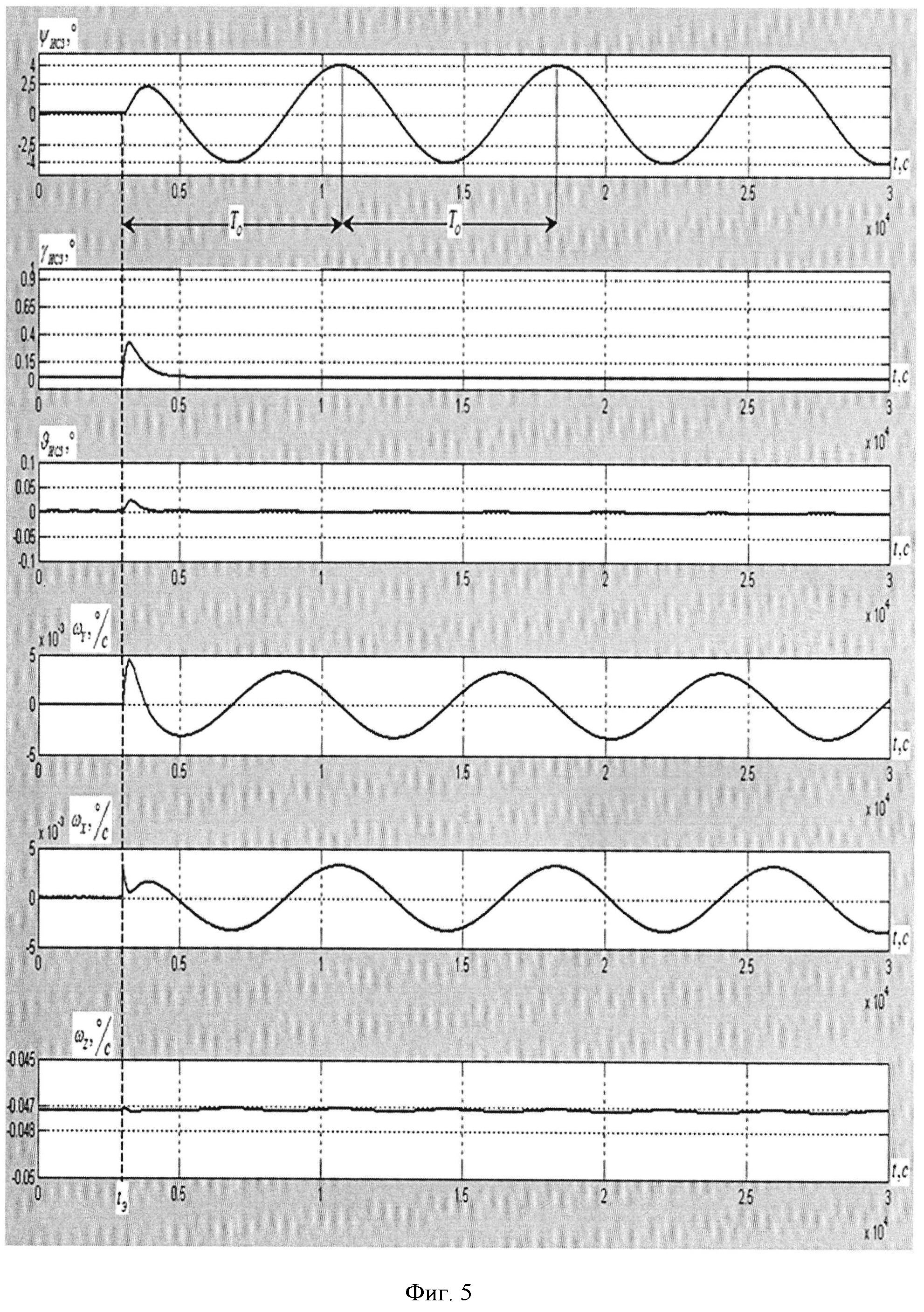
Способ нанесения защитного покрытия на детали из алюминиевых сплавов
Способ группового орбитального движения искусственных спутников
Способ ориентации орбитального космического аппарата с программно-управляемыми батареями солнечными
Способ ориентации космического аппарата и устройство для реализации способа
Способ сброса кинетического момента инерционных исполнительных органов космического аппарата и устройство для реализации способа
Способ нанесения защитного покрытия на детали из алюминиевых сплавов
Способ группового орбитального движения искусственных спутников
Способ ориентации орбитального космического аппарата с программно-управляемыми батареями солнечными
Способ ориентации космического аппарата и устройство для реализации способа
Способ сброса кинетического момента инерционных исполнительных органов космического аппарата и устройство для реализации способа
Способ восстановления курсовой ориентации космического аппарата с использованием бесплатформенного орбитального гирокомпаса
Способ и устройство управления движением космического аппарата с управляемой ориентацией
Устройство формирования механического момента электромагнитом в магнитной системе ориентации космического аппарата
Устройство управления движением космического аппарата для очистки космоса от мусора
Система восстановления курсовой ориентации космического аппарата с использованием орбитального гирокомпаса

