Результат интеллектуальной деятельности: СПОСОБ ОПРЕДЕЛЕНИЯ ТЕНЗОРА ИНЕРЦИИ ТЕЛА
Вид РИД
Изобретение
Изобретение относится к измерению физических величин и может быть использовано в машиностроении, динамических расчетах пространственных механизмов, робототехнике, авиастроении.
Цель изобретения - расширение номенклатуры исследуемых объектов и повышение точности измерения.
Технический результат изобретения - определение тензора инерции тел, для которых не применима модель твердого тела и способных к возбуждению пространственных колебаний и деформациям от инертных нагрузок в процессе испытаний.
Известен способ определения тензора инерции тела и устройство для его осуществления, согласно которому исследуемому объекту задается реверсивно-симметричное сферическое вращение вокруг неподвижной точки (патент РФ №2436055, МПК G01M 1/10, опубл. 10.12,2011, Бюл. №34).
Для определения осевых моментов инерции измеряют три физических параметра: угол поворота, скорость и электрический ток.
Недостаток способа состоит в кинематическом возбуждении пространственных колебаний объекта из-за реверсивно-симметричного двухосного сферического движения. Чередование положительных и отрицательных угловых ускорений объекта способствует тому, что он раскачивается под действием собственных инертных сил. В результате возрастает погрешность измерения.
Наиболее близким к изобретению является способ определения центрального осевого момента инерции, координат центра масс в заданной плоскости и массы тела (патент РФ №1046633, МПК G01M 1/10, опубл. 07.10.1983, Бюл. №37). Способ заключается в сообщении исследуемому телу колебательного движения вокруг вертикальной оси, а по периоду колебаний определяют центральный осевой момент инерции, центр масс и массу тела.
Недостаток способа в колебательном тестовом движении, сообщаемом телу, и, как следствие, недостаточная точность определения инерционных характеристик тела. Если этот объект - тонкостенная деформируемая корпусная деталь или пространственная ферма, для которых не применима модель твердого тела, то она приобретает в процессе таких испытаний свойство самостоятельной колебательной системы, присоединенной к измерительному стенду.
Ограниченная пространственная жесткость исследуемой детали в процессе испытаний может приводить к изменению ее геометрической формы. Все это снижает точность измерения осевых моментов инерции.
В предлагаемом способе предлагается решение задачи определения тензора инерции тела путем расширения номенклатуры измеряемых объектов и повышения точности измерения за счет исключения знакопеременных ускорений в задаваемом тестовом законе движения. Это достигается сообщением объекту ускоренного вращения вокруг неподвижной оси с постоянным по знаку угловым ускорением. Ускорение определяется в любой момент времени измерением последовательности трех интервалов времени поворота объекта на заданные углы поворота [1]. Движущий крутящий момент определяют по углу закручивания торсионного вала с использованием двух фотоэлектрических датчиков [2].
Существо способа заключается в том, что платформе с объектом сообщают вращательное движение вокруг вертикальной оси с помощью торсионного вала, измеряют интервалы времени для каждого фиксированного положения тела на платформе и определяют осевой центральный момент инерции, а для шести ориентированных в пространстве положений тела на платформе определяют шесть осевых центральных моментов инерции, по которым рассчитывают компоненты тензора инерции тела, после чего платформе с объектом задают ускоренное вращение с постоянным по знаку угловым ускорением, в процессе которого определяют три последовательных интервала времени поворота объекта на заданные углы поворота, а крутящий момент определяют по углу закручивания торсионного вала.
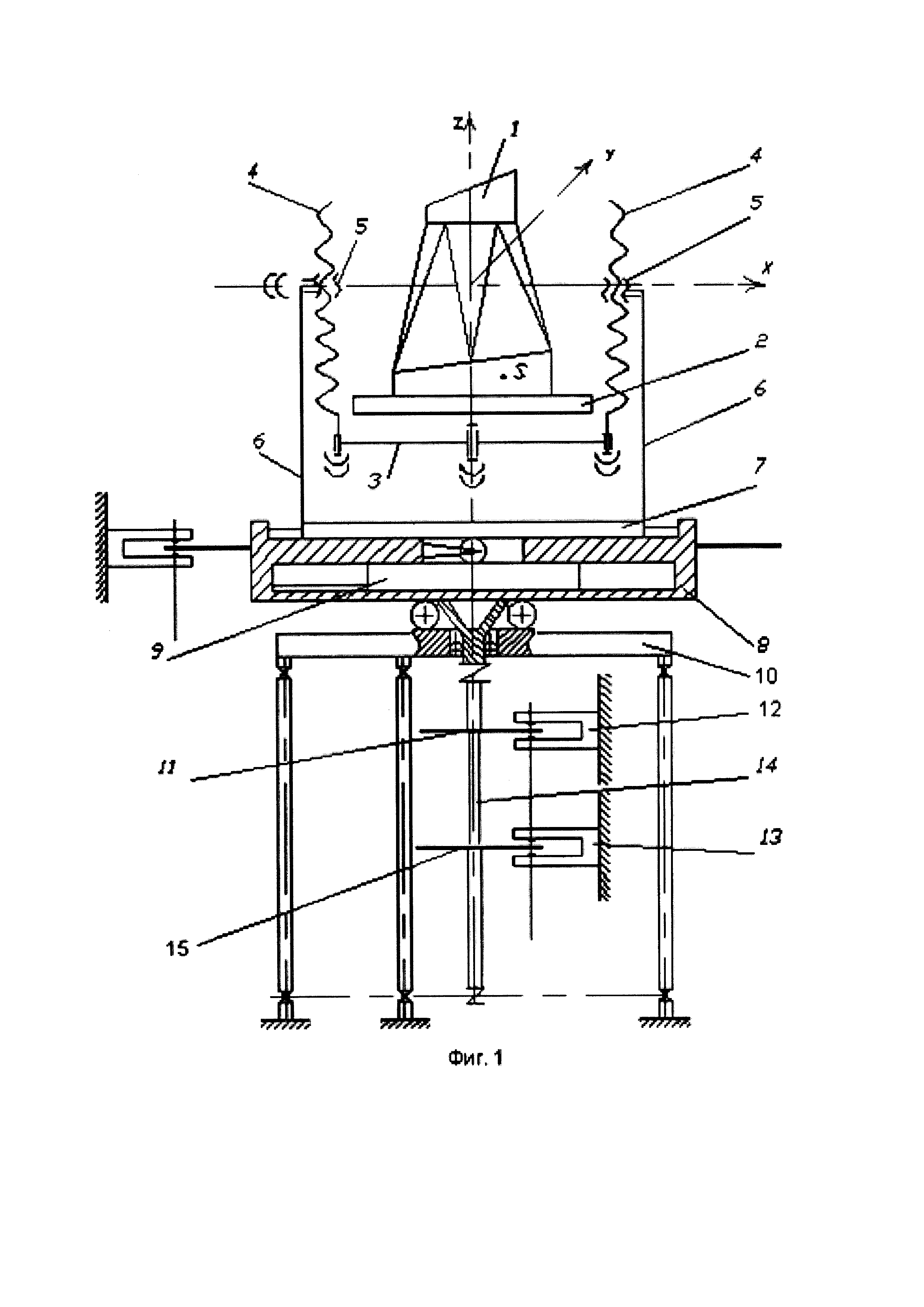
Суть предлагаемого способа раскрывается с помощью стенда, представленного на фиг. 1-3, а на фиг. 4 показана система выбранных координат.
Стенд (фиг. 1) включает в себя следующие элементы:
1 - объект измерения;
2 - платформа для установки объекта;
3 - подвижный поворотный кронштейн;
4 - несущие винтовые тяги;
5 - винтовые гайки;
6 - стойки;
7 - каретка;
8 - поворотная платформа;
9 - подвижный груз;
10 - подвижное основание;
11 - диск с метками;
12, 13 - фотоэлектрические датчики;
14 - торсионный вал;
15 - диск с метками.
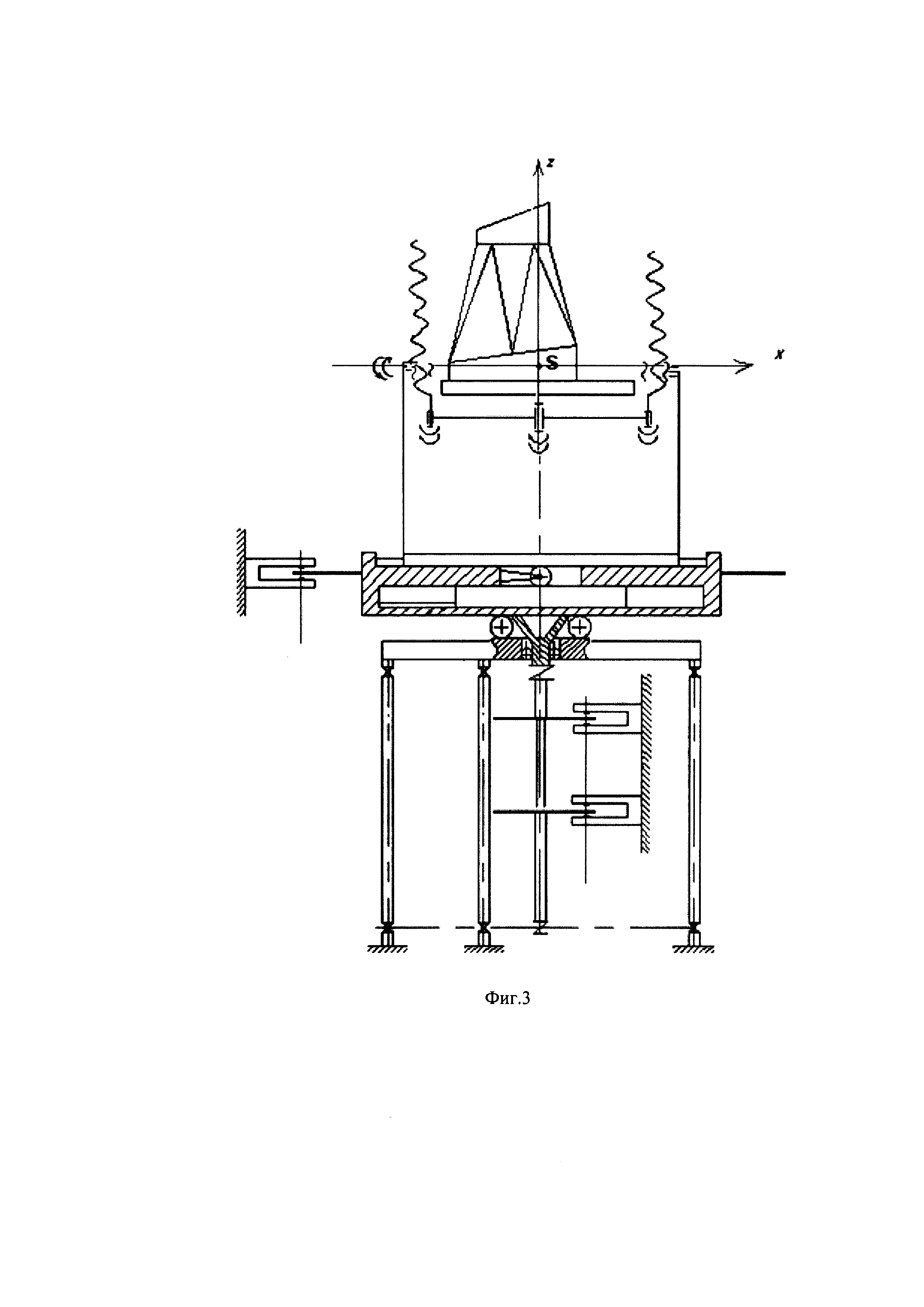
На фиг. 1, 2 и 3 показаны разные временные стадии измерений.
Определение тензора инерции тела проводится поэтапно: в начале определяют любым известным методом массу и координаты центра масс тела в заданной плоскости, затем на стенде (Фиг. 1) по крутящим моментам и соответствующим угловым ускорениям определяют шесть осевых центральных моментов инерции, по которым вычисляются компоненты тензора инерции согласно методике, изложенной в работе [3].
Три из шести осей выбираются так, что они являются биссектрисами трех прямых углов, образованных тремя другими взаимно ортогональными осями. Такой выбор осей упрощает определение трех центробежных моментов инерции.
Объекту задается ускоренное вращение вокруг оси Z с постоянным по знаку ускорением. Максимальное угловое ускорение ε в такой постановке эксперимента может легко регулироваться. Постоянный по направлению характер инертных сил не вызывает возбуждение колебаний, а для исключения деформаций объекта на платформе 2 могут располагаться подводные опоры симметрично относительно оси вращения.
Для определения массы объекта 1 и координат центра масс (фиг. 1) его помещают на внутреннюю платформу 2, которая способна поворачиваться на углы 45° и 90° вокруг своей оси и фиксироваться в каждом из указанных угловых положении. На фиг. 1 это ось Z, совпадающая с осью вращения.
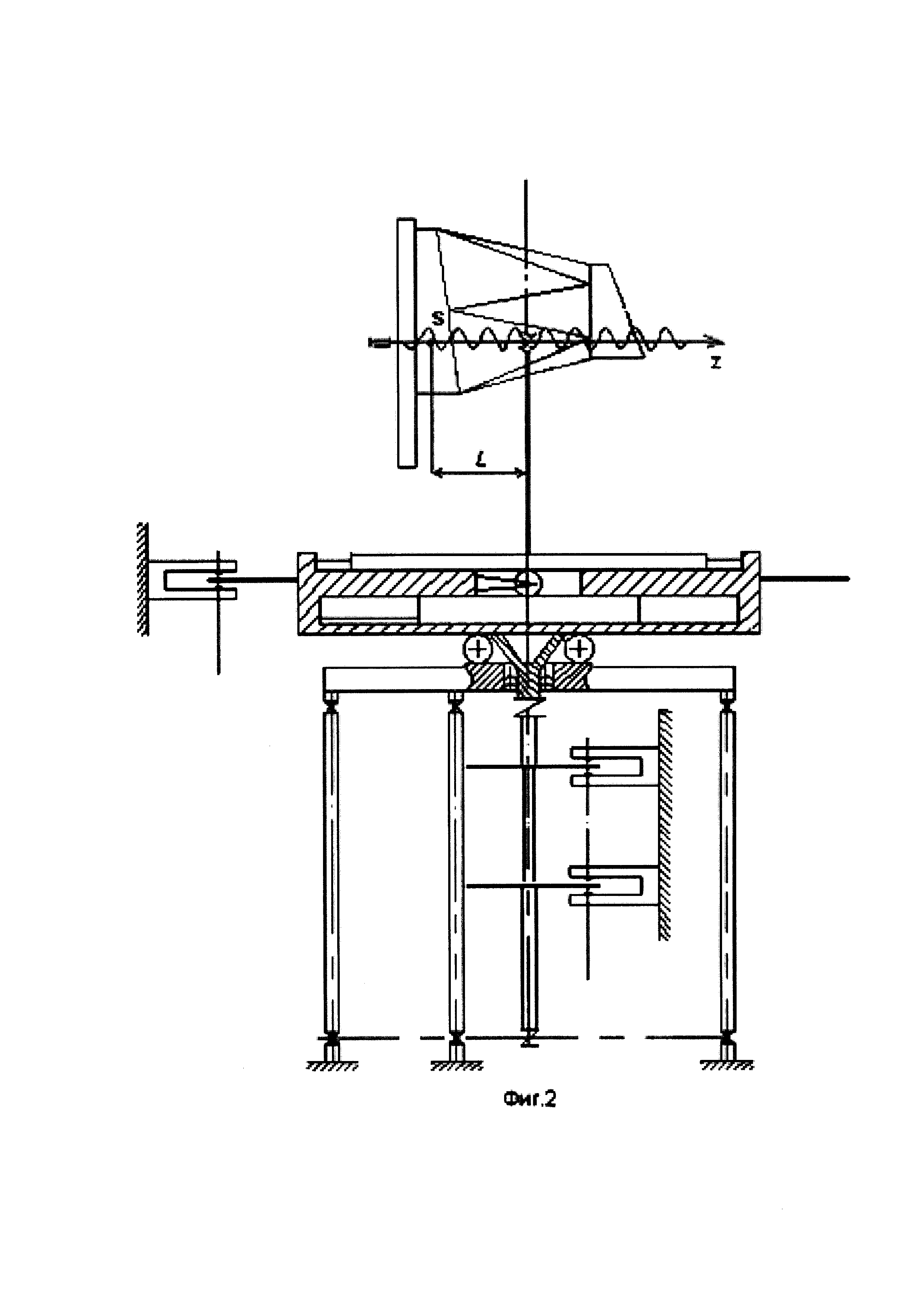
Платформа 2 крепится на подвижном поворотном кронштейне 3, способном поворачиваться вокруг горизонтальной оси X, также перемещаться в вертикальном направлении с помощью двух несущих винтовых тяг 4, которые при вращении относительно гаек 5 перемещают внутреннюю платформу 2 в вертикальном направлении на любую заданную величину. Гайки 5 закреплены на двух стойках 6, которые базируются на каретке 7. Каретка 7 сможет перемещаться прямолинейно на поворотной платформе 8 и фиксироваться в заданном положении. Перемещение каретки и подвижный груз 9 необходимы для определения массы и координат центра масс S тела в соответствии с применяемым методом. Определив положение центра масс S в плоскости платформы 2, необходимо определить его положение в вертикальном направлении (вдоль оси Z). Для этого центр масс S совмещают с осью Z, перемещая объект 1 на платформе 2, закрепляют в этом положении, и затем поворачивают кронштейн 3 с платформой 2 и объектом 1 вокруг оси X на 90°, фиксируют в этом положении, и повторяют уже известный алгоритм определения положения центра масс (фиг. 2). Так определяется расстояние L от центра масс до горизонтальной оси X. В итоге известно положение центра масс S на оси Z. Объект с кронштейном возвращаются в исходное положение.
Следующим этапом является определение осевых центральных моментов инерции.
Вращением винтовых тяг 4 совмещается центр масс S с точкой пересечения осей Z и X (фиг. 3). Подвижное основание 10 закрепляется в исходном положении неподвижно. От двигателя через торсионный вал 14 платформе 8 задается ускоренное вращение.
Угловое ускорение ε для расчета осевого момента инерции определяется хронометрическим методом по результатам измерения трех последовательных интервалов времени [1, 2]:
Δtj-2,j-1 - время поворота от метки с номером j-2 до метки с номером j-1;
Δtj-1,j - время поворота от метки с номером j-1 до метки с номером j;
Δtj,j+1 - время поворота от метки с номером j до j+1, j=1, 2...N,
где N - число меток на диске 11 [2].
Интервалы времени измеряются фотоэлектрическим датчиком 12. Светонепроницаемые метки на диске нанесены равномерно и так, что угол поворота диска 11 на угол Δφ=2π/N между двумя соседними метками равен ~10-3-10-5 рад. Угловые скорости ωj-1, ωj и ωj+1 рассчитываются по формулам:
 ,
,  ,
,  ,
,
а угловое ускорение ε - из соотношения:
Для углового ускорения εj в позиции j указанное соотношение имеет вид:
Активный крутящий момент инерции Mj определяют как произведение разности угловых показаний δφj двух фотоэлектрических датчиков 12 и 13 (для позиции j датчика 12) на угловую жесткость С торсионного вала 14 по формуле:
Mj=δφjC,
где Mj - крутящий момент;
δφj - угол, рад;
С - коэффициент жесткости торсионного вала.
Осевой момент инерции определяют по формуле:
J=Mj/εj,
где Mj - крутящий момент;
εj - угловое ускорение.
Организация измерения интервалов времени фотоэлектрическим методом и крутящего момента в дискретной форме автоматически решают задачу синхронизации измерения ускорения εj и момента Mj, поскольку показания датчика 12 используются одновременно для расчета Mj и εj.
С объектом 1 жестко связывается система координат XYZ с началом в центре масс S (фиг. 3). Определив осевой центральный момент инерции Jz, аналогично определяют осевые центральные моменты инерции Jx и Jy, совмещая оси X и Y с вертикальной осью вращения. Например, для определения момента инерции Jx платформа 2 поворачивается на 90° вокруг оси Z и фиксируется в этом положении, а кронштейн 3 поворачивается вокруг горизонтальной оси на 90° и также фиксируется. Ось X заняла вертикальное положение и совмещена с осью вращения.
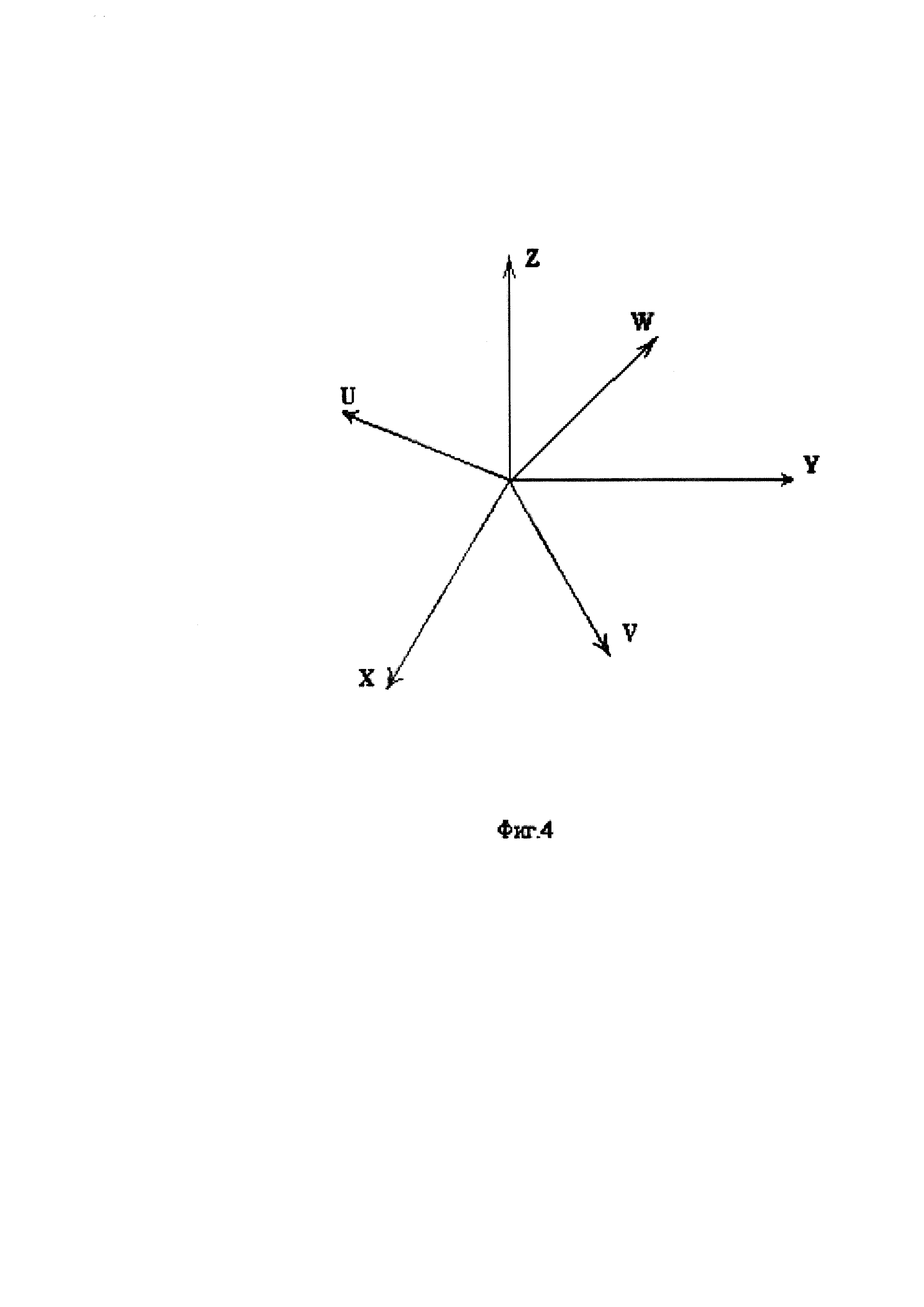
Определив экспериментально три центральных осевых момента инерции Jx, Jy, Jz, определены три компоненты искомого тензора инерции. Три центробежных момента инерции можно определить, как следует из работы [3], пересчетом, измерив еще три осевых центральных момента относительно осей V, W, U, являющихся биссектрисами углов, образованных положительными направлениями осей координат XYZ (фиг. 4). Например, ось V - биссектриса прямого угла между осями X и Y, а ось U - между осями X и Z.
Для определения осевых моментов инерции Jw, Ju, Jv необходимо последовательно совмещать каждую из осей W, U и V с осью вращения и определять соответствующий осевой момент инерции. Например, чтобы ось V совпала с осью вращения, необходимо повернуть платформу 2 на 45° и повернуть кронштейн 3 вокруг горизонтальной оси на 90° и зафиксировать это положение. Задавая ускоренное вращение и определив M и ε, находится осевой центральный момент инерции Jv. Аналогично измеряются осевые центральные моменты инерции Jw, Ju.
Согласно теореме, установленной в работе [3], центробежные моменты инерции Jxy, Jyz, Jxz рассчитываются по известным осевым моментам инерции по формулам: Jxy=(Jx+Jy)/2-Jv, Jyz=(Jy+Jz)/2-Jw, Jxz=(Jx+Jz)-Ju.
Получены все компоненты тензора инерции тела.
Источники информации
1. Патент №2460050 С1, Россия, MKU G01M 1/10 «Способ определения приведенного момента инерции механизма» Алешин А.К. Заявл. 31.03.2011; опубл. 27.08.2012, Бюл. №24
2. Киселев М.И. и др. Измерение периода вращения привода вала турбоагрегата фотоэлектрическим методом. // Измерительная техника. 1996. №12. С. 28-29.
3. Гернет М.М., Ратобыльский В.Ф. Определение моментов инерции. - М: Машиностроение, 1969. - 246.
Способ определения тензора инерции тела, заключающийся в том, что платформе с объектом сообщают вращательное движение вокруг вертикальной оси с помощью торсионного вала, измеряют интервалы времени для каждого фиксированного положения тела на платформе и определяют осевой центральный момент инерции, а для шести ориентированных в пространстве положений тела на платформе определяют шесть осевых центральных моментов инерции, по которым рассчитывают компоненты тензора инерции тела, отличающийся тем, что платформе с объектом задают ускоренное вращение с постоянным по знаку угловым ускорением, в процессе которого определяют три последовательных интервала времени поворота объекта на заданные углы поворота, а крутящий момент определяют по углу закручивания торсионного вала.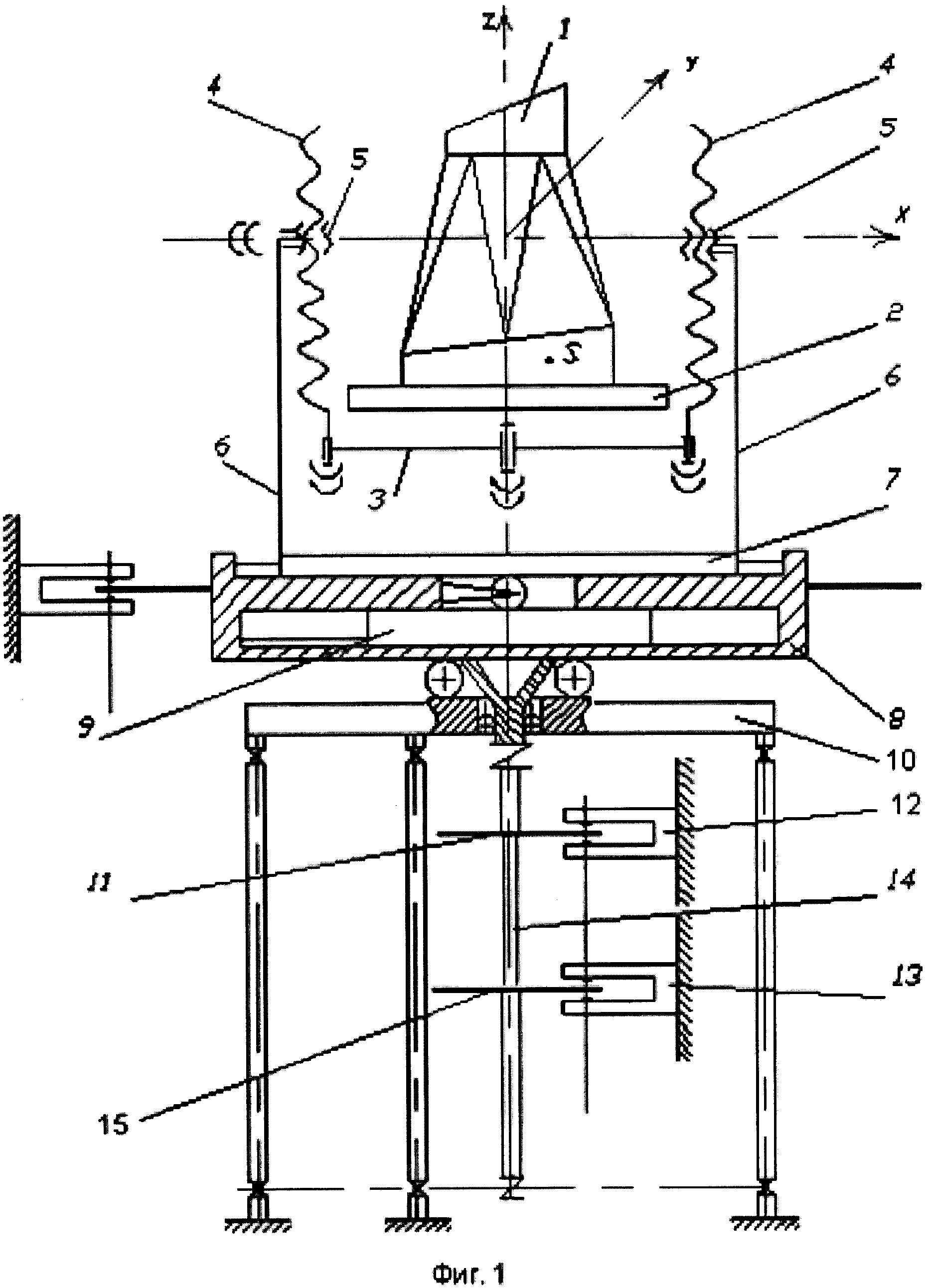
Способ нанесения покрытия на стальную подложку газодинамическим напылением
Способ определения модуля упругости материала покрытия на изделии
Способ измерения износа металлических материалов и покрытий
Способ акустико-эмиссионного мониторинга степени деградации структуры материала и прогнозирования остаточной прочности изделия
Центробежный дебалансный вибровозбудитель с регулируемым статическим моментом массы дебаланса
Адаптивный мобильный пространственный робот-манипулятор для обслуживания лэп и способ обслуживания лэп посредством адаптивного мобильного пространственного робота-манипулятора
Способ формирования высокоточного размера толщины электроэрозионной проволоки
Уплотнение высокотемпературного соединения
Магнитоэластичный управляемый демпфер
Способ определения твердости покрытия на изделии
Способ определения физико-механических характеристик модифицированного поверхностного слоя материала изделия и устройство для его осуществления
Манипулятор для субмикронных перемещений

