Результат интеллектуальной деятельности: СПОСОБ КОРРЕКЦИИ ЛИНЕЙНЫХ И УГЛОВЫХ КООРДИНАТ ШЛЕМА ОПЕРАТОРА ЛЕТАТЕЛЬНОГО АППАРАТА И УЛЬТРАЗВУКОВАЯ НАШЛЕМНАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ
Вид РИД
Изобретение
Заявляемое изобретение относится к технике акустических нашлемных систем позиционирования и может быть применено в устройствах, где используются данные о трех координатах положения и трех углах ориентации головы оператора, преимущественно в нашлемных системах целеуказания и индикации летательных аппаратов, в системе управления прожектором вертолета, в авиа- и автотренажерах, в системах виртуальной реальности.
Наиболее близким к заявляемому изобретению по технической сущности является способ компенсации погрешностей измерения координат, примененный в патенте (см. RU №2357184, F41G 3/22, 27.05.2009) и в патенте (см. RU №2449242, G01B 04/27, 27.04. 2012, «Ультразвуковая нашлемная система позиционирования», принятом за прототип.
В прототипе используется дальномерный метод определения координат ультразвуковых приемников, размещенных на шлеме оператора, благодаря измерению расстояний между базовыми ультразвуковыми излучателями, размещенными в кабине летательного аппарата (ЛА) с известными координатами в связанной с ЛА системой координат, и ультразвуковыми приемниками, размещенными на шлеме. Для решения навигационной задачи определения координат нашлемных приемников в прототипе измеряют расстояния от каждого излучателя в кабине ЛА до каждого нашлемного приемника и до приемника корректирующего канала.
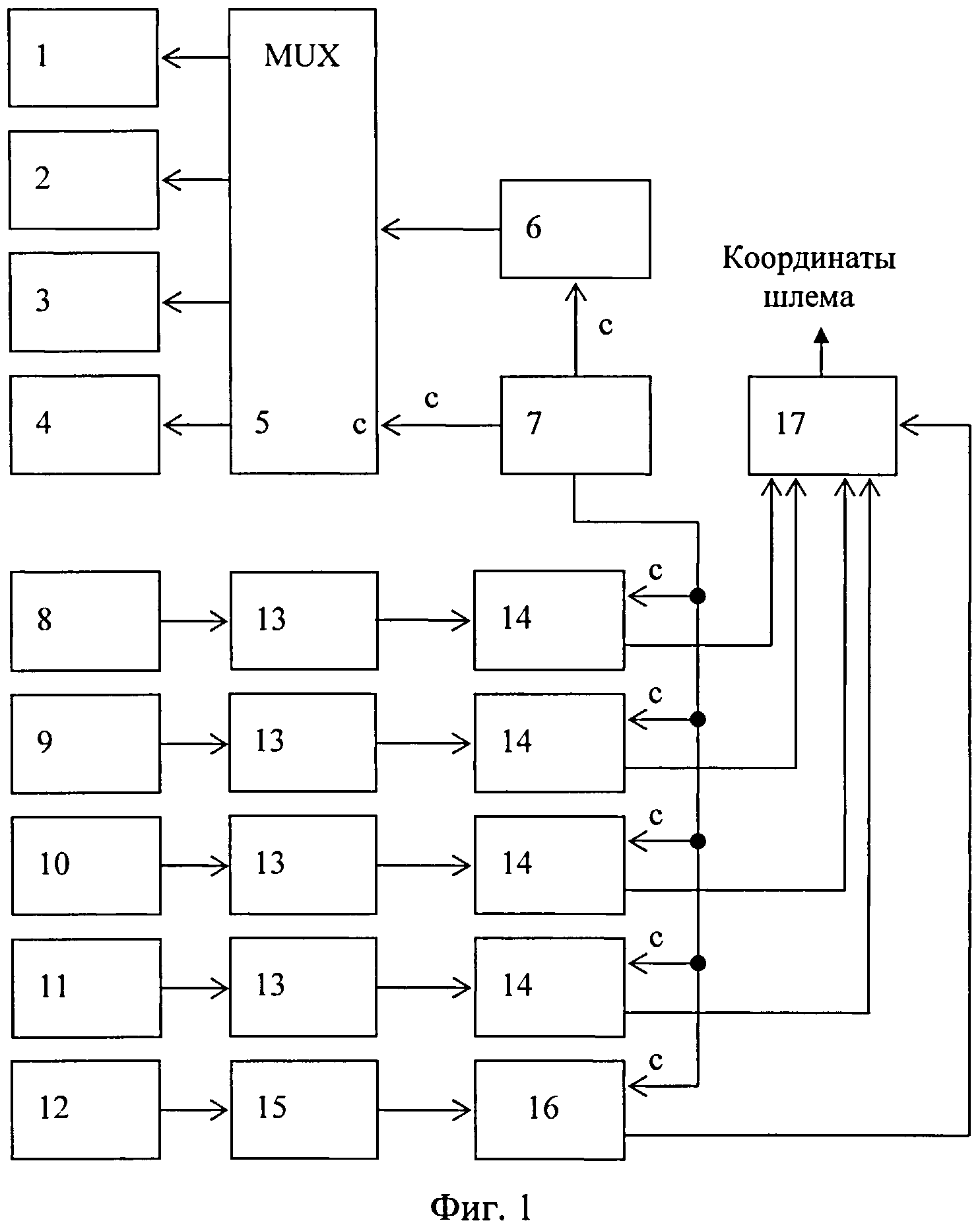
Работа прототипа ультразвуковой нашлемной системы позиционирования (УЗНСП) поясняется структурной схемой, приведенной на фиг. 1, где обозначены:
1, 2, 3, 4 - ультразвуковые излучатели;
5 - мультиплексор;
6 - формирователь сигнала;
7 - синхронизатор;
8, 9, 10, 11 - ультразвуковые нашлемные приемники;
12 - ультразвуковой приемник корректирующего канала;
13 - усилитель сигналов нашлемных приемников с АРУ;
14 - измеритель времени задержки сигналов нашлемных приемников;
15 - усилитель сигналов корректирующего канала;
16 - измеритель времени задержки сигналов корректирующего канала;
17 - бортовой вычислитель.
Каналы, содержащие измерители 14, будем называть измерительными, а канал, содержащий измеритель 16, корректирующим.
Ультразвуковые излучатели 1-4 размещены в кабине над шлемом пилота в разнесенных точках с известными координатами в связанной системе координат, нашлемные ультразвуковые приемники 8-11 размещены крестообразно в реперных точках, ультразвуковой приемник 12 корректирующего канала жестко закреплен в непосредственной близости от шлема пилота с известными расстояниями r[i] до каждого i-го излучателя. Ультразвуковые излучатели 1…4, возбуждаемые формирователем сигналов 6 через мультиплексор 5, поочередно излучают ультразвуковые сигналы каждый в течение интервала ТП, определяемым синхронизатором 7. Это дает возможность идентифицировать номер излучателя, сигналы которого принимаются всеми приемниками на данном интервале времени.
Для решения навигационной задачи - определения координат нашлемных приемников - в каждый интервал времени ТП измеряют задержки распространения ультразвуковых волн (УЗВ) от активного в этом периоде излучателя до всех нашлемных приемников 8…11 и приемника корректирующего канала 12.
Система работает следующим образом. Синхронизатор 7 выдает синхроимпульсы в виде двухразрядного числа с периодом повторения ТП, которое циклически меняется от периода к периоду, пробегая значения 00, 01, 10, 11. Формирователь сигналов 6 генерирует фазоманипулированные сигналы вида (+-) или (-+) в зависимости от четности поступающего на него синхросигнала. Эти же синхросигналы переключают мультиплексор 5. В результате ультразвуковые излучатели 1, 2, 3 и 4 излучают сигналы поочередно, со сдвигом ТП и соответствующим чередованием фаз, а нашлемные приемники 8…11 и приемник корректирующего канала 12 в течение интервала наблюдения принимают сигнал активного излучателя.
В прототипе используется способ компенсации возможного изменения скорости распространения УЗВ при изменении температуры, давления или наличия воздушных потоков в кабине ЛА и изменения координат излучателей в кабине, вызванных вибрацией стенок кабины ЛА, состоящий в том, что время пробега УЗВ от излучателя до нашлемного приемника корректируется с помощью дополнительного корректирующего канала, который измеряет времена пробега УЗВ TKK[i] от каждого i-го излучателя до неподвижно закрепленного в кабине ЛА приемника корректирующего канала (ПРМКК), расположенного вблизи шлема оператора. Расстояния r[i] между i-м излучателем и ПРМКК известны в процессе монтажа системы или могут быть измерены ультразвуковым методом в любое время.
Ниже приводится описание способа компенсации погрешностей измерения координат объекта, принятый в прототипе.
Расстояние R[i.j] между j-м приемником и i-м излучателем находится как произведение времени пробега УЗВ T[i,j] между ними на скорость УЗВ. Скорость УЗВ νi определяется из измерений в корректирующем канале для каждого излучателя:
νi=r[i]/TKK[i].
Далее по данным о временных задержках в корректирующем и измерительных каналах рассчитываются расстояния от каждого нашлемного приемника до каждого излучателя по формуле:
R[i,j]=T[i,j]r[i]/TKK[i].
Очевидно, последнее выражение учитывает изменения скорости УЗВ, связанные с температурой, давлением, так как TKK[i] несет в себе информацию о скорости УЗВ с учетом радиальной скорости воздушных потоков в кабине ЛА. Расположение приемника корректирующего канала ПРМКК в непосредственной близости от шлема оператора дает возможность компенсировать влияние вибраций на точность измерений, так как времена T[i,j] и TKK[i] при вибрации изменяются синхронно и пропорционально.
Расчет координат нашлемных приемников, а по ним линейных и угловых координат шлема производится в бортовом вычислителе 17.
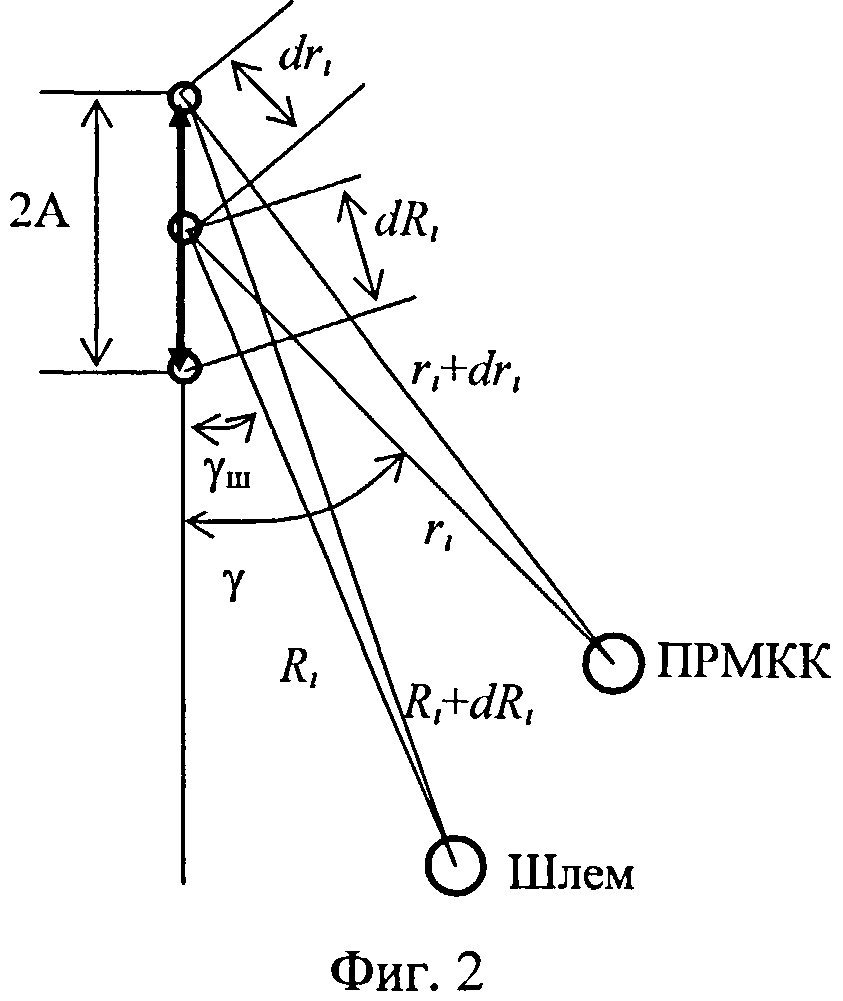
Приведем подробное описание способа коррекции вибрации излучателей, принятого в прототипе. Описание поясняется фиг. 2, где обозначено:
А - амплитуда вибраций излучателя;
Ri - расстояние от шлема до i-го неподвижного излучателя;
r1 - расстояние от ПРМКК до i-го неподвижного излучателя;
dri - приращение расстояния ri за счет вибрации;
dri - приращение расстояния Ri за счет вибрации;
γш - угол между направлением вибрации и направлением на шлем;
γ - угол между направлением вибрации и направлением на ПРМКК.
Запишем приращения измеряемых расстояний с учетом A<<ri,Ri как:
dri≈A·cosγ=dRi(cosγ/cosγш)
dRi≈A·cosγш=dri·(cosγш/cosγ)
При обработке принятых сигналов в бортовом вычислителе 17 вычисляются расстояния R[i,j] между ИЗЛ и ПРМ как R[i,j]=T[i,j]·νi, где: νi=(ri+dri)/TKK[i] - скорость УЗВ, измеренная в корректирующем канале, TKK[i] - время распространения УЗВ в корректирующем канале, T[i,j] - время распространения УЗВ в измерительном канале. Здесь i - номер излучателя, j - номер нашлемного приемника.
Таким образом, задержка сигналов в измерительных каналах 14 определяется как:
T[i,j]=TKK[i](Ri+dRi)/(ri+dri)=TKK[i](Ri/ri)(1+dRi/Ri)/(1+dri/ri)≈TKK[i](Ri/ri), т.к. разумно считать (1+dRi/Ri)/(1+dri/ri)≈1.
Последнее равенство выполняется точно при условии:
Связь истинного расстояния с измеренными временами распространения УЗВ дается выражением:

или, после небольших преобразований:

Первое слагаемое в (1), (2) не зависит от наличия вибрации, остальные описывают ее влияние. Хорошо видно ослабление влияния вибрации на точность определения Ri за счет ее компенсации в корректирующем канале. Одновременно (2) показывает, что компенсация вибрации будет полной при выполнении условия γ≈γш. В то же время Ri определяется отношением времени пролета УЗВ в измерительном канале к времени пролета в корректирующем канале. Поскольку условия распространения УЗВ в обоих каналах одинаковы, тем самым исключаются влияние внешних условий на точность определения Ri.
Однако для полной компенсации влияния вибрации и движения воздуха в кабине необходимо, чтобы приемник корректирующего канала ПРМКК располагался в центре шлема оператора, при котором выполняется условие γ≈γш, что, конечно, невозможно. Поэтому указанная компенсация осуществляется не полностью, а лишь частично. Это является недостатком прототипа.
В патенте (см. RU 2357184, F41G 3/22, 27.05.2009, «Способ определения линейных и угловых координат шлема оператора в кабине летательного аппарата и ультразвуковая нашлемная система для его осуществления») отмечена возможность использования двух приемников корректирующего канала, расположенных симметрично относительно шлема, так что их виртуальный фазовый центр совпадает с центром шлема. Однако движение головы пилота нарушает условие симметрии приемников относительно шлема, что является недостатком предложенного в этом патенте решения.
Задачей настоящего изобретения является увеличение степени компенсации вибраций, нестабильности скорости звука и движения воздуха в кабине ЛА.
Технический результат заключается в повышении точности определения координат шлема оператора в условиях вибрации и изменяющихся внешних условиях.
Поставленная задача с достижением упомянутого выше результата решается тем, что в способе определения линейных и угловых координат шлема оператора в кабине летательного аппарата по координатам размещенных на шлеме ультразвуковых приемников, в кабине ЛА размещают не менее трех ультразвуковых излучателей с известными координатами в связанной с ЛА системе координат, при этом на краях рабочей зоны возможных положений шлема противоположно в поперечном и продольном направлениях размещают четыре ультразвуковых приемника корректирующих каналов с известными расстояниями до каждого ультразвукового излучателя, осуществляют излучение и прием импульсных ультразвуковых сигналов, измеряют время задержки сигналов от каждого ультразвукового излучателя до каждого нашлемного ультразвукового приемника и до каждого ультразвукового приемника корректирующих каналов, рассчитывают координаты шлема с использованием скорости звука, измеренной в одном любом корректирующем канале, находят направление, ближайшее к направлению на шлем из направлений от излучателя к корректирующим приемникам и к центру рабочей зоны положений шлема и рассчитывают расстояния от каждого нашлемного ультразвукового приемника до каждого ультразвукового излучателя с учетом скорости звука в найденном направлении, по которым определяют координаты шлема оператора.
Описание устройства для осуществления способа приведем для случая четырех излучателей, размещенных в кабине летательного аппарата и четырех нашлемных приемников.
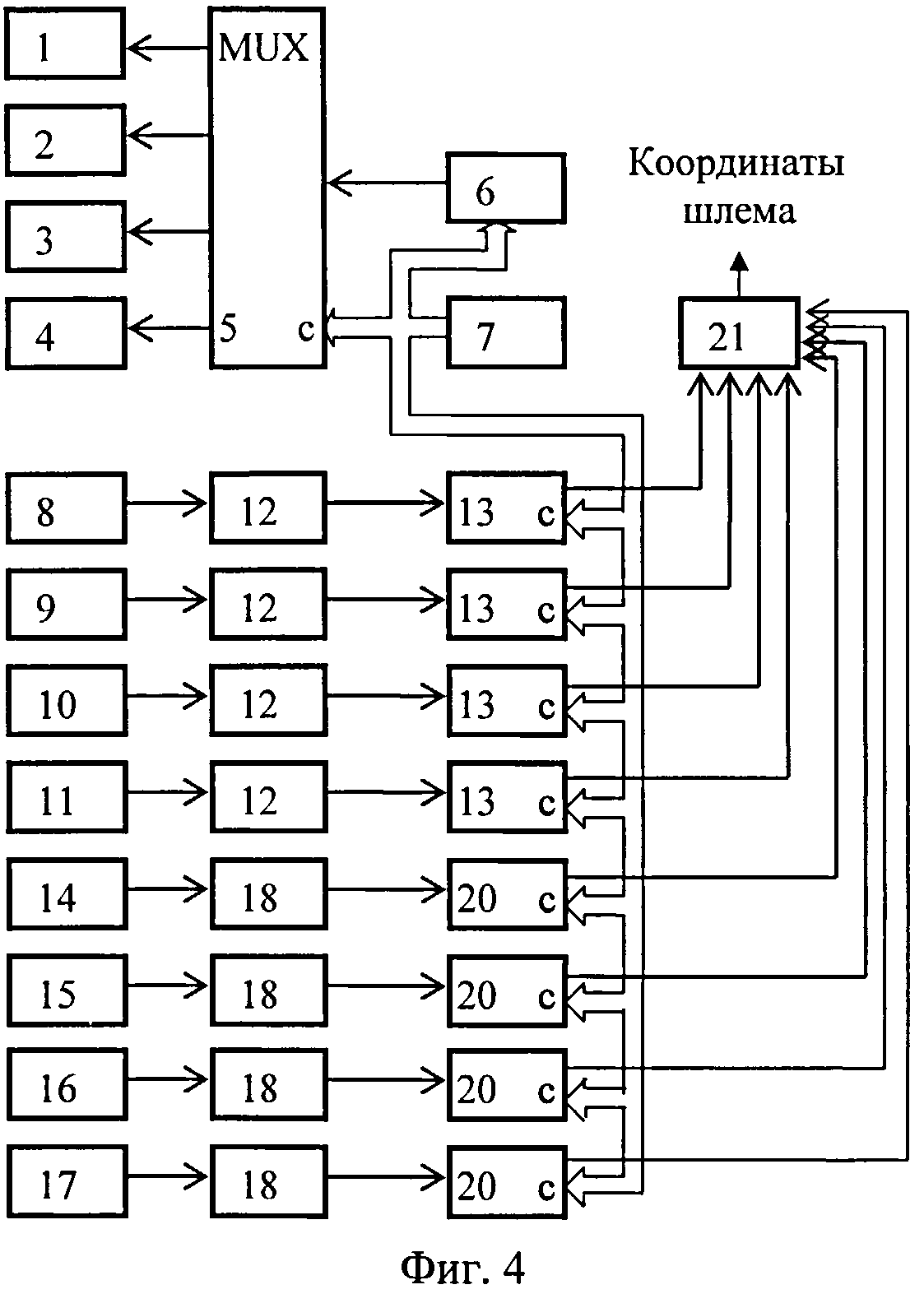
Поставленная задача в системе достигается тем, что ультразвуковая нашлемная система позиционирования, включающая вычислитель и содержащая четыре ультразвуковых излучателя, размещенных в кабине над шлемом оператора в разнесенных точках с известными координатами в связанной с кабиной системе координат, четыре нашлемных ультразвуковых приемника, размещенных в реперных точках, четыре корректирующих канала с четырьмя ультразвуковыми приемниками, размещенными противоположно на краях рабочей зоны положений шлема пилота с известными расстояниями до каждого ультразвукового излучателя, мультиплексор, формирователь сигналов, синхронизатор, четыре усилителя сигналов нашлемных приемников с АРУ, четыре измерителя времени задержки сигналов нашлемных приемников, четыре усилителя сигналов корректирующих каналов и четыре измерителя времени задержки сигналов корректирующих каналов, при этом выход синхронизатора соединен с входами синхронизации: мультиплексора, всех измерителей времени задержки сигналов нашлемных приемников, измерителя времени задержки сигналов корректирующего канала, формирователя сигналов, выход которого соединен с сигнальным входом мультиплексора, раздельные выходы которого соединены с ультразвуковыми излучателями, выходы нашлемных ультразвуковых приемников соединены через усилители сигналов нашлемных приемников с АРУ с сигнальными входами измерителей времени задержки сигналов нашлемных приемников, выходы которых соединены с входами информационных данных вычислителя, выходы ультразвуковых приемников корректирующих каналов соединены через усилители сигналов корректирующего канала с сигнальными входами измерителей времени задержки сигналов корректирующих каналов, выходы которых соединены с входом данных вычислителя, выход которого является выходом устройства (фиг. 4).
Изобретение иллюстрируется чертежами, на которых изображено:
на фиг. 1 - структурная электрическая схема прототипа;
на фиг. 2 - рисунок, поясняющий способ коррекции погрешностей в прототипе;
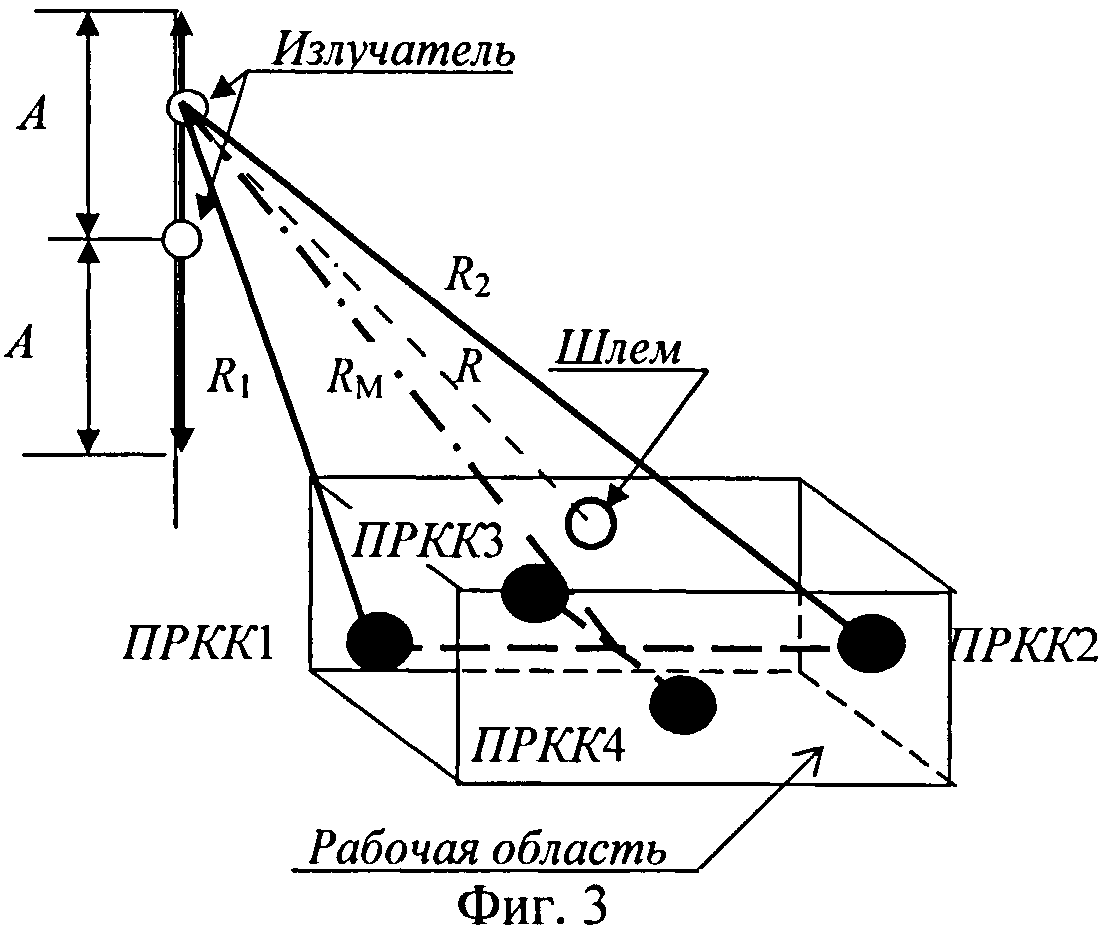
на фиг. 3 - рисунок, поясняющий способ коррекции погрешностей в заявляемой системе;
на фиг. 4 - структурная электрическая схема заявляемой системы.
Заявляемый способ коррекции погрешностей измерения координат шлема оператора иллюстрируется рисунком фиг. 3, на котором обозначено:
А - амплитуда вибрации излучателя;
R1 - текущее расстояние от излучателя до ПРКК1;
R2 - текущее расстояние от излучателя до ПРКК2;
RM - текущее расстояние от излучателя до середины соединяющей ПРКК1 и ПРКК2 линии (на рисунке - медиана треугольника);
R - текущее расстояние от излучателя до шлема;
ПРККХ, ПРКК2, ПРКК3, ПРКК4 - ультразвуковые приемники корректирующих каналов. Чтобы не загромождать рисунок, линии расстояний R3, R4 от излучателя до приемников ПРКК3, ПРКК4 не показаны.
Обозначим через T[i,j] время задержки сигнала от i-го излучателя до j-го нашлемного приемника, а через R[i,j] - соответствующее задержке расстояние.
Скорость звука в корректирующих каналах определяется соотношением  , ãäå i=1,2,3,4, TKKi - время задержки в i-м корректирующем канале.
, ãäå i=1,2,3,4, TKKi - время задержки в i-м корректирующем канале.
Длина медианы (расстояние от излучателя до центра рабочей зоны положений шлема) RM рассчитывается по известной формуле:
где с - расстояние между ПРКК1 и ПРКК2.
Время распространения ультразвуковой волны вдоль медианы рассчитывается как

где TKK1, TKK2 - времена задержки сигналов в ПРККХ и ПРКК2, ТКС - время распространения УЗВ от ПРККХ до ПРКК1.
Скорость звука вдоль медианы определяется как vM=RM/TKKM.
Последовательность действий заявляемого способа коррекции:
- Измеряют координаты шлема, используя для измерения скорости УЗВ νнач любой корректирующий канал. При этом, например, νнач=R1/TKK1, где TKK1 - время задержки в первом корректирующем канале.
- Определяют направление от каждого излучателя на шлем.
- Для каждого излучателя сравнивают направление на шлем с направлениями на корректирующие приемники и направлением медианы и выбирают ближайшее к направлению на шлем.
- Заново рассчитывают расстояния от каждого излучателя до каждого нашлемного приемника с использованием скорости звука в выбранном направлении, по которым определяют скорректированные координаты шлема.
Скорректированные расстояния теперь определяются как  , если выбрано направление на корректирующие приемники, и
, если выбрано направление на корректирующие приемники, и  , если выбрано направление вдоль медианы.
, если выбрано направление вдоль медианы.
Эффект коррекции достигается тем, что все расстояния (R, R1, R2, RM фиг. 3) под влиянием вибрации и изменения внешних условий меняются синхронно и пропорционально, а коррекция осуществляется в каждом периоде излучения с параметрами, определяемыми выбранным направлением.
Конструкция электродов для снятия электрокардиограммы
Способ исследования транспортной функции маточных труб
Способ герниопластики при вентральных грыжах
Дифференциальный датчик постоянного магнитного поля
Способ лечения пациентов с заболеваниями пульпы зуба и периодонта
Способ исследования скорости всасывания аминокислот в пищеварительном тракте
Термоанемометр и способ нагрева его терморезисторной структуры
Способ исследования всасывания аминокислот в пищеварительном тракте
Способ дифференциальной диагностики кардиогенной ишемии миокарда и энтерально-кардиального тормозного рефлекса
Способ дифференциальной диагностики кардиогенной ишемии миокарда и аноректально-кардиального тормозного рефлекса
Термозапорный клапан
Оптический криостат
Способ визуально-оптического контроля лазерного сканирования атмосферы
Способ одномоментной мастэктомии и реконструкции молочной железы собственными тканями
Способ изготовления скульптурно-дизайнерских изделий
Способ создания трехмерного дизайн-проекта краевого пародонта
Способ выращивания цыплят-бройлеров
Способ измерения постоянного магнитного поля
Способ диагностики проходимости маточных труб при бесплодии
Конструкция электродов для снятия электрокардиограммы

