Результат интеллектуальной деятельности: СПОСОБ КОМПЛЕКСНОГО ТЕЛЕМОНИТОРИНГА ПОДВИЖНЫХ ОБЪЕКТОВ
Вид РИД
Изобретение
Изобретение относится к системам сигнализации, реагирующим на несколько нежелательных или ненормальных событий, с последовательным обменом данными по радиоканалам связи через базовые станции, находящиеся между диспетчерским пунктом и подвижными объектами (ПО) наблюдения, определяющими свое местоположение и состояние.
Заявляемый способ предназначен для обеспечения непрерывного самоконтроля и дистанционного персонифицированного наблюдения состояния подвижных объектов относительно диспетчерского пункта и окружающей их среды, передачи сведений о них по радиоканалам связи через две базовые станции на диспетчерский пункт, а также определения их местоположения в рабочей зоне с отображением результатов на диспетчерском пункте.
Способ может быть использован для наблюдения за персоналом, действующим в условиях повышенного риска, например подразделений МЧС, действующих в условиях ликвидации последствий природных и техногенных катастроф, групп силовых структур, выполняющих специальные операции, а также при стихийных бедствиях, техногенных катастрофах, тушении пожаров, горноспасательных операциях и т.п. Использование заявляемого способа позволяет подвижным объектам связываться друг с другом, непрерывно осуществлять самоконтроль параметров своего состояния и параметров окружающей среды, передавать эти сведения по радиоканалам связи через две базовые станции на диспетчерский пункт, а в диспетчерском пункте контролировать эти параметры и при необходимости передавать на подвижные объекты рекомендации о дальнейших действиях с учетом местоположения подвижных объектов. Результаты мониторинга позволяют оперативно оценивать сложившуюся ситуацию, принимать меры по оказанию помощи персоналу, эвакуации его и т.п., а за счет этого повысить выживаемость людей в экстремальных условиях.
Во всех рассмотренных выше случаях проблема дистанционного наблюдения за подвижными объектами распадается на решение следующих задач:
идентификационную, заключающуюся в выборе определенного подвижного объекта среди множества подобных и организации обмена данными с ним;
навигационную, заключающуюся в определении местоположения выбранного объекта, направления, скорости движения и экстраполяции местонахождения объекта через заданный интервал времени;
телеметрическую, состоящую в дистанционном измерении параметров состояния выбранного объекта и окружающей его среды, передачу их через две базовые станции на диспетчерский пункт для анализа и при необходимости трансляции через две базовые станции на подвижные объекты рекомендации об их дальнейших действиях;
управляющую, заключающуюся в возможности влиять на существующую обстановку, и действия, выполняемые подвижными объектами;
информационную, заключающуюся в обеспечении с диспетчерского пункта подвижного объекта необходимыми данными и организации радиосвязи между подвижными объектами по принципу «каждый с каждым» как через две базовые станции, так и напрямую.
Определим термины, содержащиеся в названии изобретения.
Подвижный объект - объект, изменяющий свое положение относительно диспетчерского пункта.
Мониторинг - наблюдение за состоянием окружающей среды (атмосферы, гидросферы, техногенных систем) с целью контроля, прогноза и охраны (Большой энциклопедический словарь. М.,1999).
Под телемониторингом будем понимать дистанционное решение задач мониторинга разнесенных в пространстве подвижных объектов.
Комплексный телемониторинг означает одновременное наблюдение в рабочей зоне за несколькими параметрами подвижных объектов и окружающей среды, в определяющей степени характеризующими их состояние, и вынесение по полученным данным соответствующего решения с диспетчерского пункта.
Особенности задачи, решаемой заявляемым способом, состоят в следующем.
1. Подвижный характер объектов наблюдения, базовых станций и диспетчерского пункта предполагает использование беспроводных радиоканалов связи.
2. Необходимость идентификации десятков-сотен объектов с их датчиками делает ее более сложной по сравнению с наблюдением за летательными аппаратами и другими транспортными средствами.
3. Неопределенность зоны наблюдения, состояния, конкретного местоположения и траектории движения объектов наблюдения.
4. Необходимость дистанционного контроля с диспетчерского пункта и самоконтроля состояния каждого подвижного объекта, причем параметры состояния более сложны, чем в случае охранной сигнализации, где состояние оценивается по правилу "открыто - закрыто".
5. Необходимость контроля состояния среды, окружающей конкретный объект наблюдения. Для окружающей среды характерны те же сложности параметров состояния, что и в предыдущем случае.
6. Необходимость непрерывной реализации операции по пунктам 4 и 5 в течение неопределенного заранее промежутка времени.
7. Необходимость автономной оценки объектом наблюдения собственного состояния и состояния окружающей среды, постоянной передачи этих данных в диспетчерский пункт.
8. Необходимость централизованной оценки на диспетчерском пункте обстановки в рабочей зоне и при необходимости предупреждения объектов наблюдения об опасных участках.
9. Необходимость непрерывного контроля на диспетчерском пункте технического состояния специального оборудования системы телемониторинга: мониторов объектов наблюдения, базовых станций и диспетчерского пункта; вынесение решения о восстановлении оборудования в случае выхода его из строя.
Все перечисленные задачи необходимо решать комплексно и оперативно во всей рабочей зоне.
Известен "Способ наблюдения за транспортными средствами на маршруте движения" [1], заключающийся в том, что задают маршрут движения, номер и плановые текущие координаты подвижного транспортного средства на маршруте, принимают подвижным транспортным средством навигационные сигналы от глобальной спутниковой системы радионавигации, выделяют из принятых навигационных сигналов информацию о действительных текущих координатах подвижного транспортного средства, информацию о подвижном транспортном средстве преобразуют в электрический сигнал и периодически передают через систему сотовой связи в информационно-аналитический центр, где информацию принимают, обрабатывают, хранят и отображают, сравнивают действительные текущие координаты подвижного транспортного средства с плановыми, а при возникновении нештатной ситуации отображают на электронной карте местности текущие и заданные координаты этого подвижного транспортного средства, при наличии сигнального сообщения отображают также смысловое содержание, время передачи сигнального сообщения и номер транспортного средства, на основе анализа полученной информации принимают решение об оперативных действиях.
Недостатком способа является узкий класс решаемых задач и ограниченная область использования. Первый недостаток связан с тем, что наблюдению подвергается практически только маршрут движения транспортного средства и небольшое количество сигнальных сообщений, вводимых водителем вручную. Зоны возможного применения такого способа ограничены областями достижимости системы сотовой связи.
Известен "Способ определения координат подвижных объектов и устройство для его осуществления" [2], заключающийся в том, что задают рабочую зону, на все подвижные объекты устанавливают мониторы и, по крайней мере, три базовые станции m3 радионаблюдения с индивидуальными адресами Ak,, а также диспетчерский пункт, который соединяют каналом связи с одной базовой станцией - центральной (j=1), для зондирования излучают последовательно радиосигналы адреса и прямой измерительный, измерительные сигналы дальности формируют не менее чем на двух базовых станциях и передают по радиоканалу в центральную базовую станцию, а затем по каналу связи в диспетчерский пункт, где вычисляют координаты соответствующих объектов. Данный способ предназначен для обеспечения охраны подвижных объектов с использованием радиоканала с возможностью определения их координат при нападении или несанкционированном проникновении. Способ предполагает наличие на подвижном объекте монитора (абонентского сигнализатора), который в нештатной ситуации связывается по радиоканалу с базовыми станциями, сообщая свой адрес и вырабатывая измерительный сигнал.
Недостатками данного способа являются отсутствие возможности организации радиосвязи между подвижными объектами по принципу «каждый с каждым» как через базовые станции, так и напрямую, низкая помехозащищенность, надежность мониторинга и узкий класс решаемых задач. Низкая надежность обусловлена тем, что данный способ основан на асинхронном способе взаимодействия монитора на подвижном объекте и базовых станций, т.е. обмен информацией начинается только при возникновении нештатной ситуации, либо при контрольном вызове диспетчерского пункта объектом наблюдения при проверке работы системы. В остальное время все элементы пассивны и не взаимодействуют друг с другом. При таком способе, например, выход подвижного объекта из зоны досягаемости или повреждение (отключение) монитора остается незаметным. Узкий класс решаемых задач, во-первых, связан с тем, что информационная посылка от монитора содержит лишь ограниченный круг сообщений, содержащих адресную, навигационную и сигнальную ("нападение", "контроль", "вызов скорой помощи" и т.п.), поэтому в диспетчерском пункте формируется ограниченный круг сообщений. Во-вторых, данный способ предполагает стационарное размещение базовых станций и стационарных сигнализаторов с известными и не меняющимися координатами на местности, что не позволяет решать задачу мониторинга оперативно.
Наиболее близким к заявляемому является «Способ комплексного телемониторинга подвижных объектов» [3], который и выбран за прототип. Он заключается в том, что задают рабочую зону на все подвижные объекты, устанавливают мониторы и, по крайней мере, три базовые станции m3, радионаблюдения с индивидуальными адресами Ak, а также диспетчерский пункт, который соединяют каналом связи с одной базовой станцией - центральной (j=1), для зондирования излучают радиосигналы адреса, управляющий и прямой измерительный, измерительные сигналы дальности формируют не менее чем на двух базовых станциях, и передают по радиоканалу в центральную базовую станцию, а затем по каналу связи в диспетчерский пункт, где вычисляют координаты соответствующих объектов. Перед началом телемониторинга задают рабочую зону, устанавливают базовые станции, диспетчерский пункт и мониторы исходя из соответствующих факторов риска, выбирают тип датчиков состояния подвижного объекта и окружающей среды, устанавливают их на подвижные объекты и подключают к соответствующим мониторам, вводят в мониторы индивидуальные предельно допустимые параметры состояния подвижного объекта и окружающей среды, внешними средствами определяют координаты одной базовой станции, а также координаты или азимут другой базовой станции на местности, в ходе телемониторинга при изменении количества и положения базовых станций поочередно выбирают и по команде с диспетчерского пункта в центральную базовую станцию зондируют базовые станции, координаты базовых станций отображают в диспетчерском пункте, периодически принимают в мониторы сигналы от датчиков состояния подвижного объекта и окружающей среды, запоминают их показания в виде блока телеметрической информации и сравнивают с предельно допустимыми, при превышении или при поступлении соответствующего управляющего сигнала включают сигнал нештатной ситуации, поочередно выбирают и по команде с диспетчерского пункта в центральную базовую станцию зондируют мониторы. Координаты мониторов отображают в диспетчерском пункте. По окончании зондирования передают блок телеметрической информации выбранного монитора через центральную базовую станцию в диспетчерский пункт, где его принимают, оценивают состояние выбранного подвижного объекта, отображают состояние подвижного объекта, при возникновении нештатной ситуации увеличивают частоту выбора соответствующего монитора, а также принимают меры для помощи подвижному объекту.
Зондирование выбранного объекта - базовой станции или монитора проводят с центральной базовой станции, при этом последовательно излучают радиосигналы адреса выбранного объекта Ak, управляющий и прямой измерительный с одинаковым для всех объектов параметром Q в выбранном объекте, у которого поступивший адрес Ak совпал с собственным адресом. Затем дешифрируют управляющий сигнал и используют для задания режима работы выбранного объекта, принимают прямой, формируют и излучают ответный измерительный радиосигнал с параметром F, отличным от параметра Q радиосигнала, излученного с центральной базовой станции. В каждой невыбранной базовой станции принимают прямой и ответный измерительные радиосигналы, обрабатывают, формируют измерительный сигнал дальности между ней и выбранным объектом.
Однако способу присущи недостатки:
рабочая зона телемониторинга ограничена в самом начале работы зоной прямой видимости с наземных базовых станций, подвижных объектов и диспетчерского пункта на вызываемые абоненты и сокращается при наличии углов закрытия на трассе распространения радиоволн. Учитывая то, что если эти объекты подвижные, то в процессе работы они могут выйти за пределы этой зоны, и тогда будут недоступны для обслуживания с диспетчерского пункта;
при передаче обработанных измерительных сигналов от невыбранных базовых станций в центральную может возникнуть конфликт из-за одновременной передачи информации от нескольких базовых станций;
необходимо постоянное вычисление азимута и дальности базовых станций от диспетчерского пункта, однако погрешность измерения этих величин велика
из-за влияния отражений оцениваемых радиосигналов от местных предметов и вероятностного характера задержки информации при ретрансляции сообщений;
при выходе из строя оборудования центральной базовой станции телемониторинг не обеспечивается;
отсутствует обмен данными между подвижными объектами по принципу «каждый с каждым» и режим передачи голосовых сообщений;
низкая надежность и помехозащищенность радиосвязи при реализации функций телемониторинга из-за передачи всей собранной с подвижного объекта информации в диспетчерский пункт через центральную базовую станцию по одному радиоканалу на одной частоте.
Решаемая задача - совершенствование известного способа телемониторинга.
Технический результат заключается в расширении функциональных возможностей в части упрощения алгоритмов работы и проводимых мероприятий, повышения надежности и помехозащищенности связи при реализации функций телемониторинга.
Под упрощением алгоритмов работы и проводимых мероприятий понимается сведение процедур телемониторинга к выполнению известных операций с помощью типового (серийного) оборудования, уменьшение числа базовых станций, отсутствие необходимости определения дальности и азимута до базовых станций, возможность реализации диспетчерского пункта на подвижном шасси и обеспечения обмена данными между подвижными объектами по принципу «каждый с каждым», в том числе при передаче формализованных голосовых сообщений.
Под повышением надежности и помехозащищенности связи понимается резервирование радиоканалов съема данных с мониторов подвижных объектов на разных частотах и в различные интервалы времени за счет использования двух базовых станций и передачи этих данных на диспетчерский пункт по двум параллельным каналам на разных частотах, приема и выделения наиболее достоверного сообщения для его отображения и анализа.
Технический результат достигается тем, что в способе комплексного телемониторинга подвижных объектов, заключающемся в том, что на все подвижные объекты устанавливают мониторы и подготавливают две базовые станции радионаблюдения с индивидуальными адресами, а также диспетчерский пункт, который соединяют каналом связи с одной базовой станцией, формируют сигналы на двух базовых станциях и передают по радиоканалу в диспетчерский пункт, перед началом телемониторинга устанавливают базовые станции, диспетчерский пункт и мониторы исходя из соответствующих факторов риска, выбирают тип датчиков состояния подвижного объекта и окружающей среды, устанавливают их на подвижные объекты и подключают к соответствующим мониторам, вводят в мониторы индивидуальные предельно допустимые параметры состояния подвижного объекта и окружающей среды, внешними средствами определяют координаты двух базовых станций на местности, в ходе телемониторинга при изменении количества и положения базовых станций координаты базовых станций отображают в диспетчерском пункте, периодически принимают в мониторы сигналы от датчиков состояния подвижного объекта и окружающей среды, запоминают их показания в виде сообщения (блока телеметрической информации) и сравнивают с предельно допустимыми, при превышении или при поступлении соответствующего управляющего сигнала с диспетчерского пункта включают сигнал нештатной ситуации, поочередно выбирают мониторы и отображают их координаты в диспетчерском пункте, блок телеметрической информации выбранного монитора передают через базовую станцию в диспетчерский пункт, где его принимают, оценивают состояние выбранного подвижного объекта, отображают состояние подвижного объекта, при возникновении нештатной ситуации увеличивают частоту опроса соответствующего монитора, а также принимают меры для помощи подвижному объекту, обе базовые станции устанавливают на летательные несущие платформы и перед началом телемониторинга их поднимают в воздух, в диспетчерском пункте, на мониторах подвижных объектов и базовых станциях после включения оборудования осуществляют взаимную синхронизацию мониторов всех объектов, участвующих в телемониторинге, обеспечивают единую адресацию, известную всем участникам телемониторинга, и устанавливают на них приемники сигналов глобальных навигационных спутниковых систем, данные которых используют для определения местоположения объектов и формирования на них шкалы единого точного времени, определяют для каждого подвижного объекта конкретный монитор, при расширении рабочей зоны увеличивают высоту подъема летательных несущих платформ, с помощью шкалы единого точного времени на базовых станциях формируют на разных частотах маркеры в разнесенные интервалы времени и выделяют слоты для приема/передачи данных с каждого (на каждый) монитор подвижного объекта, по маркеру на мониторе подвижного объекта определяют время передачи данных на соответствующую базовую станцию (соседний монитор) или приема сообщений с нее (соседнего монитора), местоположение диспетчерского пункта, базовых станций, вызываемого подвижного объекта, в диспетчерском пункте по принятым с подвижного объекта сообщениям о его местоположении и параметрам движения отображают его местонахождение на карте местности, строят экстраполированную траекторию движения, оценивают возможность попадания выбранного подвижного объекта в опасный район, выдают через базовые станции рекомендации по преодолению нештатной ситуации, диспетчерский пункт соединяют каналом связи со второй базовой станцией, поочередно или в связи с обострившейся ситуацией с диспетчерского пункта выбирают подвижный объект и в заданный интервал времени через базовые станции организуют обмен данными с соответствующим монитором выбранного подвижного объекта, обеспечивают обмен данными между подвижными объектами как по принципу «каждый с каждым», так и через базовые станции, контролируют достоверность этого обмена на базовых станциях, а результаты контроля передают на диспетчерский пункт, для двунаправленной трансляции кодограмм по цепи «базовые станции - диспетчерский пункт» используют две частоты, для каждой базовой станции своя, а для разделения направлений обмена информацией по цепи «базовые станции - диспетчерский пункт» - временной доступ в радиосеть, формализуют фразы, необходимые подвижным объектам для работы, переводят их в цифровые сообщения, записывают в память вычислительных средств мониторов и диспетчерского пункта, при необходимости нужное сообщение выводят из памяти вычислительных средств мониторов или диспетчерского пункта и с признаком выбранного подвижного объекта после преобразования в радиосигнал на двух частотах излучают в эфир, в базовых станциях после оценки правильности приема сообщений осуществляют преобразования формата данных, принятого на диспетчерском пункте, в формат данных, необходимый для организации радиосети «базовые станции - подвижные объекты» или выполнение обратной процедуры, формирование двух соответствующих радиосигналов и излучение в эфир, при приеме радиосигналов на мониторе или диспетчерском пункте и преобразовании их в видеосигналы выбирают из двух принятых сообщений наиболее достоверное, дешифрируют его и при совпадении принятого адреса с адресом ПО выводят информацию на соответствующий экран для визуального съема или - при посылке формализованного речевого сообщения - для звукового воспроизведения.
Обоснование технического результата:
- мобильность базовых станций, диспетчерского пункта и подвижных объектов с мониторами связана с назначением предлагаемого способа и априорной неопределенностью условий их функционирования (факторов риска), необходимостью организации связи с подвижными объектами, находящимися в радиотени за крупными местными предметами и в складках местности;
- ввод в мониторы индивидуальных предельно допустимых параметров состояния подвижного объекта и окружающей среды при установке или через базовую станцию по радиоканалу позволяет иметь в памяти монитора показатели условий, соответствующие реальным условиям применения, с учетом типа использующихся датчиков и их динамических характеристик, а также с учетом индивидуальных свойств подвижного объекта;
- определение координат подвижных объектов, базовых станций и диспетчерского пункта обеспечивается с помощью высокоточной координатной информации с выхода соответствующих приемников глобальных навигационных спутниковых систем, например, типа ГЛОНАСС или NAVSTAR;
- периодический прием в мониторы сигналов от датчиков состояния подвижного объекта и окружающей среды и запоминание их показаний в мониторе в виде сообщения - блока телеметрической информации позволяет непрерывно с точностью до времени кадра и активно (по инициативе монитора) осуществлять как контроль параметров состояния самого объекта, так и окружающей среды, т.е. проводить комплексный мониторинг и осуществлять обмен данными с соседними подвижными объектами по принципу «каждый с каждым». Блок телеметрической информации может содержать информацию о текущих показаниях датчиков состояния подвижного объекта и окружающей среды, а также местоположения и параметры движения монитора и т.п.;
- сравнение в мониторе результатов оценки показаний датчиков состояния с предельно допустимыми величинами и включение сигнала нештатной ситуации как непосредственно, так и через базовые станции с диспетчерского пункта, придает монитору определенный "интеллект", что позволяет объекту наблюдения не тратить время и силы на наблюдение за соответствующими датчиками и измерителями, непосредственно на месте действий оценить сложившуюся ситуацию, в том числе и по параметрам состояния, неощутимым для подвижного объекта, и принять рекомендуемые диспетчерским пунктом меры;
- оценка принимаемых от подвижного объекта радиосигналов в базовой станции позволяет определить его работоспособность - отсутствие радиосигнала в заданном слоте или некоторые показания датчиков могут расцениваться в диспетчерском пункте как "нештатная ситуация" с соответствующей реакцией;
- передача блока телеметрической информации выбранного монитора, хранящегося в его памяти, через базовую станцию в диспетчерский пункт, оценка и отображение позволяют непрерывно контролировать состояние подвижных объектов и окружающей их среды в интересах службы спасения, оказания помощи подвижным объектам, предупреждения населения и т.п. В известных аналогах сигнальные сообщения от мониторов сами по себе являются свидетельствами нештатной ситуации, но не позволяют качественно оценить реальные события, случившиеся с объектом и вокруг него.
Заявляемый способ иллюстрируется чертежами.
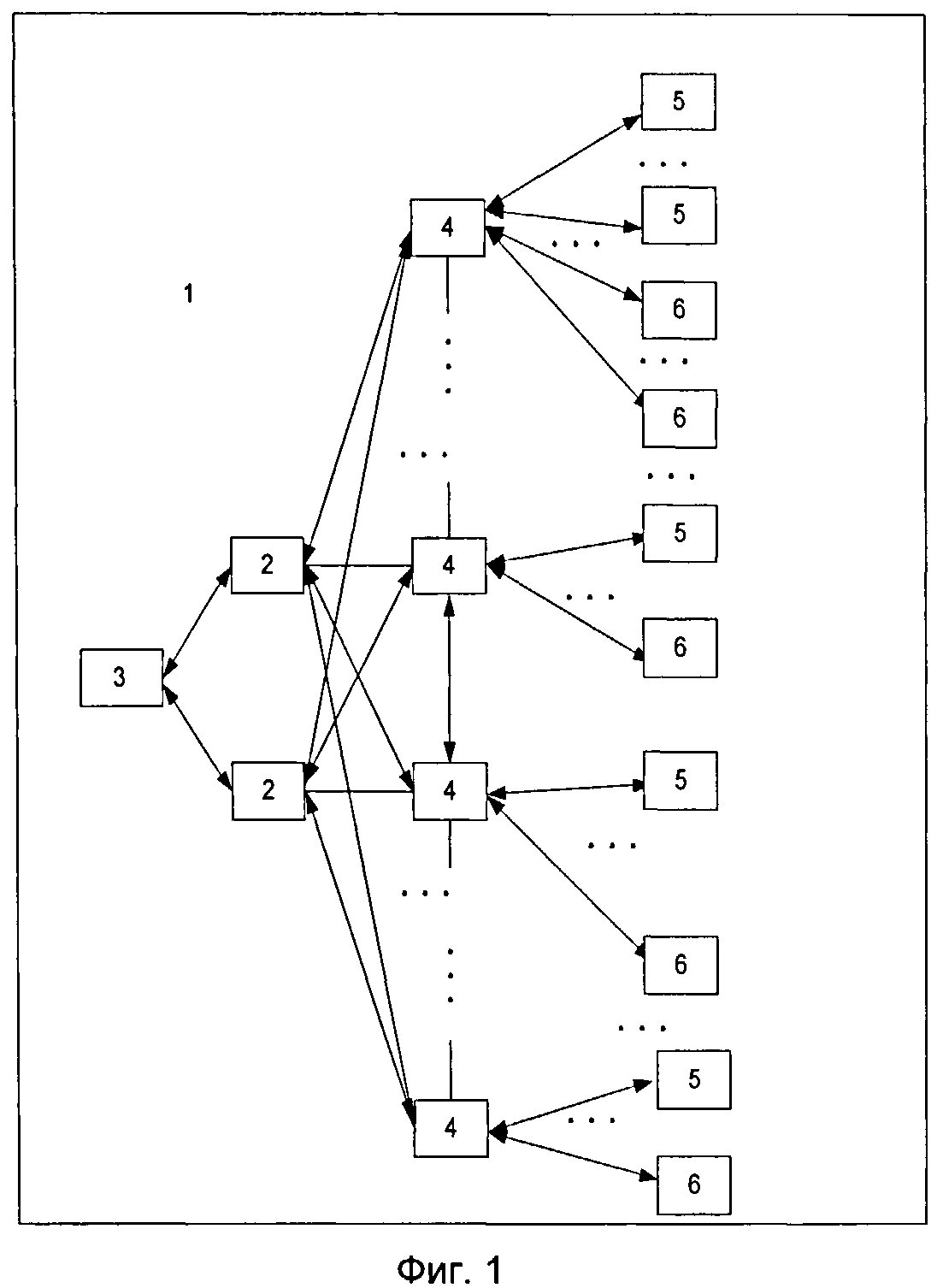
Фиг.1 - структурная схема устройства, обеспечивающего заявляемый способ телемониторинга подвижных объектов;
фиг.2 - структурная схема монитора подвижного объекта с датчиками;
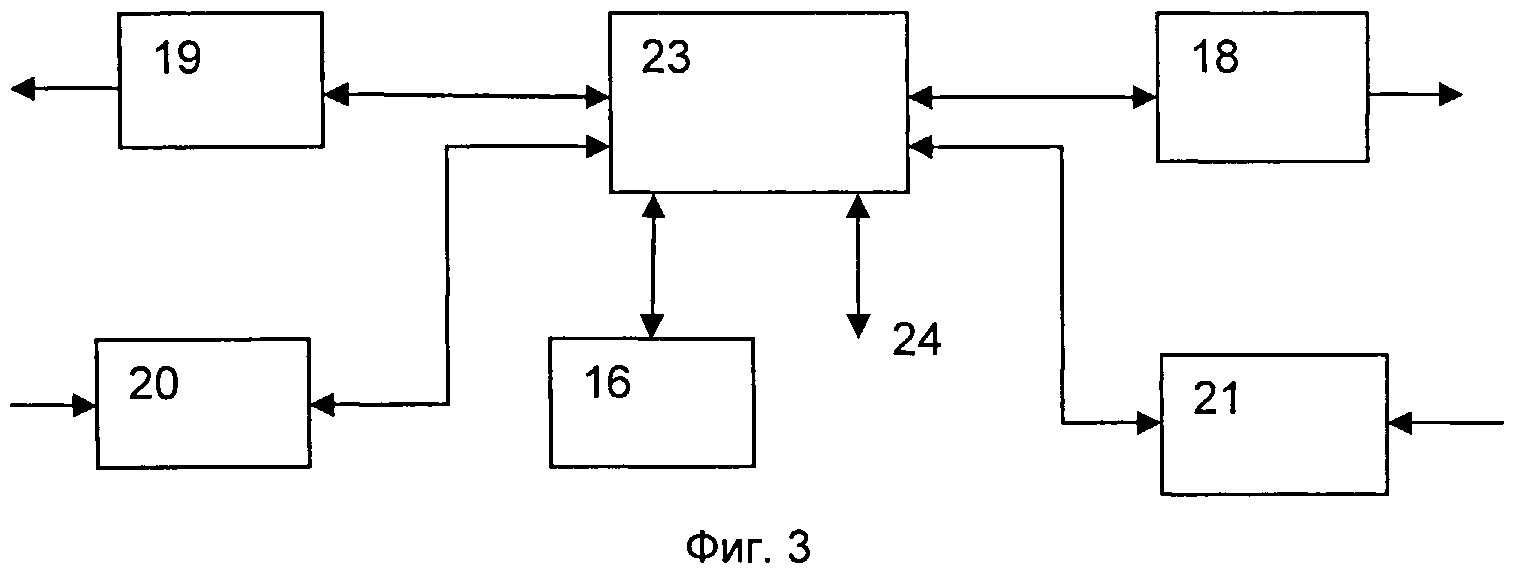
фиг.3 - структурная схема базовой станции;
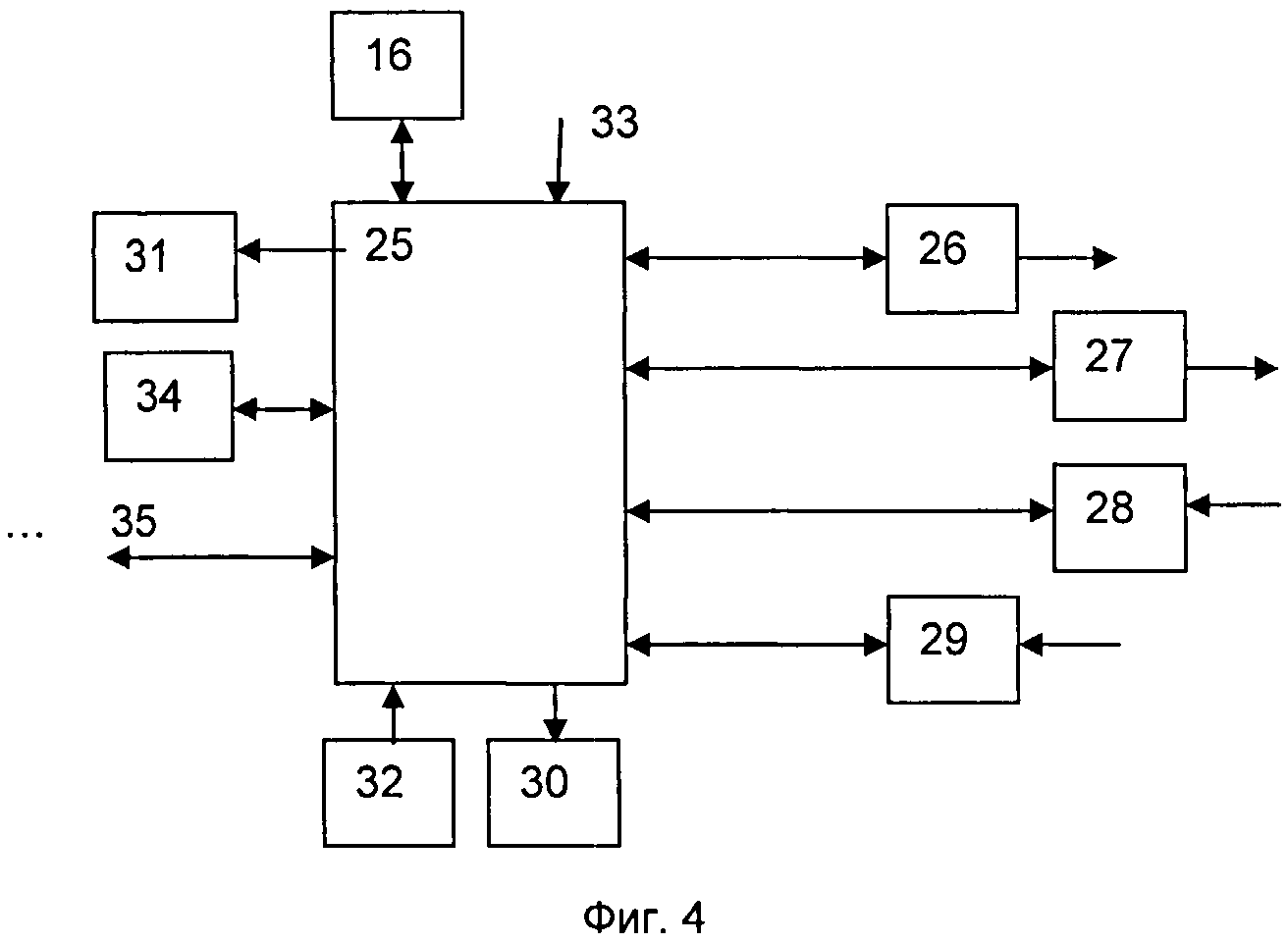
фиг.4 - структурная схема диспетчерского пункта;
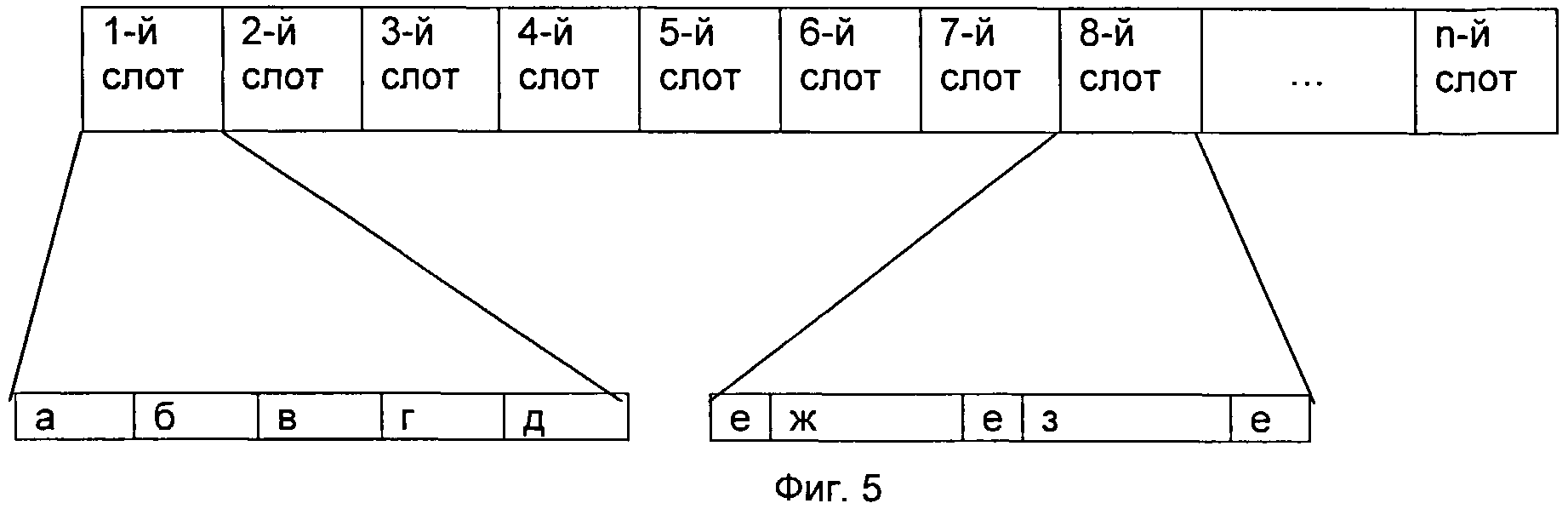
фиг.5 - один из вариантов структуры кадра, предназначенного для обмена данными.
Структурные схемы включают в себя следующие элементы: 1 - рабочая зона; 2 - базовые станции; 3 - диспетчерский пункт; 4 - подвижные объекты с мониторами; 5 - датчики состояния подвижных объектов, 6 - датчики состояния среды, окружающей подвижные объекты; 7 - коммутатор датчиков состояния подвижных объектов; 8 - аналого-цифровой преобразователь (АЦП); 9 - процессор монитора; 10 - первый передатчик монитора с антенной; 11 - первый приемник монитора с антенной; 12 - второй передатчик монитора с антенной; 13 - второй приемник монитора с антенной; 14 - сигнализатор нештатной ситуации; 15 - канал ввода данных монитора; 16 - приемник сигналов глобальных навигационных спутниковых систем; 17 - дисплей монитора; 18 - первый передатчик базовой станции с антенной; 19 - второй передатчик базовой станции с антенной; 20 - первый приемник базовой станции с антенной; 21 - второй приемник базовой станции с антенной; 22 -клавиатура монитора; 23 - процессор базовой станции; 24 - канал ввода данных базовой станции; 25 - процессор диспетчерского пункта; 26 - первый передатчик диспетчерского пункта с антенной; 27 - второй передатчик диспетчерского пункта с антенной; 28 - первый приемник диспетчерского пункта с антенной; 29 - второй приемник диспетчерского пункта с антенной; 30 - схема сигнализации; 31 - дисплей диспетчерского пункта; 32 - клавиатура диспетчерского пункта; 33 - канал входа /выхода данных; 34 - звуковоспроизводящая схема; 35 - канал входа/выхода для подключения дополнительных рабочих мест (при необходимости); 1-й, 2-й…n-й - временные слоты (ячейки) кадра; а, б…з - временные интервалы слотов, используемые для передачи различной информации.
Реализация заявляемого способа сводится к следующему.
Оперативно перед началом телемониторинга исходя из факторов риска, размера охватываемой территории, на которой предполагается нахождение подвижных объектов, мощности передатчиков, чувствительности приемников, длительности непрерывной работы и других факторов, устанавливают две базовые станции БС21 и БС22 на соответствующее количество летательных несущих платформ: вертолетов или самолетов. В диспетчерском пункте 3 на мониторах подвижных объектов 4 и базовых станциях 2 устанавливают приемники 16 сигналов глобальных навигационных спутниковых систем. После включения оборудования с помощью меток точного времени с выходов приемников 16 сигналов глобальных навигационных спутниковых систем, например ГЛОНАСС, осуществляют взаимную синхронизацию оборудования всех объектов, участвующих в телемониторинге, обеспечивают единую адресацию, известную всем участникам телемониторинга.
Затем две базовые станции БС21 и БС22 на соответствующих летательных несущих платформах поднимают в воздух. Высоту подъема определяют таким образом, чтобы обеспечить через две базовые станции 2 устойчивую радиосвязь с подвижными объектами 4 на местности, превышающей размер рабочей зоны 1 с учетом препятствий и возвышенностей на пути распространения радиоволн. Если длительность телемониторинга превышает максимально возможное время пребывания в воздухе летательных несущих платформ, то на смену им подготавливают следующие две - также с базовыми станциями 2. До окончания полета первой пары летательных несущих платформ подготавливают операцию «хэндофф» (handoffs) [4]. На диспетчерский пункт 3 возлагают обязанность управлять передачами сигналов связи в пределах рабочей зоны 1, определяющей местонахождение подвижных объектов. Передача и прием данных диспетчерским пунктом 3 и базовой станцией 2 дежурной летательной несущей платформы, как правило, не должны осуществляться до тех пор, пока не закончится заданное время полета основной платформы на необходимой (для обеспечения устойчивой связи) высоте и меняющая его платформа не выйдет на маршрут, новая базовая станция 2 не установит связь со всеми подвижными объектами, что должно быть подтверждено с нее специальной квитанцией, и вычислительные средства диспетчерского пункта 3 не определят качество всех каналов, например, по требуемым уровням отношения сигнал/шум. Соответствующие квитанции и знаки, характеризующие выполнение указанных операций, отображаются на экране дисплея 31 рабочего места диспетчерского пункта.
После того как выполнены эти операции, диспетчерский пункт 3 инициирует процедуру handoffs и устанавливает новую линию связи с новой базовой станцией 2, отключая старую. Обе базовые станции 2 должны продолжать обеспечивать обмен данными с подвижными объектами до тех пор, пока не появится индикация, подтверждающая успешное установление нового соединения. Если диспетчерский пункт 3 принимает решение, что параметры системы приемлемы для обеспечения связи, то новое подключение считается успешным. Любую последующую связь «земля-воздух-земля» осуществляют по новой виртуальной цепи (VC), а старую VC временно используют только для приема, практически до посадки летательной несущей платформы. И такие операции продолжают до окончания работ. Маршрут барражирования платформы выбирают из условия обеспечения устойчивой радиосвязи во время полета со всеми мониторами подвижных объектов 4 в рабочей зоне, например по кругу.
В диспетчерском пункте 3 на мониторах подвижных объектов 4 и базовых станциях 2 используют выходную информацию приемников 16 сигналов глобальных навигационных спутниковых систем для определения местоположения объектов и формирования шкалы единого точного времени и слотов (временных интервалов), в каждом из которых обеспечивается передача и прием данных для каждого абонента, участвующего в телемониторинге.
Диспетчерский пункт 3 обеспечивает обмен пакетами данных через бортовую базовую станцию 2 с мониторами наземных подвижных объектов 4 следующим образом:
- с помощью шкалы единого точного времени на базовых станциях 2 формируют на разных частотах маркеры в разнесенные интервалы времени и выделяют слоты для приема/передачи данных с каждого (на каждый) монитора подвижного объекта 4;
- по маркеру, передаваемому в первом слоте, на мониторе подвижного объекта 4 определяют время передачи данных на соответствующую базовую станцию 2 (соседний монитор) или приема сообщений с нее (соседнего монитора), местоположение диспетчерского пункта 3, базовых станций 2, монитора вызываемого подвижного объекта 4;
- для обеспечения заданного уровня надежности связи в зоне ответственности каждой БС 2 из общего списка частот ДП 3 назначают для каждой БС одну из набора активных частот связи, оптимальную по условиям распространения радиоволн и электромагнитной совместимости;
- ДП 3 доводит назначенный набор частот вместе с интервалом времени его активизации в рабочей зоне до каждой из двух рабочих и дежурных БС 2 через радиоканалы связи;
- время использования каждого частотного канала разбивают на временные кадры, а каждый кадр делится на n временных слотов. Длительность кадра определяется допустимой скоростью передачи данных в заданном радиоканале связи при требуемой достоверности и максимальным числом ПО, равным (n-m), где m - число слотов, отведенных для обмена данными между базовым станциями 2 и мониторами ПО 4 в режиме широковещания. При возрастании объема снимаемой с ПО 4 информации, например, при передаче изображения по командам с ДП 3 обмен данными в направлениях БС21-ДП, БС22-ДП организуют практически в реальном масштабе времени.
Для исключения коллизий при обмене данными между двумя мониторами подвижных объектов 4 непосредственно предусмотрена следующая процедура: передачу данных на монитор адресуемого подвижного объекта 4 через БС 2 осуществляют только в следующем кадре после получения соответствующего запроса связи и в том случае, если отсутствовал обмен данными между этими абонентами в предыдущем кадре.
В процессе обмена данными пакетное сообщение от монитора ПО 4 для диспетчерского пункта 3, содержащее адрес получателя и адрес отправителя, информацию с датчиков о местоположении ПО и другие упаковывают в процессоре 9 подвижного объекта в пакет, предназначенный для передачи по радиоканалу, затем передают по радиоканалу через БС 2 на ДП 3, на котором зарегистрированы все мониторы ПО 4 в рабочей зоне 1. На ДП 3 принятое сообщение обрабатывают, при необходимости отображают и выносят решения, требующие от ПО проведения срочных действий.
В обратном направлении пакетное сообщение от диспетчерского пункта 3, содержащее адрес получателя - (идентификатор монитора ПО 4), а также адрес отправителя (ДП) и соответствующую команду управления, упаковывают в пакет, предназначенный для передачи по радиоканалу, и затем передают по радиоканалу через БС 2 к монитору адресата. С монитора сообщение визуально (с экрана) или в речевой форме, например, сформированной в вокодере, с помощью звукопроводящей схемы 34 доводится до подвижного объекта.
В случае возникновения неисправности интерфейса между одной из БС 2 и ПО 4, вторая БС 2 передает широковещательно в маркере для всех зарегистрированных на ней ПО 4 команду на смену частоты связи с кодом причины «неисправность». Затем прекращается обмен пакетными данными через радиоканалы между БС 2 с неисправным интерфейсом, зарегистрированными на ней подвижными объектами, и диспетчерским пунктом, до момента устранения неисправности. Отключение неисправной БС 2 не снижает качество обслуживания ПО 4, поскольку каждая из БС 2 рассчитана на обслуживание всех ПО 4 в рабочей зоне. При работе одной БС 2 процедура обмена данными по цепи «БС-ПО» аналогична используемой при работе с соответствующей базовой станцией планшетного компьютера типа «iPad-3g» [5], например стандарта WiFi (беспроводной широкополосный доступ, который основан на стандарте IEEE 802.11).
В диспетчерском пункте 3 по принятым с монитора подвижного объекта 4 сообщениям о его местоположении и параметрам движения отображают его местонахождение на карте местности, строят экстраполированную траекторию движения, оценивают возможность попадания выбранного подвижного объекта опасный район, выдают конкретному ПО через базовые станции 2 необходимые рекомендации по преодолению нештатной ситуации.
Для повышения надежности связи и помехозащищенности диспетчерский пункт 3 соединяют со второй базовой станцией 2 радиоканалом, работающим на частоте, отличной от частоты радиоканала связи диспетчерского пункта 3 с первой базовой станцией 2. Учитывая, что обе базовые станции 2 осуществляют опрос мониторов ПО 4 (состояния их датчиков) на разных частотах, базовые станции 2 имеют свои радиоканалы с диспетчерским пунктом 3 также на разных несущих частотах, то очевидно, что организуются два параллельных радиоканала, транслирующих одинаковую информацию.
Поочередно в относительно спокойной обстановке или в связи с обострившейся ситуацией с диспетчерского пункта 3, например с достижением измеренных датчиком значений предельных величин, выбирают соответствующий подвижный объект 4 или группу объектов и через базовые станции 2 параллельно в заданные интервалы времени увеличивают частоту обмена данными с соответствующим монитором выбранного подвижного объекта 4. Для повышения оперативности обмен данными в заданные интервалы времени между подвижными объектами 4 обеспечивают по принципу «каждый с каждым». Процесс этого обмена контролируют на базовых станциях 2, а результаты контроля передают на диспетчерский пункт 3. Если из-за рельефа местности невозможно организовать обмен данными между подвижными объектами, то эту процедуру осуществляют через поднятые над землей на соответствующую высоту две базовые станции 2 на летательных несущих платформах.
Индивидуальные адреса всех абонентов телемониторинга могут быть заложены в память процессоров 9, 23, 25 при их изготовлении или вводиться с диспетчерского пункта 3 через радиоканалы связи и две базовые станции 2 в мониторы подвижных объектов 4. Перед началом телемониторинга определяют для каждого подвижного объекта конкретный монитор, все ПО 4 с помощью сигналов приемников 16 глобальных навигационных спутниковых систем, являющихся одним из датчиков ПО 4, определяют свои координаты, устанавливают единое системное время путем приема маркеров с первой и второй базовых станций 2, осуществляют взаимную синхронизацию и подготовку к обмену данными. Число слотов - интервалов времени, отведенных для обмена данными, выбирается на два больше, чем число подвижных объектов, чтобы исключить влияние радиосигналов маркеров, которые передаются с одной из БС 2 в первом слоте, на процесс обмена данными второй базовой станции 2 с подвижными объектами 4. То же для первой базовой станции. Этим и разносом по частоте и по времени радиоканалов связи обеспечивают исключение коллизий при одновременной работе двух БС 2. Обмен сообщениями между базовыми станциями 2 через диспетчерский пункт 3 позволяет осуществить телемониторинг ПО 4 за счет создания обходных путей отказавшего оборудования. С помощью процессора 23 БС обеспечивают также контроль работоспособности оборудования базовой станции и всех мониторов ПО 4, а также передачу данных о них в диспетчерский пункт 3.
Оперативно перед началом телемониторинга диспетчерский пункт 3 соединяют радиоканалами связи с двумя равноправными базовыми станциями 2. Равноправность базовых станций 2 заключается в том, что в них в памяти их процессоров 23 сосредотачивают одинаковую информацию о подвижных объектах, которая при потере в одной из них может быть обновлена с базы данных другой через радиоканалы связи и диспетчерский пункт 3. Благодаря постоянному обмену данными между базовыми станциями 2, в памяти их процессоров 23 хранят одинаковую информацию о всех параметрах подвижных объектов 4, что необходимо для повышения надежности оборудования.
Оперативно перед началом телемониторинга на все подвижные объекты 4 устанавливают мониторы. Исходя из соответствующих факторов риска выбирают тип датчиков 5, 6 состояния подвижного объекта и окружающей среды, устанавливают их на подвижные объекты 4 и подключают к соответствующим мониторам. Если объектами наблюдения являются люди, то в качестве датчиков 5 состояния могут выступать датчики температуры, пульса и других наиболее важных физиологических параметров человека. Датчики 6 состояния окружающей среды используют для оценки обстановки, окружающей подвижный объект. В качестве них могут использоваться датчики тех физических величин, которые наиболее важны в условиях данной рабочей зоны, например датчики температуры (при пожарах), датчики уровня радиации (при авариях на ядерных установках), газоанализаторы (при аномальных ситуациях на химических предприятиях) и т.п.
Рассмотрим более подробно процесс обмена данными между диспетчерским пунктом 3 и выбранным объектом (базовой станцией 2 или монитором подвижного объекта 4). Для повышения помехозащищенности применяют методы частотного и временного доступа к среде распространения радиосигналов. Каждому направлению обмена данными: ПО - БС21, ПО - БС22, БС21 - ДП, БС22 - ДП выделяют разные рабочие частоты, а для обмена данными - каждому монитору ПО 4 персональный временной интервал. С диспетчерского пункта 3 в обе базовые станции 2 (фиг.1) поступает команда запроса данных о выбранном объекте. В базовых станциях 2, если данные запрашиваются не о них, формируют кадр запроса данных (фиг.5). Первый слот кадра - маркер - несет информацию о точном системном времени (фиг.5, а), рабочей частоте на следующий кадр (фиг.5, б), широковещательную информацию для всех ПО (фиг.5, в), темп съема данных с датчиков (фиг.5, г), тип датчика (фиг.5, д). Команду преобразуют в сообщение с соответствующей подвижному объекту адресной частью и в заданный интервал времени, также соответствующий выбранному подвижному объекту, последовательно излучают радиосигналы адреса выбранного объекта и данные запроса. При формировании сообщений используют известные методы помехоустойчивого кодирования [4]. Слот для обмена данными разбивают на несколько временных интервалов: для передачи на БС - (фиг.5, ж), для приема на мониторе - (фиг.5, з), для защиты от наложения передаваемых на принимаемые сообщения - (фиг.5, е). Длительность кадра определяется числом обслуживаемых ПО, технической скоростью передачи данных и максимальным числом символов, отводимых для передачи местоположения ПО и показаний его датчиков. Например, при наличии 100 ПО, 40 разрядов, отводимых для передачи широты и долготы ПО, 20 разрядов, отводимых для передачи типа датчика и его показаний, скорости передачи 31,5 кбит/с, характерной для режима VDL-2 в системе управления воздушным движением [4], время кадра с учетом двойной избыточности за счет кодирования и без учета защитных интервалов составит около 0,8 с. В этом случае объем изменяемого информационного пространства, используемого для телемониторинга ПО, можно оценить как 220. Величина защитных интервалов (фиг.5, е) по длительности выбирается большей, чем время прохождения радиосигналом до наиболее удаленного ПО и обратно с учетом времени задержки в ПО и времени на прослушивание несущей радиосообщения в эфире на базовых станциях. В базовых станциях 2 на основании известного собственного местоположения и всех ПО оценивается уровень мощности запросных радиосигналов на ПО: чем ближе ПО к БС, тем меньше уровень передаваемого радиосигнала (адаптация по мощности).
Во всех мониторах подвижных объектов 4 принимают сообщения в выделенных им слотах и дешифрируют адресный сигнал. При совпадении поступившего кода адреса с собственным адресом он включается в работу. Выбранный объект принимает запросное сообщение, которое определяет режим его работы. При этом монитор выбранного подвижного объекта 4 с помощью процессора 9 монитора подвижного объекта переходит в режим излучения на двух частотах (для каждой из двух БС) кодированного сообщения о своем местоположении и информации с запрашиваемого датчика в строго отведенном для него слоте. В базовых станциях 2 эти радиосигналы принимают, обрабатывают с оценкой их достоверности и по параллельным каналам связи с привязкой к времени приема сообщения передают на диспетчерский пункт 3, где после соответствующей обработки отображают отметки от ПО с привязкой к электронной карте местности и выводят данные с датчика. В случае превышения предельных параметров у ПО 4, на ДП 3 включают сигнализацию (схема 30), например визуальную на дисплее или звуковую, и через базовые станции 2 передают на соответствующий ПО 4 предупреждение о нештатной ситуации или перечень необходимых мероприятий. Темп обмена данными задает диспетчерский пункт 3 и он может меняться в зависимости от состояния ПО 4. На диспетчерском пункте 3 по сообщениям о местоположении с двух базовых станций 2 обеспечивают их непрерывное сопровождение, контроль работоспособности и топливного ресурса летательных несущих платформ. При выходе из строя одной БС 2 телемониторинг ПО 4 осуществляют с помощью второй базовой станции. При снижении уровня топлива на летательных несущих платформах через соответствующую БС 2 информируют диспетчерский пункт о необходимости подъема в воздух следующей платформы. Базовые станции работают в автоматическом режиме. При необходимости и наличии на борту летательной несущей платформы оператора обеспечивают подключение к процессору клавиатуры и дисплея по стандартной схеме.
В мониторы подвижных объектов вводят индивидуальные предельно допустимые параметры состояния подвижного объекта и окружающей среды. Если подвижными объектами являются люди, то для каждого из них существуют разные предельно допустимые параметры собственного состояния и состояния окружающей среды, с учетом опыта, физиологических особенностей организма, важности решаемой задачи (в особо важных случаях задача должна быть решена вне зависимости от условий). Сигналы с датчиков 5 и 6 снимают и передают с монитора подвижного объекта 4 в эфир дискретно во времени, например, с интервалом 5, 10, 20 секунд и т.д. или в соответствии с запросом с ДП 3, в зависимости от важности параметра для ПО или окружающей среды. Периодически принимают в мониторы подвижных объектов сигналы от датчиков состояния подвижного объекта 5 и окружающей среды 6, запоминают их показания в мониторе и сравнивают с предельно допустимыми, при превышении включают на мониторе автономно сигнализатор нештатной ситуации 14. Такая сигнализация может срабатывать при превышении параметрами собственного состояния подвижного объекта 4 или внешних условий предельно допустимых уровней, введенных перед началом работ, и позволяет объекту наблюдения (человеку) получить звуковое, световое и т.п. предупреждение о возникновении опасной ситуации, в том числе и в случаях, когда опасность неощутима для него, например, в случае радиационного облучения. Сигнализация о нештатной ситуации подвижного объекта 4 может включаться и принудительно по управляющему сигналу, поступившему с диспетчерского пункта 3 через базовые станции 2. Это позволяет организовать канал управления с диспетчерского пункта 3 через базовые станции 2 к выбранному подвижному объекту 4. Мониторы могут быть выполнены по принципу носимого планшетного компьютера типа «iPad» [5], объединяющего в своем составе процессор, монитор, клавиатуру, средства радиосвязи с базовой станцией, сигнализации и формирования звуковых сигналов, аккумулятор.
Рассмотрим возможности технической реализации заявляемого способа на типовом (серийном) оборудовании.
Подвижные объекты 4 приступают к работе в рабочей зоне 1. Процессор 9 монитора подвижного объекта периодически и поочередно через коммутатор 7 подключает датчики 5 и 6 к аналого-цифровому преобразователю 8, считывает их показания и запоминает в виде сообщения - блока телеметрической информации. Схема монитора подвижного объекта 4 с датчиками приведена на фиг.2.
Датчики 5 состояния подвижного объекта предназначены для преобразования параметров состояния абонента в электрические сигналы. В качестве датчиков могут выступать термоэлектрические преобразователи (терморезисторы, термотранзисторы), приемники биоэлектрических сигналов и т.п., снабженные соответствующими усилительными и согласующими устройствами, а также соединительными проводами.
Датчики 6 состояния среды, окружающей ПО 4, предназначены для преобразования соответствующих параметров в электрические сигналы. В зависимости от задач мониторинга выбор параметров зависит от факторов риска рабочей зоны 1. Для измерения этих параметров состояния окружающей среды в качестве датчиков могут выступать термоэлектрические преобразователи (терморезисторы, термотранзисторы), фотоэлектрические преобразователи (фоторезисторы, фототранзисторы), газоанализаторы, дозиметры и т.п., снабженные соответствующими усилительными и согласующими устройствами, а также соединительными проводами.
Коммутатор 7 датчиков предназначен для последовательного опроса датчиков 5 и 6. Коммутатор имеет сигнальные входы по числу датчиков 5 и 6 и адресные входы от процессора 9 монитора подвижного объекта, по которым происходит выбор опрашиваемого датчика. Выход коммутатора датчиков 7 соединен с входом аналого-цифрового преобразователя 8.
Аналого-цифровой преобразователь 8 предназначен для преобразования сигналов с выходов датчиков 5 и 6 в цифровую форму и может быть реализован в виде соответствующего АЦП на серийной интегральной микросхеме.
Процессор 9 монитора подвижного объекта предназначен для обработки и хранения предельно допустимых параметров состояния подвижного объекта и окружающей среды, проведения операций: последовательного опроса датчиков 5 и 6, сравнения их показаний с предельно допустимыми, выработки сигнала нештатной ситуации, дешифрации адреса и содержания запросного сообщения, кодирования/де-кодирования данных, управления работой приемопередающей части монитора, формирования временных интервалов передачи/приема сообщений кадра, контроля работоспособности монитора и выработки соответствующей квитанции «по событию» (при появлении неисправности). Процессор 9 может быть выполнен в виде носимого планшетного компьютера типа «iPad» с соответствующим программным обеспечением. Все блоки, подключаются к процессору через порты ввода-вывода, которые представляют собой адресуемые регистры, управляемые процессором 9 с помощью стандартных процедур.
Передатчики 10 и 12 монитора подвижного объекта с антеннами предназначены для передачи радиосигналов с частотами несущих f1 и f2 от монитора подвижного объекта на базовые станции БС21 и БС22. В качестве передатчика может использоваться, например, передатчик частотно-модулированных сигналов.
Приемники 11 и 13 монитора подвижного объекта с антеннами предназначены для приема радиосигналов с частотами несущих f1 и f2 от соответствующих базовых станций БС21 и БС22. В качестве приемников может использоваться, например, приемник частотно-модулированных сигналов. Антенна у приемников может быть общая.
Сигнализатор нештатной ситуации 14 предназначен для выработки звукового сигнала автономно в случае превышения допустимых параметров состояния ПО или окружающей среды, а также по команде с диспетчерского пункта 3, поступившей в виде управляющего сигнала. Сигнализатор управляется от процессора 9 монитора подвижного объекта.
Канал 15 предназначен для ввода в процессор монитора исходных данных в заводских условиях или в процессе коррекции данных при подготовке к телемониторингу. В качестве таких данных выступают предельно допустимые параметры состояния подвижного объекта 4 и окружающей среды, адрес монитора или подвижного объекта и другие. Канал 15 может быть выполнен, например, в виде последовательного интерфейса связи ПЭВМ с процессором 9 монитора подвижного объекта.
Приемник 16 сигналов глобальных навигационных спутниковых систем с антенной подключен к входу процессора 9. С помощью высокоточных меток времени приемника 16 обеспечивают в процессоре 9 формирование всех слотов кадра, двух интервалов передачи и двух интервалов приема радиосигналов в каждом из кадров. Только в этих интервалах времени в каждом мониторе осуществляют соответственно передачу и прием радиосигналов. Кроме того, приемник служит для определения точного местоположения подвижного объекта в реальном масштабе времени. Приемник может быть реализован на серийном устройстве марки «Jupiter» или на основе технологии Assisted-GPS, используемой носимом планшетном компьютере типа «iPad» [6].
Дисплей 17 и клавиатура 22 монитора подвижного объекта предназначены для формирования запросных сообщений и адреса вызываемого абонента, а также для отображения принятых данных при визуальном съеме. Дисплей 17 и клавиатура 22 могут быть выполнены, например, на основе носимого планшетного компьютера типа «iPad».
Звуковоспроизводящая схема 34 может быть выполнена программно по принципу вокодера.
Схема базовой станции 2 приведена на фиг.3. С целью унификации базовые станции 2 могут быть выполнены по единой схеме, а их функции изменяться путем передачи с диспетчерского пункта 3 соответствующих сообщений.
Передатчики 18 и 19 базовой станции с антеннами предназначены для формирования и передачи радиосигналов от базовой станции к мониторам подвижных объектов 4 на несущих частотах f1 или f2 и на диспетчерский пункт 3 - на несущих частотах f3 или f4 в зависимости от номера базовой станции. В качестве передатчика может использоваться, например, передатчик частотно-модулированных сигналов.
Приемники 20 и 21 базовой станции с антеннами предназначены для приема радиосигналов от ДП 3 и мониторов 4 с несущими частотами f3 или f4 и f1 или f2 соответственно. В качестве приемника может использоваться, например, приемник частотно-модулированных сигналов. Антенны приемников в базовых станциях могут быть совмещены.
Процессор 23 базовой станции предназначен для выполнения операций: приема адресного и запросного сообщения, оценки их достоверности и дешифрации, приема телеметрической информации от мониторов, преобразования форматов передаваемых и принимаемых данных, а также для управления приемопередающей аппаратурой и контроля работоспособности базовой станции 2. Процессор 23 базовой станции может быть выполнен в виде ЭВМ, устанавливаемой на борту летательного аппарата, например ЭВМ «Багет-55» с соответствующим программным обеспечением. Все блоки подключаются к процессору 23 через порты ввода-вывода, которые представляют собой адресуемые регистры, управляемые им.
Канал 24 предназначен для ввода в базовую станцию (процессор 23) исходных данных для обеспечения взаимодействия с диспетчерским пунктом 3 и подвижными объектами 4. В качестве исходных данных могут выступать адрес базовой станции 2, режим ее работы и другие. Канал ввода данных 24 может быть выполнен, например, в виде последовательного интерфейса RS-232С.
Диспетчерский пункт 3 (фиг.4) предназначен для управления всей системой мониторинга, обработки и отображения информации. Диспетчерский пункт 3 может быть реализован в виде одного или нескольких рабочих мест, собранных, например, на персональных ЭВМ с соответствующим программным обеспечением, двумя передатчиками и двумя приемниками радиоканалов связи двух базовых станций.
Рассмотрим работу одного из вариантов устройства, реализующего заявляемый способ.
Перед началом мониторинга выбирают тип и количество датчиков 5 и 6 и подключают их к мониторам. Устанавливают мониторы на подвижных объектах 4. Если не хватает данных, введенных в заводских условиях, производят ввод дополнительных параметров в мониторы подвижных объектов 4, базовые станции 2 и диспетчерский пункт 3 через каналы 15, 24 и 33 соответственно, например, с помощью одного из мониторов подвижного объекта с заложенной предварительно в него программой. В базовых станциях с помощью процессора 23 переводят средства радиосвязи (первый и второй передатчики 18,19, первый и второй приемники 20, 21) в рабочее состояние, формируют две временных шкалы кадров обмена данными с разнесенными во времени маркерами и на несущих частотах f1 и f2 излучают маркеры. Для обмена данными с ДП и обеспечения требований электромагнитной совместимости на базовых станциях 2 подключают средства радиосвязи 18 и 21 с несущими частотами f3 для БС 21 и f4 - для БС 22.
На мониторах подвижных объектов 4 с датчиками состояния ПО и окружающей среды 5 и 6, выбранными исходя из факторов риска рабочей зоны 1, принимаются маркеры на несущих частотах f1 и f2. Затем во всех мониторах ПО формируют сообщения об их местоположении и с определенных заранее датчиков состояния 5 и 6 и в соответствующих интервалах передачи слота, выделенного для данного ПО, в двух временных шкалах на несущих частотах f1 и f2 излучают радиосигналы. На базовых станциях 2 на несущих частотах f1 или f2 соответственно в определенных заранее интервалах времени принимают радиосигналы, декодируют их, проверяют достоверность, по номеру слота, адресной части и приоритетности сообщения определяют маршрут дальнейшей передачи: на другой монитор ПО 4 или на ДП 3. При получении первых сообщений с датчиков состояния 5 и 6 подвижных объектов 4 и анализа их на ДП 3 осуществляют ориентированный запрос данных с датчиков 5 и 6 тех ПО 4, которые находятся в наиболее напряженной обстановке, посылая им через базовые станции 2 соответствующие запросы.
Приемники 21 двух базовых станций 2 преобразуют эти радиосигналы в видеосигналы, которые обрабатывают далее в процессорах 23 для определения их достоверности. С помощью тех же процессоров 23 формируют на каждой из двух БС две временные шкалы кадров обмена данными с разнесенными во времени интервалами передачи данных. В случае приема с ДП 3 достоверных данных на их основе формируют сообщение в соответствующем интервале передачи и на несущих частотах f1 или f2 (в зависимости от номера базовой станции БС 21 или БС 22) излучают радиосигналы в эфир.
Первый и второй приемники 11 13 мониторов подвижных объектов 4 преобразуют эти радиосигналы в видеосигналы, которые обрабатываются далее в процессорах 9 для определения их достоверности и проведения дальнейших операций. При совпадении поступившего адреса с собственным адресом монитора подвижного объекта 4 его процессор 9 выбирает из двух принятых сообщений наиболее достоверное и дешифрирует его (или управляющий сигнал с ДП 3). Если поступившее сообщение оказывается формализованной посылкой, представляющей в цифровой форме стандартную (для данной ситуации) фразу, то с помощью звуковоспроизводящей схемы 34 восстанавливается запросное сообщение выбранному подвижному объекту, набранное с помощью клавиатуры 32 из «Меню» на экране дисплея 31 диспетчерского пункта 3. В ответ на запрос с помощью процессора 9, коммутатора 7 и АЦП 8 ПО снимают показания соответствующего датчика состояния 5 или 6, формируют требуемое сообщение и во временной интервал передачи, характерный для выбранного ПО, излучают первым и вторым передатчиками 10 и 12 ПО 4 радиосигналы на частотах f1 и f2. На базовых станциях 2 эти радиосигналы принимают приемниками 20. Далее в процессорах 23 БС2 определяют достоверность сообщения и в случае правильного приема формируют сообщение для передачи через передатчики 18 с антеннами на ДП 3 на частотах f3 с БС 21 и f4 с БС 22. На диспетчерском пункте приемниками 28 и 29 с антеннами принимают эти радиосигналы и затем обрабатывают в процессоре 25 ДП 3. При большом числе ПО 4 или сложной ситуации в рабочей зоне 1 количество рабочих мест, состоящих из процессора 25, клавиатуры 32, дисплея 31 и звуковоспроизводящей схемы 34, на диспетчерском пункте 3 может быть увеличено с помощью канала входа/выхода 35, построенного, например, по протоколу «Ethernet». Процессор 25 ДП 3 выбирает из двух принятых сообщений наиболее достоверное, дешифрирует его и выводит его на экран дисплея 31 ДП 3 для визуального съема или на звуковоспроизводящую схему 34 (при наборе с помощью клавиатуры 22 на дисплее 17 монитора ПО 4 формализованного запросного сообщения на диспетчерский пункт 3). При необходимости на дисплее 31 ДП 3 отображают номер выбранного монитора ПО 4, его координаты, а также телеметрическую информацию. Поступившие в диспетчерский пункт 3 показания датчиков состояния 5 и 6 сравнивают с предельно допустимыми. По результатам сравнения принимаются соответствующие меры. Если оба принятых сообщения недостоверны, то с ДП 3 повторяют запрос.
Кроме частотного доступа в направления «БС21-ДП» и «БС22-ДП» организуют и временной доступ в радиосеть, например, 90% времени с помощью процессоров 23 БС и 25 ДП выделяют для передачи данных с базовых станций 2 на ДП 3, а 10% - в обратном направлении. Синхронизация этого процесса обеспечивается с помощью высокостабильных меток времени с выхода приемника 16 сигналов глобальных навигационных спутниковых систем. Периодически на диспетчерский пункт 3 с мониторов ПО 4 в отведенных для них слотах передают записанные в процессорах 9 ПО 4 наиболее важные сообщения с датчиков ПО 4 через первый и второй передатчики 10 и 12 с антеннами.
Преимущества заявляемого способа комплексного телемониторинга подвижных
1. Комплексный автоматический телемониторинг подвижных объектов с определением их точного местоположения, параметров окружающей среды и состояния самого подвижного объекта независимо от рельефа местности с помощью высокоподнятых на летательных несущих платформах двух базовых станций.
2. Оперативное решение задач телемониторинга с быстрым развертыванием базовых станций и коррекцией их маршрута полета, изменением типа, количества и местоположения датчиков состояния окружающей среды и подвижного объекта, с учетом возможности быстрого увеличения контролируемых параметров состояния подвижного объекта в ходе мониторинга.
3. Автономное функционирование мониторов с информированием подвижного объекта о возникновении нештатной ситуации и организации связи между подвижными объектами по принципу «каждый с каждым».
4. Возможность решения задач мониторинга местности в условиях неопределенности, а также оказания оперативной помощи подвижным объектам в нештатных ситуациях.
5. Сравнительно низкая стоимость технической реализации способа с помощью известных аппаратных решений благодаря унификации оборудования диспетчерского пункта, базовых станций и мониторов.
На момент подачи заявки разработаны алгоритмы функционирования, а также часть программного обеспечения заявляемого способа.
Источники информации
1. Патент РФ №2157565, М.кл. G08G 1/123, G08G 1/127, G08G 1/01, Н04В 7/26, 2000.
2. Патент РФ №2106694, М.кл. G08B 25/00, 1998.
3. Патент РФ №2216047, М.кл. G08B 26/30, 2003 (прототип).
4. Б.И.Кузьмин «Сети и системы цифровой электросвязи», часть 1 «Концепция ИКАО CNS/ATM. Москва - Санкт-Петербург: - ОАО «НИИЭР», 1999. - 206 с.
5. file://http://images.yandex.ru/yandsearch? Ipad 3g img_url=filearchive.cnews.ru.
6. file://localhost/G:/DeepApple·Вся правда о GPS в планшетнике iPad.mht.
Способ комплексного телемониторинга подвижных объектов, заключающийся в том, что на все подвижные объекты устанавливают мониторы и подготавливают две базовые станции радионаблюдения с индивидуальными адресами, а также диспетчерский пункт, который соединяют каналом связи с одной базовой станцией, формируют сигналы на двух базовых станциях, и передают по радиоканалу в диспетчерский пункт, перед началом телемониторинга устанавливают базовые станции, диспетчерский пункт и мониторы, исходя из соответствующих факторов риска, выбирают тип датчиков состояния подвижного объекта и окружающей среды, устанавливают их на подвижные объекты и подключают к соответствующим мониторам, вводят в мониторы индивидуальные предельно допустимые параметры состояния подвижного объекта и окружающей среды, внешними средствами определяют координаты двух базовых станций на местности, в ходе телемониторинга при изменении количества и положения базовых станций координаты базовых станций отображают в диспетчерском пункте, периодически принимают в мониторы сигналы от датчиков состояния подвижного объекта и окружающей среды, запоминают их показания в виде сообщения - блока телеметрической информации - сравнивают с предельно допустимыми, при превышении или при поступлении соответствующего управляющего сигнала с диспетчерского пункта включают сигнал нештатной ситуации, поочередно выбирают мониторы и отображают их координаты в диспетчерском пункте, блок телеметрической информации выбранного монитора передают через базовую станцию в диспетчерский пункт, где его принимают, оценивают состояние выбранного подвижного объекта, отображают состояние подвижного объекта, при возникновении нештатной ситуации увеличивают частоту опроса соответствующего монитора, а также принимают меры для помощи подвижному объекту, отличающийся тем, что обе базовые станции устанавливают на летательные несущие платформы и перед началом телемониторинга их поднимают в воздух, в диспетчерском пункте, на мониторах подвижных объектов и базовых станциях после включения оборудования осуществляют взаимную синхронизацию всех объектов, участвующих в телемониторинге, обеспечивают единую адресацию, известную всем участникам телемониторинга, и устанавливают на них приемники сигналов глобальных навигационных спутниковых систем, данные которых используют для определения местоположения объектов и формирования на них шкалы единого точного времени, определяют для каждого подвижного объекта конкретный монитор, при расширении рабочей зоны увеличивают высоту подъема летательных несущих платформ, с помощью шкалы единого точного времени на базовых станциях формируют на разных частотах маркеры в разнесенные интервалы времени и выделяют слоты для приема/передачи данных с каждого на каждый мониторы подвижного объекта, по маркеру на мониторе подвижного объекта определяют время передачи данных на соответствующую базовую станцию - соседний монитор - или приема сообщений с нее или соседнего монитора, местоположение диспетчерского пункта, базовых станций, вызываемого подвижного объекта, в диспетчерском пункте по принятым с подвижного объекта сообщениям о его местоположении и параметрам движения отображают его местонахождение на карте местности, строят экстраполированную траекторию движения, оценивают возможность попадания выбранного подвижного объекта в опасный район, выдают через базовые станции рекомендации по преодолению нештатной ситуации, диспетчерский пункт соединяют каналом связи со второй базовой станцией, поочередно или в связи с обострившейся ситуацией с диспетчерского пункта выбирают подвижный объект и в заданный интервал времени через базовые станции организуют обмен данными с соответствующим монитором выбранного подвижного объекта, обеспечивают обмен данными между подвижными объектами как по принципу «каждый с каждым», так и через базовые станции, контролируют достоверность этого обмена на базовых станциях, а результаты контроля передают на диспетчерский пункт, для двунаправленной трансляции кодограмм по цепи «базовые станции - диспетчерский пункт» используют две частоты, для каждой базовой станции своя, а для разделения направлений обмена информацией по цепи «базовые станции - диспетчерский пункт» - временной доступ в радиосеть, формализуют фразы, необходимые для работы подвижным объектам, переводят их в цифровые сообщения, записывают в память вычислительных средств мониторов и диспетчерского пункта, при необходимости нужное сообщение выводят из памяти вычислительных средств мониторов или диспетчерского пункта и с признаком выбранного подвижного объекта после преобразования в радиосигнал на двух частотах излучают в эфир, в базовых станциях после оценки правильности приема сообщений осуществляют преобразование формата данных, принятых на диспетчерском пункте, в формат данных, необходимый для организации радиосети «базовые станции - подвижные объекты», или выполнение обратной процедуры, формирование двух соответствующих радиосигналов и излучение в эфир, при приеме радиосигналов монитором или на диспетчерском пункте и преобразовании их в видеосигналы выбирают из двух принятых сообщений наиболее достоверное, дешифрируют его и при совпадении принятого адреса с адресом подвижного объекта выводят информацию на соответствующий экран для визуального съема или при посылке формализованного речевого сообщения - для звукового воспроизведения.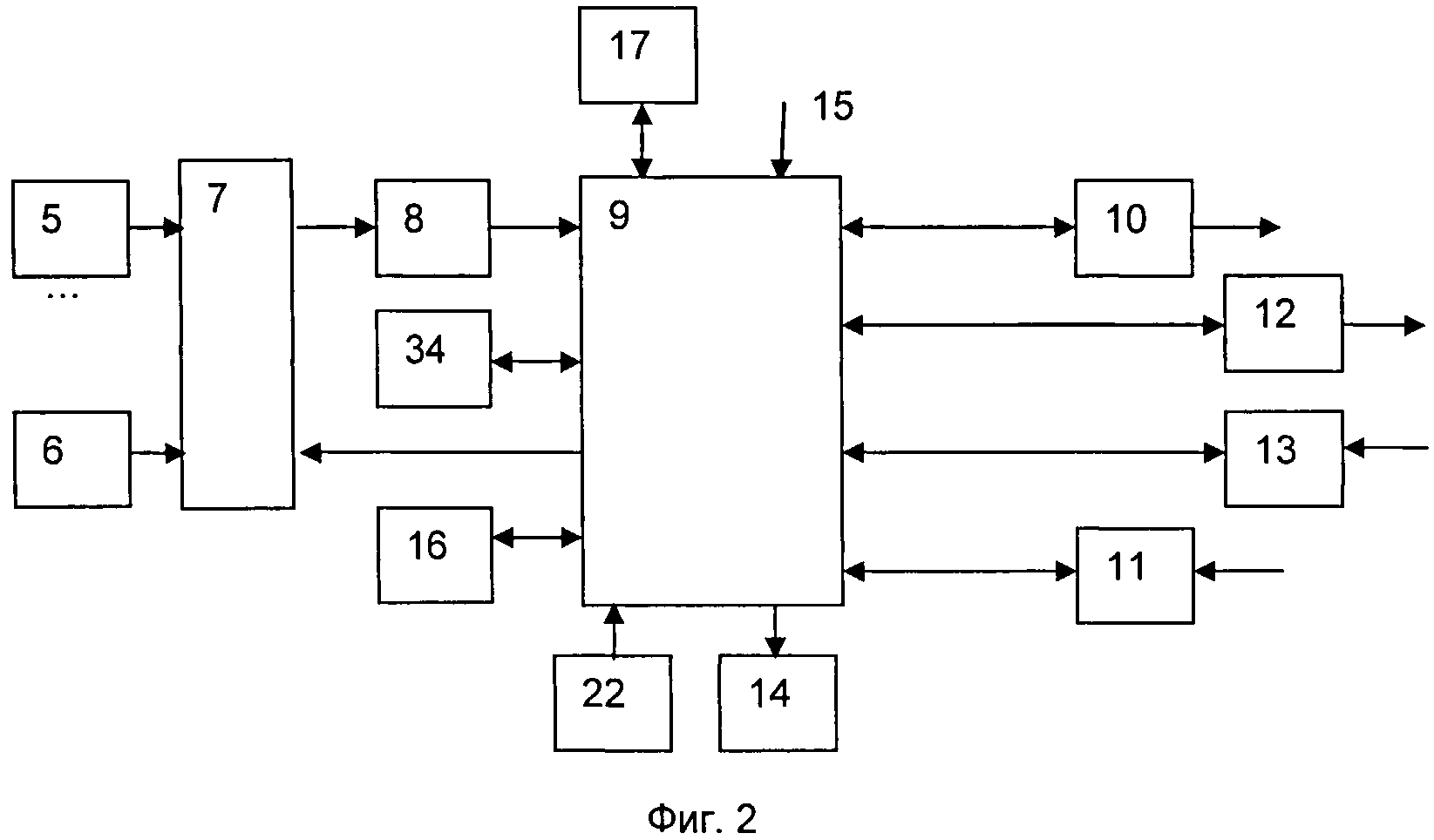
Способ каталитического гидрирования тетрахлорида кремния
Подвижный комплекс средств связи
Система передачи электрической энергии
Способ обработки горячекатаного проката
Система радиосвязи с воздушными объектами
Смесь для изготовления литейных форм и стержней
Маркер - субгармонический параметрический рассеиватель
Устройство для испытаний электронных компонентов в полосковом тракте
Способ обнаружения объектов, содержащих нелинейные элементы
Силовой агрегат транспортного средства (варианты)
Способ получения хлоридов 2,3-дигидро[1,3] селеназоло[3,2-α]пиримидиния
Способ каталитического гидрирования тетрахлорида кремния
Подвижный комплекс средств связи
Система передачи электрической энергии
Способ обработки горячекатаного проката
Система радиосвязи с воздушными объектами
Способ вакуумно-плазменного осаждения покрытия на режущую пластину из твердосплавного материала
Смесь для изготовления литейных форм и стержней
Маркер - субгармонический параметрический рассеиватель
Устройство для испытаний электронных компонентов в полосковом тракте

