Результат интеллектуальной деятельности: СПОСОБ РАДИОЛОКАЦИОННОГО ЗОНДИРОВАНИЯ ПРОСТРАНСТВА
Вид РИД
Изобретение
Изобретение относится к радиотехнике, преимущественно к радиолокации, в частности может быть использовано для зондирования квазимонохроматическими и дискретно-частотными сигналами стационарных, линейно рассеивающих электромагнитные волны объектов.
Известен способ зондирования пространства когерентными сигналами, одновременно излучаемыми N элементами передающей решетки элементами для обеспечения когерентного их сложения в различных точках зондируемого пространства. Он реализован, в частности, в радиолокационных системах (РЛС) с передающими фазированными антенными решетками (ФАР) (см., например, Активные фазированные антенные решетки./Под ред. Д.И. Воскресенского, А.И. Канащенкова, М.: «Радиотехника», 2004 г.; Д.И. Воскресенский. Антенны с обработкой сигнала. Сайнс-Пресс, 2002 г.; Синани А.И., Алексеев О.С., Винярский В.Ф. Антенны, вып. 2 (93), 2005, с. 64-68).
В указанных способах осуществляется зондирование пространства одновременно излученными когерентными сигналами с требуемыми амплитудой и фазой, излучаемыми N элементами передающей решетки и прием отраженных сигналов.
Основным недостатком указанных аналогов является низкая скрытность при осуществлении зондирования пространства и объектов противоборствующей стороны, которая необходима при обнаружении, распознавании и т.д., в первую очередь, объектов военного назначения в условиях информационного конфликта. Это связано с тем, что при его осуществлении на объекте зондирования за счет когерентного сложения одновременно излучаемых сигналов формируется высокая плотность потока мощности облучения, что делает работу РЛС весьма заметной. Так, при равенстве амплитуд сигналов результирующая плотность потока мощности облучения (А2) N элементами в точке их когерентного сложения в N2 больше плотности потока мощности облучения (а2), приходящего от отдельного N элемента, то есть
Кроме того, реализация существующего способа связана со значительными трудностями, так как требует наличия большого числа управляемых фазосдвигающих устройств, управляемых линий задержки и др.
Наиболее близким по технической сущности к предлагаемому способу является способ зондирования пространства когерентными сигналами, излучаемыми N элементами, основанный на определении требуемых амплитуд An и фаз φn излучаемых сигналов в каждом n-м элементе передающей решетки (n=1, …, N) для обеспечения когерентного сложения сигналов в заданной области пространства, когерентном приеме отраженных сигналов каждым m-n приемником с регистрацией амплитуды и фазы (см. патент РФ №2483321, G01S 5/02, G01S 13/02. «Способ зондирования пространства когерентными сигналами». Понькин В.А., Иванкин А.В., Иванкин Е.Ф.).
Основным недостатком прототипа является низкая разрешающая способность системы по дальности, которая необходима при обнаружении и распознавании, в первую очередь, объектов военного назначения в условиях информационного конфликта. Это связано с использованием зондирующих сигналов одной частоты, что не позволяет добиться максимальной разрешающей способности по дальности.
Техническим результатом данного изобретения является повышение разрешающей способности системы по дальности за счет когерентной обработки сигналов разной частоты при сохранении потребляемой энергии, энергопотенциала и простоты конструкции РЛС.
Указанный результат достигается тем, что в способе радиолокационного зондирования пространства, заключающимся в излучении N элементами передающей решетки сигналов, с произвольными амплитудой A0n и фазой φ0n, их приеме М элементами приемной решетки, при этом М=N и когерентном их сложении, отличающийся тем, что излучают сигнал n-м элементам передающей решетки на частоте fn=f0+nΔf, где n=1, …, N, f0 - минимальная частота, Δf - шаг по частоте, а когерентное сложение осуществляют в соответствии с формулой
где Sm - результат когерентного сложения выходных сигналов элементов приемной решетки; A0nm, φ0nm - зарегистрированные амплитуда и фаза сигнала на выходе m-го элемента приемной решетки; kn - волновое число; c - скорость света.
Сущность предлагаемого способа состоит в следующем. В соответствии с линейностью известных уравнений Максвелла, описывающих электромагнитные явления в произвольных средах и в вакууме, будем считать, что процесс радиолокационного наблюдения, включающий излучение сигнала N элементами, его распространение, взаимодействие с объектами наблюдения, распространение рассеянного излучения и его прием в некотором пункте является линейным. Это означает, что излучаемый сигнал S и принятый сигнал Y в приемнике связаны между собой линейным оператором L
Важным для осуществления заявляемого способа является свойство линейных операторов, которое состоит в том, что если входное воздействие можно представить в виде весовой суммы  , где αn - постоянные, в общем случае комплексные числа, то выходной сигнал можно также представить в виде суммы с теми же коэффициентами
, где αn - постоянные, в общем случае комплексные числа, то выходной сигнал можно также представить в виде суммы с теми же коэффициентами  , где Ynm - выходной сигнал в m-м приемнике при воздействии Sn сигналом, излученным n-м элементом передающей решетки.
, где Ynm - выходной сигнал в m-м приемнике при воздействии Sn сигналом, излученным n-м элементом передающей решетки.
В заявляемом способе предусматривается зондирование пространства сигналами отдельных N элементов, поэтому Ynm в m-м приемнике для каждого входного сигнала определяется экспериментально. При этом произвольные амплитуда A0n, фаза φ0n на различных частотах fn в каждом N элементе не препятствуют восстановлению Ynm, поскольку их установка эквивалентна умножению зондирующего сигнала на комплексный коэффициент  , а устранение их влияния достигается нормированием зарегистрированного при этом выходного сигнала Y0nm путем деления на коэффициент α0n. После этого нормированные отклики
, а устранение их влияния достигается нормированием зарегистрированного при этом выходного сигнала Y0nm путем деления на коэффициент α0n. После этого нормированные отклики  можно суммировать с требуемыми для фазирования амплитудами An, фазами φn и волнового числа kn, описав их действие коэффициентом
можно суммировать с требуемыми для фазирования амплитудами An, фазами φn и волнового числа kn, описав их действие коэффициентом  . Таким образом приходим к формуле
. Таким образом приходим к формуле
Для реализации вычислительного процесса важной является операция когерентного приема, обеспечивающая в случае использования квазимонохроматического (дискретно-частотного) зондирующего сигнала полное извлечение радиолокационной информации об объекте наблюдения при регистрации амплитуды и фазы. Это позволяет представить выходные сигналы в виде комплексных чисел

с которыми свободно оперирует современная вычислительная техника.
С учетом (1) и (2) можно перейти к заявляемому алгоритму обработки, указанному в формуле изобретения

Таким образом, введение новых по сравнению с прототипом операций, заключающихся в том, что зондирование производится сигналами, излучаемыми отдельными N элементами, с произвольными амплитудой A0n, фазой φ0n на различной частоте fn и когерентном сложении результатов зондирования в каждом m-м приемном пункте, в соответствии с формулой (3), позволяет увеличить ширину спектра, за счет разницы частот во всех N элементах, что является основой увеличения разрешающей способности по дальности всей системы.
Кроме заявленного способа излучения сигналов разной частоты, также можно использовать вместо простых сигналов - сложные, такие как, например, сигналы с линейной частотной модуляцией (ЛЧМ-сигналы) или бинарные, использующие две градации фазы, фазоманипулированные сигналы. Но при этом наличие у сложных сигналов внутриимпульсной модуляции приводит к тому, что их генерация и обработка при приеме сложнее, чем для простых сигналов. Поэтому, при сохранении энергопотенциала и простоты конструкции РЛС, реальное увеличение разрешающей способности системы при использовании множества простых сигналов различной частоты равно
Δr=с/ΔF,
где Δr - разрешающая способность по дальности; c - скорость света; ΔF - общая ширина спектра сигналов.
С другой стороны, технический эффект явным образом не следует из общих принципов зондирования пространства когерентными сигналами и может быть достигнут только при проведении предложенной в изобретении последовательности действий.
Проведенный анализ уровня техники позволил установить, что аналоги, характеризующиеся совокупностью признаков, идентичных всем признакам заявляемого технического решения, отсутствуют, что указывает на соответствие заявляемого изобретения условию патентоспособности «новизна».
Заявляемое техническое решение промышленно применимо, так как может использоваться в радиолокации и для его реализации могут быть пригодны стандартное оборудование и приборы.
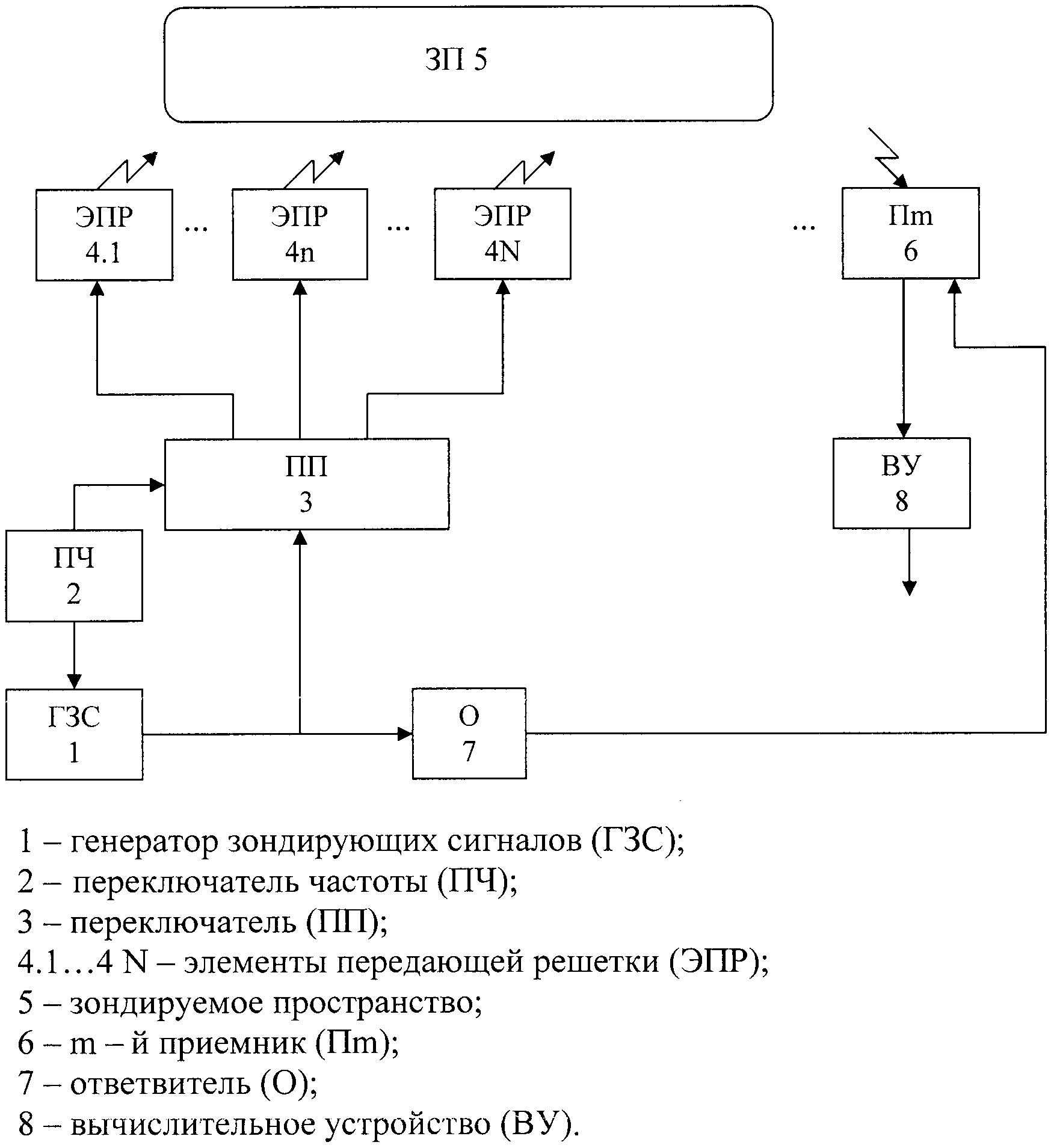
На чертеже представлен вариант структурной схемы устройства, реализующего способ зондирования пространства радиолокационными сигналами разной частоты, излучаемыми N элементами, где используются следующие обозначения:
1 - генератор зондирующих сигналов (ГЗС);
2 - переключатель частоты;
3 - переключатель;
4.1,…,4N - элементы передающей решетки (ЭПР);
5 - зондируемое пространство;
6 - m-й приемник;
7 - ответвитель;
8 - вычислительное устройство.
Устройство содержит генератор зондирующих сигналов (ГЗС) 1, частота на котором регулируется переключателем частоты 2, выход ГЗС 1 соединен со входом переключателя 3 элементов передающей решетки (N элементы) 4.1…4.N, также переключатель 3 соединен с переключателем частоты 2, передающий значение текущей частоты. Апертуры N элементов 4.1…4.N направлены в сторону зондируемого пространства 5, в область которого ориентирован m-й приемник 6, который через ответвитель 7 соединен с выходом ГЗС 1, а выход m-го приемника 6 подключен к вычислительному устройству 8. Выход вычислительного устройства 8 является выходом устройства, реализующего заявленный способ зондирования. Принцип работы переключателя частоты заключается в изменении частот зондирующих сигналов на заданный Δf и передачи значений частот на переключатель 3 и через ГЗС 1 и ответвитель 7 на m-й приемник 6.
Устройство, реализующее заявленный способ, работает следующим образом.
ГЗС 1 формирует когерентный сигнал заданной переключателем частоты 2, который поступает на вход переключателя 3. Переключатель 3 последовательно подает сигнал на входы N элементов 4.1…4.N, которые облучают зондирующее пространство 5 сигналами с произвольно сформировавшимися в процессе их излучения амплитудой A0n, фазой φ0n и различной частотой fn. Сигнал, отраженный от зондируемого пространства 5, поступает на вход m-го приемника 6, в котором с использованием опорного сигнала, поступающего от ГЗС 1, через ответвитель 6 осуществляются когерентный прием и измерение амплитуды A0nm, и фазы φ0nm принятого сигнала, значения которых поступают в вычислительное устройство 8. В вычислительном устройстве 8 осуществляется нормирование сигнала в виде  с учетом излучаемых амплитуд A0n, фаз φ0n и частоты fn и когерентное сложение нормированных сигналов в соответствии с выражением (3).
с учетом излучаемых амплитуд A0n, фаз φ0n и частоты fn и когерентное сложение нормированных сигналов в соответствии с выражением (3).
Оценку технического результата заявляемого способа (повышение разрешающей способности по дальности системы) можно провести на основе следующих рассуждений.
В прототипе при одновременном излучении когерентных сигналов N элементов их частота является постоянной, из чего следует, что ширина спектра (ΔF) постоянна и ограничена выбранной частотой, что существенно влияет на разрешающую способность по дальности всей системы в целом
В заявляемом способе ЗП последовательно облучается сигналами разной частоты отдельных N элементов. В этой связи технический результат данного изобретения казалось бы очевиден и обеспечивал бы разрешающую способность, равную
Δr=с/ΔF,
где Δr - разрешающая способность по дальности; c - скорость света; ΔF - общая ширина спектра сигналов. В прототипе же разрешающая способность определялась исходя из частоты сигнала.
Таким образом заявляемый способ обеспечивает достижение существенного технического эффекта, а практическая реализация способа может быть осуществлена на базе более простых технических средств с соответствующим изменением алгоритмов и программ обработки результатов измерений.
Способ радиолокационного зондирования пространства, заключающийся в излучении N элементами передающей решетки сигналов, с произвольными амплитудой A и фазой φ, их приеме M элементами приемной решетки, при этом M=N, и когерентном их сложении, отличающийся тем, что излучают сигнал n-м элементам передающей решетки на частоте f=f+nΔf, где n=1, …, N; f - минимальная частота; Δf - шаг по частоте, а когерентное сложение осуществляют в соответствии с формулой где S - результат когерентного сложения выходных сигналов элементов приемной решетки; A, φ - зарегистрированные амплитуда и фаза сигнала на выходе m-го элемента приемной решетки; k - волновое число; c - скорость света.
Сопло ракетного двигателя
Мобильное устройство для удерживания летательных аппаратов легче воздуха
Клапан для регулирования горячего газа
Пиротехническое азотгенерирующее устройство
Способ прочностных испытаний кинематической цепи привод - регулирующий элемент сопловых регулируемых блоков и сопловой регулируемый блок для его осуществления
Устройство крепления и отделения всплывающего буя с трос-кабелем на подводном техническом средстве
Газораспределительный клапан
Бесконтактный датчик углового положения
Рабочее оборудование траншейно-котлованной машины и опорная конструкция для рабочего оборудования
Парашют (варианты)
Способ оценки точности геометрической модели местности при ее автоматическом построении
Способ идентификации космических объектов искусственного происхождения в космическом пространстве
Малогабаритный буксировщик воздушных судов с дистанционным управлением
Вероятностная спутниковая система для мониторинга лесных пожаров

