Результат интеллектуальной деятельности: СИСТЕМА УПРАВЛЕНИЯ И СПОСОБ ДЛЯ УМЕНЬШЕНИЯ ЭФФЕКТОВ ЛЮФТА ВО ВРЕМЯ РУЛЕНИЯ
Вид РИД
Изобретение
Область техники
Настоящее изобретение относится к системе управления и способу для улучшения восприятия водителем руления согласно ограничительным частям независимых пунктов формулы изобретения.
Уровень техники
При рулении транспортным средством обычным является то, что водитель поворачивает рулевое колесо, прикладывая к нему усилие так, что рулевое колесо поворачивается на желаемый угол, который соответствует направлению, в котором он желает, чтобы двигалось транспортное средство. В транспортном средстве с системой с непосредственным соединением между рулевым колесом и ходовыми колесами или альтернативно с системой, посредством которой руление осуществляется через силовой сервопривод, усилие, требуемое для поворота рулевого колеса, соответствует заданному угловому трению при рулении, заданной настройке углов поворота ходовых колес и трению и состоянию дороги. Таким же образом непрямолинейность проезжей части и недостатки в рулевом управлении, например люфт, будут вызывать колебание в усилии, которое должно быть приложено к рулевому колесу.
Различные исследования показали, что соотношение между входным сигналом водителя для угла поворота рулевого колеса и реакцией транспортного средства, например поперечным ускорением или скоростью поворота вокруг вертикальной оси, является критическим для восприятия руления. Грузовой автомобиль должен легко управляться на протяжении длинных расстояний, без ощущения нервозности в рулении. "Нервозность в рулении" означает, что соотношение между заданным углом поворота рулевого колеса и получающимся в результате поворотом управляемого колеса слишком линейное. Некоторая задержка или сопротивление является желательным, иначе транспортное средство будет реагировать на малейшее движение рулевого колеса. В то же время водитель должен ощущать отчетливую реакцию от транспортного средства на его действие руления. Когда существует люфт в линии рулевого управления, например, вследствие износа механических компонентов, упругости в системе управления или нелинейном поведении шин, может случаться, что водитель должен поворачивать рулевое колесо на некоторый угол, прежде чем транспортное средство отреагирует.
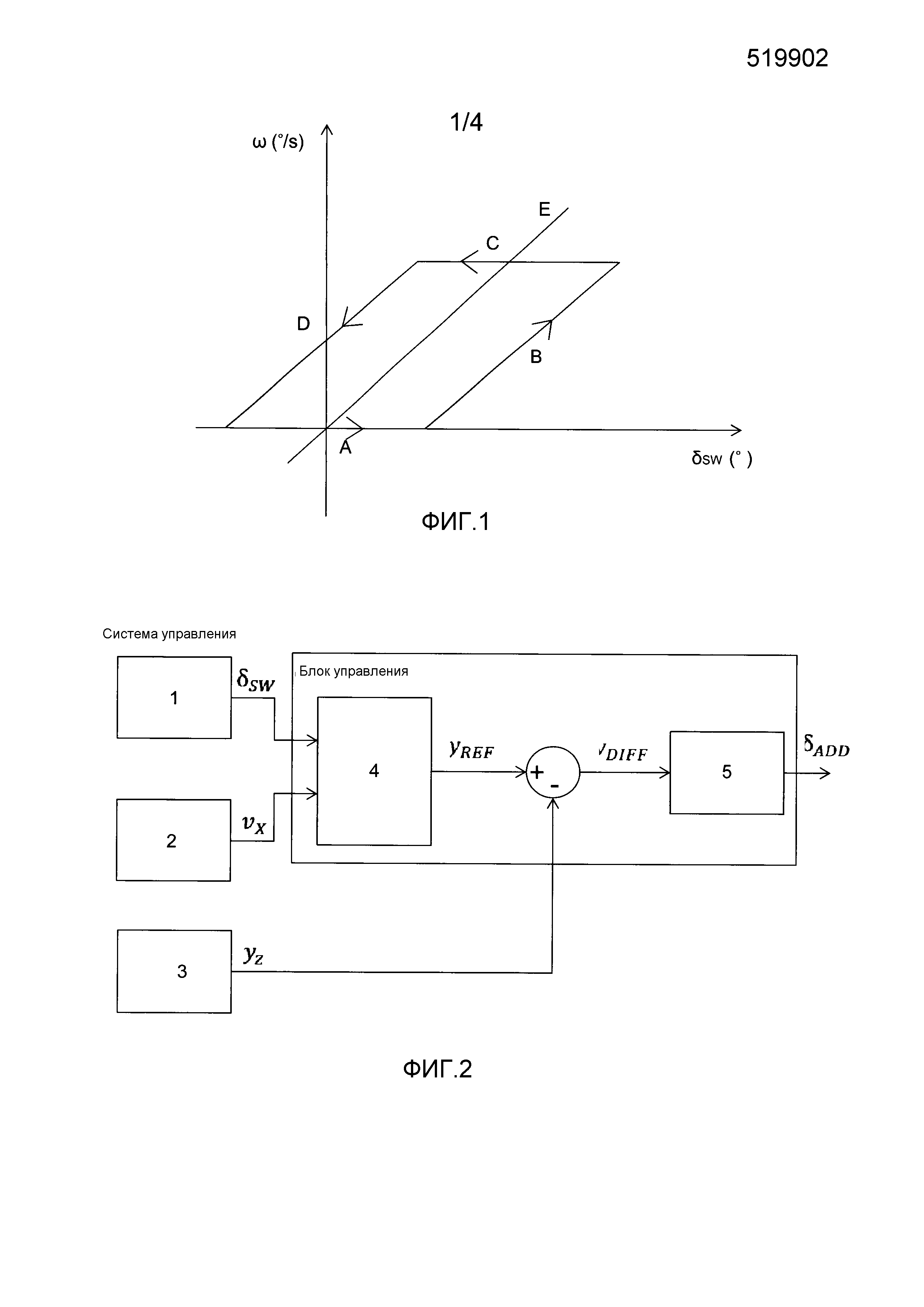
На графике на фиг. 1 иллюстрируется проблема соотношения между углом δsw поворота рулевого колеса и скоростью ω поворота вокруг вертикальной оси транспортного средства, когда существует люфт в линии рулевого управления. Когда водитель поворачивает рулевое колесо из первоначального положения 0 на угол поворота рулевого колеса, должен быть достигнут некоторый угол поворота рулевого колеса, прежде чем транспортное средство отреагирует, поворачивая ходовые колеса, как проиллюстрировано на графике посредством скорости поворота вокруг вертикальной оси транспортного средства, первоначально не увеличивающейся, когда угол поворота рулевого колеса увеличивается (A). Через некоторое время люфт прекращается, и транспортное средство начинает изменять направление поступательно, когда угол поворота рулевого колеса увеличивается (B). Когда водителю нужно развернуть транспортное средство в противоположном направлении, та же проблема возникает, но вдвойне. Первоначально возникает люфт, описанный по ссылке (A), за которым следует другой люфт во время разворота в противоположном направлении (C). Через некоторое время люфт прекращается, и транспортное средство начинает изменять направление поступательно, когда угол поворота рулевого колеса увеличивается (D).
Оптимальный характер реакции на заданный угол поворота рулевого колеса представляется прямой линией E на графике.
В US 2006/0006020 описана система управления для транспортного средства с усиленным рулевым управлением. Система управления конфигурируется так, чтобы управлять механизмом рулевого управления таким образом, что так называемый коэффициент угла поворота при рулении увеличивается в центральном диапазоне руления, где угол поворота при рулении является небольшим, и уменьшается в диапазоне рулевого управления, где угол поворота при рулении близок к своему максимуму. Таким образом, предотвращаются потери на усиление, вызванные задержкой отслеживания от механизма рулевого управления. Когда угол поворота при рулении увеличивается, прикладываемая угловая скорость, следовательно, уменьшается поступательно, давая водителю хорошее ощущение руления.
В WO 2011/035960 описан способ, при котором определяется угол поворота рулевого колеса и применяется дополнение угла поворота при рулении, которое зависит от характерного для транспортного средства параметра.
В US 20100280716 описан способ для активного руления, при котором соотношение между углом поворота рулевого колеса и углом поворота при рулении может изменяться посредством совмещения углов. Смещение между требуемым углом мотора и текущим углом мотора может быть уменьшено посредством алгоритма, который делает переход мягким.
В US 20100332081 описана активная система рулевого управления с совмещением угла, посредством чего соотношение между углом поворота рулевого колеса и углом поворота при рулении изменяется как функция скорости транспортного средства относительно временной задержки.
В US 20090026003 описана активная система рулевого управления, в которой дополнения угла поворота при рулении выполняются в зависимости от скорости транспортного средства и угловой скорости поворота рулевого колеса.
Системы, описанные выше, ссылаются на различные способы помощи водителю в рулении транспортным средством.
Задачей настоящего изобретения является создание улучшенной системы и улучшенного способа, чтобы вызывать у водителя хорошее ощущение руления при рулении транспортным средством.
Сущность изобретения
Вышеописанная задача решается посредством создания системы управления для уменьшения эффектов люфта во время руления транспортным средством, причем система содержит датчик угла поворота рулевого колеса, приспособленный для того, чтобы определять угол δsw(t) поворота рулевого колеса транспортного средства и формировать на его основе сигнал угла поворота рулевого колеса, датчик скорости, приспособленный для того, чтобы определять скорость vx(t) транспортного средства и формировать на ее основе сигнал скорости, и датчик, приспособленный для того, чтобы определять фактическое изменение направления yz(t) транспортного средства и формировать на его основе сигнал поворота. Система управления дополнительно содержит блок управления, приспособленный для того, чтобы принимать упомянутые сигналы, чтобы использовать упомянутый угол δsw(t) поворота рулевого колеса, скорость vx(t) транспортного средства и фактическое изменение направления yz(t) в качестве основы для вычисления дополнения δADD(t) угла поворота при рулении для уменьшения расхождения между ожидаемым изменением направления управляемых ходовых колес транспортного средства и их фактическим изменением направления при упомянутом угле δsw(t) поворота рулевого колеса, и формировать на его основе сигнал дополнения угла поворота при рулении, вследствие чего система управления приспособлена для того, чтобы добавлять дополнение δADD(t) угла поворота при рулении к вручную управляемому механизму рулевого управления транспортного средства.
В другом аспекте задача решается посредством способа для уменьшения эффектов люфта во время руления транспортным средством, причем способ включает определение угла δsw(t) поворота рулевого колеса, определение скорости vx(t) транспортного средства, определение фактического изменения направления yz(t) транспортного средства, использование упомянутого угла δsw(t) поворота рулевого колеса, скорости vx(t) транспортного средства и фактического изменения направления в качестве основы для вычисления дополнения δADD(t) угла поворота при рулении для уменьшения расхождения между ожидаемым изменением направления управляемых ходовых колес транспортного средства и их фактическим изменением направления при упомянутом угле δsw(t) поворота рулевого колеса, и добавление дополнения δADD(t) угла поворота при рулении к вручную управляемому механизму рулевого управления транспортного средства.
Изобретение достигает усиления реакции транспортного средства на перемещение рулевого колеса, тем самым практически устраняя эффекты люфта, которые могут присутствовать в линии рулевого управления транспортного средства вследствие механического люфта, дорожных колес и т.д. Задержка в реакции транспортного средства на заданный водителем угол поворота рулевого колеса, таким образом, уменьшается.
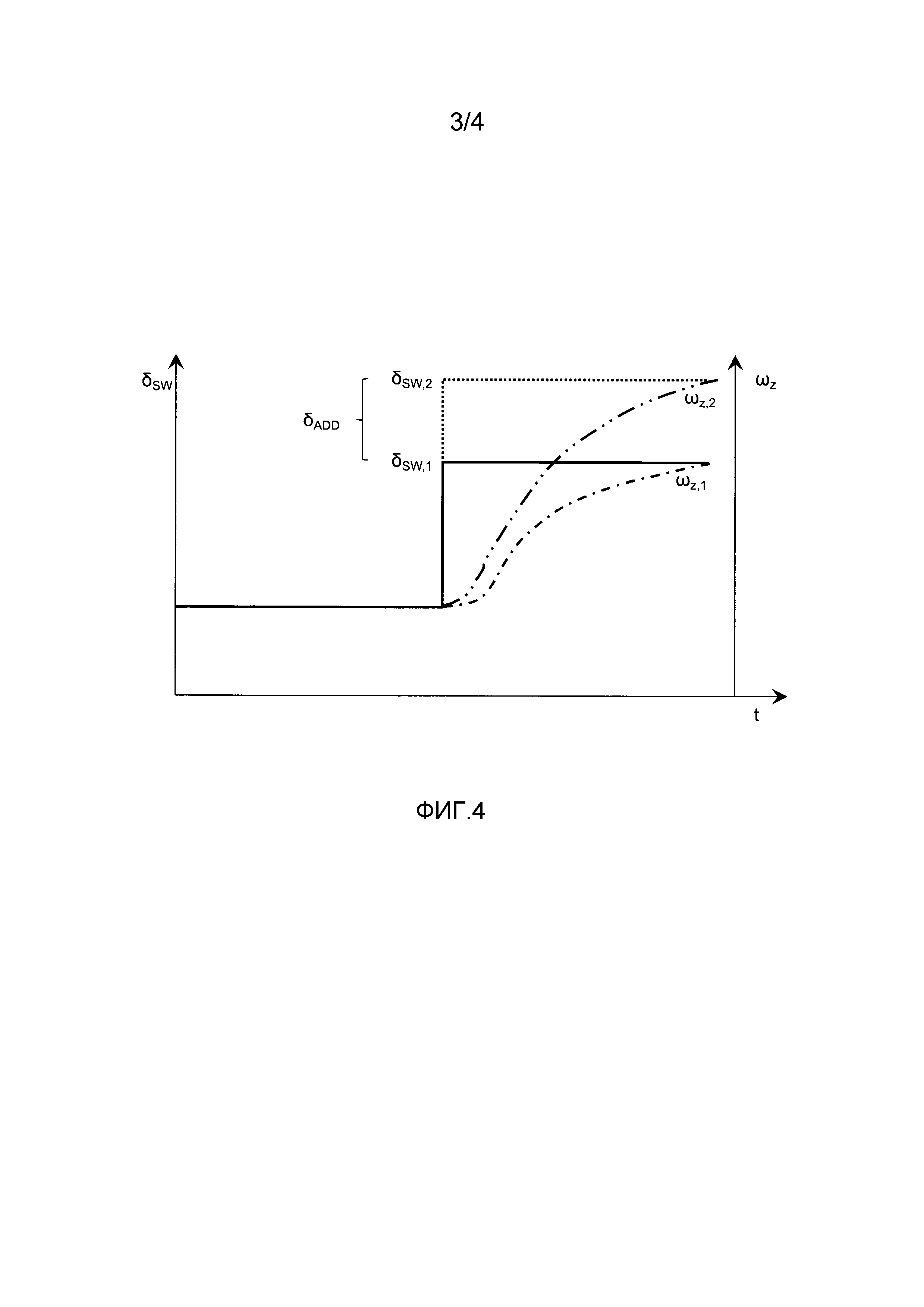
Некоторый гистерезис в линии рулевого управления обычно желателен, иначе руление может показывать нервный характер изменения. Результаты изобретения иллюстрируются в примере на графике на фиг. 4, который объясняется в подробном описании, изложенном ниже.
Предпочтительные варианты осуществления описываются в зависимых пунктах формулы и подробном описании.
Краткое описание прилагаемых чертежей
Изобретение описывается ниже со ссылкой на прилагаемые чертежи, на которых:
Фиг. 1 - график, иллюстрирующий расхождение в форме гистерезиса, которое возникает во время руления вследствие люфта в линии рулевого управления;
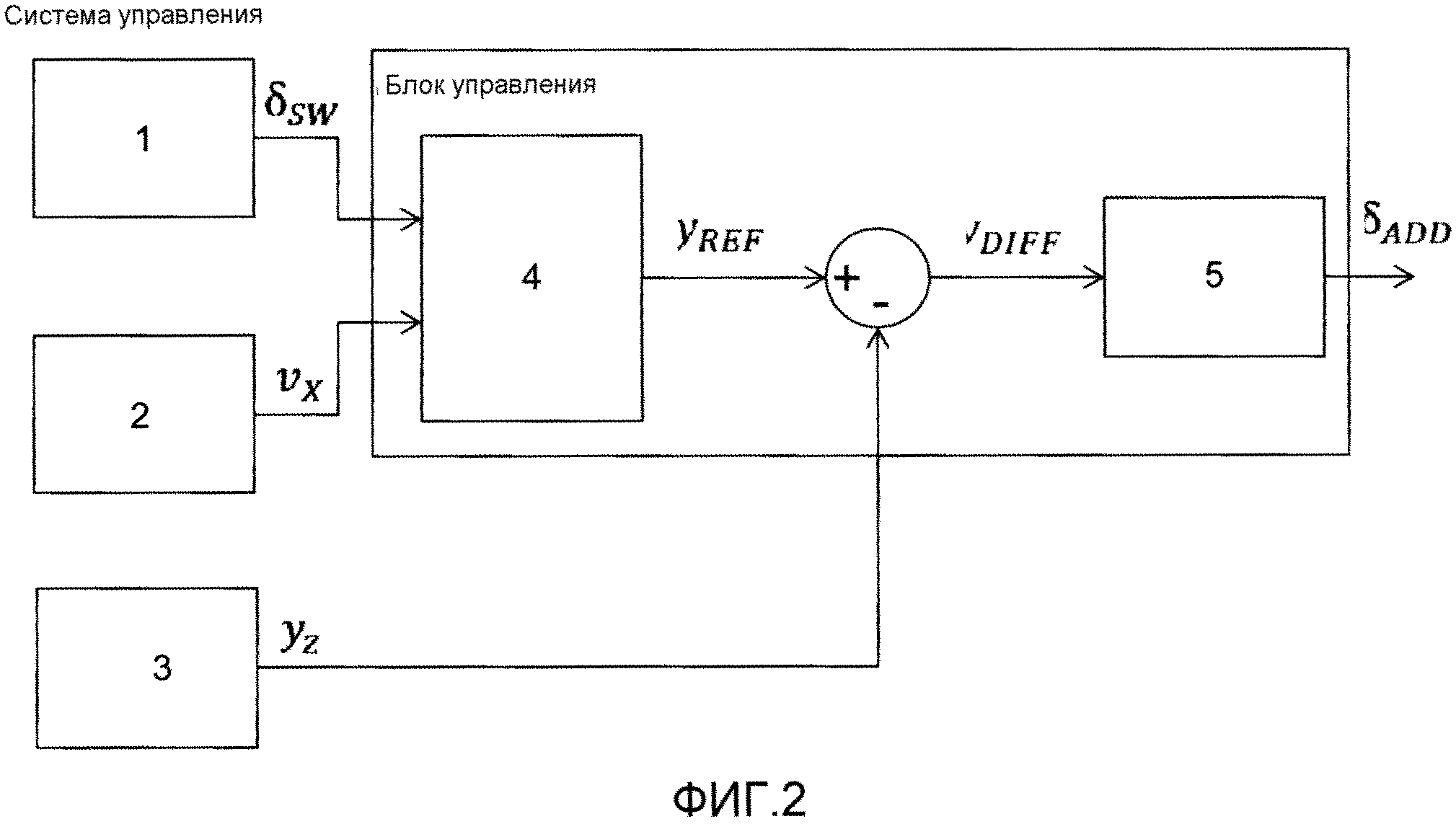
фиг. 2 - система управления согласно варианту осуществления изобретения;
фиг. 3 - иллюстрация того, как система согласно изобретению присоединяется к транспортному средству через электромотор (EM);
фиг. 4 - график, иллюстрирующий результаты изобретения; и
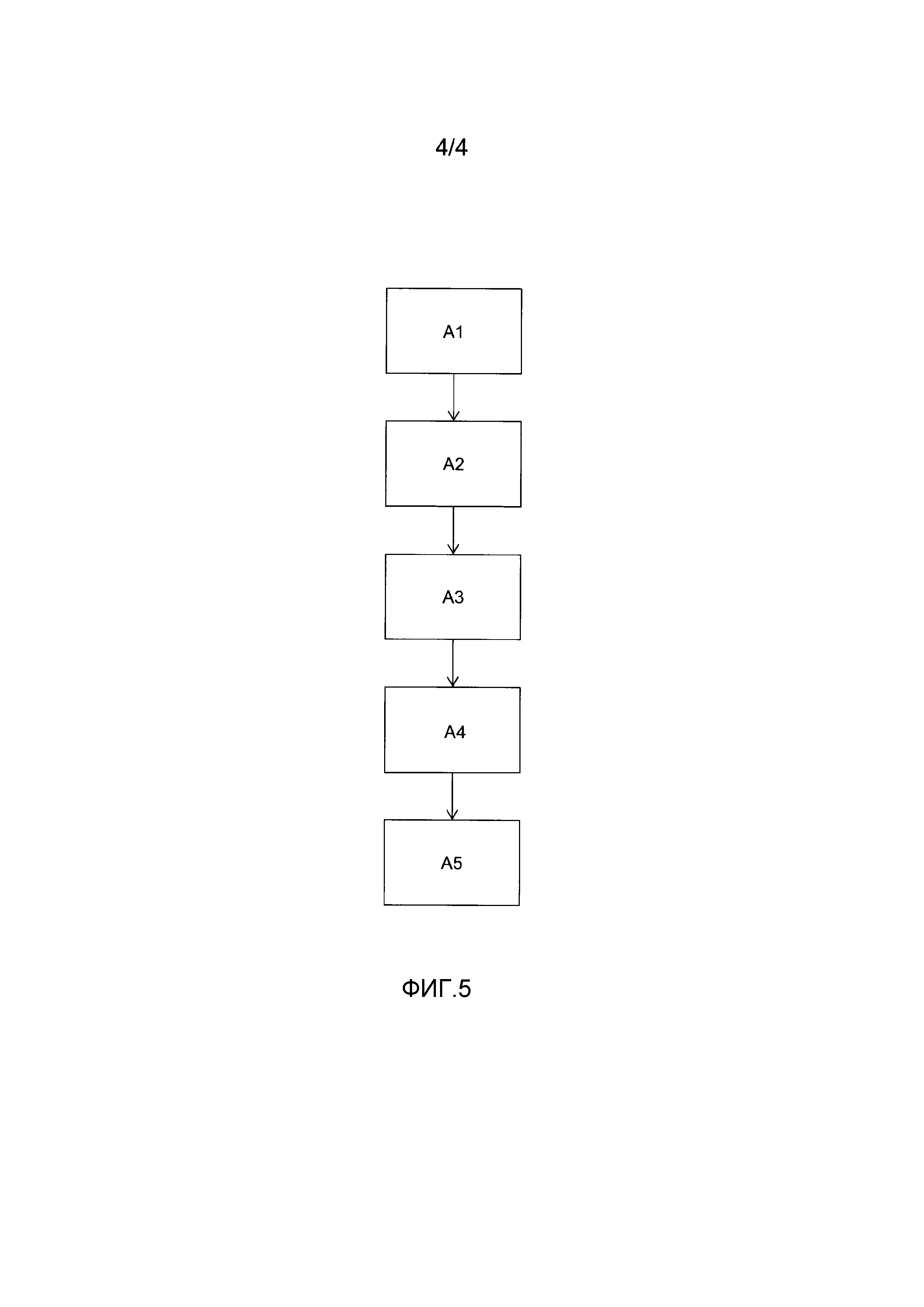
фиг. 5 - блок-схема последовательности операций для способа согласно варианту осуществления изобретения.
Подробное описание предпочтительных вариантов осуществления изобретения
Фиг. 2 изображает систему управления согласно варианту осуществления изобретения, который будет сейчас объяснен со ссылкой на нее. Система управления содержит датчик 1 угла поворота рулевого колеса, приспособленный для того, чтобы определять угол δsw(t) поворота рулевого колеса и формировать на его основе сигнал угла поворота рулевого колеса. Датчик угла поворота рулевого колеса может, например, быть датчиком в рулевой колонке транспортного средства, чтобы измерять поворот рулевого колеса. Система содержит также датчик 2 скорости, приспособленный для того, чтобы определять скорость vx(t) транспортного средства и формировать на ее основе сигнал скорости. Различные отличающиеся способы измерения скорости транспортного средства, как правило, подразумевают определение скорости некоторого подвижного компонента транспортного средства, который вращается со скоростью, связанной со скоростью транспортного средства. Датчик скорости может, например, быть приспособлен, чтобы измерять скорость вращения ходовых колес транспортного средства и, таким образом, определять скорость транспортного средства. Система управления дополнительно содержит датчик 3, приспособленный для того, чтобы определять фактическое изменение направления транспортного средства и формировать на его основе сигнал поворота. Фактическое изменение направления транспортного средства - это то, что происходит, когда водитель рулит транспортным средством. Датчик 3 может, например, быть датчиком скорости поворота вокруг вертикальной оси, приспособленным, чтобы определять скорость ωz(t) поворота вокруг вертикальной оси транспортного средства и формировать на ее основе сигнал скорости поворота вокруг вертикальной оси. Скорость поворота вокруг вертикальной оси описывает, как быстро транспортное средство поворачивается вокруг своего собственного центра тяжести, что имеет место, когда транспортное средство изменяет свое направление движения. В другом варианте осуществления датчик 3 может быть приспособлен, чтобы определять поперечное ускорение ay(t) транспортного средства для того, чтобы определять фактическое изменение направления транспортного средства. Поперечное ускорение описывает усилия, требуемые для удерживания транспортного средства на проезжей части, и может, например, быть определено с помощью датчика ускорения, приспособленного, чтобы определять поперечное ускорение.
Сигналы угла поворота рулевого колеса, сигналы скорости и сигнал поворота, которые описывают фактическое изменение направления транспортного средства, затем отправляются блоку управления в системе управления. Блок управления приспособлен для того, чтобы принимать упомянутые сигналы и вычислять дополнение δADD(t) угла поворота при рулении для уменьшения расхождения между ожидаемым изменением направления управляемых ходовых колес транспортного средства и их фактическим изменением направления при упомянутом угле δsw(t) поворота рулевого колеса. Вычисления основываются на упомянутом угле δsw(t) поворота рулевого колеса, скорости vx(t) транспортного средства и фактическом изменении направления yz(t). Блок управления дополнительно приспособлен, чтобы формировать на их основе сигнал дополнения угла поворота при рулении, вследствие чего система управления приспособлена для того, чтобы добавлять дополнение δADD(t) угла поворота при рулении к управляемому вручную механизму 6 рулевого управления транспортного средства, как проиллюстрировано на фиг. 3.
Ожидаемое изменение направления - это то, что транспортное средство будет оптимально выполнять при соответствующем угле поворота рулевого колеса, если не было люфта в линии рулевого управления, шинах и т.д.
Таким образом, люфт в линии рулевого управления может быть компенсирован без необходимости для водителя точно знать, как конкретное транспортное средство ведет себя, и адаптироваться соответствующим образом. Руление, таким образом, становится более безопасным и более предсказуемым. С помощью изобретения фактическое изменение направления транспортного средства, следовательно, будет лучше соответствовать входному сигналу угла поворота водителем рулевого колеса. Время реакции транспортного средства, таким образом, уменьшается.
В одном варианте осуществления блок управления приспособлен для того, чтобы вычислять разницу yDIFF(t) между ожидаемым изменением направления yREF(t) транспортного средства и его фактическим изменением направления yz(t) и формировать на ее основе разностный сигнал. Таким образом, расхождение между ожидаемым изменением направления транспортного средства и фактическим изменением направления может быть получено. Это расхождение может затем быть компенсировано посредством системы управления, адаптируемой для того, чтобы определять дополнение δADD(t) угла поворота при рулении на основе упомянутой разницы yDIFF(t). Ожидаемое изменение направления yREF(t) транспортного средства предпочтительно определяется посредством модели 4 ожидаемого изменения направления транспортного средства при упомянутом угле δsw(t) поворота рулевого колеса и скорости vx(t) транспортного средства. Использование модели того, как транспортное средство будет реагировать на углы поворота рулевого колеса, если не было люфта в линии рулевого управления, делает возможным обнаружение того, как насколько большим является расхождение, и делает возможным его компенсирование.
Как объяснено ранее, фактическое изменение направления транспортного средства может, например, быть описано посредством его скорости ωz(t) поворота вокруг вертикальной оси и его поперечного ускорения ay(t).
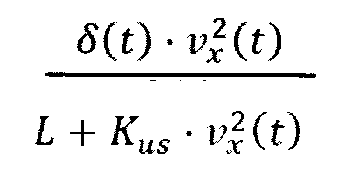
Когда желательно регулировать транспортное средство на основе его скорости поворота вокруг вертикальной оси, его фактическое изменение направления yz(t) тогда определяется по его скорости ωz(t) поворота вокруг вертикальной оси. Фактическое изменение направления yREF(t) транспортного средства определяется в этом варианте осуществления посредством модели 4 его ожидаемой скорости ωREF(t) поворота вокруг вертикальной оси из

где vx(t) - скорость транспортного средства, угол  поворота управляемых колес, где i - это передаточное число транспортного средства, L - колесная база транспортного средства (межосевое расстояние) и Kus - градиент недостаточной поворачиваемости. Расхождение, которое возникает между ожидаемой скоростью поворота вокруг вертикальной оси и фактической скоростью поворота вокруг вертикальной оси, может быть таким образом компенсировано.
поворота управляемых колес, где i - это передаточное число транспортного средства, L - колесная база транспортного средства (межосевое расстояние) и Kus - градиент недостаточной поворачиваемости. Расхождение, которое возникает между ожидаемой скоростью поворота вокруг вертикальной оси и фактической скоростью поворота вокруг вертикальной оси, может быть таким образом компенсировано.
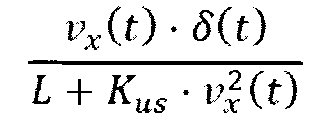
Когда желательно регулировать транспортное средство на основе его поперечного ускорения, его фактическое изменение направления yz(t) тогда определяется по его поперечному ускорению ay(t). Ожидаемое изменение направления yREF(t) транспортного средства определяется в этом варианте осуществления посредством модели 4 ожидаемого поперечного ускорения ay(t) транспортного средства из
Расхождение, которое возникает между ожидаемым поперечным ускорением и фактическим поперечным ускорением, может быть таким образом компенсировано.
Система управления затем содержит в одном варианте осуществления регулятор 5, приспособленный для того, чтобы принимать упомянутый разностный сигнал и преобразовывать упомянутую разницу yDIFF(t) в дополнение δADD(t) угла поворота при рулении. Это делает возможным определение величины угла δADD поворота рулевого колеса, которое должно быть добавлено к текущему углу δsw(t) поворота рулевого колеса, и выполнение регулирования скорости поворота вокруг вертикальной оси и поперечного ускорения соответствующим образом. Регулятор может, например, быть P, PI или PID-регулятором. Использование регулятора делает возможным совершение "мягкого" дополнения дополнительного угла δADD поворота. Характеристика регулятора может с преимуществом быть адаптирована, например, к водителю или ситуации управления. В городском транспортном движении более быстрая реакция может, например, быть желательной, поскольку интенсивность движения обычно быстрее, чем на национальных автомагистралях.
Фиг. 3 показывает, как вычисленное дополнение δADD угла поворота при рулении добавляется к углу δsw поворота при рулении, приложенному водителем посредством поворота рулевого колеса. Дополнение δADD угла поворота при рулении может, например, быть сформировано с помощью электромотора (EM). Два угла поворота при рулении передаются в качестве входных сигналов вручную управляемому механизму рулевого управления транспортного средства, который может содержать волновую передачу 6, планетарную коробку 6 передач, которая затем вынуждает сервопривод 7 передавать желаемые углы δCONTROL ходовым колесам. Вручную управляемый механизм рулевого управления транспортного средства может в одном варианте осуществления содержать архитектуру "рулевого управления по проводам", в соответствии с которой транспортное средство управляется посредством электронной системы управления.
Фиг. 4 иллюстрирует результаты изобретения, здесь на графике, на котором текущий угол δsw(t) поворота рулевого колеса и скорость ωz(t) поворота вокруг вертикальной оси совмещаются. δsw,1(t) обозначает угол поворота рулевого колеса водителем и получающуюся в результате скорость ωz,1(t) поворота вокруг вертикальной оси транспортного средства без компенсации. Транспортное средство, следовательно, начинает поворачивать только после некоторого периода времени, т. е. с некоторой задержкой. Когда дополнение δADD угла поворота при рулении добавляется к текущему углу δsw,1(t) поворота рулевого колеса, получающийся в результате угол δsw,2(t) поворота рулевого колеса становится больше. Тогда возникает более быстрое поворачивание транспортного средства с результирующей увеличенной скоростью ωz,2(t) поворота вокруг вертикальной оси. Изобретение, таким образом, вызывает моментальное увеличение в угле поворота при рулении, который передается в качестве входного сигнала вручную управляемому механизму рулевого управления транспортного средства, как проиллюстрировано на фиг. 3. Результирующая скорость ωz(t) поворота вокруг вертикальной оси затем определяется и передается по обратной связи в системе управления, как проиллюстрировано на фиг. 2. Здесь иллюстрируются результаты изобретения, когда используемым регулирующим параметром является скорость ωz(t) поворота вокруг вертикальной оси, но те же или, по меньшей мере, аналогичные результаты достигаются посредством выбора регулировки транспортного средства относительно поперечного ускорения ay(t).
В другом аспекте изобретение содержит способ для уменьшения эффектов люфта во время руления транспортным средством. В блок-схеме на фиг. 5 иллюстрируется способ, который первоначально содержит этап A1, определяющий угол δsw(t) поворота рулевого колеса транспортного средства, этап A2, определяющий скорость vx(t) транспортного средства, и этап A3, определяющий фактическое изменение направления yz(t) транспортного средства. Эти первые три этапа A1-A3 могут выполняться в другом порядке. Когда они выполнены, этап A4 затем использует упомянутый угол δsw(t) поворота рулевого колеса, скорость vx(t) и фактическое изменение направления как основу для вычисления дополнения δADD(t) угла поворота при рулении для уменьшения расхождения между ожидаемым изменением направления управляемых ходовых колес транспортного средства и их фактическим изменением направления при упомянутом угле δsw(t) поворота рулевого колеса. Этап A5 затем добавляет дополнение δADD(t) угла поворота при рулении к вручную управляемому механизму рулевого управления транспортного средства.
Как ранее описано в отношении системы управления, существуют различные альтернативы для определения величин, указанных выше, причем эти альтернативы, таким образом, упоминаются для проведения способа.
В одном варианте осуществления способ содержит определение упомянутого дополнения δADD(t) угла поворота при рулении на основе разницы yDIFF(t), которая вычисляется как разница между ожидаемым изменением направления yREF(t) транспортного средства и его фактическим изменением направления yz(t). Ожидаемое изменение направления yREF(t) транспортного средства тогда предпочтительно определяется посредством модели 4 его ожидаемого изменения направления yREF(t) при упомянутом угле δsw(t) поворота рулевого колеса и скорости vx(t) транспортного средства.
В случаях когда транспортное средство регулируется относительно его скорости ωz(t) поворота вокруг вертикальной оси, способ содержит определение фактического изменения направления yz(t) транспортного средства, посредством определения его скорости ωz(t) поворота вокруг вертикальной оси, и использование модели 4 его ожидаемой скорости ωREF(t) поворота вокруг вертикальной оси, чтобы определять его ожидаемое изменение направления.
В случаях когда транспортное средство регулируется относительно его поперечного ускорения ay(t), способ содержит определение фактического изменения направления yz(t) транспортного средства, посредством определения его поперечного ускорения ay(t), и использование модели 4 его ожидаемого поперечного ускорения ay(t), чтобы определять его ожидаемое изменение направления.
Способ может также содержать этап преобразования упомянутой разницы yDIFF(t) в дополнение δADD(t) угла поворота при рулении.
Изобретение содержит также компьютерный программный продукт, содержащий компьютерные программные инструкции, чтобы предоставлять возможность компьютерной системе выполнять этапы согласно вышеописанному способу, когда программные инструкции запускаются на упомянутой компьютерной системе. В одном варианте осуществления упомянутый компьютерный программный продукт имеет программные инструкции, сохраненные на носителе, который является считываемым компьютерной системой.
Настоящее изобретение не ограничивается вариантами осуществления, описанными выше. Могут быть использованы различные альтернативы, модификации и эквиваленты. Вышеупомянутые варианты осуществления, следовательно, не ограничивают рамки объема изобретения, который определяется прилагаемой формулой изобретения.
Способ и система для диагностики рабочей функции кузова, относящейся к транспортным средствам
Оценка веса транспортного средства
Система трансмиссии для автотранспортного средства
Приводное устройство для транспортного средства, транспортное средство, содержащее такое приводное устройство, и способ управления таким приводным устройством
Управление функциями в моторном транспортном средстве
Взаимодействие с водителем, имеющее отношение к системе круиз-контроля с регулированием расчетной скорости
Способ одновременного управления крутящим моментом двигателя внутреннего сгорания и электрической машины в гибридном транспортном средстве
Способ и система для оценки поведения водителя во время управления транспортными средствами
Способ и модуль для определения, по меньшей мере, одного опорного значения
Способ переключения передач гибридного транспортного средства
Система предупреждения
Взаимодействие с водителем, относящееся к экономичному автоматическому поддержанию скорости
Система предупреждения
Способ и система для диагностики рабочей функции кузова, относящейся к транспортным средствам
Оценка веса транспортного средства
Система трансмиссии для автотранспортного средства
Приводное устройство для транспортного средства, транспортное средство, содержащее такое приводное устройство, и способ управления таким приводным устройством
Управление функциями в моторном транспортном средстве
Взаимодействие с водителем, имеющее отношение к системе круиз-контроля с регулированием расчетной скорости
Способ одновременного управления крутящим моментом двигателя внутреннего сгорания и электрической машины в гибридном транспортном средстве

