Результат интеллектуальной деятельности: СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ
Вид РИД
Изобретение
Изобретение относится к системам обмена данными и может быть использована для реализации информационного обмена между подвижными объектами (ПО) и источниками (получателями) информации через наземные комплексы (НК).
Известен аналог предлагаемой системы, которым является система радиосвязи с подвижными объектами [1]. В этой системе во время движения подвижные объекты, находящиеся в пределах радиогоризонта, обмениваются данными с наземным комплексом. Принимаемые наземным комплексом из канала «воздух-земля» сообщения через аппаратуру передачи данных поступают в вычислитель автоматизированного рабочего места (АРМ) на базе ПЭВМ, где в соответствии с принятым в системе протоколом обмена, производится идентификация принятого в сообщении адреса с адресами подвижных объектов, хранящимися в его памяти, по аналогии с системой ACARS [2]. При совпадении адреса подвижного объекта с хранящимся в списке адресом информация о местоположении, параметрах движения ПО и состоянии его датчиков выводится на экран монитора наземного АРМ. В вычислителе АРМ на базе ПЭВМ решается задача обеспечения постоянной радиосвязи со всеми N ПО. При выходе за пределы радиогоризонта хотя бы одного из ПО или приближении к границе зоны устойчивой радиосвязи, необходимость ретрансляции сигналов определяется программно. Выбирается один из ПО, который назначается ретранслятором сообщений, или назначается канал ДКМВ диапазона. По результатам анализа местоположения и параметров движения остальных ПО определяются оптимальные пути доставки сообщений удаленному от НК за радиогоризонт выбранному воздушному объекту. Сообщение от НК через последовательную цепочку, состоящую из (N-1) ПО или канала ДКМВ диапазона, может быть доставлено N-му ПО. Для этого на НК в формирователе типа ретранслируемых сообщений в заранее определенные разряды (заголовок) передаваемой кодограммы закладываются номер ПО, назначенного ретранслятором в канале MB диапазона, и адреса воздушных объектов, обеспечивающих заданный трафик сообщения. Принятые на ПО сообщения анализируются в блоке анализа типа сообщений для решения вопроса о направлении данных по двунаправленной шине на систему управления объекта или ретрансляции их на соседний ПО.
В обычном режиме, когда не требуется ретрансляция сигналов с НК, осуществляется адресный опрос ПО путем формирования сообщения для передачи в канал радиосвязи в соответствии с протоколом обмена. Набираемое оператором (диспетчером) сообщение отображается на мониторе АРМ. На ПО после прохождения через антенну, радиостанцию, аппаратуру передачи данных сигнал поступает в бортовой вычислитель, где происходит идентификация принятого в сообщении адреса с собственным адресом подвижного объекта. Далее сообщение передается в блок анализа типа ретранслируемого сообщения, где происходит дешифрация полученного заголовка (служебной части) сообщения, и определяется в каком режиме должна работать аппаратура ПО. Информационная часть сообщения записывается в память бортового вычислителя и при необходимости выводится на экран блока регистрации данных. Формирователи типа ретранслируемых сообщений позволяют обеспечить обмен цифровыми данными по каналу «оператор-пилот» взамен существующей речевой информации. Они предназначены для выбора элементов сообщений разрешения/информации/запроса, которые соответствуют принятой речевой фразеологии, и набора произвольного текста. Отображение набираемых и принятых сообщений осуществляется на блоке регистрации данных ПО и мониторе АРМ НК соответственно. Сообщения с выходов приемников сигналов глобальных навигационных спутниковых систем ГЛОНАСС/GPS записываются в память наземного и бортового вычислителей с привязкой к глобальному времени и используются для расчета навигационных характеристик и параметров движения каждого ПО. Принятые на НК навигационные сообщения от всех ПО обрабатываются в наземном вычислителе и выводятся на экран монитора АРМ.
Однако аналогу присущи следующие недостатки:
- отсутствует анализ состояния ионосферы и параметров каналов связи в ДКМВ диапазоне на данный момент времени в заданных направлениях и соответствующая коррекция планов связи с ПО. Поэтому существующее планирование связи малоэффективно, поскольку вместо постоянно меняющихся исходных данных о состоянии ионосферы используются среднестатистические данные, которые могут отличаться для конкретного дня и времени года. Поэтому связь в ДКМВ диапазоне будет неустойчивой;
- формирование плана связи, как правило, осуществляется на основе специализированных пакетов прикладных программ, включающих модели солнечного цикла, и ионосферного распространения радиоволн, с учетом параметров приемо-передающей аппаратуры и антенн. Тем не менее, несмотря на совершенство самих программ, вероятность точного прогноза на текущий момент времени в направлении на управляющие наземные комплексы мала.
Наиболее близким по назначению и большинству существенных признаков является система радиосвязи с подвижными объектами [3], которая и принята за прототип. Эта система состоит из М наземных комплексов, соединенных радиоканалами связи с N подвижными объектами а между собой - двухсторонними связями с помощью наземной сети передачи данных с входом/выходом системы. Каждый наземный комплекс содержит наземную антенну, радиостанцию, подключенную двухсторонними связями через аппаратуру передачи данных к первому входу/выходу вычислителя автоматизированного рабочего места. Первый вход вычислителя АРМ подключен к приемнику сигналов глобальных навигационных спутниковых систем, второй вход - к пульту управления АРМ, а выход - к монитору АРМ. Формирователь типа ретранслируемых сообщений соединен с соответствующим входом вычислителя АРМ. Первый и второй входы/выходы наземной радиостанции ДКМВ диапазона подключены двухсторонними связями к соответствующим входам/выходам наземного вычислителя АРМ и наземной аппаратуры передачи данных соответственно, а третий вход/выход - к наземной антенне ДКМВ диапазона. В состав каждого из подвижных объектов входят бортовые датчики, приемник сигналов глобальных навигационных спутниковых систем, анализатор типа принимаемых сообщений и бортовой формирователь типа ретранслируемых сообщений, каждый из которых соединен с соответствующими входами бортового вычислителя. Вход/выход бортового вычислителя подключен к двунаправленной шине системы управления подвижным объектом. Выход бортового вычислителя соединен с входом блока регистрации данных и через последовательно соединенные бортовую аппаратуру передачи данных, бортовую радиостанцию MB диапазона подключен к бортовой антенне MB диапазона. Первый и второй входы/выходы бортовой радиостанции ДКМВ диапазона подключены двухсторонними связями к соответствующим входам/выходам бортового вычислителя и бортовой аппаратуры передачи данных соответственно, а третий вход/выход - к бортовой антенне ДКМВ диапазона. Передача данных с НК обеспечивается по цепочке последовательно соединенных первого ПО, второго ПО и далее до N-го ПО, а передача данных с М-го ПО на НК осуществляется в обратном порядке. Передающие станции ДКМВ диапазона в количестве B штук подключены двухсторонними связями к наземной сети передачи данных, а по радиоканалам - к M наземным комплексам. В состав каждого наземного комплекса системы входят модуль сопряжения, подключенный двухсторонними связями к соответствующим входам/выходам наземного вычислителя и наземной сети передачи данных, К направленных приемных антенн ДКМВ диапазона, соединенных двухсторонними связями через соответствующие K приемников ДКМВ диапазона с соответствующими K входами/выходами вычислителя автоматизированного рабочего места. Каждая из B передающих станций ДКМВ диапазона содержит антенну ДКМВ диапазона, подключенную через последовательно соединенные передатчик ДКМВ диапазона и формирователь сигналов к соответствующему входу/выходу вычислителя АРМ. Первый вход вычислителя АРМ подключен к приемнику сигналов глобальных навигационных спутниковых систем, второй вход - к пульту управления АРМ, а выход - к монитору АРМ. Модуль сопряжения подключен двухсторонними связями к соответствующим входам/выходам вычислителя АРМ и наземной сети передачи данных.
Однако прототипу присущи следующие недостатки:
- из-за наличия на борту только одного приемника ДКМВ диапазона невозможно организовать прием разнесенных по частоте радиосигналов, а, следовательно, и повысить достоверность передачи информации;
- на борту можно работать или в режиме приема данных с НК или в технологическом режиме приема данных с других передающих средств ДКМВ диапазона. Совмещение этих режимов не обеспечивается;
- не осуществляется анализ нахождения ПО в зоне прямой видимости от одного из обслуживаемых его наземных комплексов.
Таким образом, основной технической задачей, на решение которой направлена заявляемая полезная модель, является повышение достоверности передачи данных на подвижные объекты и с них на наземные комплексы за счет анализа заранее известных параметров радиосигналов ДКМВ диапазона (частоты, времени излучения и состава сообщения), формируемых с заданного местоположения станциями ионосферного мониторинга, передатчиками станций режима HFDL и другими передающими устройствами в ДКМВ диапазоне, принимаемых на ПО с разных направлений.
Указанный технический результат достигается тем, что в систему радиосвязи с подвижными объектами, состоящую из передающих станций ДКМВ диапазона в количестве B штук, а также из M наземных комплексов (НК), соединенных радиоканалами связи с N подвижными объектами (ПО), между собой передающие станции ДКМВ диапазона и НК соединены двухсторонними связями с помощью наземной сети передачи данных с входом/выходом системы, причем наземный комплекс содержит наземные антенны MB и ДКМВ диапазонов, подключенные двухсторонними связями через последовательно соединенные соответствующие наземные радиостанции MB и ДКМВ диапазонов, наземную аппаратуру передачи данных к первому входу/выходу вычислителя автоматизированного рабочего места (АРМ), первый вход которого подключен к приемнику сигналов глобальных навигационных спутниковых систем, второй вход - к пульту управления АРМ, а выход - к монитору АРМ, наземный формирователь типа ретранслируемых сообщений, соединенный с третьим входом вычислителя АРМ, первый и второй входы/выходы наземной радиостанции ДКМВ диапазона подключены двухсторонними связями к соответствующим входам/выходам вычислителя АРМ и наземной аппаратуры передачи данных соответственно, а третий вход/выход - к наземной антенне ДКМВ диапазона, модуль сопряжения, подключенный двухсторонними связями к соответствующим входам/выходам вычислителя АРМ и наземной сети передачи данных с входом/выходом системы, K направленных приемных антенн ДКМВ диапазона с соответствующими K приемниками ДКМВ диапазона, соединенными двухсторонними связями с соответствующими K входами/выходами вычислителя автоматизированного рабочего места, B передающие станции ДКМВ диапазона по радиоканалам подключены к M наземным комплексам, в состав каждого из подвижных объектов входят бортовые датчики, приемник сигналов глобальных навигационных спутниковых систем, анализатор типа принимаемых сообщений и бортовой формирователь типа ретранслируемых сообщений, каждый из которых соединен с соответствующими входами бортового вычислителя, вход/выход которого подключен к двунаправленной шине системы управления подвижным объектом, бортовой вычислитель соединен с входом блока регистрации данных и через последовательно соединенные бортовую аппаратуру передачи данных, бортовую радиостанцию MB диапазона подключен к бортовой антенне MB диапазона, первый и второй входы/выходы бортовой радиостанции ДКМВ диапазона подключены двухсторонними связями к соответствующим входам/выходам бортового вычислителя и бортовой аппаратуры передачи данных соответственно, а третий вход/выход - к бортовой антенне ДКМВ диапазона, причем передача данных с НК обеспечивается по цепочке последовательно соединенных первого ПО, второго ПО и далее до N-го ПО, а передача данных с N-го ПО на НК осуществляется в обратном порядке, каждая из В передающих станций ДКМВ диапазона содержит передающую антенну ДКМВ диапазона, подключенную через последовательно соединенные передатчик ДКМВ диапазона и формирователь сигналов к соответствующему входу/выходу вычислителя АРМ передающей станции ДКМВ диапазона, первый вход которого подключен к приемнику сигналов глобальных навигационных спутниковых систем, второй вход - к пульту управления АРМ передающей станции ДКМВ диапазона, а выход - к монитору АРМ передающей станции ДКМВ диапазона, модуль сопряжения, подключенный двухсторонними связями к соответствующим входам/выходам вычислителя АРМ передающей станции ДКМВ диапазона и наземной сети передачи данных с входом/выходом системы, в состав каждого ПО системы дополнительно введены приемная антенна ДКМВ диапазона, подключенная через m параллельно соединенных приемников ДКМВ диапазона двухсторонними связями к соответствующим m входам/выходам бортовой аппаратуры передачи данных, и блок хранения данных с входом для загрузки данных, подключенный двухсторонними связями к соответствующему входу/выходу бортового вычислителя, высокочастотные выходы передающих станций ДКМВ диапазона соединены с соответствующими входами подвижных объектов, на каждом ПО имеется вход для приема радиосигналов известных передатчиков ДКМВ диапазона.
На фиг.1 представлена структурная схема системы радиосвязи с подвижными объектами, где обозначено:
1 - наземный комплекс;
2 - подвижный объект;
3 - наземная сеть передачи данных с входом/выходом 4 системы;
37 - вход для приема на ПО радиосигналов известных передатчиков ДКМВ диапазона.
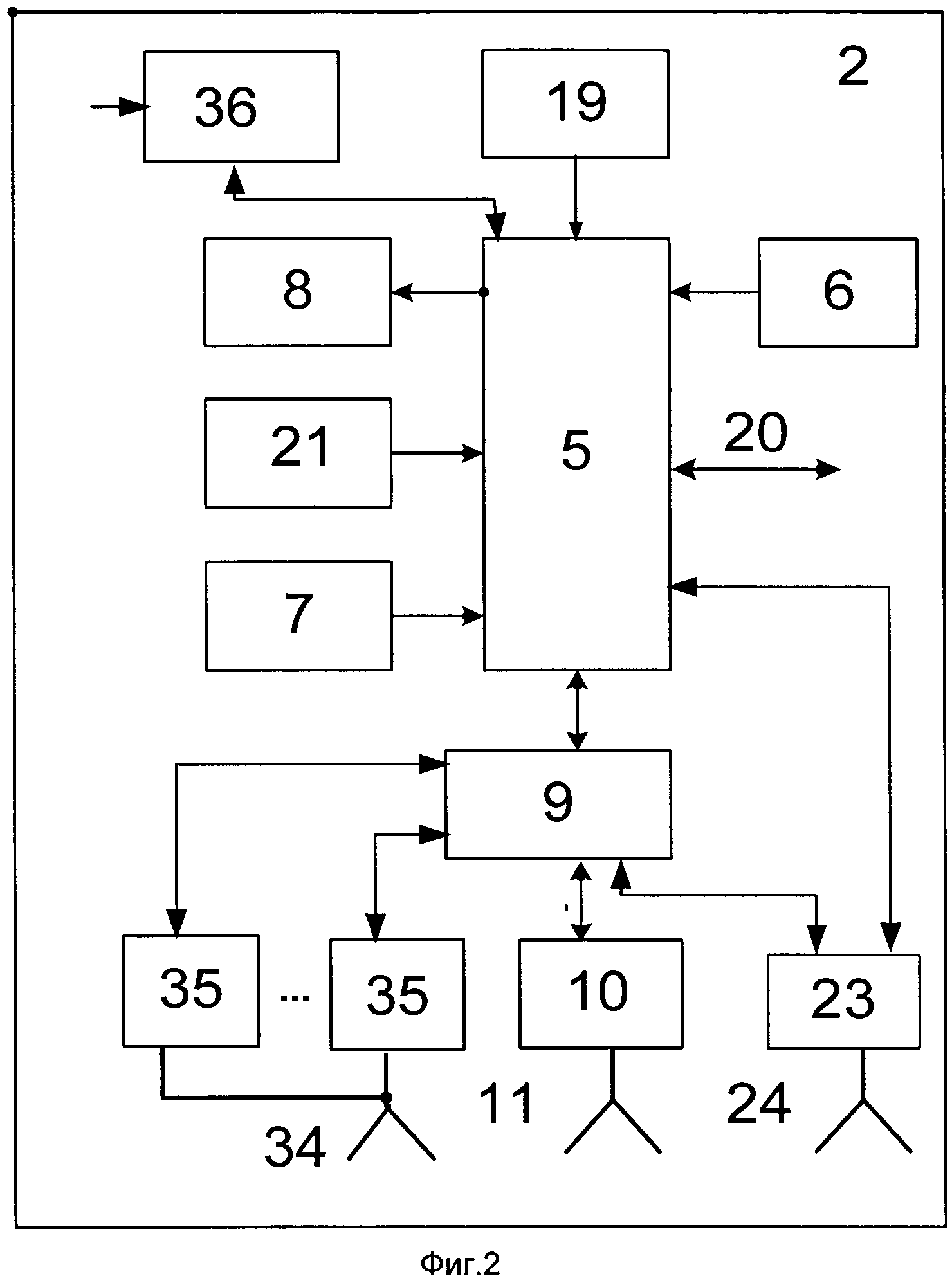
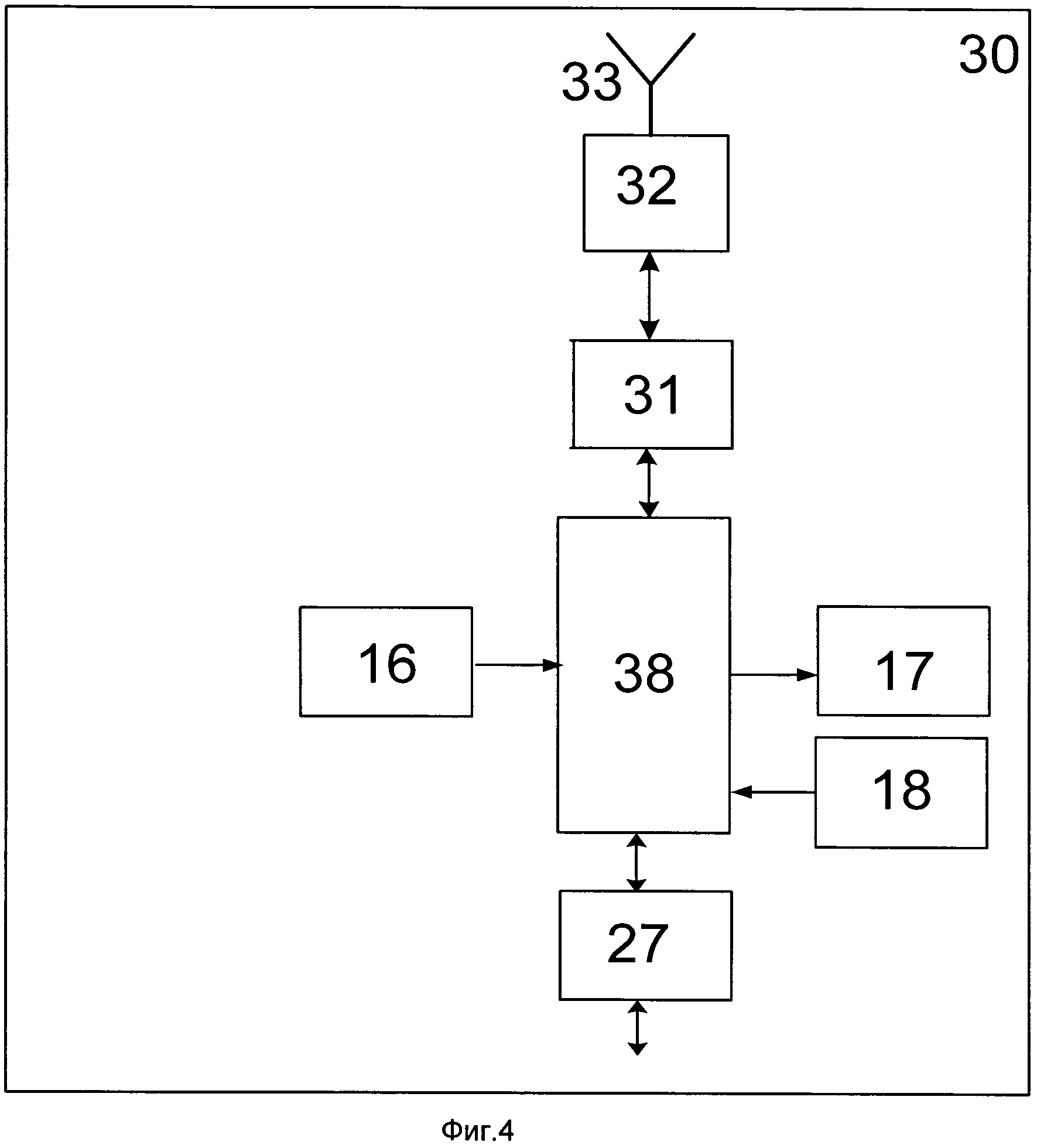
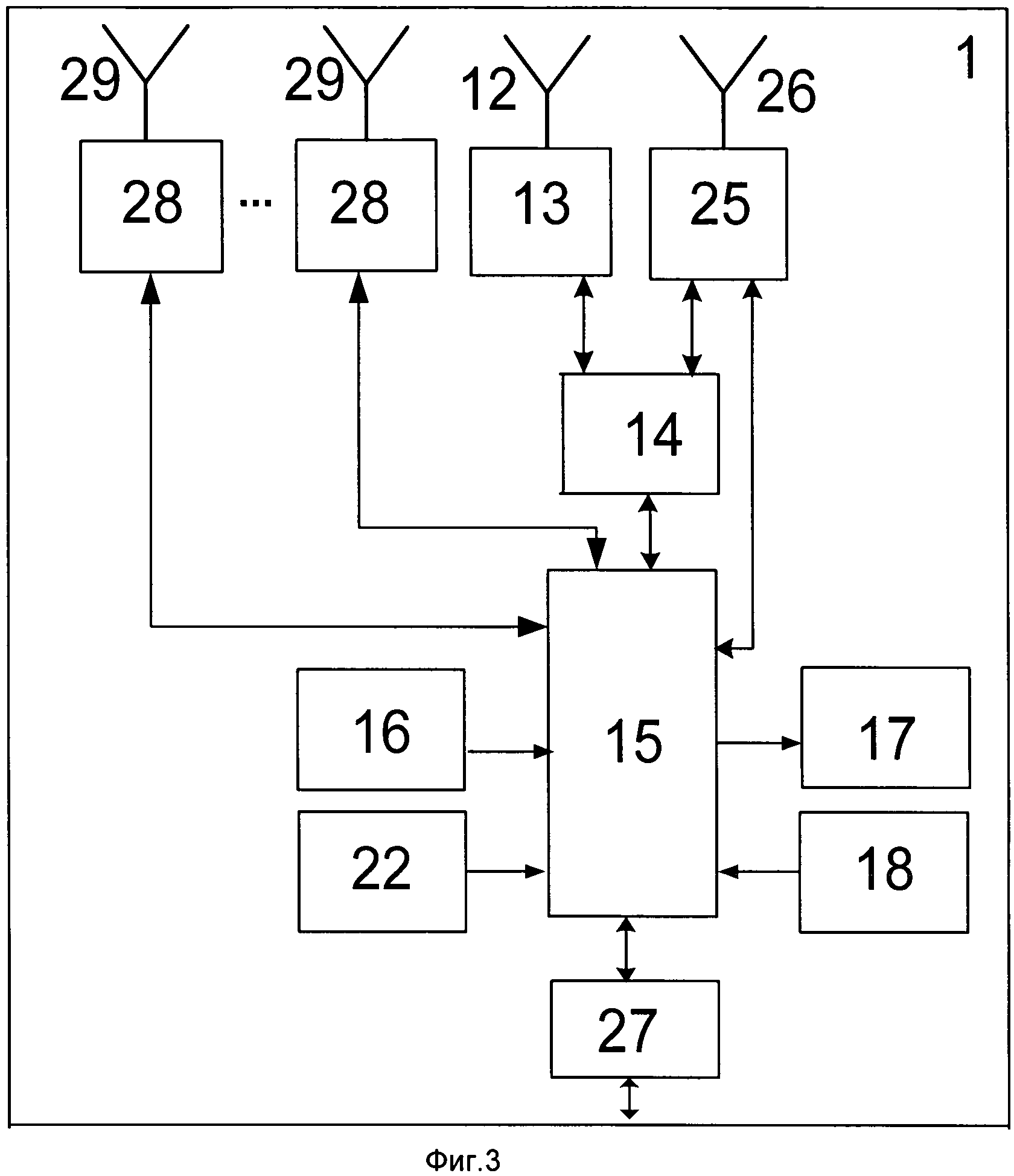
На фиг.2, 3 и 4 представлены структурные схемы подвижного объекта 2, наземного комплекса 1 и передающей станции 30 ДКМВ диапазона, входящих в состав системы радиосвязи с подвижными объектами, где обозначено:
5 - бортовой вычислитель;
6 - бортовые датчики;
7 - приемник сигналов глобальных навигационных спутниковых систем, например ГЛОНАСС/GPS;
8 - бортовой блок регистрации данных;
9 - бортовая аппаратура передачи данных (АПД);
10 - бортовая радиостанция MB диапазона;
11 - бортовая антенна MB диапазона;
12 - наземная антенна MB диапазона;
13 - наземная радиостанция MB диапазона;
14 - наземная аппаратура передачи данных;
15 - вычислитель АРМ;
16 - наземный приемник сигналов глобальных навигационных спутниковых систем;
17 - монитор АРМ;
18 - пульт управления АРМ;
19 - анализатор типа принимаемых сообщений;
20 - двунаправленная шина системы управления подвижным объектом;
21 - бортовой формирователь типа ретранслируемых сообщений;
22 - наземный формирователь типа ретранслируемых сообщений;
23 - бортовая радиостанция ДКМВ диапазона;
24 - бортовая антенна ДКМВ диапазона;
25 - наземная радиостанция ДКМВ диапазона;
26 - наземная антенна ДКМВ диапазона;
27 - модуль сопряжения;
28 - K приемников ДКМВ диапазона НК;
29 - K направленных приемных антенн ДКМВ диапазона НК;
30 - передающая станция ДКМВ диапазона;
31 - формирователь сигналов станции ДКМВ диапазона;
32 - передатчик ДКМВ диапазона;
33 - передающая антенна ДКМВ диапазона;
34 - приемная антенна ДКМВ диапазона ПО;
35 - приемник ДКМВ диапазона ПО;
36 - блок хранения данных с входом для загрузки данных ПО;
37 - вход для приема на ПО радиосигналов известных передатчиков ДКМВ диапазона;
38 - вычислитель АРМ передающей станции ДКМВ диапазона.
Алгоритм работы системы радиосвязи с ПО заключается в проведении непрерывного анализа на всех подвижных объектах 2 радиосигналов наземных передающих станций ДКМВ диапазона с известными параметрами, которые находятся в направлениях на обслуживаемые их наземные комплексы, совместной обработки их, выработке решения и выдачи (при необходимости) на НК 1 в следующих сообщениях значения вероятностно-оптимальной частоты рабочего канала с лучшими на данный момент времени параметрами. Анализ может быть проведен, например, по наиболее мощному из принятых на ПО 2 в данный момент времени радиосигналов ДКМВ диапазона. На ПО 2 в процессе полета постоянно анализируется его местоположение и, если он находится в зоне устойчивой связи (в ней обеспечивается передача данных с заданной достоверностью) с НК 1 в MB диапазоне, то оборудование подвижного объекта переключается на работу по более высокоскоростному и надежному радиоканалу связи.
Система радиосвязи с подвижными объектами работает следующим образом. Во время движения подвижные объекты, находящиеся в пределах радиогоризонта, обмениваются навигационными данными и данными оценки параметров каналов ДКМВ диапазона по радиосигналам (маркерам), принятым от разных НК 1, или в случае прямой видимости с наземным комплексом 1 - по радиолинии связи MB диапазона. Принимаемые наземной радиостанцией 13 из канала «воздух-земля» сообщения через аппаратуру 14 передачи данных поступают в вычислитель 15 АРМ, который может быть выполнен на базе серийной ПЭВМ. В нем в соответствии с принятым в системе протоколом обмена проводится идентификация принятого в сообщении адреса с адресами подвижных объектов, хранящимися в памяти вычислителя 15 АРМ. При совпадении адреса подвижного объекта с хранящимся в списке адресом информация о местоположении, параметрах движения ПО 2 и состоянии его датчиков запоминается в вычислителе 15 АРМ. В вычислителе 15 АРМ по данным, полученным со всех ПО 2 в зоне связи, определяются вероятностно оптимальные на данный момент времени частоты, которые назначаются радиостанциям 10 и 13, 25 и 23. Поэтому в наземном вычислителе 15 АРМ решаются задачи обеспечения постоянной устойчивой радиосвязи со всеми N ПО 2. На основе информации о местонахождении всех ПО 2 и параметрах их движения, вероятностно оптимальных частотах осуществляются операции запоминания этих сообщений в вычислителе 15 АРМ НК 1, оперативной коррекции плана связи и вывод необходимых данных на экран монитора 17 АРМ НК 1 в виде, удобном для восприятия оператора (диспетчера). Кроме того, в вычислителе 15 АРМ наземного комплекса 1 и в блоке 36 подвижного объекта запоминаются характеристики передающих станций 30 ДКМВ диапазона и других известных передатчиков ДКМВ диапазона: их координаты, мощность излучения, тип антенны ДКМВ диапазона (ненаправленная или направленная по азимуту с заданным коэффициентом усиления), излучаемые частоты или группа частот.
При выходе за пределы радиогоризонта хотя бы одного из ПО 2 или приближения к границе зоны устойчивой радиосвязи MB диапазона определяется программно один из ПО 2, который назначается ретранслятором сообщений. При постоянном изменении дальности между ПО 2 и НК 1 в качестве ретранслятора может быть назначен в течение определенного времени любой из N ПО 2, местоположение которого известно и оптимально по отношению к НК 1 и всем остальным ПО 2. По анализу местоположения и параметров движения остальных ПО 2 определяются оптимальные пути доставки сообщений удаленному от НК 1 за радиогоризонт подвижному объекту 2 м. Сообщение от НК 1 через последовательную цепочку, состоящую из (N-1)-го ПО 2, может быть доставлено N-му ПО 2. Для этого на НК 1 в формирователе 22 типа ретранслируемых сообщений в заранее определенные разряды передаваемой кодограммы закладываются номер ПО 2, назначенного ретранслятором, и адреса подвижных объектов 2, обеспечивающих заданный трафик сообщения. Принятые на ПО 2 сообщения обрабатываются в блоке 19 анализа типа сообщений. Если сообщение предназначено для данного ПО 2, то после анализа решается вопрос о направлении данных по двунаправленной шине 20 на систему управления ПО 2, не указанную на фигуре 2, или в режиме ретрансляции - о передаче их на соседний ПО 2N. Для исключения коллизий минимизируется число разрядов в передаваемом сообщении и осуществляется ретрансляция данных последовательно во времени. Загрузка в память блока 36 хранения данных с входом для загрузки необходимых данных, в том числе электронной карты местности по маршруту полета, местоположение и параметры станций 30 и других известных передатчиков ДКМВ диапазона, плана связи, рекомендуемых рабочих частот осуществляется в виде системной таблицы при предстартовой подготовке подвижного объекта 2 через вход блока 36, например, с помощью флеш-памяти, или через вход/выход 4 аппаратуры наземной сети 3 передачи данных и последовательного соединения блоков 27, 15, 14, 13, 12, 11, 10, 9, и 5 на вход блока 36. План связи при плохих параметрах радиоканала может быть скорректирован по результатам анализа в НК 1 и ПО 2 радиосигналов передающей станции 30 ДКМВ диапазона и других известных передатчиков ДКМВ диапазона, находящихся в направлении НК-ПО 2, с которым должен быть проведен сеанс связи и выбрана для обмена рабочая частота канала с лучшими на данный момент времени параметрами.
При передаче с НК 1 приоритетных сообщений для ПО 2 в соответствии с принятыми в системе радиосвязи с подвижными объектами категориями срочности в формирователе 22 типа ретранслируемых сообщений в заголовке сообщения формируется код запрета передачи других сообщений на время, отводимое для трансляции данных с НК 1 на выбранное ПО 2N с учетом времени реакции ПО 2 на принятое сообщение и времени задержки в трактах обработки дискретных сигналов. Принимаемая на ПО 2N информация отображается на экране бортового блока 8 регистрации данных в виде буквенно-цифровых символов, в виде точек и векторов или в другом виде. Остальные менее приоритетные сообщения в соответствии с протоколом обмена находятся в очереди соответствующей категории срочности. В вычислителях 5 и 15 определяется время «старения» информации, и, если сообщение в течение определенного промежутка времени не было передано в канал связи, то оно «стирается», и посылается запрос на повторную передачу сообщения.
В обычном режиме с НК 1, когда не требуется ретрансляция сигналов, осуществляется адресный опрос ПО 2 путем формирования сообщения для передачи в канал радиосвязи в соответствии с протоколом обмена. Набираемое оператором (диспетчером) с пульта 18 управления АРМ сообщение отображается на мониторе 17 АРМ и параллельно после прохождения сигнала на НК 1 через вычислитель 15, аппаратуру 14 передачи данных, оборудование MB диапазона: радиостанцию 13, антенну 12 и на ПО 2 - бортовую антенну 11, радиостанцию 10 и далее через аппаратуру передачи данных 9 поступает в бортовой вычислитель 5, где происходит идентификация принятого в сообщении адреса с адресом ПО 2. Далее сообщение передается в блок 19 анализа типа ретранслируемого сообщения для дешифрации полученного заголовка (служебной части) сообщения. Информационная часть сообщения записывается в память бортового вычислителя 5 и при необходимости выводится на экран блока 8 регистрации данных, который может быть выполнен в виде монитора или другого устройства отображения.
В режиме адресного опроса инициатором связи может быть только НК 1. Если подвижные объекты 2 сформировали для передачи сообщения и обнаружили, что радиоканал свободен (нет радиосигналов в каналах обмена данными), то они информируют остальные подвижные объекты о начале цикла передачи данных, в том числе о своем местоположении, и случайным образом в выделенных им временных слотах распределяют передаваемые сообщения. Сообщения о местоположении ПО 2 и параметрах его движения, например, с выходов приемников 7 и 16 сигналов глобальных навигационных спутниковых систем, например, ГЛОНАСС/GPS или с выходов инерциальных систем (для ПО) записываются в память вычислителей 5 ПО, 15 НК 1 и 38 B передающих станций 30 ДКМВ диапазона с привязкой к глобальному времени. В вычислителях 5 и 15 эти данные используются для расчета навигационных характеристик, параметров движения каждого ПО и оценки качества параметров радиоканала связи ДКМВ диапазона по принимаемым в известные интервалы времени радиосигналам. В зависимости от выбранного интервала времени выдачи на НК 1 сообщений о местоположении ПО 2 в вычислителе 5 в заданное время формируется соответствующее сообщение с привязкой к глобальному времени проведения измерения координат ПО 2. Эти интервалы времени используется в вычислителе 15 НК 1 для известной операции построения экстраполяционных отметок от ПО 2 [4, 5], а в бортовом вычислителе 5 совместно с блоком 36 хранения данных с входом для загрузки данных, приемниками 35 ДКМВ диапазона, подключенными к одной всенаправленной приемной антенне 34 ДКМВ диапазона (вход 37) - для выполнения процедур, обеспечивающих повышение достоверности передачи информации [6-8]:
- управления через бортовую АПД 9 режимами одного или нескольких из m приемников ДКМВ диапазона в части установки в заданный интервал времени (с привязкой к глобальному единому времени) частоты анализируемых радиосигналов НК 1, передающих станций 30 ДКМВ диапазона и других известных передатчиков ДКМВ диапазона и дальнейшего переключения в соответствии с излучением в эфир известных радиосигналов;
- отбраковка радиосигналов передатчиков ДКМВ диапазона, находящихся вне направления с подвижного объекта на обслуживаемые его НК;
- анализ и выбор вероятностно оптимальной на данный момент времени частоты или подбор ближайшей к ней назначенной частоты;
- выработка решения о переходе на обмен данными в MB диапазоне при нахождении ПО от обслуживаемого его НК в зоне прямой (оптической) видимости по результатам анализа данных с блоков 36 и 7;
- анализ параметров радиосигналов, транслируемых со стационарных передающих станций ДКМВ диапазона и других известных источников радиосигналов ДКМВ диапазона для определения наиболее оптимального на данный момент времени рабочего канала связи;
- адаптация системы радиосвязи к изменению условий распространения радиоволн по частоте и по пространственному разнесению;
- динамическое управление частотой при приеме более мощного из нескольких радиосигналов;
- адаптация системы радиосвязи по скорости передачи данных, виду модуляции и кодирования с использованием методов решающей обратной связи при приеме сообщений с компенсацией задержки, многолучевости, сосредоточенных по спектру помех, доплеровских сдвигов частоты;
- привязка всех абонентов системы к единому глобальному времени [9].
В аппаратуре передачи данных 9 и 14 осуществляются известные операции: синхронизации, модуляции и демодуляции, кодирования и декодирования, сопряжения с узлами 5, 10, 23 - на ПО 2 и с узлами 15, 13, 26 - на НК 1 и другие [8]. Для исключения наводок на приемники 35 при работе радиостанции 23 на излучение антенны 34 и 24 на ПО должны быть разнесены на максимально возможное расстояние и в течение этого интервала времени в бортовом вычислителе 5 обеспечен запрет на обработку сигналов с выходов приемников 35.
В ситуации, когда одно или несколько ПО 2 вышли за пределы прямой видимости с НК 1 или не удается организовать с этими ПО 2 обмен данными даже через цепочку, состоящую из (N-1)-го ПО 2, осуществляется переход по взаимно увязанным во времени командам с бортового и наземного вычислителей 5 и 15 НК 1 на замену радиолинии связи MB диапазона на радиолинию связи ДКМВ диапазона, состоящую из бортовой радиостанции 23 ДКМВ диапазона, бортовой антенны 24 ДКМВ диапазона, наземной радиостанции 25 ДКМВ диапазона, наземной антенны 26 ДКМВ диапазона. Привязка ко времени этих команд осуществляется с помощью меток глобального времени, поступающих в вычислители 5 и 15 НК 1 с выходов приемников 7 и 16 сигналов глобальных навигационных спутниковых систем.
Благодаря модулю сопряжения 27 с наземной сетью 3 передачи данных в НК 1 и станции 30 для каждого из ПО 2, оборудованному ДКМВ радиостанцией, осуществляется передача известной формы и состава пакетов данных, например, маркеров, с наземных комплексов 1 и станций 30. В этом случае на ПО 2 по принятым маркерам определяется НК 1, параметры радиосигналов которого принимаются наиболее устойчиво, или вероятностно оптимальная частота одного из обслуживаемых подвижные объекты наземных комплексов и через него начинается обмен данными. В блоке 36, бортовом и наземном вычислителях 5 и 15 НК 1 хранятся предварительно заложенные таблицы со списками и параметрами наземных комплексов 1, передающих станций 30 ДКМВ диапазона, других известных источников ДКМВ радиосигналов и наборами назначенных им частот. Каждый НК 1 и станции 30 периодически излучают сигналы управления/синхронизации/связи, используемые на ПО 2 в качестве маркеров, на всех назначенных им известных частотах. Принимаемые на ПО 2 эти радиосигналы используются для оценки параметров канала связи ДКМВ диапазона. Для установления линии связи с НК 1 в бортовом вычислителе 5 ПО 2 автоматически анализируются принимаемые сигналы управления/синхронизации/связи от всех наземных комплексов 1 на всех частотах и выбираются лучшие частоты, например, по отношению сигнал/помеха или величине мощности принимаемого сигнала и наземные комплексы 1 для реализации известного принципа адаптации по частоте и пространству. По измеренному отношению сигнал/помеха, в бортовом вычислителе 5 ПО 2 выбирается скорость передачи данных, а также вид модуляции и кодирования. Оценка отношения сигнал/помеха осуществляется всеми НК 1 и ПО 2 каждый раз при приеме информационного сообщения или сигнала управления/синхронизации/связи. Сведения об оптимальном на данный момент времени канале сообщаются на противоположную сторону в виде рекомендуемых частоты и скорости передачи данных. В АПД 9 и 14 при работе на радиостанцию ДКМВ диапазона могут быть использованы известные алгоритмы, например, высокоскоростных адаптивных модемов, рассчитанных на работу в каналах с многолучевостью. Для повышения достоверности приема информации может быть использован помехоустойчивый код, например, циклический. Программное обеспечение вычислителя 15 АРМ представляет собой многозадачный комплекс, в котором задачи планирования связи и обмена данными решаются следующим образом.
После запуска в НК 1 вычислителя 15 АРМ осуществляется идентификация наземной аппаратуры передачи данных 14 и загрузка в АПД 14 текущего времени и плановых данных по связи. Регистрация данных информационного обмена с АПД 14 (служебные и информационные части сообщений, контрольные запросы состояний составных частей АПД 14, коды текущих событий и их словесные интерпретации) осуществляется в базе данных вычислителя 15 АРМ в НК 1. В этой базе данных сохраняются данные информационного обмена НК 1 с каждым ПО 2.
В режиме управления ПО 2 с НК 1 из базы данных выбираются сформированные плановые данные по связи для загрузки в АПД 14. В вычислителе 15 АРМ НК 1 обеспечивается многосторонний анализ функционирования составляющих его блоков и контроль трактов на соответствие плановым данным по связи и их состояния («исправен», «неисправен»). Программно обеспечивается: информационный обмен с ПО 2 формализованными сообщениями, которые реализуют функции проверки связи, изменения рабочей частоты радиостанций 13 и 10, 25 и 23, загрузка плановых данных через блок 36 в бортовой вычислитель 5.
В вычислителе 15 АРМ НК 1 выполняется операции переформатирования кодограммы из формата канала «воздух-земля» в формат наземной сети передачи данных 3 с запоминанием в базе данных и из формата наземной сети передачи данных 3 в формат канала «воздух-земля» с запоминанием в базе данных, обеспечивается взаимодействие с модулем сопряжения 27 по передаче/приему кодограмм в формате наземной сети передачи данных и формируется управляющий сигнал завершения передачи или приема кодограммы. Аналогичные операции осуществляются в вычислителе 38 АРМ станции 30 при преобразовании из формата наземной сети передачи данных 3 в формат канала «земля-воздух». Радиосигналы с B передающих станций 30 ДКМВ диапазона через K направленных (на известные источники излучение радиосигналов ДКМВ диапазона) приемных антенн 29 ДКМВ диапазона поступают на входы K приемников 28 ДКМВ диапазона. Число K выбирается таким образом, чтобы обеспечить связь с любым ПО 2, находящимся в зоне по азимуту, равной 360 градусов. Число каналов в каждом из K приемников 28 ДКМВ диапазона зависит от числа рабочих частот B передающих станций 30 и других известных источников излучения радиосигналов ДКМВ диапазона. В вычислителе 15 АРМ всех НК 1 осуществляется непрерывный анализ радиосигналов параметров ДКМВ диапазона, совместная обработка их, выработка решения и выдача в следующих сообщениях (при необходимости) на НК и другие подвижные объекты 2 номинала частоты рабочего канала с лучшими на данный момент времени характеристиками, а также контроль их работоспособности. Анализ качества радиоканала связи в приемнике 28 ДКМВ диапазона может быть проведен, например, по наиболее мощному из принятых в данный момент радиосигналов или величине отношения сигнал/шум.
Каждая из B передающих станций 30 ДКМВ диапазона содержит вычислитель 38 АРМ, выполненный как и блок 15 на базе ПЭВМ, но выполняющий несколько других функций. Операции, осуществляемые с узлами 16, 17, 18 и 27 аналогичны приводимым в вычислителе 15 АРМ в НК 1. Блок 31 осуществляет формирование видеосигналов, передаваемых на вход передатчика 32 ДКМВ диапазона. Форма видеосигналов зависит от управляющего сообщения с вычислителя 38 АРМ передающей станции 30 ДКМВ диапазона, например, пачка одиночных импульсов, линейно-частотно-модулированный сигнал и другие. В передатчике 32 ДКМВ диапазона видеосигнал модулируется. Полученный радиосигнал усиливается по мощности и через передающую антенну 33 ДКМВ диапазона излучается в пространство. Управление рабочей частотой передатчика 32 ДКМВ диапазона и контроль его работоспособности осуществляется вычислителем 38 АРМ передающей станции 30 ДКМВ диапазона. Тип антенны: направленная или ненаправленная выбирается в зависимости от задач, выполняемых каждой из B передающих станций 30 ДКМВ диапазона. Синхронизация процесса излучения радиосигналов осуществляется с помощью меток точного времени с блока 16.
Таким образом, каждый из ПО 2 может выходить поочередно на связь на нескольких рабочих частотах, известных всем участникам движения. Списки выделенных частот меняются в зависимости от времени года, с учетом сезонных ионосферных изменений. При движении ПО 2 выходит на связь, выбирая для связи тот НК 1, условия распространения радиоволн для связи с которым в данный момент времени являются оптимальными. Сведения о канале связи и выбранном наземном комплексе 1 фиксируются в одном из НК 1, назначенным ведущим. Составленный таким образом канал связи между ПО 2 и получателем (источником) информации, как правило, будет включать канал связи ДКМВ диапазона, АПД 14, АРМ 15, модуль сопряжения 27 (в составе НК 1) и наземную сеть 3 передачи данных с входом/выходом 4 системы, к которому двусторонними связями подключен получатель (источник) информации. С помощью бортового вычислителя 5 ПО 2 и наземного вычислителя 15 НК 1 постоянно будет выбираться оптимальная рабочая частота на основании построенных моделей ионосферы и распространения радиоволн по данным измерений параметров канала связи и анализа сообщений на ПО 2 и в наземных комплексах 1 радиосигналов передающих станций 30 ДКМВ диапазона и других известных источников радиосигналов ДКМВ диапазона. В наземных комплексах 1 также анализируются параметры радиосигнала, передаваемого с ПО 2. По результатам измерений определяется оптимальная на данный момент времени частота, величина которой передается на все ПО 2, находящиеся в этом районе. Этим обеспечивается повышения достоверности передачи данных с подвижных объектов 2 и на них, находящихся на расстояниях от НК 1 от нескольких сотен до нескольких тысяч километров.
Кроме анализа параметров радиосигналов для повышения достоверности передачи данных используются методы изменения диапазона рабочих частот, увеличения мощности передатчика радиостанций 23 и 26 и снижения уровня шумов их приемников, известные методы разнесения по частоте, пространственного разнесения, временного разнесения, разнесения многолучевости, адаптивного выравнивания, кодирования с прямой коррекцией ошибок, перемежения для борьбы с эффектами многолучевости, замираниями, импульсными шумами. Достоверность передачи данных и надежность связи в ДКМВ диапазоне определяются свойствами ионосферы над районом организации связи, ее корреляционными характеристиками по пространству, частоте и времени. Чем менее коррелированы пути разнесения, тем выше надежность связи. Радиус пространственной корреляции по квазирегулярным параметрам ионосферы (энергетике сигнала, многолучевости) обычно составляет 300-600 км. Поэтому НК 1 и передающие станции 30 ДКМВ диапазона разносятся в пространстве на расстояние, превышающее эту величину. Из всех разнесенных в пространстве НК 1 назначается один ведущий, который, кроме рассмотренных выше операций выполняет функцию управления процессами, происходящими в системе. К функциям управления ведущего НК 1 добавляются операции управления частотами, таблицей состояния и регистрации ПО 2, системной таблицей, конфигурацией, качеством передачи данных, обработкой сигналов тревоги и дистанционной диагностики. С АРМ 15 НК 1 через модуль сопряжения 27, вход/выход 4 наземной сети 3 передачи данных обеспечивается интерфейс с расположенными на земле источниками (получателями) информации системы и программирование бортовых вычислителей 5 ПО 2 через соответствующее оборудование. Синхронизация работы наземной сети 3 передачи данных осуществляется на основе использования всеми абонентами - участниками движения единого глобального всемирного координированного времени (UTC), получаемого от существующих объектов глобальной навигационной спутниковой системы.
Для взаимодействия наземных комплексов 1, передающих станций 30 ДКМВ диапазона, оконечных пользователей и ПО 2 используется наземная сеть 3 передачи данных. Она может быть реализована различными известными способами, например, при межсетевой работе НК 1 через центры коммутации пакетов в соответствии с протоколом Х.25 [2,6]. Соединения между НК 1 и центрами коммутации пакетов Х.25 (маршрутизаторами) могут обеспечиваться через специально выделенные или арендуемые каналы связи. Они позволят транслировать сообщение, адресованное пользователем определенному ПО 2 на тот наземный комплекс 1, на котором данный ПО 2 «зарегистрирован», и где в данный момент времени обеспечиваются оптимальные условия приема. Система радиосвязи с ПО 2 может работать в автоматическом режиме без вмешательства оператора на выбранных частотах из списка частот, назначенного при планировании связи.
Для повышения достоверности передачи данных на подвижные объекты в системе используются метод борьбы с нестационарностью ионосферы над районом организации связи за счет излучения подвижными объектами, передающими станциями 30 ДКМВ диапазона и наземными комплексами радиосигналов синхронно по времени или по команде. Принимаемые по ДКМВ радиолиниям сообщения об оптимальном на данный момент времени канале несколькими наземными комплексами обрабатываются для определения наибольшего отношения сигнал/шум в соответствующем канале связи и выбора канала для обеспечения устойчивости связи. Данные о результатах обработки затем используются для комплексирования измерений и выбора наиболее оптимального на данный момент времени канала связи [6, 9].
На момент подачи заявки разработаны алгоритмы функционирования и фрагменты программного обеспечения заявляемой системы радиосвязи. Узлы 1-33 одинаковые с прототипом. Вводимые узлы 34 и 35 могут быть выполнены на типовом полуволновом вибраторе ДКМВ диапазона и серийных приемниках ДКМВ диапазона типа Р-873 соответственно. Блок 36 может быть выполнен, например, на плате процессорной 5066-586-133MHz-1 MB, 2 MB Flash CPU Card фирмы Octagon Systems или непосредственно на встроенных модулях ПЭВМ типа «Багет-01-07» ЮКСУ.466225.001.
Литература
1. Патент РФ №52 290 U1. М. кл. H04B 7/26, 2006.
2. В.В. Бочкарев, Г.А. Крыжановский, Н.Н. Сухих «Автоматизированное управление движением авиационного транспорта», М.: Транспорт, 1999 г.
3. Патент РФ №103 046 U1. М. кл. H04B 7/26, 2011 (прототип).
4. М. Сколник. Введение в технику радиолокационных систем: Пер. с англ. - М.: Мир, 1965, 747 с.
5. Д.С. Конторов, Ю.С. Голубев-Новожилов. Введение в радиолокационную системотехнику. - М.: Сов. Радио, 1971, 367 с.
6. Патент РФ №44 907 U1. М. кл. H04B 7/00, 2005.
7. Руководство по ВЧ-линии передачи данных (Doc9741 - AN/962). Издание первое. - ICAO, 2000, 148 с.
8. Б.И. Кузьмин «Сети и системы цифровой электросвязи», часть 1 «Концепция» ИКАО CNS/ATM. М. - СПб.: ОАО «НИИЭР», 1999, 206 с.
9. GPS - глобальная система позиционирования. - М.: ПРИМ, 1994, 76 с.
Система радиосвязи с подвижными объектами (ПО), состоящая из передающих станций ДКМВ диапазона в количестве В штук, а также из М наземных комплексов (НК), соединенных радиоканалами связи с N подвижными объектами (ПО), между собой передающие станции ДКМВ диапазона и НК соединены двухсторонними связями с помощью наземной сети передачи данных с входом/выходом системы, причем наземный комплекс содержит наземные антенны MB и ДКМВ диапазонов, подключенные двухсторонними связями через последовательно соединенные соответствующие наземные радиостанции MB и ДКМВ диапазонов, наземную аппаратуру передачи данных к первому входу/выходу вычислителя автоматизированного рабочего места (АРМ), первый вход которого подключен к приемнику сигналов глобальных навигационных спутниковых систем, второй вход - к пульту управления АРМ, а выход - к монитору АРМ, наземный формирователь типа ретранслируемых сообщений, соединенный с третьим входом вычислителя АРМ, первый и второй входы/выходы наземной радиостанции ДКМВ диапазона подключены двухсторонними связями к соответствующим входам/выходам вычислителя АРМ и наземной аппаратуры передачи данных соответственно, а третий вход/выход - к наземной антенне ДКМВ диапазона, модуль сопряжения, подключенный двухсторонними связями к соответствующим входам/выходам вычислителя АРМ и наземной сети передачи данных с входом/выходом системы, К направленных приемных антенн ДКМВ диапазона с соответствующими К приемниками ДКМВ диапазона, соединенными двухсторонними связями с соответствующими К входами/выходами вычислителя автоматизированного рабочего места, В передающие станции ДКМВ диапазона по радиоканалам подключены к М наземным комплексам, в состав каждого из подвижных объектов входят бортовые датчики, приемник сигналов глобальных навигационных спутниковых систем, анализатор типа принимаемых сообщений и бортовой формирователь типа ретранслируемых сообщений, каждый из которых соединен с соответствующими входами бортового вычислителя, вход/выход которого подключен к двунаправленной шине системы управления подвижным объектом, бортовой вычислитель соединен с входом блока регистрации данных и через последовательно соединенные бортовую аппаратуру передачи данных, бортовую радиостанцию MB диапазона подключен к бортовой антенне MB диапазона, первый и второй входы/выходы бортовой радиостанции ДКМВ диапазона подключены двухсторонними связями к соответствующим входам/выходам бортового вычислителя и бортовой аппаратуры передачи данных соответственно, а третий вход/выход - к бортовой антенне ДКМВ диапазона, причем передача данных с НК обеспечивается по цепочке последовательно соединенных первого ПО, второго ПО и далее до N-го ПО, а передача данных с N-го ПО на НК осуществляется в обратном порядке, каждая из В передающих станций ДКМВ диапазона содержит передающую антенну ДКМВ диапазона, подключенную через последовательно соединенные передатчик ДКМВ диапазона и формирователь сигналов к соответствующему входу/выходу вычислителя АРМ передающей станции ДКМВ диапазона, первый вход которого подключен к приемнику сигналов глобальных навигационных спутниковых систем, второй вход - к пульту управления АРМ передающей станции ДКМВ диапазона, а выход - к монитору АРМ передающей станции ДКМВ диапазона, модуль сопряжения, подключенный двухсторонними связями к соответствующим входам/выходам вычислителя АРМ передающей станции ДКМВ диапазона и наземной сети передачи данных с входом/выходом системы, в каждом ПО системы приемная антенна ДКМВ диапазона подключена к m параллельно соединенным приемникам ДКМВ диапазона, отличающаяся тем, что в состав каждого ПО дополнительно введен блок хранения данных с входом для загрузки данных, подключенный двухсторонними связями к соответствующему входу/выходу бортового вычислителя, в каждом ПО системы m параллельно соединенных приемников ДКМВ диапазона подключены двухсторонними связями к соответствующим m входам/выходам бортовой аппаратуры передачи данных, высокочастотные выходы передающих станций ДКМВ диапазона соединены с соответствующими входами подвижных объектов, на каждом ПО имеется вход для приема радиосигналов известных передатчиков ДКМВ диапазона.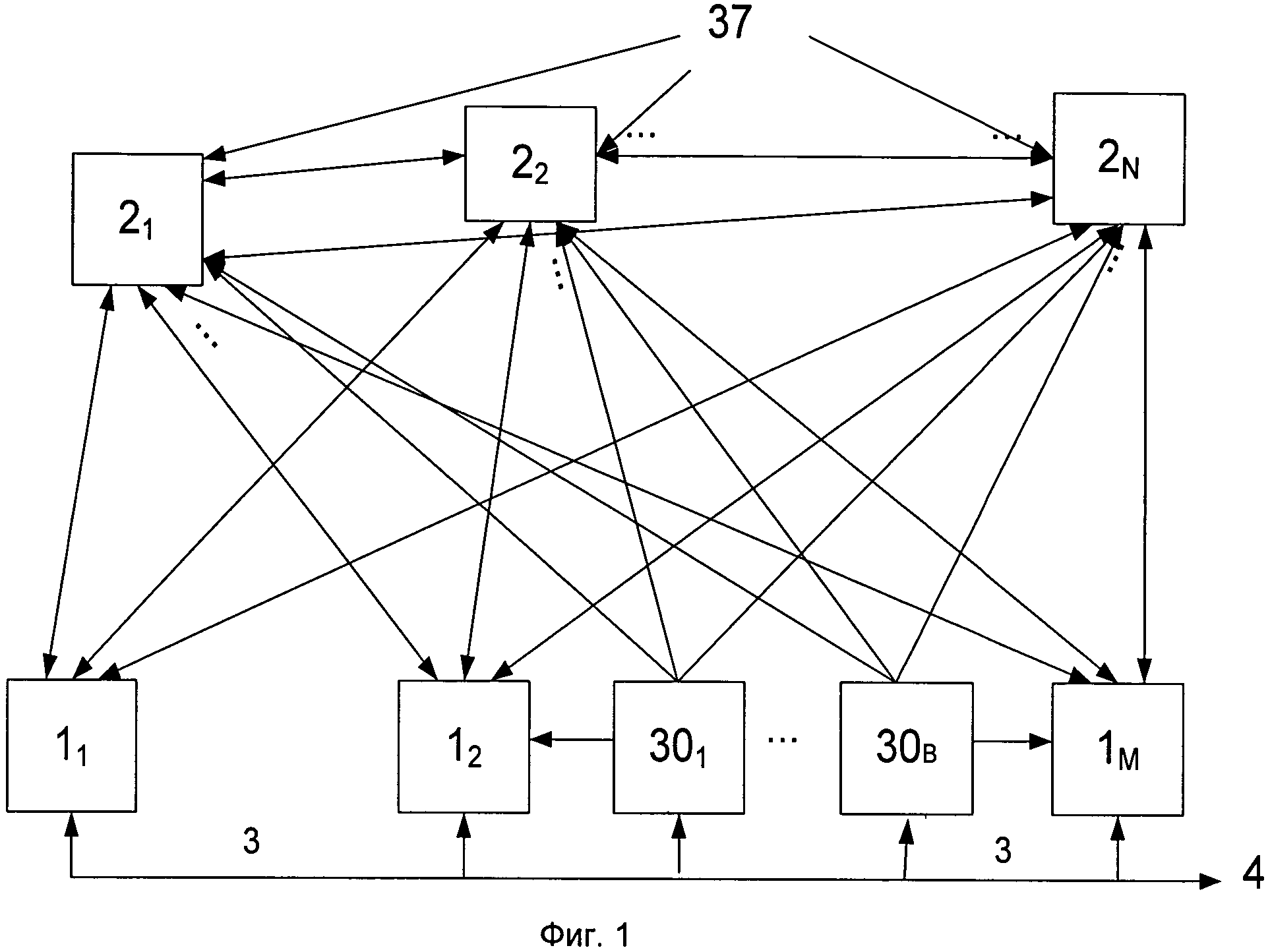
Подвижный комплекс средств связи
Способ повышения температурной стабильности частоты узкополосного фильтра на пав и узкополосный фильтр на пав с повышенной температурной стабильностью частоты
Способ адаптивной радиосвязи на дальних радиотрассах в дкмв диапазоне
Система радиосвязи с воздушными объектами
Способ комплексного телемониторинга подвижных объектов
Способ обмена сообщениями в цифровых сетях радиосвязи с пакетной передачей информации
Способ радиосвязи с подвижными объектами
Система радиосвязи с подвижными объектами
Способ радиосвязи с подвижными объектами
Устройство ретрансляции дискретных сигналов
Подвижный комплекс средств связи
Способ повышения температурной стабильности частоты узкополосного фильтра на пав и узкополосный фильтр на пав с повышенной температурной стабильностью частоты
Способ адаптивной радиосвязи на дальних радиотрассах в дкмв диапазоне
Система радиосвязи с воздушными объектами
Способ комплексного телемониторинга подвижных объектов
Способ обмена сообщениями в цифровых сетях радиосвязи с пакетной передачей информации
Способ радиосвязи с подвижными объектами
Система радиосвязи с подвижными объектами
Способ радиосвязи с подвижными объектами
Устройство ретрансляции дискретных сигналов

